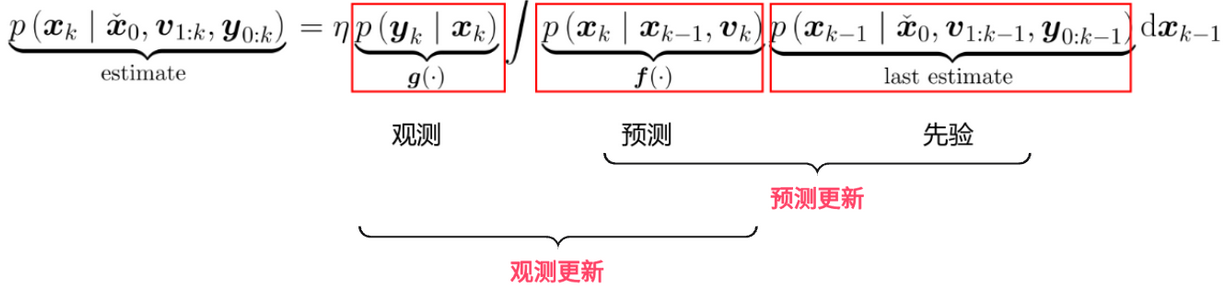
「贝叶斯滤波用似然 × 先验求最大后验(MAP)」,和「卡尔曼滤波用联合高斯分布求条件后验」,不是两种不同的估计思路,而是线性高斯假设下,同一个贝叶斯推断的两种等价实现方式。
贝叶斯滤波在理论上非常完美(融合了全概率公式与贝叶斯推断),但它是一个包含了无穷积分的连续函数表达。在实际工程和计算机中,我们不可能遍历连续空间去硬算积分(维度灾难)。
卡尔曼滤波没有推翻贝叶斯框架,而是给贝叶斯滤波加了两个极强的、但在工程中可近似满足的约束,直接解决了上面的 "无解困境":
**1.线性系统假设:**运动方程和观测方程都是线性的
2.全链路高斯假设:初始状态、过程噪声、观测噪声,全部服从零均值高斯分布
这两个假设带来了一个颠覆性的数学特权 :高斯分布在线性变换下是闭合的。只要初始状态是高斯的,经过线性运动方程传播的先验分布、观测方程对应的似然分布、最终的后验分布,全都是高斯分布。
而一个高斯分布,完全由它的均值μ 和协方差矩阵Σ两个量决定 ------ 我们不需要求解整个复杂的概率密度函数,只需要递推这两个矩阵,就能完全确定后验分布。
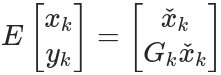
此时便可以用联合高斯分布求条件分布。利用联合高斯分布的核心性质:若两个随机变量x和y服从联合高斯分布,则它们的条件分布p(x∣y)仍然是高斯分布,且可以通过联合协方差矩阵的舒尔补,直接写出闭式解,无需任何配方。
步骤1:构造
和
因为**
- 联合均值:
- 联合协方差矩阵:
步骤 2:直接套用联合高斯条件分布的闭式解
步骤 3:代入参数,直接得到结果
- 后验均值:
其中
就是卡尔曼增益
- 后验协方差:
最终总结:
- 贝叶斯滤波是通用底层框架:它的核心是贝叶斯公式,目标是求解后验分布,适用于所有系统,但通用场景下没有闭式解,只能近似求解或求点估计。
- 卡尔曼滤波是贝叶斯滤波在线性高斯场景下的 "最优闭式实现":它没有抛弃贝叶斯框架,而是通过线性 + 高斯的假设,让后验分布有了闭式解。
- 两种方法的等价性:用联合高斯求条件分布,本质是贝叶斯公式在高斯场景下的 "数学捷径"------ 它避开了繁琐的指数配方,直接用已经证明的舒尔补结论,得到了和贝叶斯公式硬算完全相同的结果。
贝叶斯滤波与卡尔曼滤波
加油JIAX2026-04-09 10:24









相关推荐
hai31524754312 小时前
视觉概率论:从变曲率螺旋到量子统计的认知】维克兜率天1 天前
【维克】大数定律与中心极限定理:为什么长期均值终将回归?维克兜率天3 天前
【维克】从随机到有序:随机过程在金融模型中的应用weixin_377634845 天前
【多模型预测】 如何合理融合多个预测分值知识分享小能手6 天前
统计学学习教程,从入门到精通,参数估计 — 知识点详解与公式推导(10)维克兜率天8 天前
【维克】概率论入门:从“抛硬币“到理解金融市场的不确定性luoganttcc9 天前
指数分布的完整推导酸梅果茶11 天前
【7】lightning_lm项目-LIO 前端 -IVox 局部地图a11177612 天前
机器人导航入门指南(从 0 到 1)酸梅果茶12 天前
【6】lightning_lm项目-LIO 前端 -点云预处理模块