基于YOLO26 Pose实现车牌检测
1. 背景介绍
1.1 车牌检测任务概述
车牌检测是计算机视觉中的重要任务,传统方法需要多个模型级联处理。本文介绍一种创新的方法:使用YOLO26 Pose模型直接检测车牌的四个角点坐标,这是一种高效的统一检测框架。
相比传统方案:
- ✅ 一次性检测:直接输出角点坐标,无需级联多个模型
- ✅ 实时性能:在单个GPU上可达到实时推理速度
- ✅ 易于部署:基于成熟的YOLO框架,部署和优化方案完善
- ✅ 高准确率:利用深度学习的强大特征提取能力
1.2 传统方案 vs 创新方案
❌ 传统方案
图像
车牌检测器
R-CNN系列
边界框
特征提取器
角点预测器
四个角点
✅ 我们的方案
图像
YOLO26 Pose
边界框 + 4个关键点坐标
优势:
- 端到端学习:框和关键点同时优化
- 减少冗余:不需要多个独立的模型
- 更快收敛:共享骨干网络的表示学习
2. 方案介绍
2.1 YOLO26 Pose 模型架构
YOLO (You Only Look Once)系列是目标检测领域的基准模型,而YOLO26 Pose是其最新一代用于关键点检测的变体。
输入图像
640×640
Backbone
CSPDarknet
Neck
PAN特征融合
Head
检测头
边界框
x, y, w, h
关键点
4个角点坐标
2.2 关键点定义
对于车牌,我们定义4个关键点:
车牌关键点定义
0 左上
1 右上
2 左下
3 右下
每个关键点格式: (x, y, confidence)
- x, y: 像素坐标
- confidence: 检测置信度
2.3 模型选择建议
| 模型 | 参数量 | 模型大小 | 推理速度(ms) | mAP |
|---|---|---|---|---|
| YOLO26n-pose | 3.3M | 6.3MB | 6 | 52.1 |
| YOLO26s-pose | 11.6M | 22.6MB | 12 | 62.5 |
| YOLO26m-pose | 26.4M | 49.7MB | 28 | 67.3 |
| YOLO26l-pose | 44.8M | 84.0MB | 50 | 69.8 |
选择建议:
- 🚀 实时性要求高 → YOLO26n-pose
- ⚖️ 平衡性能 → YOLO26s-pose (推荐)
- 🎯 高精度要求 → YOLO26l-pose
3. 环境准备
3.1 安装依赖
bash
# 创建虚拟环境(推荐)
python -m venv venv
source venv/bin/activate
# 安装YOLO26(最新版本)
pip install ultralytics
# 安装依赖
pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
pip install opencv-python numpy pyyaml3.2 下载预训练模型
python
# 自动下载(首次运行时)
from ultralytics import YOLO
model = YOLO("yolo26s-pose.pt")3.3 验证环境
bash
# 验证YOLO26安装
python -c "from ultralytics import YOLO; model = YOLO('yolo26s-pose.pt'); print('YOLO26加载成功')"
# 验证GPU可用
python -c "import torch; print('GPU可用' if torch.cuda.is_available() else 'GPU不可用')"4. 数据集配置
4.1 数据集结构
dataset
images
labels
data.yaml
train
val
test
train
val
test
img001.jpg
img002.jpg
img001.txt
img002.txt
4.2 标注文件格式
每个图像对应一个 .txt 文件,格式为:
<class_id> <x_center> <y_center> <width> <height> <kpt_x1> <kpt_y1> <kpt_conf1> ... <kpt_x4> <kpt_y4> <kpt_conf4>具体例子:
0 0.5 0.6 0.3 0.2 0.35 0.50 1 0.65 0.50 1 0.35 0.70 1 0.65 0.70 1参数说明:
0- 类别ID(0=车牌)0.5 0.6- 边界框中心 (归一化坐标 0-1)0.3 0.2- 边界框宽高 (归一化)0.35 0.50 1- 关键点1 (左上角): x, y, 置信度0.65 0.50 1- 关键点2 (右上角): x, y, 置信度0.35 0.70 1- 关键点3 (左下角): x, y, 置信度0.65 0.70 1- 关键点4 (右下角): x, y, 置信度
4.3 配置文件
yaml
# 数据集配置示例
path: ./dataset # 数据集根路径
train: images/train # 训练集路径
val: images/val # 验证集路径
test: images/test # 测试集路径
nc: 1 # 类别数量(只有车牌1个类)
names: ['plate'] # 类别名称
kpt_shape: [4, 3] # 关键点形状: [点数=4, 维度=3(x,y,conf)]创建命令:
bash
cat > dataset/data.yaml << 'EOF'
path: ./dataset
train: images/train
val: images/val
test: images/test
nc: 1
names: ['plate']
kpt_shape: [4, 3]
EOF4.4 标注工具推荐
| 工具 | 特点 | 说明 |
|---|---|---|
| Roboflow | 在线标注+格式转换 | 支持导出为YOLO26格式,带数据增强 |
| LabelImg | 轻量级桌面工具 | 可标注边界框,需要脚本转换为关键点 |
| CVAT | 企业级标注平台 | 功能完整,支持多种任务类型 |
| Labelme | 多边形标注 | 可标注多边形,脚本转换为关键点 |
5. 模型训练代码
5.1 完整训练脚本
python
#!/usr/bin/env python3
"""
车牌关键点检测训练脚本 - Pose任务
基于YOLO26 Pose模型
用于检测车牌的四个角点位置
"""
import os
from pathlib import Path
from ultralytics import YOLO
def train_model(data_yaml_path, task='pose'):
"""训练YOLO26 Pose模型"""
print("="*50)
print("开始加载模型...")
# 加载预训练Pose模型
model = YOLO("yolo26s-pose.pt")
print("模型加载完成")
# 开始训练
print("="*50)
print("开始训练...\n")
results = model.train(
data=data_yaml_path,
task=task,
epochs=100,
imgsz=640,
batch=256,
device=0,
workers=4,
project="./results",
name="plate_detection",
exist_ok=True,
amp=True, # 混合精度训练 (推荐)
patience=20, # 早停机制
save=True,
save_period=10,
cache=True,
verbose=True,
# 数据增强参数
flipud=0.5, # 纵向翻转
fliplr=0.5, # 横向翻转
degrees=10, # 旋转
hsv_h=0.015, # 色度调整
hsv_s=0.7, # 饱和度调整
hsv_v=0.4, # 亮度调整
translate=0.1, # 平移
scale=0.5, # 缩放
mosaic=1.0, # Mosaic增强
mixup=0.0, # Mixup增强
close_mosaic=10, # 最后10个epoch关闭Mosaic
weight_decay=0.0005, # 权重衰减
lr0=0.001, # 初始学习率
lrf=0.01, # 最终学习率系数
)
return results
def main():
print("=" * 50)
print("车牌关键点检测模型训练")
print("任务: 检测4个角点 (Pose)")
print("=" * 50)
data_yaml_path = "./dataset/data.yaml"
if not Path(data_yaml_path).exists():
print(f"\n错误: 配置文件不存在,请检查路径: {data_yaml_path}")
return
print(f"\n使用配置文件: {data_yaml_path}\n")
# 开始训练
results = train_model(data_yaml_path, task='pose')
print("\n" + "=" * 50)
print("训练完成!")
print(f"最优模型: ./results/plate_detection/weights/best.pt")
print(f"最后模型: ./results/plate_detection/weights/last.pt")
print("=" * 50)
if __name__ == "__main__":
main()5.2 训练参数说明
python
results = model.train(
data=data_yaml_path, # 数据集配置
task='pose', # 关键点检测任务
epochs=100, # 训练轮数
imgsz=640, # 输入分辨率
batch=256, # 批量大小
device=0, # GPU编号
amp=True, # 混合精度训练
patience=20, # 早停耐心值
# 数据增强
flipud=0.5, # 50%纵向翻转
fliplr=0.5, # 50%横向翻转
degrees=10, # 旋转角度范围
scale=0.5, # 尺度变换
mosaic=1.0, # Mosaic增强
)5.3 启动训练
bash
python train_pose.py6. 模型推理代码
6.1 单张图像推理
python
from ultralytics import YOLO
import cv2
import numpy as np
def detect_plate_keypoints(image_path, model_path):
"""
检测图像中的车牌和关键点
Returns:
results: YOLO26检测结果
detections: 解析后的检测结果 [{
'bbox': [x_min, y_min, x_max, y_max],
'keypoints': [(x1,y1,conf1), (x2,y2,conf2), ...],
'confidence': float
}, ...]
"""
# 加载模型
model = YOLO(model_path)
# 执行推理
results = model(image_path)
# 解析结果
detections = []
for result in results:
for box, kpts in zip(result.boxes, result.keypoints):
# 边界框
bbox = box.xyxy[0].cpu().numpy()
conf = box.conf[0].item()
# 关键点
keypoints = []
for i in range(4):
x = kpts.xy[0][i][0].item()
y = kpts.xy[0][i][1].item()
confidence = kpts.conf[0][i].item()
keypoints.append((x, y, confidence))
detections.append({
'bbox': bbox,
'keypoints': keypoints,
'confidence': conf
})
return results, detections
# 使用
if __name__ == "__main__":
image_path = "test_image.jpg"
model_path = "./results/plate_detection/weights/best.pt"
results, detections = detect_plate_keypoints(image_path, model_path)
print(f"检测到 {len(detections)} 个车牌")
for i, det in enumerate(detections):
print(f"车牌 {i+1}:")
print(f" 置信度: {det['confidence']:.2f}")
print(f" 关键点: {det['keypoints']}")6.2 批量推理
python
from pathlib import Path
from ultralytics import YOLO
def batch_detect(image_dir, model_path, output_dir):
"""批量检测图像"""
model = YOLO(model_path)
output_dir = Path(output_dir)
output_dir.mkdir(exist_ok=True)
image_files = list(Path(image_dir).glob("*.jpg")) + \
list(Path(image_dir).glob("*.png"))
for image_file in image_files:
print(f"处理: {image_file.name}")
results = model(str(image_file))
# 保存结果
result_name = image_file.stem + "_result.jpg"
results[0].save(output_dir / result_name)
# 使用
batch_detect("./test_images",
"./results/plate_detection/weights/best.pt",
"./output_results")6.3 可视化结果
python
def visualize_detections(image_path, detections, output_path):
"""
可视化检测结果
"""
img = cv2.imread(image_path)
for det in detections:
bbox = det['bbox'].astype(int)
keypoints = det['keypoints']
conf = det['confidence']
# 绘制边界框
cv2.rectangle(img,
(bbox[0], bbox[1]),
(bbox[2], bbox[3]),
(0, 255, 0), 2)
# 绘制关键点
colors = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0)]
labels = ['左上', '右上', '左下', '右下']
for i, (x, y, kpt_conf) in enumerate(keypoints):
x, y = int(x), int(y)
cv2.circle(img, (x, y), 5, colors[i], -1)
cv2.putText(img, labels[i], (x+5, y-5),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, colors[i], 1)
# 绘制置信度
cv2.putText(img, f"Conf: {conf:.2f}",
(bbox[0], bbox[1]-10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)
# 保存
cv2.imwrite(output_path, img)
print(f"结果已保存: {output_path}")7. 结果显示
7.1 训练过程输出

7.2 训练结果文件
bash
# 查看结果目录
ls ./results/plate_detection/
# 包含文件:
# - weights/best.pt 最优模型
# - weights/last.pt 最后模型
# - results.csv 训练日志
# - confusion_matrix.png 混淆矩阵
# - results.png 训练曲线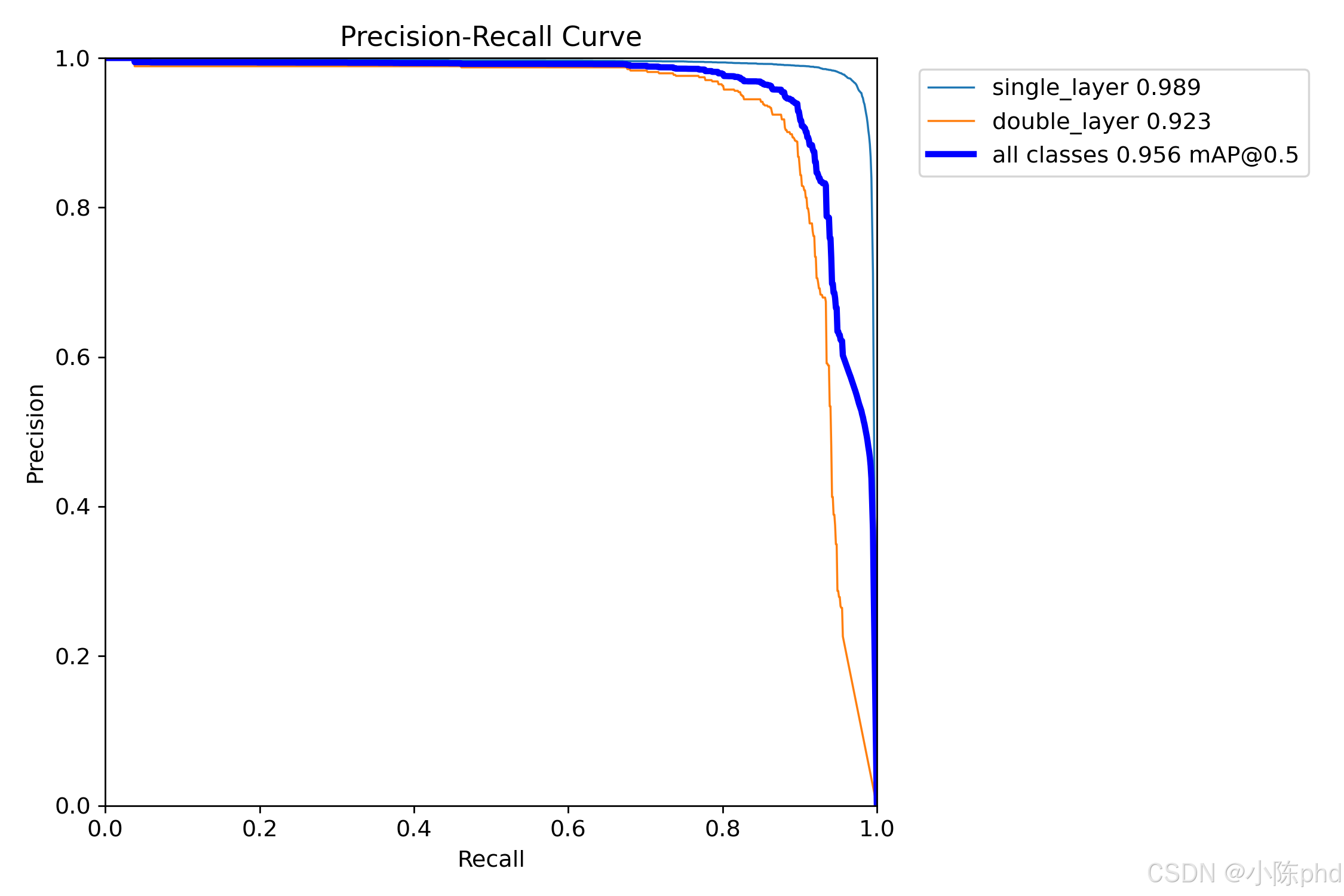
7.3 性能指标
python
from ultralytics import YOLO
def evaluate_model(model_path, data_yaml_path):
"""评估YOLO26模型性能"""
model = YOLO(model_path)
# 评估
metrics = model.val(data=data_yaml_path, imgsz=640)
print("评估结果:")
print(f"Box mAP50: {metrics.box.map50:.3f}")
print(f"Box mAP: {metrics.box.map:.3f}")
print(f"Pose mAP50: {metrics.pose.map50:.3f}")
print(f"Pose mAP: {metrics.pose.map:.3f}")
return metrics
# 使用
evaluate_model(
"./results/plate_detection/weights/best.pt",
"./dataset/data.yaml"
)8. 常见问题
Q1: 训练时GPU显存不足?
解决方案:
python
# 减小批量大小
batch=128 # 从256改为128
# 或减小输入分辨率
imgsz=416 # 从640改为416Q2: 模型准确率不够高?
优化策略:
python
# 1. 增加训练轮数
epochs=200
# 2. 增强数据增强强度
mosaic=1.0
mixup=0.1
degrees=15
# 3. 使用更大的模型
model = YOLO("yolo26l-pose.pt")Q3: 推理速度太慢?
加速方案:
python
# 1. 模型优化
model = YOLO("yolo26n-pose.pt")
# 2. 导出为ONNX (CPU快速推理)
model.export(format='onnx')
# 3. 导出为TensorRT (GPU快速推理)
model.export(format='engine')Q4: 如何部署到移动设备?
方案:
python
# 导出为TFLite (移动设备)
model.export(format='tflite')
# 或导出为CoreML (iOS)
model.export(format='coreml')
# 或导出为ONNX (跨平台)
model.export(format='onnx')参考资源
希望这篇指南对您有帮助!有任何问题欢迎提问。