三维非线性目标跟踪仿真系统,利用无迹卡尔曼滤波处理从球坐标(距离、方位角、俯仰角)到笛卡尔坐标的非线性转换与状态估计,并结合RTS平滑算法利用全时段数据反向修正历史轨迹;程序涵盖了从系统建模、含噪数据生成、前向滤波、后向平滑到多维误差统计与可视化的全流程
原创代码,请勿翻卖
文章目录
程序简介
高精度的三维目标跟踪仿真系统,旨在解决传感器观测数据(如雷达测量的距离和角度)含有噪声且是非线性数据的问题。首先模拟目标在空中的真实飞行轨迹以及传感器采集到的带有干扰的数据,利用无迹卡尔曼滤波算法进行实时的轨迹修正,避免了传统算法在处理非线性角度时的计算误差。
最后引入RTS平滑算法,利用完整的时间序列数据对历史轨迹进行反向修正和打磨。
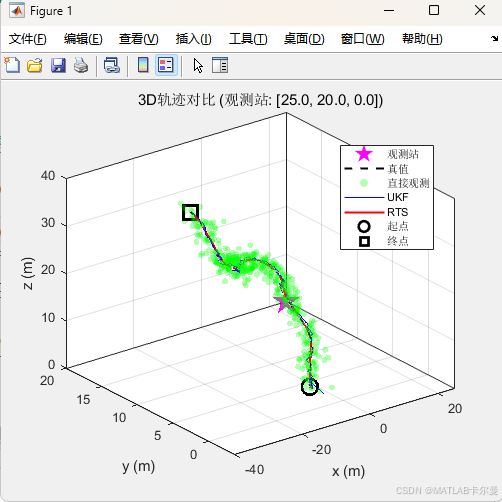
程序通过直观的三维轨迹图和多维度的误差统计图表,展示了经过这套算法处理后,原本杂乱的观测点是如何被还原成一条平滑、精准的飞行轨迹的,体现了算法在提升定位精度方面的强大能力。
运行结果
轨迹对比:
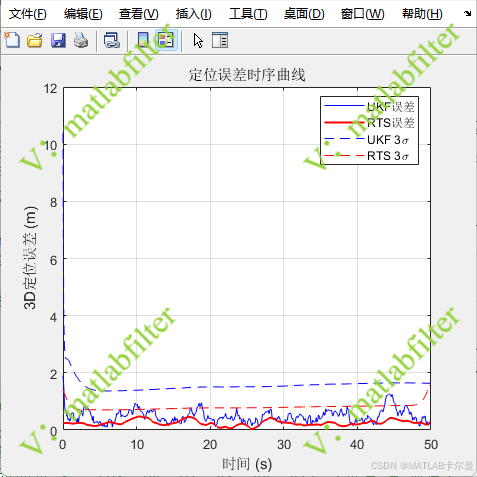
误差曲线(包含3σ范围曲线):
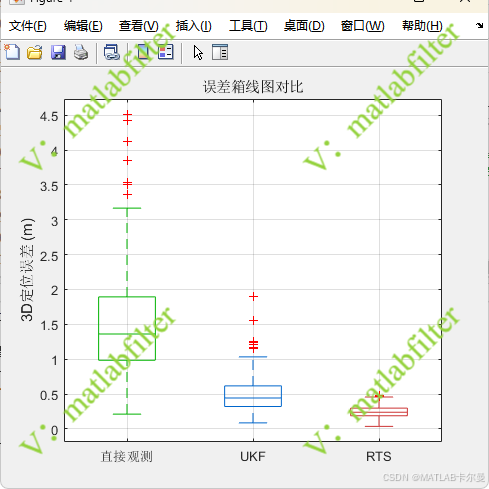
误差箱型图:
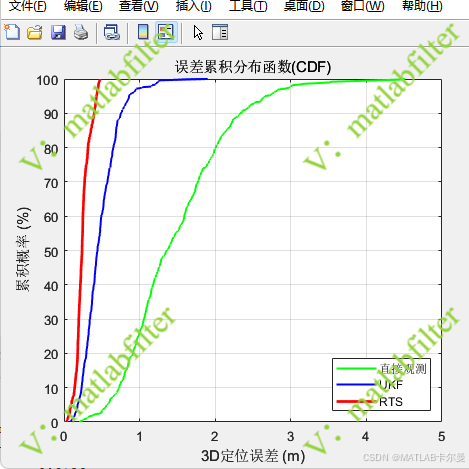
误差CDF:
MATLAB源代码
代码如下:
matlab
%% 三维非线性目标跟踪,观测为距离+方位角+俯仰角,UKF与RTS平滑
% 作者: matlabfilter(V同号,可接代码定制、讲解与调试)
% 2026-04-07/Ver1
clear; clc; close all;
rng(0); % 设置随机数种子,保证每次运行结果一致,便于复现
%% 参数设置与时间离散化
dt = 0.1; % 采样时间间隔 (s)
T = 50; % 总仿真时间 (s)
N = T/dt; % 总采样点数
t = (0:N-1)*dt; % 时间序列
% 传感器配置
sensor_pos = [25; 20; 0]; % [x; y; z]: 传感器在三维空间中的固定位置
% 系统模型:6x6 常速度模型
% 状态向量 X = [px, py, pz, vx, vy, vz]' (位置 + 速度)
F = eye(6); % 状态转移矩阵初始化为单位阵
% 根据常速度模型更新位置部分:p(k) = p(k-1) + v(k-1)*dt
F(1,4) = dt; % x位置受x速度影响
F(2,5) = dt; % y位置受y速度影响
F(3,6) = dt; % z位置受z速度影响
% 过程噪声协方差矩阵 Q
% 假设过程噪声为离散白噪声加速度模型
q = 0.5; % 噪声强度系数
% 构建 6x6 的 Q 矩阵,包含位置和速度分量的噪声耦合
Q = q^2 * [dt^4/4 0 0 dt^3/2 0 0 ;
0 dt^4/4 0 0 dt^3/2 0 ;
0 0 dt^4/4 0 0 dt^3/2;
dt^3/2 0 0 dt^2 0 0 ;
0 dt^3/2 0 0 dt^2 0 ;
0 0 dt^3/2 0 0 dt^2 ];
% 量测噪声协方差矩阵 R完整代码与函数,包运行成功:
https://download.csdn.net/download/callmeup/92789708
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者