导读:
---------------------------------------------------------------------------------------------------------------------------------
在多模态工业异常检测中,Memory Bank方法长期占据主流地位,但它们需要存储大量正常样本特征,导致内存占用高、推理速度慢。有没有可能不用Memory Bank,也能达到同等甚至更好的检测精度?
CMDR-IAD给出了肯定的答案。这一框架通过跨模态映射建模2D纹理与3D几何之间的一致性关系,同时用双分支重建分别捕捉正常的纹理模式和几何结构,再经由可靠性感知融合将两路异常信号整合。在MVTec 3D-AD基准上,CMDR-IAD以97.3% I-AUROC和97.6% AUPRO@30%达到当前最优,推理速度3.7 FPS,且完全不依赖Memory Bank。
论文信息
---------------------------------------------------------------------------------------------------------------------------------
标题:Cross-Modal Mapping and Dual-Branch Reconstruction for 2D-3D Multimodal Industrial Anomaly Detection
作者:Radia Daci, Vito Reno, Cosimo Patruno, Angelo Cardellicchio, Abdelmalik Taleb-Ahmed, Marco Leo, Cosimo Distante
机构:CNR-ISASI(意大利国家研究委员会 应用科学与智能系统研究所)、CNR-STIIMA(意大利国家研究委员会 先进制造工业技术研究所)、IEMN(法国微电子与纳米技术研究所,隶属法国上法兰西理工大学/里尔大学/CNRS)
一、3D异常检测为什么需要跨模态?
---------------------------------------------------------------------------------------------------------------------------------
工业异常检测中,单纯依赖2D RGB图像面临明显的局限:光照变化、镜面反射和传感器噪声都会干扰纹理信息的可靠性,而许多缺陷的表现形式是微妙的几何偏差,而非明显的颜色或纹理变化。因此,将2D纹理信息与3D几何信息结合成为提升检测鲁棒性的自然选择------纹理擅长捕捉表面颜色和图案异常,几何擅长捕捉形变、凹陷等结构性缺陷,两者互补。
然而,现有多模态方法存在三类问题:
Memory Bank方法(如BTF、M3DM):需要在训练时存储大量正常样本的特征向量,测试时逐一比对。这带来高内存占用和慢推理速度。
Teacher-Student方法(如AST):间接处理3D信息,未充分利用几何结构。
固定融合方案:对噪声深度数据、弱纹理区域或缺失模态不够鲁棒,容易在数据质量不佳时产生误判。
CMDR-IAD的核心思路是:不存储任何训练样本特征,而是将正常模式编码进网络参数中。通过跨模态映射学习2D与3D特征之间的对应关系,通过双分支重建分别学习正常纹理和正常几何的分布,测试时直接前向传播即可完成异常检测。
二、跨模态映射+双分支重建架构
---------------------------------------------------------------------------------------------------------------------------------
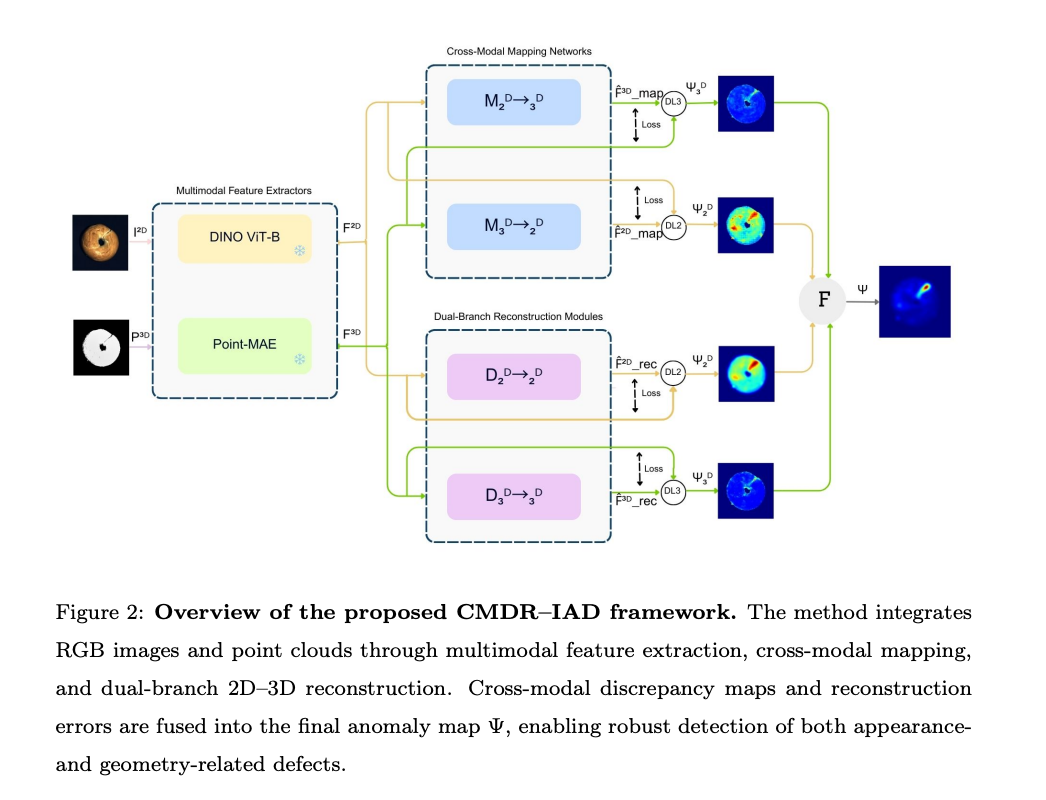
CMDR-IAD由四个核心组件组成,下面逐一说明。
2.1 多模态特征提取
2D分支采用冻结的DINO ViT-B/8(在ImageNet上预训练),将RGB图像编码为密集像素对齐的特征图,经双线性上采样后得到分辨率为224×224的特征表示F^{2D}。
3D分支采用冻结的Point-MAE(在ShapeNet上预训练),将输入点云编码为稀疏几何特征token,经插值扩展到所有点后,再通过3×3通道级2D平均池化进行空间平滑,最终通过自适应平均池化对齐到同样的224×224空间网格。
两个编码器在训练过程中完全冻结,只有后续模块的参数需要学习,这使得可训练参数量保持在较小规模。
2.2 双向跨模态映射
两个轻量级MLP分别执行双向映射:
M_{2D→3D}:从2D特征预测对应位置的3D特征
M_{3D→2D}:从3D特征预测对应位置的2D特征
每个MLP的结构为:输入投影 → 非线性变换块(GELU + LayerNorm) → 输出投影。映射在逐像素位置上独立执行。对于缺失深度数据的位置(如遮挡或传感器盲区),映射特征直接设为零,避免引入无效监督信号。
这种设计的直觉是:在正常样本上,2D纹理与3D几何之间存在稳定的对应关系(比如,某种表面纹理通常对应特定的几何形状)。当出现异常时,这种对应关系被打破,映射预测与实际特征之间的差异就是异常信号。
2.3 双分支重建模块
2D重建分支:线性投影 → Sparse-Attention块(QKV线性层 → Attention → 投影) → LayerNorm → MLP Block(残差连接) → reshape为空间网格 → ConvTranspose2D层完成上采样重建。
3D重建分支:投影层 → ConvTranspose1D层序列逐步上采样到原始分辨率 → 轻量级通道注意力模块(AvgPool → Conv1D → ReLU → Conv1D → Sigmoid)作为残差通路。
两个分支各自独立训练,使用Masked Similarity Loss(基于余弦相似度),仅在有有效3D特征的像素上计算。四个损失函数(2D/3D映射损失 + 2D/3D重建损失)各自只更新对应模块,不共享梯度。
2.4 可靠性感知融合
异常评分的融合分为两个层面:
Reliability-Gated Mapping Anomaly(可靠性门控映射异常):将2D映射差异和3D映射差异相乘(乘法操作强调双模态一致的异常区域),再通过从局部统计量导出的空间可靠性系数α进行门控,抑制不可靠区域的噪声。
Confidence-Weighted Reconstruction Anomaly(置信度加权重建异常):2D和3D的重建差异各自乘以一个与重建误差负相关的置信度权重(温度参数β=0.3),然后加权平均。重建误差越小的模态,置信度越高,在融合中占更大权重。
最终异常图 = 映射异常 × 重建异常,再经box filter空间平滑。图像级评分取异常图的最大值除以有效区域均值的平方根。
三、MVTec 3D-AD实验:97.3% I-AUROC
---------------------------------------------------------------------------------------------------------------------------------
实验设置
数据集:MVTec 3D-AD,包含10个工业物体类别,2656个训练样本(仅正常)+ 1197个测试样本(正常+缺陷)
训练配置:每个类别独立训练,Adam优化器,学习率10^{-3},batch size=1,50个epoch
硬件:NVIDIA A100 GPU
主实验结果
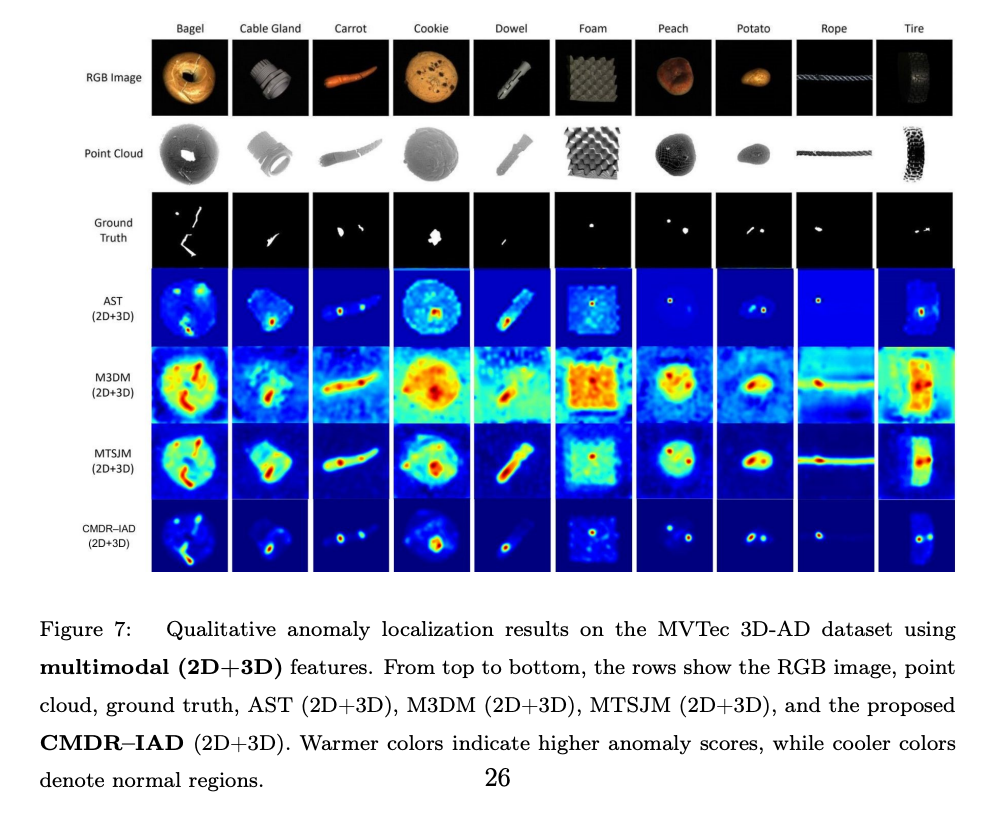
下表展示了2D+3D多模态设置下的I-AUROC结果,CMDR-IAD与16种对比方法的逐类别对比:
| 方法 | Bagel | Cable Gland | Carrot | Cookie | Dowel | Foam | Peach | Potato | Rope | Tire | Mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| M3DM (2023) | 99.4 | 90.9 | 97.2 | 97.6 | 96.0 | 94.2 | 97.3 | 89.9 | 97.2 | 85.0 | 94.5 |
| CFM (2024) | 99.4 | 88.8 | 98.4 | 99.3 | 98.0 | 88.8 | 94.1 | 94.3 | 98.0 | 95.3 | 95.4 |
| MTSJM (2025) | 100.0 | 93.1 | 98.5 | 99.4 | 96.8 | 89.9 | 98.6 | 94.7 | 96.2 | 89.7 | 95.7 |
| 3D-ADNAS (2025) | 99.7 | 100.0 | 97.1 | 98.6 | 96.6 | 94.8 | 89.7 | 87.3 | 100.0 | 86.7 | 95.1 |
| CMDR-IAD | 99.6 | 93.0 | 98.6 | 99.8 | 99.1 | 93.6 | 99.6 | 93.1 | 95.7 | 97.5 | 97.3 |
几个值得关注的数据点:
Mean I-AUROC 97.3%,超越第二名MTSJM的95.7%(+1.6%)
CMDR-IAD在10个类别中5个取得最高I-AUROC(Carrot 98.6%、Cookie 99.8%、Dowel 99.1%、Peach 99.6%、Tire 97.5%)
CMDR-IAD是唯一所有类别I-AUROC均超过93%的方法(范围93.0%--99.8%),其他方法都存在个别类别的明显短板
在像素级定位指标上,CMDR-IAD同样表现优异。在像素级定位指标上,2D+3D设置的AUPRO@30% Mean达到97.6%,所有类别均超过95.5%(范围95.9%--98.2%)。在更严格的AUPRO@1%指标上,CMDR-IAD取得**46.5%**Mean,10个类别中8个最高。
推理效率对比
下表综合对比了推理速度、内存占用和检测性能:
| 方法 | 帧率 (FPS) | 内存 (MB) | I-AUROC | P-AUROC | AUPRO@30% | AUPRO@1% |
|---|---|---|---|---|---|---|
| CFM (CVPR 2024) | 3.331 | 1957.77 | 95.4 | 99.2 | 97.1 | 45.5 |
| CMDR-IAD | 3.710 | 2797.65 | 97.3 | 99.6 | 97.6 | 46.5 |
CMDR-IAD的推理帧率为3.710 FPS,高于CFM的3.331 FPS(+0.379 FPS)。内存占用2797.65 MB高于CFM的1957.77 MB(+839.88 MB),但关键在于CMDR-IAD完全不使用Memory Bank------这意味着其内存占用不会随训练数据量增加而膨胀,而Memory Bank方法的内存会持续增长。
在所有性能指标上,CMDR-IAD均为最高:I-AUROC 97.3%(+1.9%)、P-AUROC 99.6%(+0.4%)、AUPRO@30% 97.6%(+0.5%)、AUPRO@1% 46.5%(+1.0%)。
聚氨酯数据集:3D-only验证
论文还在一个来自MOROSAI项目的真实聚氨酯切割数据集上验证了3D-only模式(该数据集仅有3D点云,无RGB图像):
| 指标 | 帧率 (FPS) | 内存 (MB) | I-AUROC | P-AUROC |
|---|---|---|---|---|
| CMDR-IAD (3D-only) | 24.63 | 465.68 | 92.6% | 92.5% |
3D-only模式的推理速度达到24.63 FPS,内存仅465.68 MB,说明框架在单模态场景下依然保持良好的性能和效率。
四、消融实验:映射和重建各贡献多少?
---------------------------------------------------------------------------------------------------------------------------------
跨模态映射 vs 双分支重建
下表对比了单独使用重建或映射、以及两者结合的效果:
| 配置 | I-AUROC | P-AUROC | AUPRO@30% | AUPRO@1% |
|---|---|---|---|---|
| 仅双分支重建 | 95.0 | 98.6 | 95.2 | 41.0 |
| 仅跨模态映射 | 95.4 | 99.4 | 97.4 | 46.0 |
| CMDR-IAD(两者结合) | 97.3 | 99.6 | 97.6 | 46.5 |
单独使用任一组件已经能获得较强的性能(I-AUROC均在95%以上),但两者结合后I-AUROC从95.0%/95.4%提升到97.3%(+2.3%/+1.9%)。值得注意的是,跨模态映射单独使用时在像素级定位指标上表现更突出(AUPRO@30% 97.4% vs 重建的95.2%,差距+2.2%),说明映射组件对精确定位的贡献更大。而两者结合后,I-AUROC的提升幅度最为显著,说明重建组件主要贡献于图像级检测的准确性。
融合策略消融
下表对比了7种不同的融合策略:
| 融合变体 | I-AUROC | P-AUROC | AUPRO@30% | AUPRO@1% |
|---|---|---|---|---|
| Case 1: 门控映射融合 | 96.7 | 99.5 | 97.4 | 46.3 |
| Case 2: 纯乘法融合 | 97.1 | 99.5 | 97.6 | 46.4 |
| Case 3: 软自适应融合 | 96.7 | 99.2 | 96.8 | 45.0 |
| Case 4: Softmax映射+门控重建 | 96.6 | 99.5 | 97.4 | 46.1 |
| Case 5: 双门控融合 | 97.0 | 99.6 | 97.7 | 46.5 |
| Case 6: 均匀平均 | 95.0 | 98.7 | 95.7 | 42.5 |
| CMDR-IAD(Reliability-Gated + Confidence-Weighted) | 97.3 | 99.6 | 97.6 | 46.5 |
这组消融有几个清晰的结论:
均匀平均(Case 6)是最差的选择:I-AUROC仅95.0%,比CMDR-IAD低2.3%,AUPRO@1%仅42.5%(-4.0%),说明简单平均无法处理不同模态信号的可靠性差异。
无可靠性门控的软融合(Case 3)也表现不佳:AUPRO@30%仅96.8%,比CMDR-IAD低0.8%,说明不加门控的自适应权重容易被噪声模态误导。
包含可靠性门控的变体(Cases 1, 4, 5)一致性更好:都在96.6%--97.0% I-AUROC范围内,验证了可靠性门控机制的有效性。
CMDR-IAD的融合方案在综合指标上最优,虽然Case 5在AUPRO@30%上略高0.1%,但CMDR-IAD在I-AUROC上高出0.3%,整体表现最均衡。
五、总结与思考
CMDR-IAD用跨模态映射+双分支重建替代Memory Bank,在MVTec 3D-AD上以97.3% I-AUROC和97.6% AUPRO@30%达到当前最优,推理速度3.710 FPS。
消融实验中有两个值得注意的发现:
- 一是跨模态映射单独使用时AUPRO@30%已达97.4%,接近完整模型的97.6%,说明显式建模2D-3D对应关系对像素级定位贡献很大;
- 二是融合策略的设计带来了2.3%的I-AUROC提升(均匀平均 vs 可靠性门控),在3D传感器数据存在噪声和缺失的工业场景中,这种区分可靠区域与不可靠区域的机制是必要的。
内存方面,CMDR-IAD的2797.65 MB并不算低,但它是固定的------不随训练数据量增长,这是相对Memory Bank方法在产线部署时的实际优势。
局限性在于:框架依赖对齐的RGB-3D数据,2D-only设置下I-AUROC为87.5%(低于3D-ADNAS的92.0%),优势集中体现在多模态协同上。