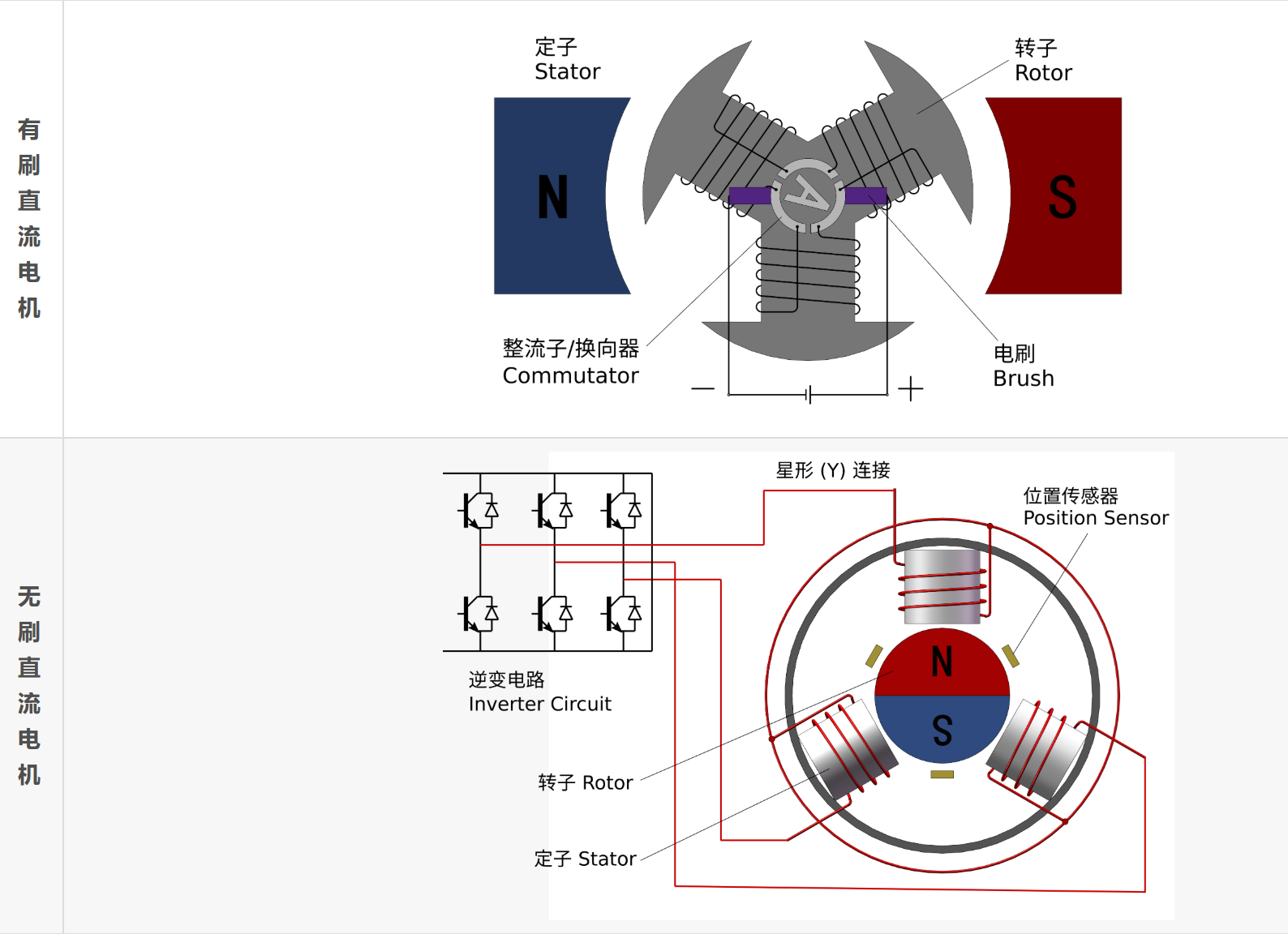
直流电机的原理
无刷直流电机:通过逆变电路实现驱动换向
有刷直流电机:通过电刷和换向器实现换向
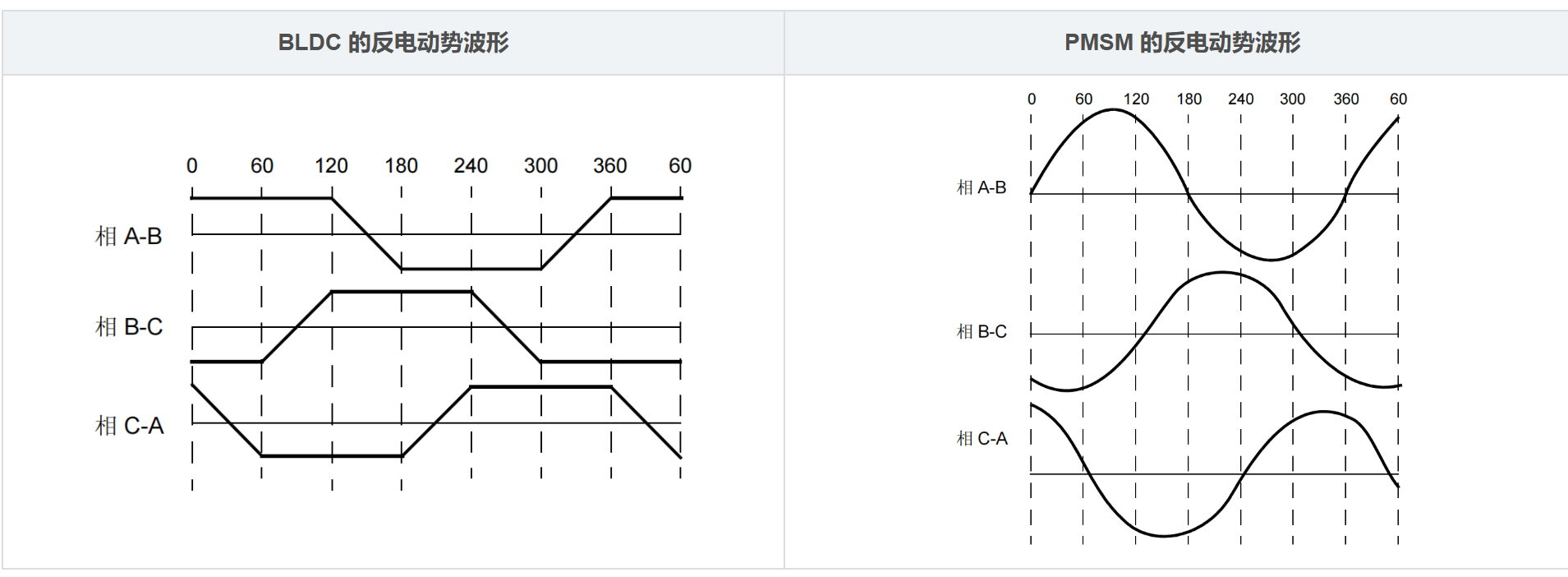
另外还有一种电机和无刷直流电机 (BLDC) 很像, 就是永磁同步电机 (Permanent Magnet Synchronous Motors, PMSM).
两者的主要区别是反电动势的波形. BLDC 反电动势接近于梯形波, 而 PMSM 反电动势接近于正弦波.
BLDC 径向充磁的表贴式磁钢感应产生平顶度很宽的梯形波反电势.
但是现实世界中的波形一般都不完美, 还不足以反电动势 100% 区分两者.
但如果结合定子绕组形式 (BLDC 多集中式, PMSM 多分布式)、价格 (BLDC 相对便宜, PMSM 相对较贵)、应用场合 (移动机器人多用 BLDC, 新能源汽车多用 PMSM) 这些综合判断的话, 两者区分度还是很大的.
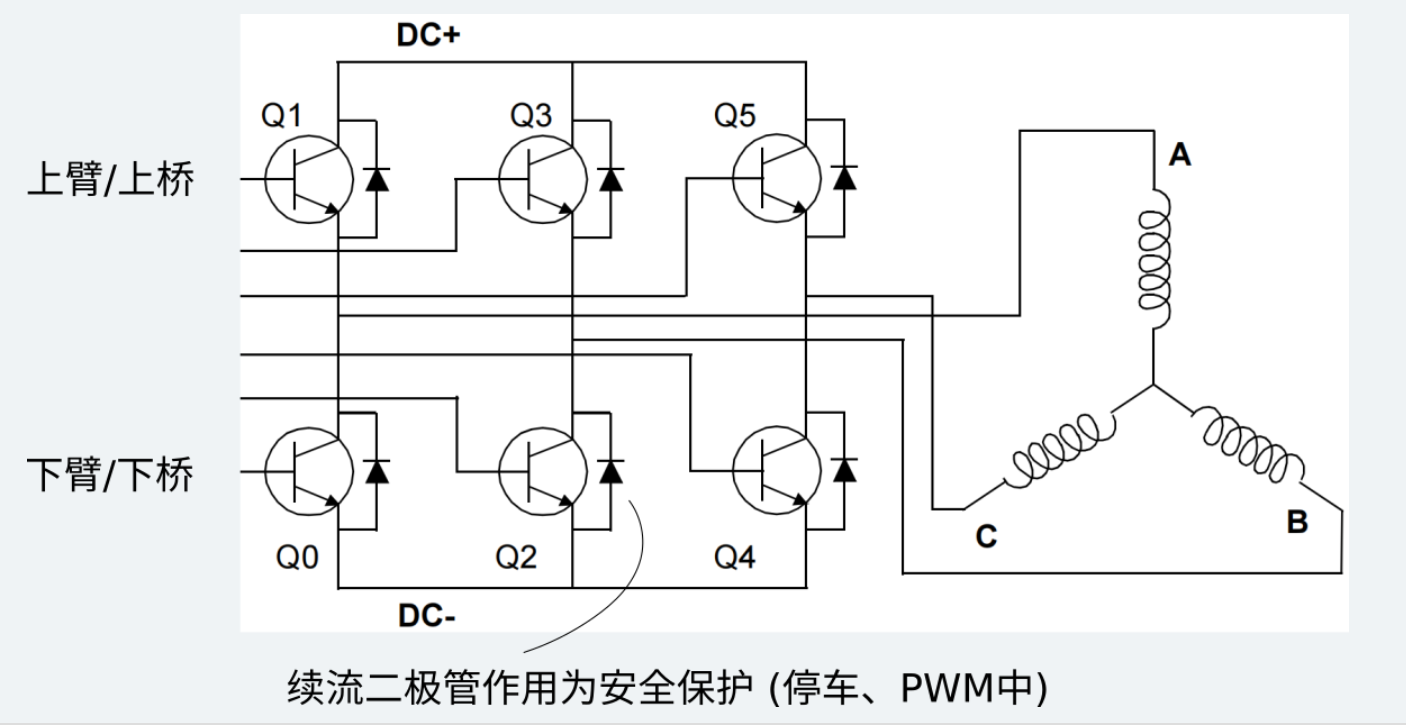
为了实现定子磁场的旋转 (即六步换向), 需要交替有序地导通定子的三相电极. 而实现三相电极交替导通的驱动电路为三相全桥逆变电路, 控制上按照六步换向时序进行控制.
无刷直流电机的换向检测
无刷直流电机要实现六步换向时序控制, 需要通过检测 (反馈) 手段, 进行换向同步驱动控制.
根据不同的检测手段, 又将 BLDC 的驱动控制分为有感驱动和无感驱动两类.
|----------|----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| 有感驱动 | 霍尔传感器 (BLDC 有感控制中最常用的传感器) 采集转子位置信号, 再根据霍尔信号进行电流换相 优点: 电机启动和低速时可以做到大力矩输出;启动时不会有抖动, 非常顺畅 缺点: 霍尔自身比较敏感脆弱易受干扰;增加信号线 (+5根) 和安装结构;增加体积和成本 应用场景: 车模和船模中的电调多是使用 "有感" 方式, 因为其电机需要频繁启动、停止、反转 |
| 无感驱动 | 不需要外部位置传感器, 通过检测悬空相的反电动势的过零点, 进行换向控制 优点: 成本和结构上有了大的简化;外置驱动时电机只有三根相线 缺点: 带载、满载启动容易抖动或启动失败, 只适合固定负载启动或者空载启动的场合无感控制启动的时候可控性较差, 要达到一定转速后才变得可控 应用场景: 航模/无人机一般用 "无感" 方式, 因为航空发动机一旦转起来后, 在空中不需要停车 |
无刷直流电机的有感控制
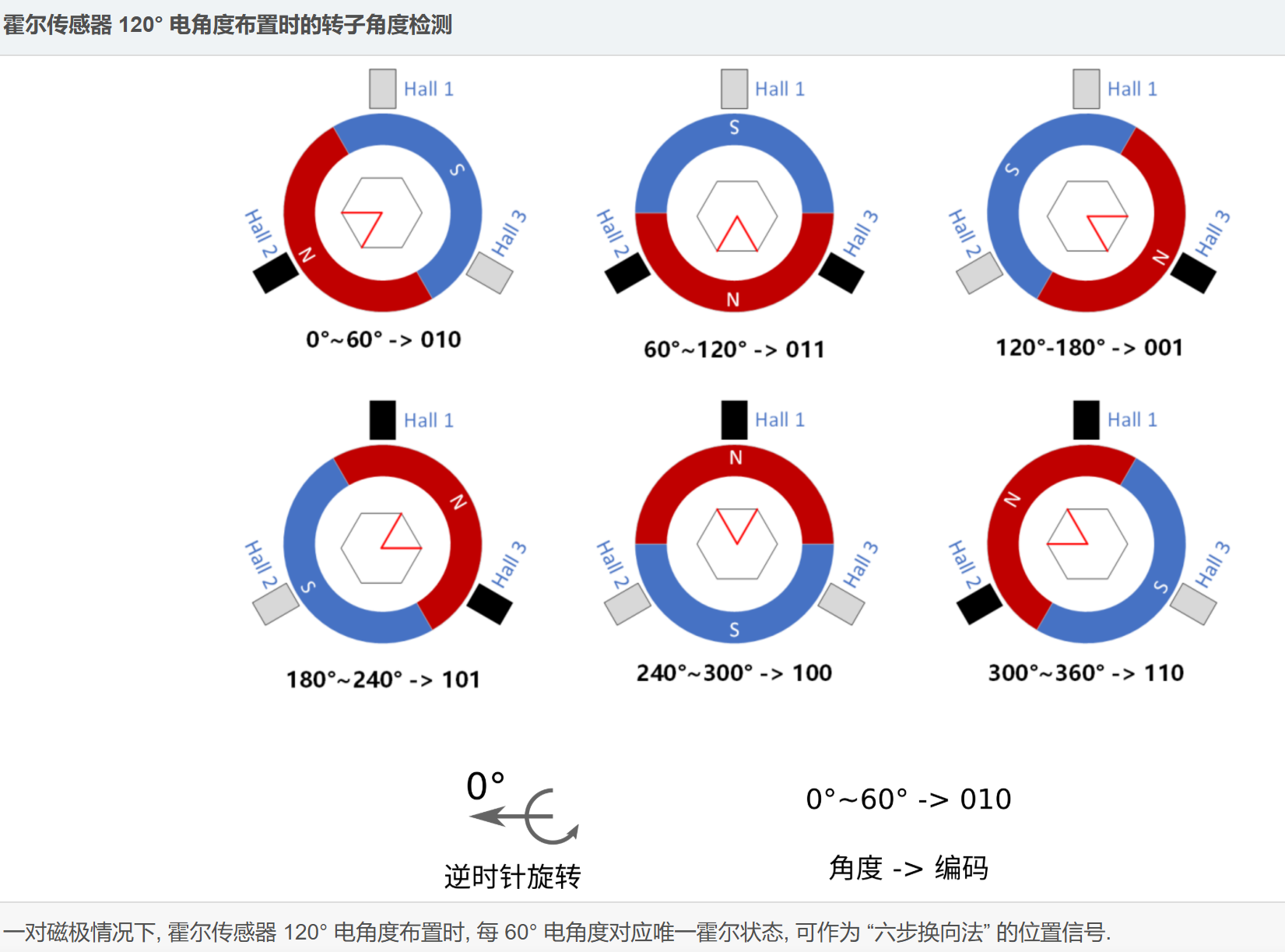
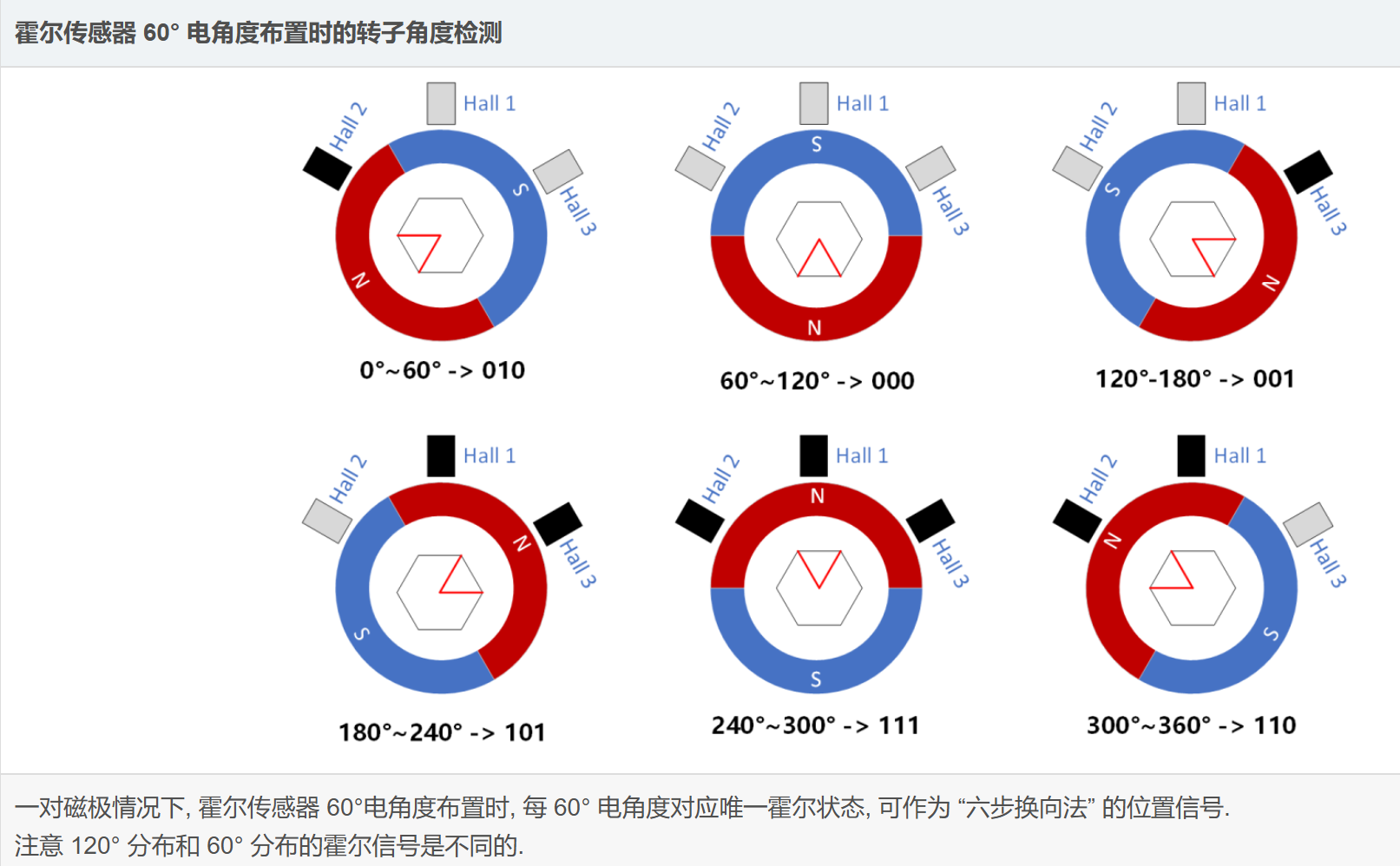
1. 有感控制的霍尔检测
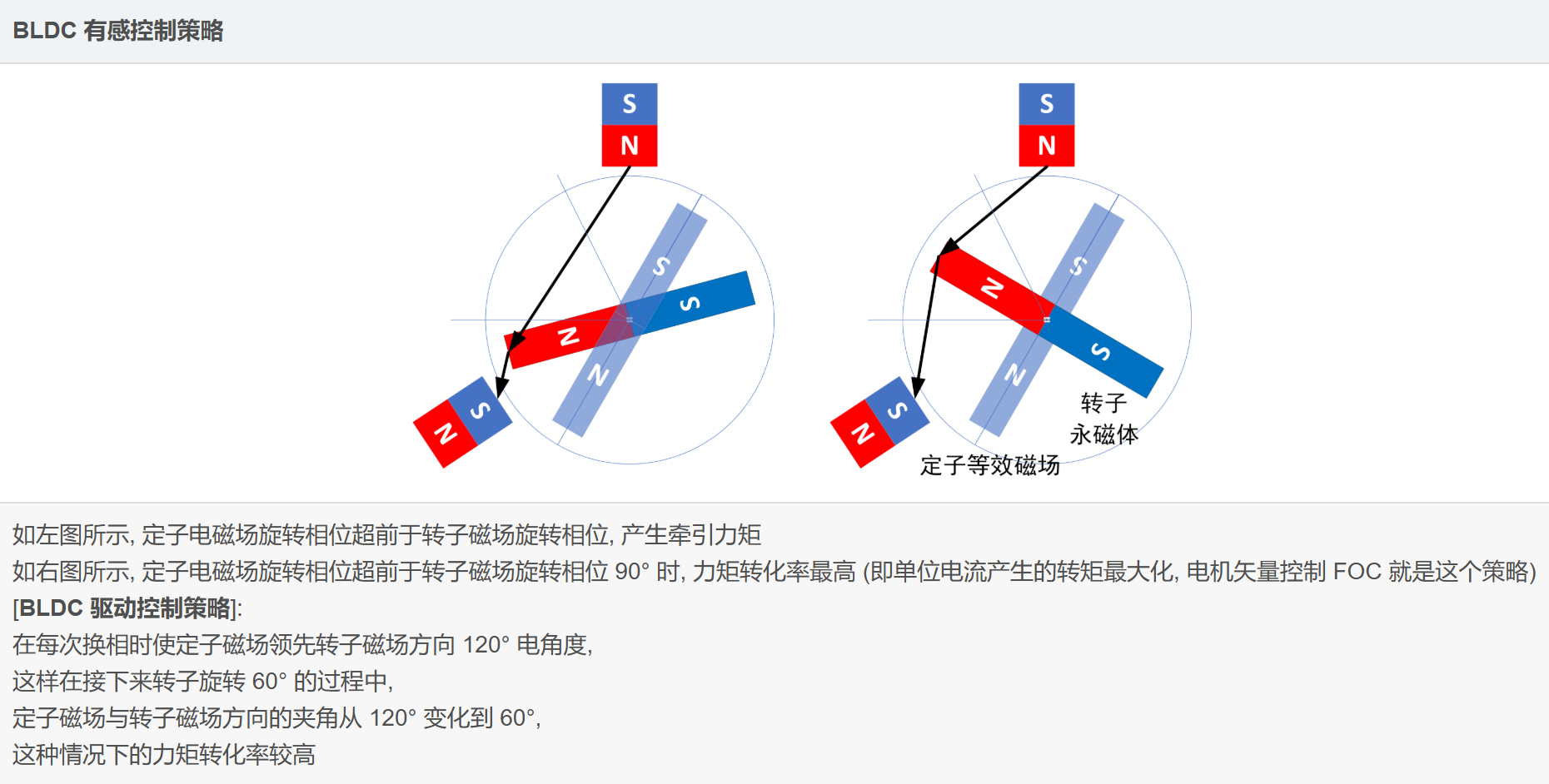
2. 有感控制策略
3. 有感控制律
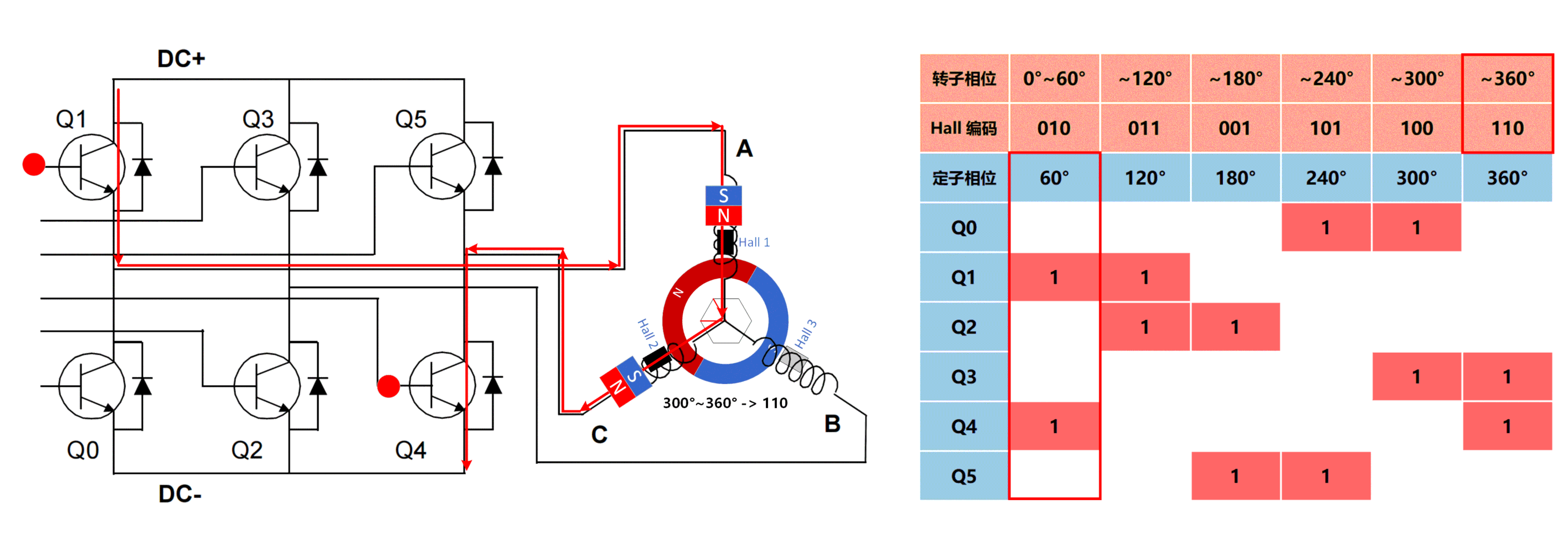
BLDC 有感控制就是通过位置传感器获得转子的位置 (转角), 然后通过控制定子线圈中的电流导通实现对定子磁场的调制.
使得定子磁场相位领先于转子转角相位 60°~ 120° 之间 (电角度), 这样定子磁场始终能够以较高的效率驱动转子的转动.
定子磁场就是根据转子位置数据的反馈而进行控制. 位置传感器一般选用较廉价的霍尔传感器.
从下面各 BLDC 逆时针旋转的有感控制律图片中也可以看出:
-
转子相位进入 300° ~ 360° 区间时, 定子相位马上被控制到 60° 上;
-
转子相位达到 0° ~ 60° 区间时, 定子相位马上被控制到 120° 上;
(依此类推) ... ...
霍尔传感器检测作用是确定和触发 "六步换向法" 中的换向时机, 产生最优电能-机械能转换效率.