一、拟合原理
opencv自带有最小二乘法拟合直线,但遇到有干扰点的时候,由于最小二乘法是将所有点代入矩阵进行求解,最终误差平方和最小即是最优直线,此时干扰点就会带入误差,效果很差。
随机采样一致算法,它是从一堆含干扰点的数据中,按照筛选条件划分为内点和外点,内点是组成模型的数据,外点是不适合模型的数据。
基本思想和流程如下:
bash
1.给定一个数据集***S***,从中选择建立模型所需的最小样本数(空间直线最少可以由两个点确定,所以最小样本数是2,空间平面可以根据不共线三点确定,所以最小样本数为3,拟一个圆时,最小样本数是3),记选择数据集为***S1***
2.使用选择的数据集***S1***计算得到一个数学模型***M1***
3.用计算的模型***M1***去测试数据集中剩余的点,如果测试的数据点在误差允许的范围内,则将该数据点判为内点(inlier),否则判为外点(outlier),记所有内点组成的数据集为***S1****,S1* 称作 ***S1***的一致性集合
4.比较当前模型和之前推出的最好的模型的"内点"的数量,记录最大"内点"数量时模型参数和"内点"数量
5.重复1-4步,直到迭代结束或者当前模型已经足够好了("内点数目大于设定的阈值");每次产生的模型要么因为内点太少而被舍弃,要么因为比现有的模型更好而被选用以RANSAC直线拟合为例,如下图所示,首先在点集中随机选择两个点,求解它们构成的直线参数,再计算点集中剩余点到该直线的距离,距离小于设置的距离阈值的点为内点,统计内点个数;接下来再随机选取两个点,同样统计内点个数,以此类推;其中内点个数最多的点集即为最大一致集.
此时意味着拟合的直线必然是随机两个点组成的直线,为了拟合精度更高,可以将最大一致集的内殿再使用最小二乘拟合出最终直线。
二、代码实现逻辑
cpp
/// <summary>
/// ransac拟合直线
/// </summary>
/// <param name="points">输入点集</param>
/// <param name="line">输出直线方程</param>
/// <param name="iterations">拟合次数</param>
/// <param name="sigma">内点距离阈值</param>
/// <returns></returns>
bool fitLineRansac(const std::vector<cv::Point2f> points, cv::Vec4f& line, int iterations, double sigma)三、效果
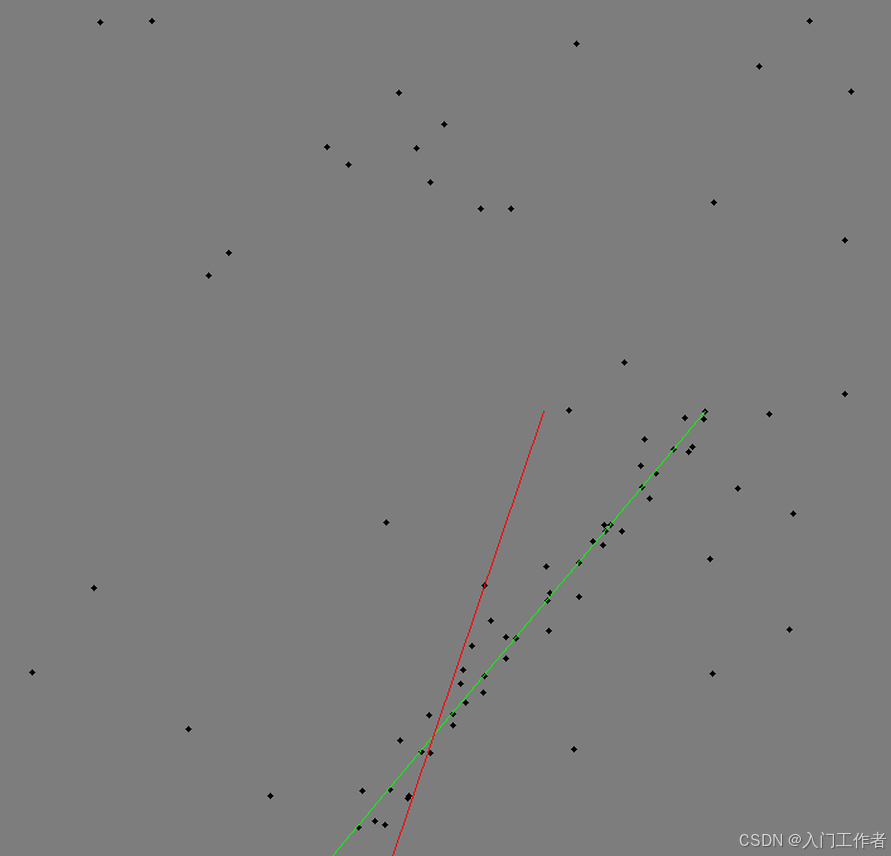
红色为最小二乘结果,绿色为ransac+最小二乘结果
当然,工程上还有一些简单粗暴的方法,按照所有点到拟合直线的距离进行筛选,筛选后再进行拟合。
获取源码请私信