****论文题目:****Large model for fault diagnosis of industrial equipment based on a knowledge graph construction(基于知识图谱构建的大型工业设备故障诊断模型)
****期刊:****Applied Soft Computing
****摘要:****为了解决多模态数据的显著异质性和工业设备故障语义捕获的挑战,提出了一种将时频知识图谱与大型模型DeepSeek-V3相结合的故障诊断框架。具体而言,设计了一种基于多模态振动数据信号的无监督知识图谱构建方法。该方法利用动态时间扭曲挖掘时间演化关系,并通过互信息量化特征与故障之间的相关性,从而形成动态图表示。此外,DeepSeek-V3对振动特征的自然语言描述进行编码,整合图结构和时频图特征,实现文本、图、图之间的协同推理和诊断。实验结果表明,该方法具有较高的准确率,显著优于基准模型,优于传统方法。该框架通过数据驱动知识图和大模型语义理解的深度融合,具有高精度、强鲁棒性和透明的决策能力,为工业设备的智能诊断提供了新的见解。
当知识图谱遇上大模型:面向工业设备的高精度故障诊断新范式
1. 背景:工业故障诊断为何如此棘手?
随着现代工业设备的日益复杂,故障诊断已经成为保障设备安全运行、降低维护成本的核心手段。现代工业系统配备了大量多源传感器,能够采集海量多模态数据,这为数据驱动的智能诊断提供了基础。然而,这条路并不好走,原因主要有三:
第一,多模态数据天然异构。 振动信号、时频图、设备日志等数据来自不同的"语言体系",直接拼接或独立处理会丢失跨模态的互补信息,导致特征空间对齐困难。
第二,故障语义关系难以建模。 故障演化过程涉及多物理场耦合,故障模式与监测特征之间的因果关系难以被显式刻画。传统知识图谱需要依靠领域专家手工定义关系,灵活性差、难以适应动态变化的监测数据。
第三,大模型对工业场景"水土不服"。 大模型固有的文本生成范式与工业多模态数据之间存在语义鸿沟,且现有方法依赖大量有标签样本进行监督微调,在稀疏故障样本场景下泛化能力有限,诊断结果可解释性也不足。
正是为了系统性地解决以上三个问题,本文提出了一套将时频知识图谱 与大模型 DeepSeek-V3 深度融合的多模态故障诊断框架。
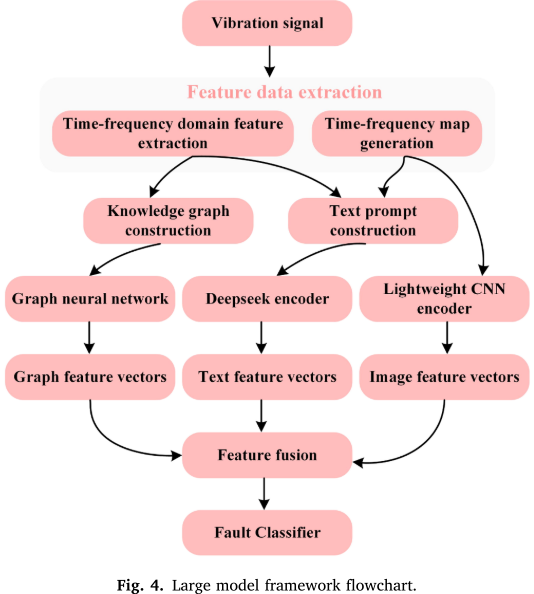
2. 方法总览:三位一体的融合架构
本文方法的核心逻辑可以用一句话概括:用知识图谱结构化故障语义,用大模型理解文本特征,用时频图捕捉局部冲击,三者通过门控注意力机制协同决策。
整个框架由三个核心模块构成:知识图谱构建模块、图动态更新模块、大模型融合框架。
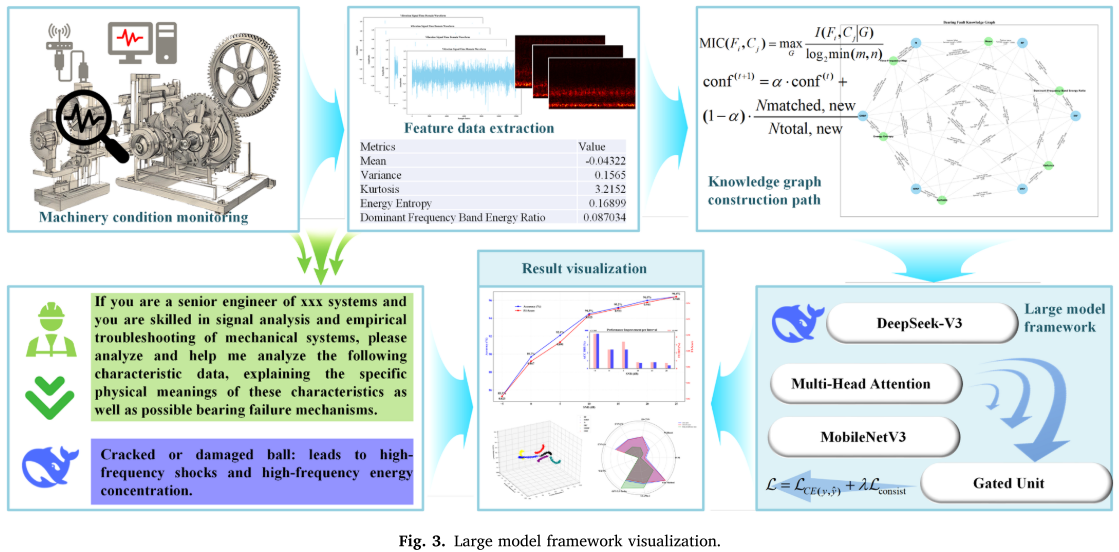
【Fig. 3 大模型框架可视化图(Large model framework visualization)】
【Fig. 4 大模型框架流程图(Large model framework flowchart)】
3. 知识图谱构建:从振动信号到结构化语义
3.1 特征提取
首先,对振动信号 x(t) 进行固定窗口(1024个采样点)分割,提取六类时频特征:
- 时域特征 :均值
、方差
- 时频域特征 :频带能量比
- 时频图特征 :利用连续小波变换(CWT)将振动信号转化为二维时频图
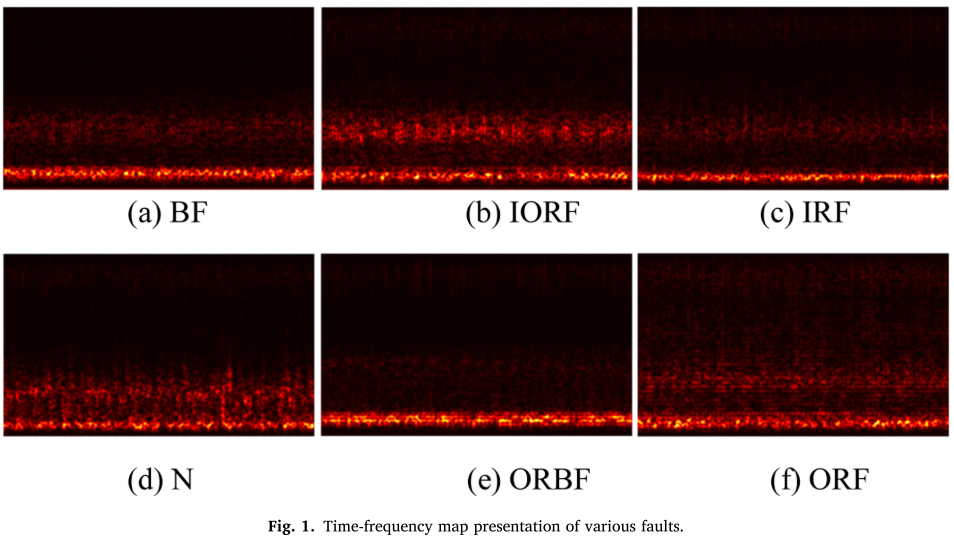
【Fig. 1 各类故障的时频图展示(Time-frequency map presentation of various faults)】
不同故障类型在时频图上呈现出明显不同的纹理特征------球故障(BF)、内圈故障(IRF)、外圈故障(ORF)、复合故障(IORF、ORBF)等均有其独特的时频"指纹",这正是时频图能够作为独立模态参与融合的底层原因。
3.2 实体与关系定义
知识图谱中包含三类实体:
| 实体类型 | 核心属性 |
|---|---|
| 特征节点 | 6类时频域特征值 + 时间戳 |
| 时频模式 | 聚类簇心特征向量 + 样本ID列表 |
| 故障类型 | 故障名称 + 故障标签 |
三类关系通过数据驱动的方式自动量化:
- 特征-故障因果关系 :用最大信息系数(MIC)衡量特征 Fi 与故障 Cj 之间的非线性相关性。当
- 时序演化关系 :用动态时间规整(DTW)衡量相邻信号片段的时序相似性。当
- 时频模式-故障关联 :统计时频模式 Pk 在故障 Cj 样本中的出现频率。当频率
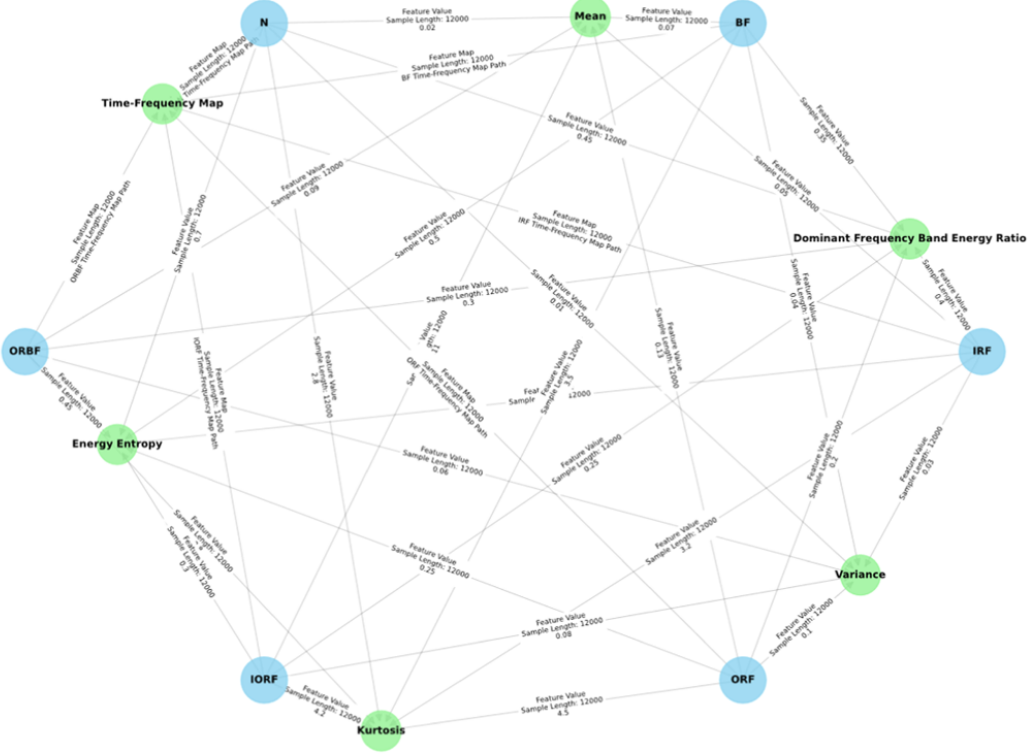
【Fig. 2 知识图谱构建路径图(Knowledge graph construction path)】
这种完全无监督的构建方式,无需任何人工标注的先验关系,极大地提升了图谱的灵活性和自适应性。
4. 动态更新:让图谱跟上设备状态的变化
工业数据具有流式特性,设备状态和故障模式会随时间演变。为此,论文设计了一套在线动态更新机制:
新时频图的处理 :对新到来的时频图 ,通过 CNN 提取特征后,计算其与各聚类中心的欧氏距离,归属至最近的簇,并以学习率
更新簇中心。若距离超过阈值
,则新建一个聚类簇。
置信度衰减与边剪枝 :当新数据导致特征 Fi 与多个故障类型产生冲突关联时,触发冲突消解机制。引入遗忘因子 对边的置信度进行指数衰减更新:
当置信度低于 0.3 时,该边被自动删除,从而抑制噪声干扰,消除图中的冗余连接。
这一机制是本文的核心创新之一------它让知识图谱不再是一个静态的先验库,而是能够随数据流持续自我修正的动态结构。
5. 大模型融合框架:三流合一的协同推理
5.1 文本流:DeepSeek-V3 的语义编码
对每个振动信号窗口,将时频域特征值转化为结构化的自然语言描述(Text Prompt),例如:
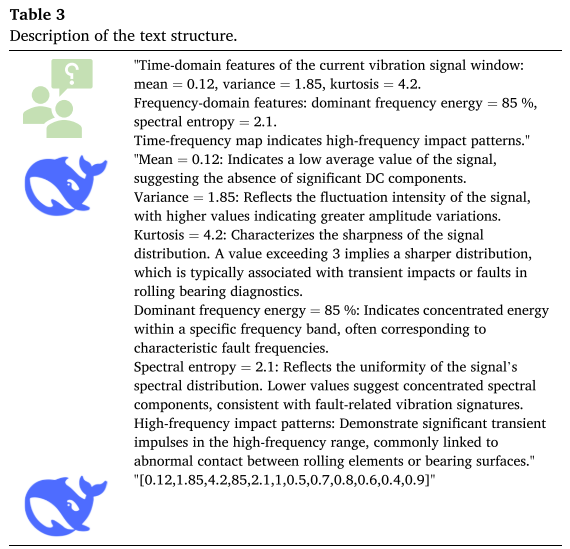
【Table 3 文本提示结构示例(Description of the text structure)】
这段文字被送入预训练的 DeepSeek-V3(130亿参数,冻结前24层,微调最后3个 Transformer 块),输出语义向量 。DeepSeek-V3 能够理解"峭度=4.2意味着什么"、"高频冲击模式对应哪类轴承故障",将物理量转化为富含诊断语义的表示。
5.2 图流:图注意力网络的结构推理
基于当前特征值和时频模式,从知识图谱中检索相关子图 (包含故障节点、特征节点和因果边)。使用4头图注意力网络(GAT)对子图进行结构编码:
全局池化后得到图结构向量 。这一流使模型能够显式地利用"特征A与故障B存在强因果关联"这类结构化知识进行推理。
5.3 图像流:MobileNetV3 的局部特征提取
采用轻量级 MobileNetV3 对时频图 提取1024维局部特征向量
,捕捉时频图中的高频冲击条纹等视觉模式。MobileNetV3 的轻量化设计保证了整体框架的推理效率。
5.4 门控融合与一致性损失
三路特征通过门控注意力单元 动态融合:以文本语义向量 为 Query,图特征和图像特征的拼接作为 Key 和 Value,计算跨模态注意力权重:
这一设计的精妙之处在于:文本语义主导融合方向,引导模型在图结构和时频图的相应区域聚焦,实现真正的语义导向融合,而非简单的特征拼接。
为了强化诊断结果的物理可信性,引入图一致性损失 ,约束模型对特征-故障关联的预测概率与知识图谱中对应边权重保持一致。总损失为:
6. 实验设置
6.1 数据集
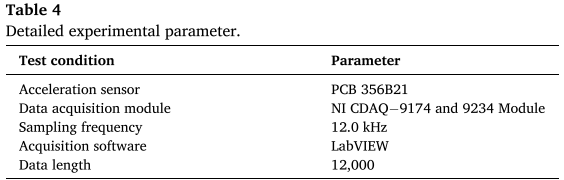
实验在 ABLT-1A 轴承退化试验台上进行,使用 6205 型滚动轴承,通过电火花加工模拟六类故障:正常(N)、内圈故障(IRF)、外圈故障(ORF)、球故障(BF)、内外圈复合故障(IORF)、外圈球复合故障(ORBF)。振动信号通过 NI-9174 采集卡以 12kHz 采样频率采集,数据长度为12000点。
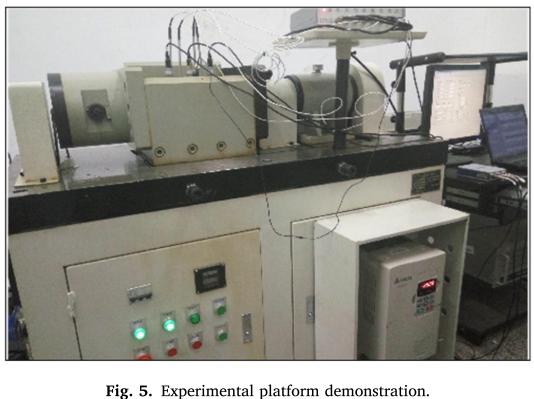
【Fig. 5 实验平台展示图(Experimental platform demonstration)】
【Table 4 详细实验参数表(Detailed experimental parameter)】
6.2 对比基线
共选取8种基线模型,覆盖传统机器学习(SVM、XGBoost)、经典深度学习(1D-CNN、CNN-FC、CNN-SA、WKNN)和大模型(GPT-3.5-Turbo、LLaMa-2)三大类别,评估指标为准确率(ACC)和 F1-score。
7. 实验结果与分析
7.1 消融一:知识图谱的贡献
将完整模型与去除知识图谱模块的变体(KG-Loss)对比,结果如下:
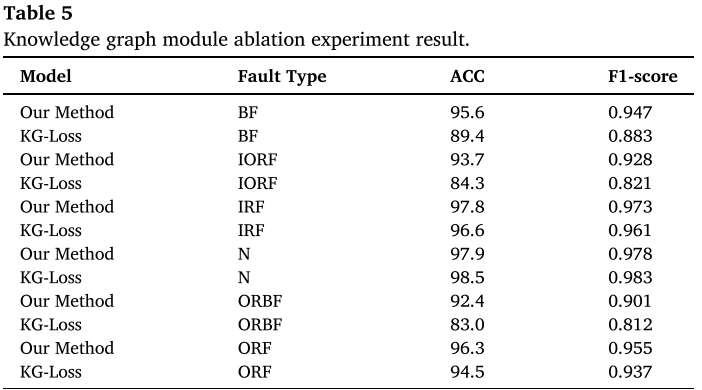
【Table 5 知识图谱模块消融实验结果】
核心发现:知识图谱对复合故障的提升最为显著------IORF 的 ACC 从 84.3% 提升至 93.7%,ORBF 的 F1-score 从 0.812 提升至 0.901。这是因为复合故障的特征组合极为复杂(如 IORF 中同时存在内外圈频率调制),知识图谱能够通过 MIC 值精准捕捉这种多特征联合模式。对于单一故障,知识图谱的边际收益较小,因为特征-故障关系本身已较为明确。
7.2 消融二:多模态融合的协同效应
分别对比仅文本(Text-only)、仅图(KG-only)、仅时频图(Map-only)与完整模型的性能:
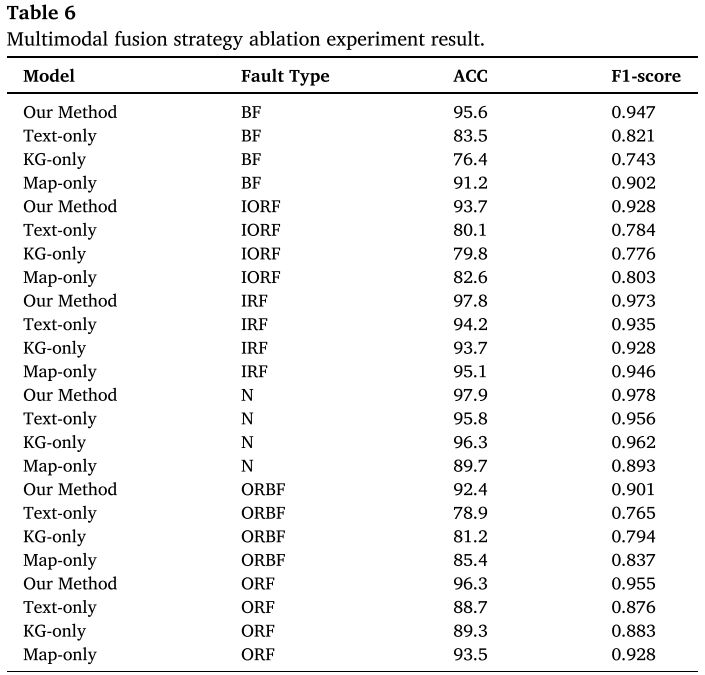
【Table 6 多模态融合策略消融实验结果】
核心发现:对于依赖局部时频特征的球故障(BF),完整模型 ACC 达 95.6%,显著优于 Map-only(91.2%)和 Text-only(83.5%)。这说明时频图中的高频共振条纹需要结合文本中的"峭度激增"和图中的"能量熵异常"才能做出准确判断。对于正常状态,仅图像模型(Map-only)表现最差(89.7%),因为时频图的均匀纹理容易与早期故障混淆,正是文本和图模态的稳态特征描述提供了关键的区分信息。
7.3 消融三:图一致性损失的作用

【Table 7 损失模块消融实验结果】
去除一致性约束后,复合故障的 F1-score 显著下降:IORF 从 0.928 降至 0.861,ORBF 从 0.901 降至 0.821。这表明一致性损失通过迫使模型聚焦于物理上有意义的特征关联,有效增强了分类决策的鲁棒性。
7.4 基准对比实验
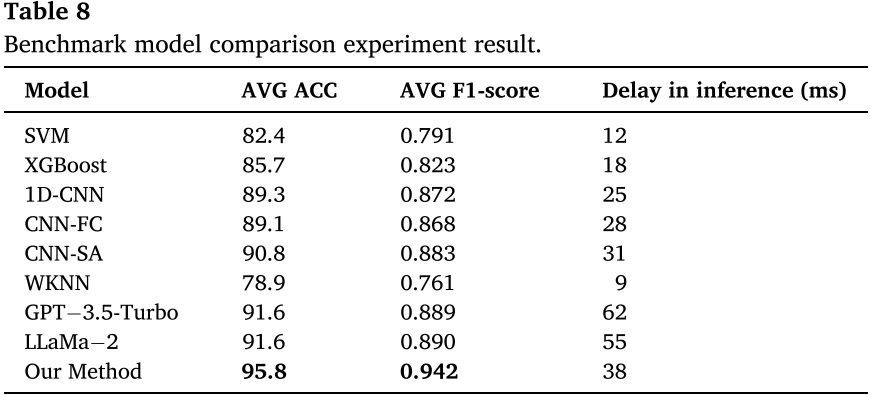
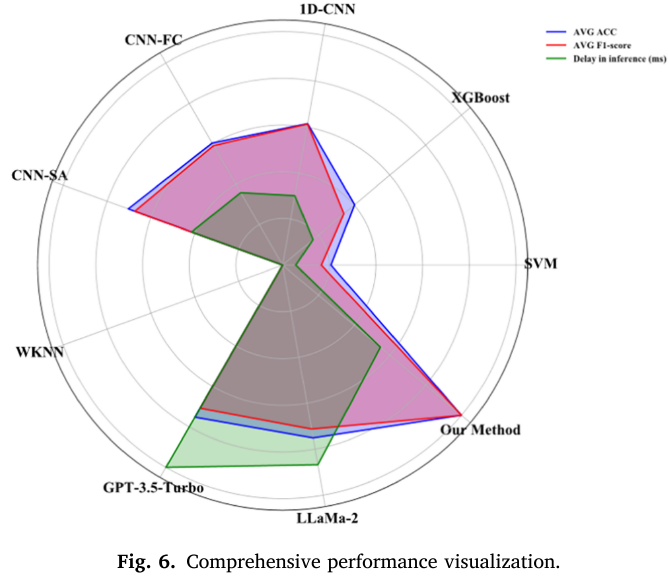
【Table 8 基准模型对比实验结果(Benchmark model comparison experiment result)】 【Fig. 6 综合性能可视化雷达图(Comprehensive performance visualization)】
结果摘要:
- 本文方法在6类故障上平均 ACC 达 95.8% ,F1-score 为 0.942。
- 相较最强基线 LLaMa-2(平均 ACC 91.6%),提升 4.2% ;F1-score 提升范围为 5.3%~18.1%。
- 推理延迟仅 38ms,低于 LLaMa-2 的 55ms,具备实际工业部署可行性。
- SVM 表现最差(ACC 82.4%),因其无法建模复杂非线性决策边界。
- GPT-3.5-Turbo 因缺乏时频局部特征融合和图结构化知识,误报率较高。
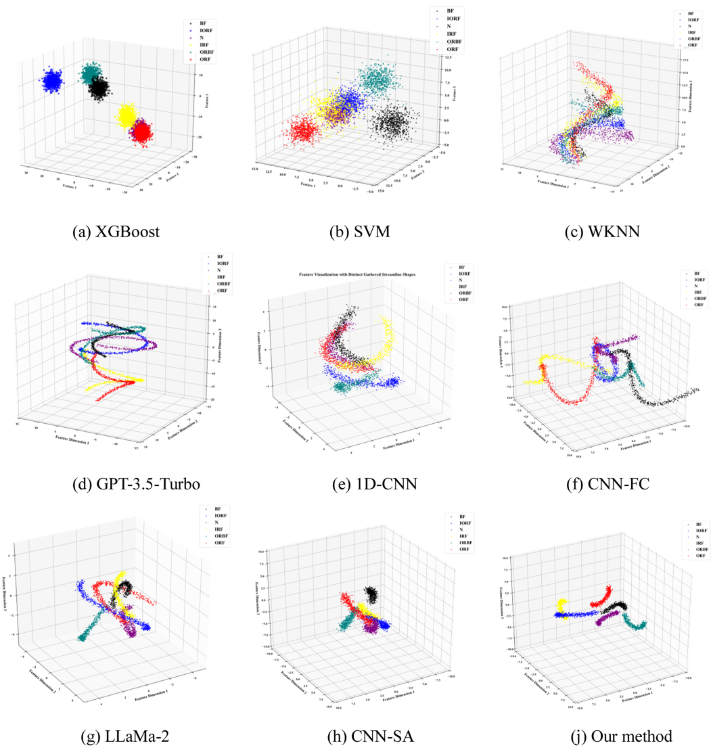
【Fig. 7 不同方法的特征空间三维可视化】
从特征空间的三维可视化来看,本文方法各故障类型的聚类边界最为清晰、紧凑,类间无重叠,而 SVM、WKNN 等方法的特征空间则呈现出明显的类间混叠现象。
8. 扩展讨论
8.1 噪声鲁棒性
在测试集振动信号中注入8种强度的高斯噪声(SNR 从 -5dB 到 25dB),测试结果表明:
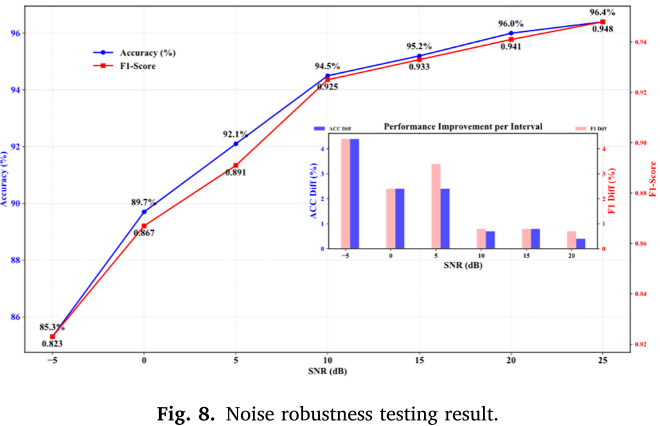
【Fig. 8 噪声鲁棒性测试结果(Noise robustness testing result)】
即使在 SNR = -5dB 的强噪声条件下,平均 ACC 仍达 85.3%。这得益于两个机制:其一,知识图谱通过动态剪枝低置信度边抑制噪声干扰;其二,门控机制能够在噪声环境下自适应地聚焦于鲁棒性更强的特征维度。在噪声环境下,正常状态容易被误判为早期故障,而图结构约束有效降低了误报率。
8.2 少样本能力
以 5%~40% 的步长随机子采样训练集,测试少样本泛化能力:
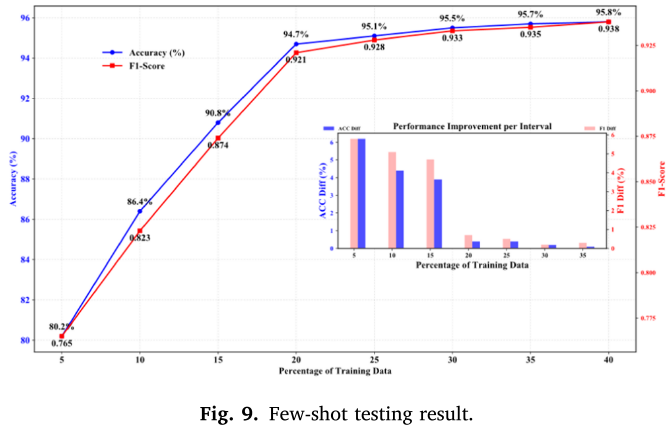
【Fig. 9 少样本测试结果】
仅使用 5% 的训练数据 时,框架仍能达到 80.2% 的平均准确率。从 5% 增至 20% 时,准确率提升高达 14.5%,这是因为知识图谱的无监督关系挖掘大幅降低了对有标注数据的依赖,动态更新机制能够将新增样本的时频模式系统地融入图结构。
8.3 跨设备泛化(SEU 齿轮箱数据集)
为验证泛化能力,将框架应用于 SEU 齿轮箱数据集(包含正常和4类齿轮故障):
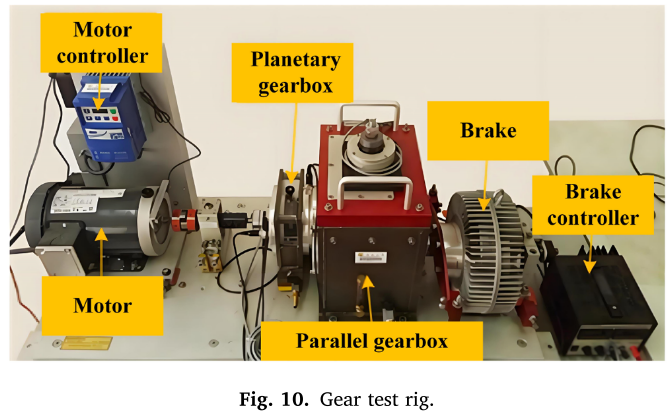
【Fig. 10 齿轮测试台(Gear test rig)】
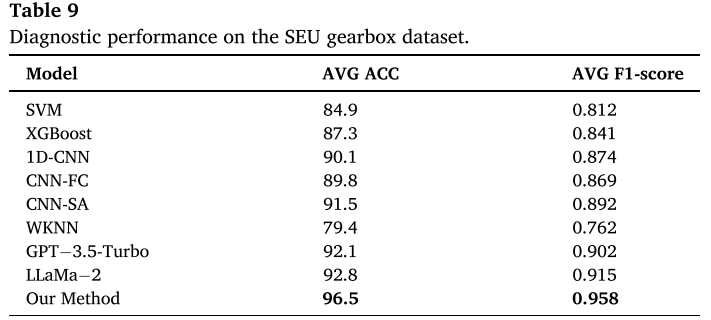
【Table 9 SEU 齿轮箱数据集诊断性能】
本文方法在 SEU 数据集上达到平均 ACC 96.5% ,F1-score 0.958 ,比最强基线 LLaMa-2 高出 3.7%,有力证明了框架的跨设备泛化能力源于其强大的模式学习与推理能力,而非对特定数据分布的过拟合。
9. 总结与展望
本文提出的框架代表了工业故障诊断领域的一种新思路:不是简单地把大模型"接入"工业数据,而是通过知识图谱为大模型提供结构化的工业语义背景,通过多模态融合让大模型"看懂"时频图,通过一致性约束让大模型的诊断决策具有物理可解释性。
三个核心优势值得关注:
- 高精度:在轴承和齿轮箱两类设备上均以显著优势超越所有基线,尤其对复合故障的识别能力突出。
- 强鲁棒性:在强噪声(SNR=-5dB)和少样本(5%训练数据)条件下均保持较高准确率。
- 可解释性:知识图谱提供了特征-故障之间的显式因果链,诊断结论有据可查。
当然,论文也坦诚了现有局限:跨域泛化 (如从轴承到完全不同类型设备的迁移)和极端工况适应性仍有待提升。未来工作可能探索跨模态对齐算法和基于对抗训练的强干扰鲁棒性提升。
对于从事预测性维护、智能运维方向的研究者和工程师而言,这套"知识图谱+大模型+多模态融合"的范式提供了一个极具参考价值的工程蓝图。