目录
1.一维时间序列线性插值
线性插值的核心思想:在两个已知点之间,用直线拟合未知点的函数值。
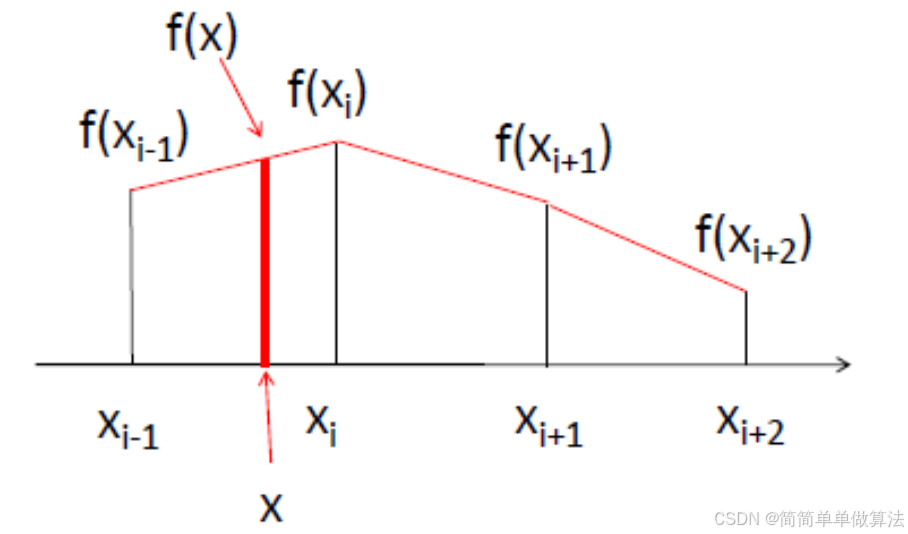
如上图所示,令y=f(x),设一维坐标轴上有两个已知点:(xi-1,yi-1)和(xi,yi),待求点x位于区间xi-1,xi 内,其对应的函数值y可以表示为。
y=yi-1+(yi-yi-1)/(xi-xi-1)*(x-xi-1)
这个部分对应的matlab程序如下:
clear; clc; close all;
%% ==================== 1. 构造已知原始点(样本点) ====================
x_known = 1:100; % 已知点x坐标
y_known = sin(2*pi*x_known/100); % 已知点y值(可任意修改)
N_known = length(x_known); % 已知点数量
%% ==================== 2. 生成需要插值的目标点 ====================
% 生成密集x坐标,用于插值(比原始点更密)
x_min = min(x_known);
x_max = max(x_known);
x_interp = linspace(x_min, x_max, 9); % 插值目标点(100个点)
N_interp = length(x_interp);
% 初始化插值结果
y_interp = zeros(1, N_interp);
%% ==================== 3. 一维线性插值核心算法(纯公式实现) ====================
for k = 1:N_interp
x = x_interp(k); % 当前待插值点
% ========== 步骤1:找到x落在哪个已知区间 x_known(i), x_known(i+1) ==========
i = 1;
while i < N_known && x > x_known(i+1)
i = i + 1;
end
% 区间两个端点
x0 = x_known(i);
y0 = y_known(i);
x1 = x_known(i+1);
y1 = y_known(i+1);
% ========== 步骤2:计算归一化插值系数 α ==========
dx = x1 - x0;
if dx == 0
alpha = 0; % 避免除零
else
alpha = (x - x0) / dx;
end
% ========== 步骤3:线性插值公式(加权形式) ==========
y = (1 - alpha) * y0 + alpha * y1;
% 保存结果
y_interp(k) = y;
end
%% ==================== 4. 结果可视化 ====================
figure('Name','一维线性插值结果');
plot(x_known, y_known, 'r', 'LineWidth', 2, 'MarkerSize', 8); % 已知点
hold on;
plot(x_interp, y_interp, 'b-o', 'LineWidth', 1.5); % 插值曲线
legend('已知离散点','一维线性插值结果','Location','best');
xlabel('X 轴');
ylabel('Y 轴');
grid on; grid minor;
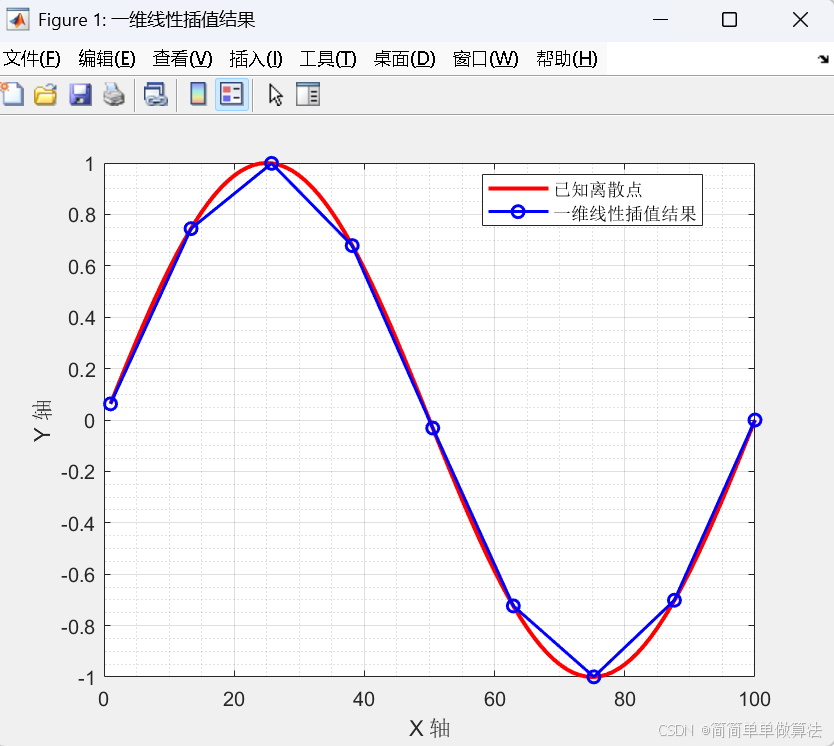
其对应的仿真结果如下图所示:
2.二维图像双线性插值
双线性插值本质:在二维平面上,分三步执行一维线性插值------ 先对行方向插值,再对列方向插值,最终得到未知点的灰度值。其原理如下图所示:
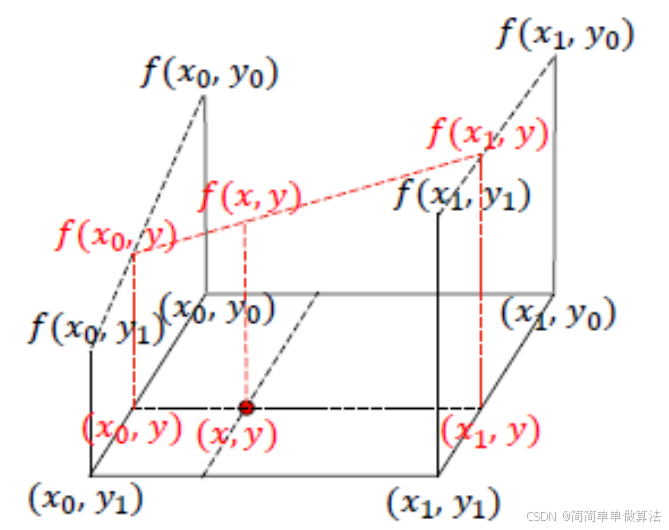
其中,(x0, y0)、(x0, y1)、(x1, y0)、(x1, y1) 均为原图像上的像素坐标点,灰度值分别对应为f(x0, y0)、f(x0, y1)、f(x1, y0)、f(x1, y1)。而灰度值未知的插值点(x, y),根据双线性插值法的约束,可以先由像素坐标点(x0, y0)和(x0, y1) 在y轴向作一维线性插值得到f(x0, y)、由像素坐标点(x1, y0)和(x1, y1)在y轴向作一维线性插值得到 f(x1, y),然后再由(x0, y)和(x1, y)在x轴向作一维线性插值得到插值点(x, y)的灰度值f(x, y)。
这个部分对应的matlab程序如下:
clear; clc; close all;
%读取图像
img = rgb2gray(imresize(imread('1.jpg'),256,256)); % 替换为你的图像路径
H, W, C = size(img); % H=高 W=宽 C=通道数
%设置目标尺寸(放大2倍)
scale = 2;
H_new = round(H * scale);
W_new = round(W * scale);
% 新建空白目标图
img_out = zeros(H_new, W_new, C, 'uint8');
%3. 双线性插值核心(逐像素计算)
for ch = 1:C
for x = 1:H_new
for y = 1:W_new
% ======================
% 反向映射:目标坐标 → 原图坐标
% ======================
u = (x - 1) * H / H_new + 1;
v = (y - 1) * W / W_new + 1;
% ======================
% 找到四个最近邻点
% ======================
i = floor(u);
j = floor(v);
i1 = i + 1;
j1 = j + 1;
% ======================
% 边界检查(防止越界)
% ======================
i = max(i, 1);
i1 = min(i1, H);
j = max(j, 1);
j1 = min(j1, W);
% ======================
% 取四个点的像素值
% ======================
f11 = double(img(i, j, ch));
f12 = double(img(i, j1, ch));
f21 = double(img(i1, j, ch));
f22 = double(img(i1, j1, ch));
% ======================
% 双线性插值公式
% ======================
a = u - i; % 垂直方向权重
b = v - j; % 水平方向权重
value = (1 - a) * (1 - b) * f11 + (1 - a) * b * f12 + a * (1 - b) * f21 + a * b * f22;
% 赋值
img_out(x, y, ch) = uint8(value);
end
end
end
imshow(img); title('原始图像');
figure;
imshow(img_out); title('双线性插值结果');
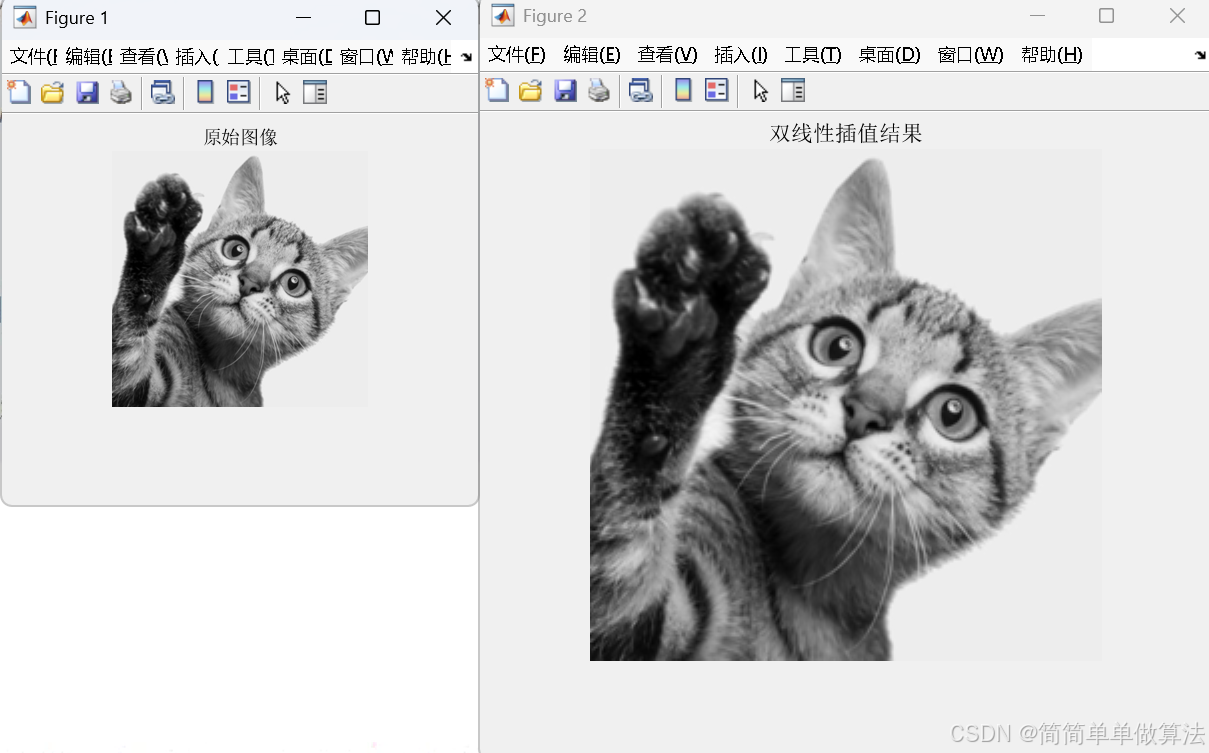
仿真结果如下图所示:
我们打开上述两个图像的变量名称,以图像中心区域为例,线性插值效果如下:
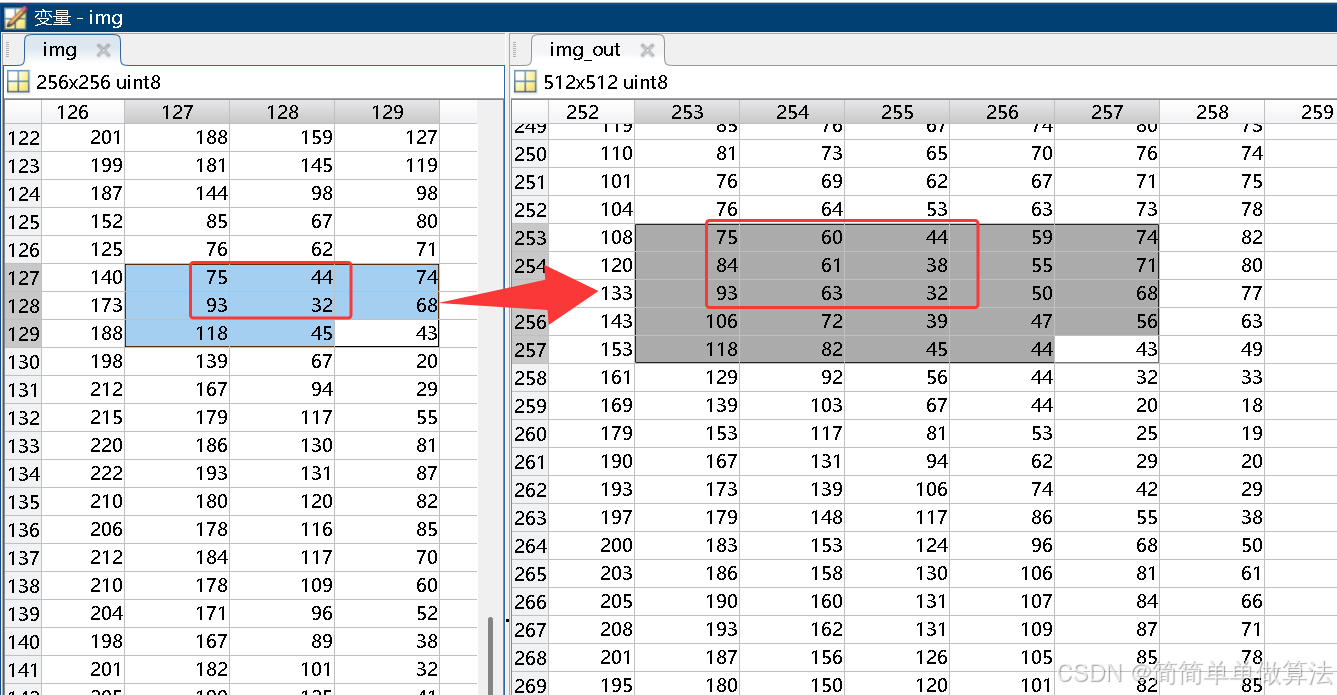
如上图所示,像素75,44之间,通过插值,多了一个60的像素值。