摘要与导言
信号处理在雷达系统中的核心地位
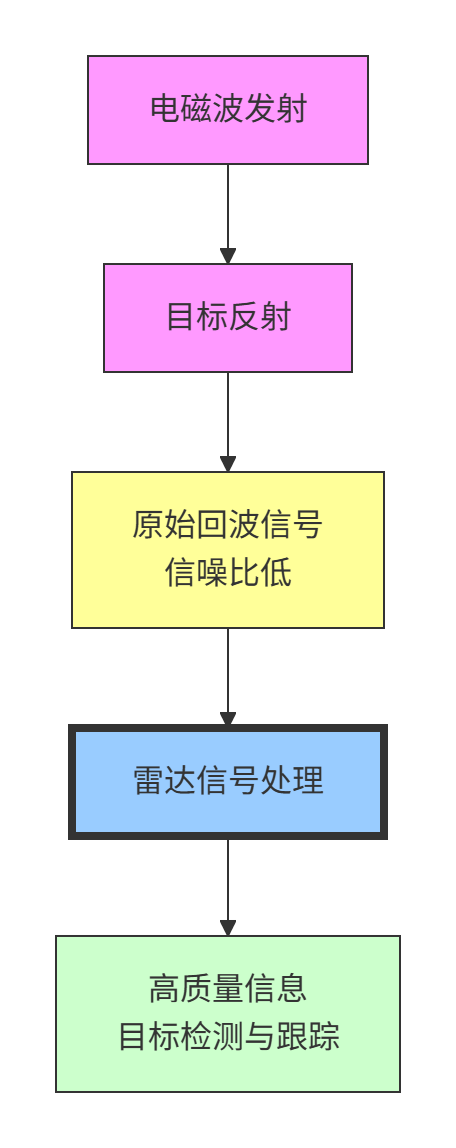
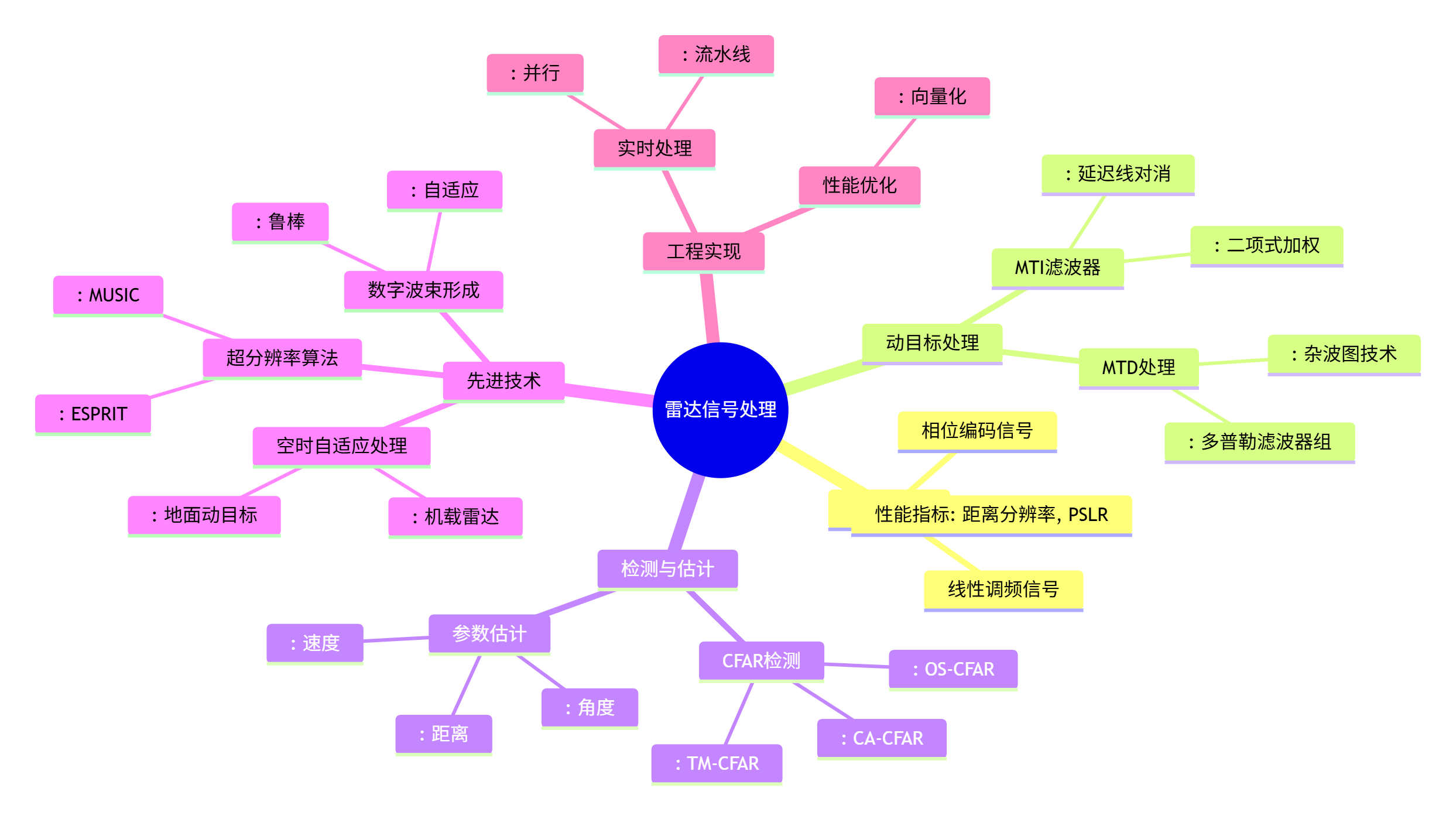
雷达信号处理是整个雷达系统的"大脑",它将微弱的、充满噪声的回波信号转化为可靠的、可理解的目标信息。信号处理算法的优劣直接决定了雷达的探测距离、分辨率、抗干扰能力和目标识别能力。
现代雷达信号处理发展趋势

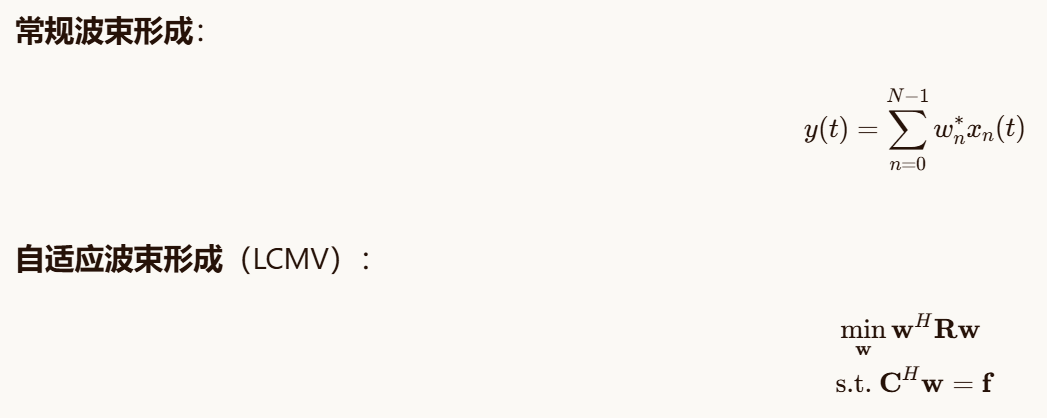
现代雷达信号处理正经历着从固定处理 到自适应处理 ,再到认知处理的革命性转变。认知雷达能够感知环境、学习特征、优化参数,实现智能化、自适应的信号处理。
本篇文章的技术路线

1. 雷达信号处理基础理论
1.1 雷达信号数学模型
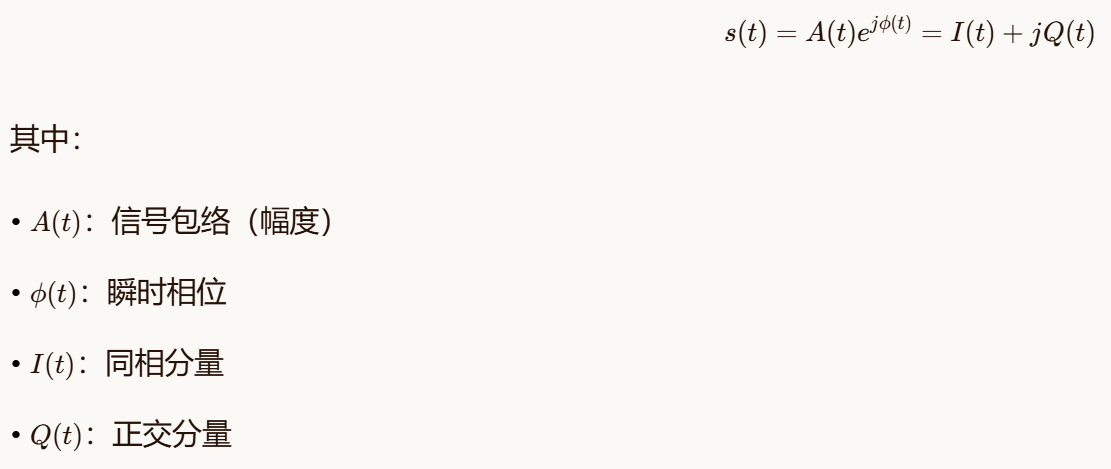
1.1.1 复信号表示
雷达信号通常采用复信号(解析信号)表示,可以同时包含幅度和相位信息:
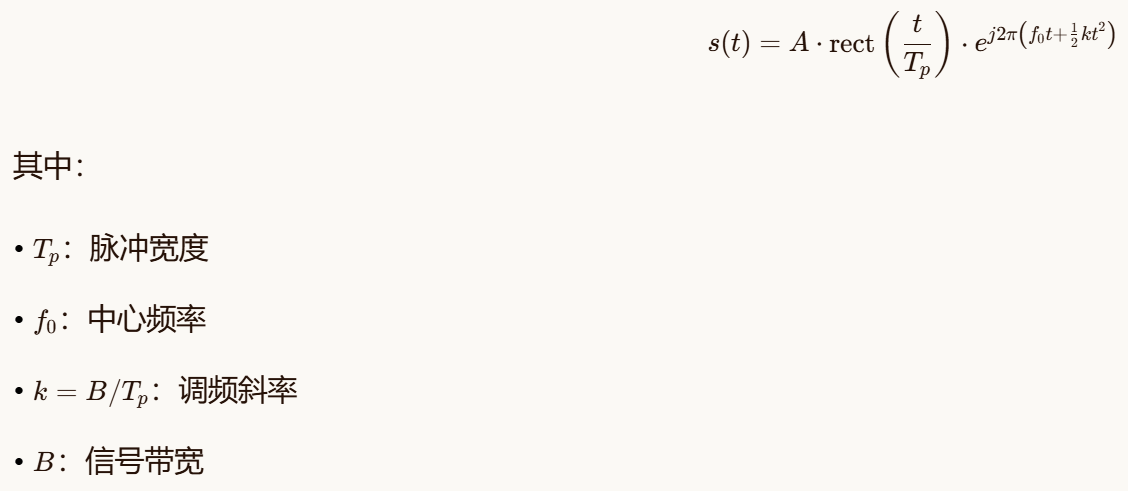
1.1.2 常用雷达信号模型
线性调频(LFM)信号数学表达式:
相位编码信号:
1.2 信号采样与量化
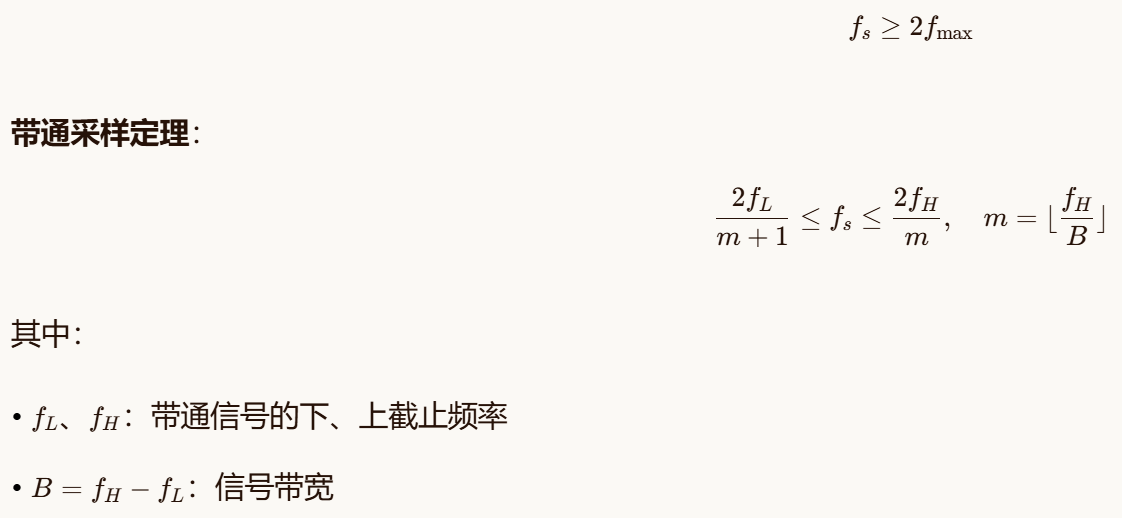
1.2.1 采样定理
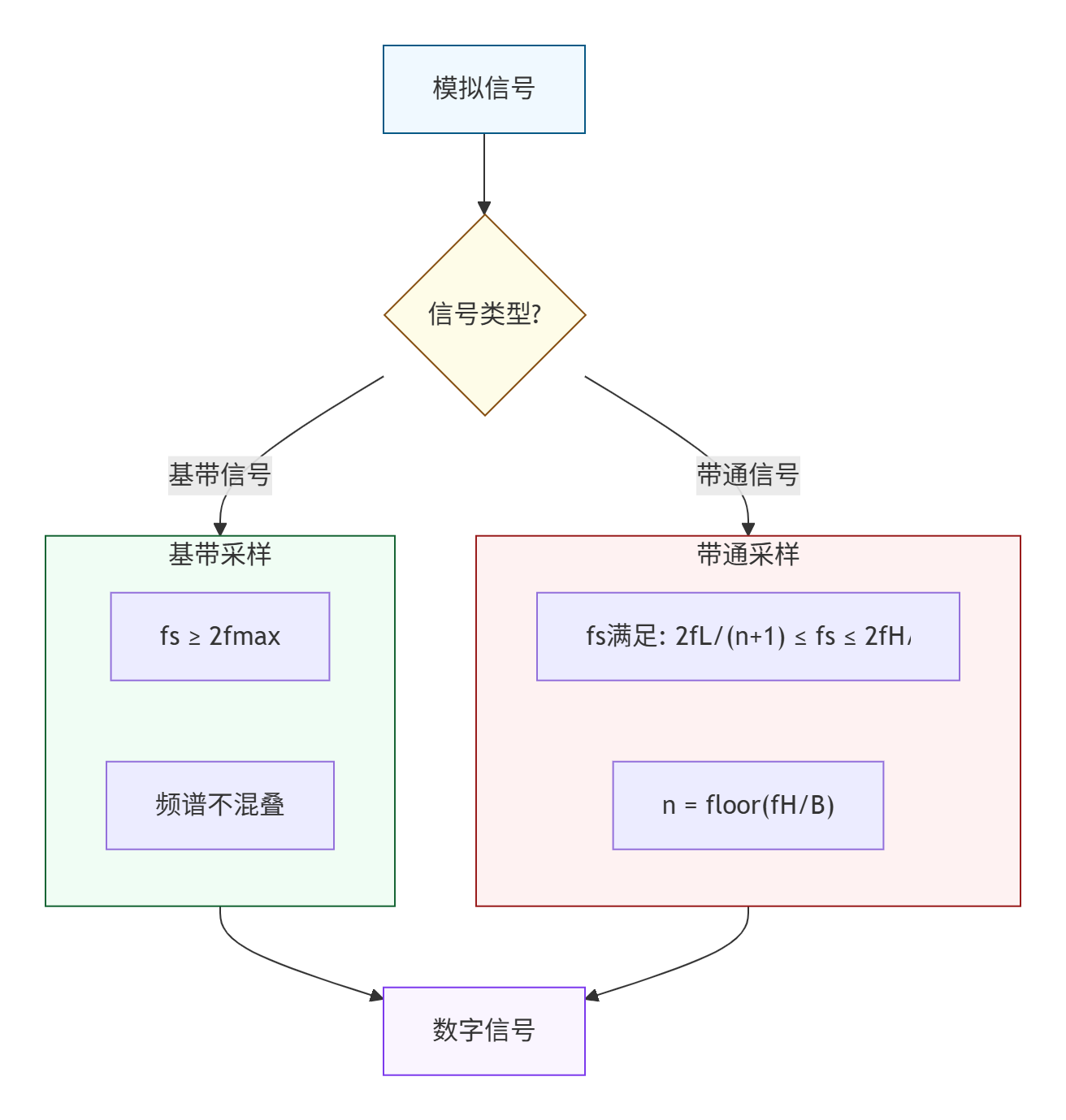
基带采样定理:
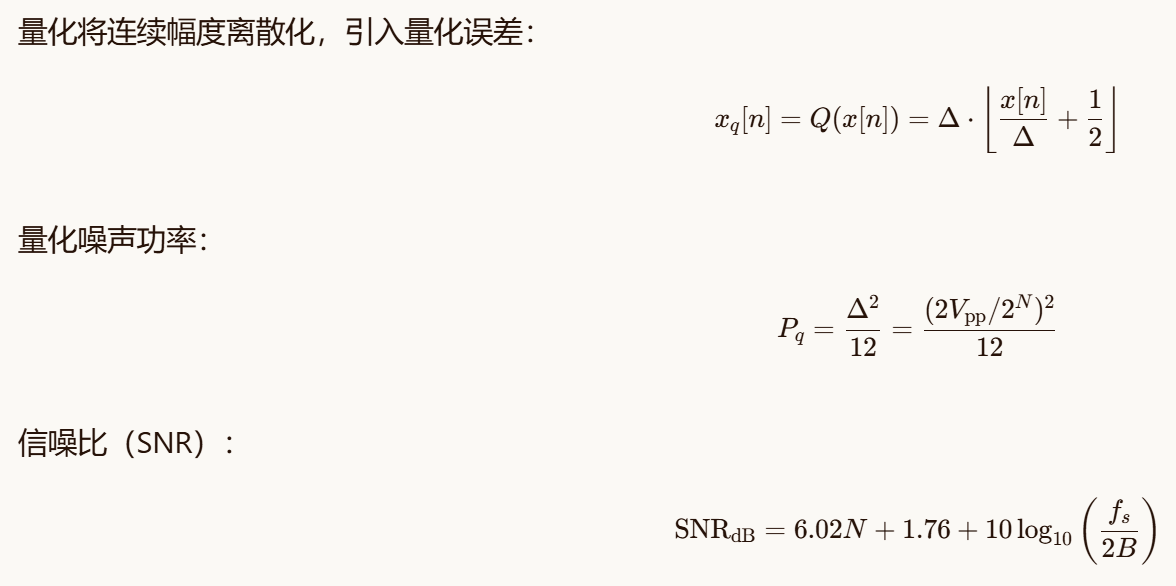
1.2.2 量化与ADC建模
量化将连续幅度离散化,引入量化误差:
1.3 雷达信号处理链概述
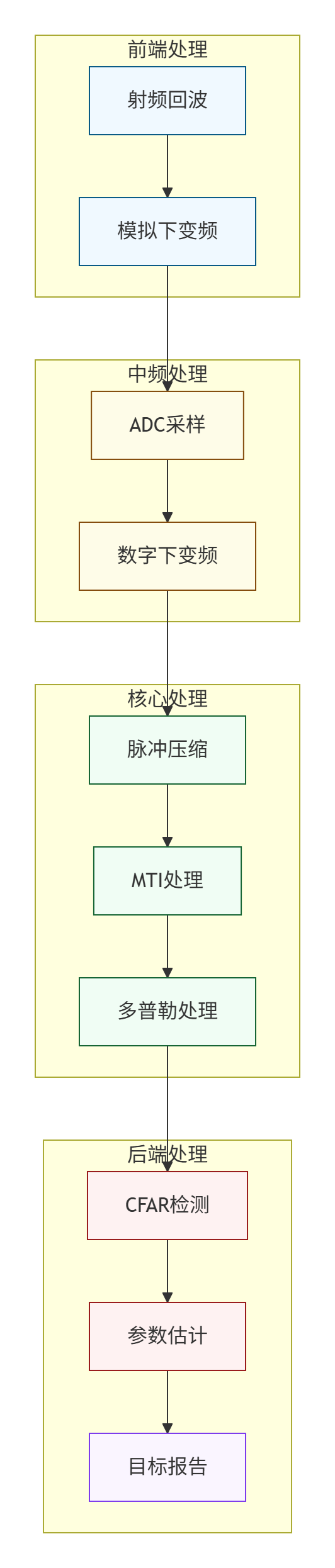
1.3.1 处理链性能指标
| 处理阶段 | 主要功能 | 性能指标 | 典型值 |
|---|---|---|---|
| 脉冲压缩 | 提高距离分辨率 | 距离分辨率、PSLR、ISLR | 1-10m、-30dB、-20dB |
| MTI处理 | 抑制静止杂波 | 改善因子、杂波衰减 | 20-40dB |
| 多普勒处理 | 测速与动目标检测 | 速度分辨率、多普勒盲区 | 0.5-5m/s |
| CFAR检测 | 恒虚警率检测 | Pd、Pfa、检测损失 | 0.9、10⁻⁶、1-3dB |
2. 脉冲压缩技术
2.1 线性调频信号脉冲压缩
2.1.1 匹配滤波器原理
匹配滤波器是使输出信噪比最大的最优线性滤波器,其冲激响应为:
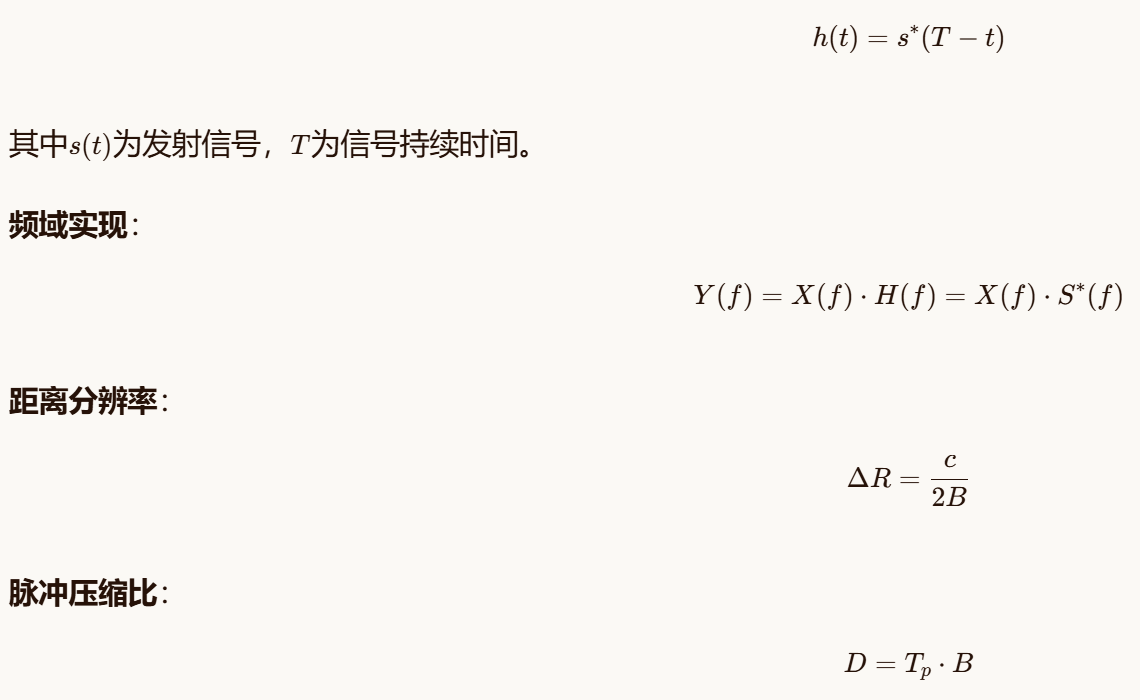

2.1.2 加窗处理
为降低旁瓣电平,通常在频域或时域加窗:
常用窗函数比较:
| 窗函数 | 主瓣宽度 | 峰值旁瓣比(dB) | 旁瓣衰减率(dB/oct) |
|---|---|---|---|
| 矩形窗 | 0.89/T | -13 | -6 |
| 汉明窗 | 1.30/T | -43 | -6 |
| 汉宁窗 | 1.44/T | -31 | -18 |
| 布莱克曼窗 | 1.68/T | -58 | -18 |
加权匹配滤波器设计:

2.2 相位编码信号脉冲压缩
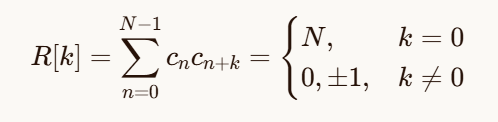
2.2.1 巴克码
巴克码是具有理想自相关特性的二元序列:
| 长度N | 巴克码序列 | 峰值旁瓣比 |
|---|---|---|
| 2 | ++, +- | 1 |
| 3 | ++- | 2 |
| 4 | +++-, ++-+ | 2 |
| 5 | +++-+ | 2 |
| 7 | +++--+- | 3 |
| 11 | +++---+--+- | 2 |
| 13 | +++++--++-+-+ | 2 |
自相关函数:
2.2.2 随机相位编码
随机相位编码具有"图钉"型模糊函数,但存在距离-多普勒耦合问题。
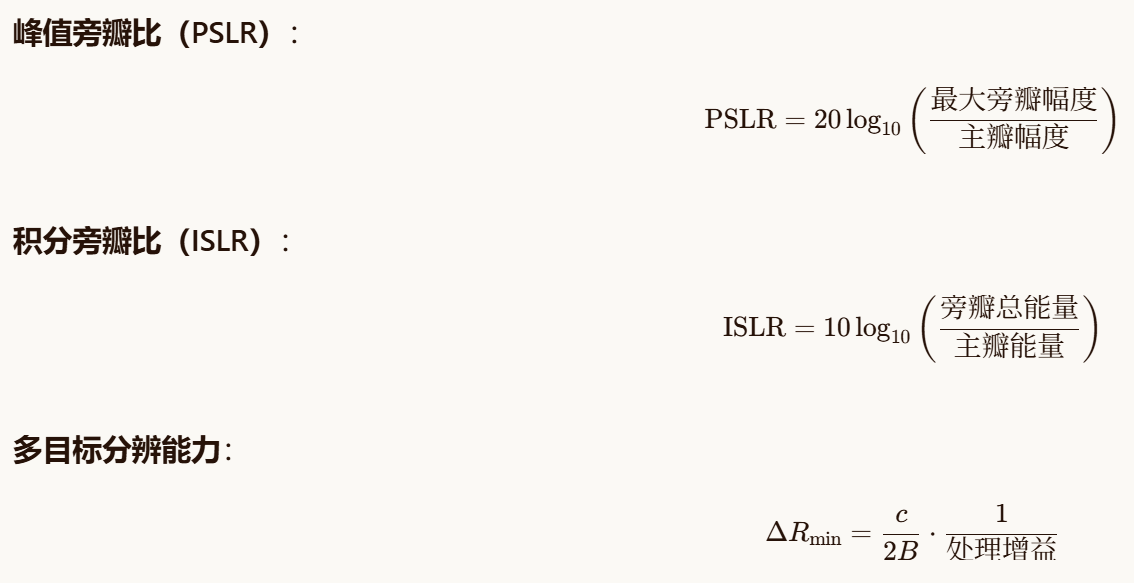
2.3 脉冲压缩性能分析

3. 动目标处理技术
3.1 动目标显示(MTI)
3.1.1 延迟线对消器
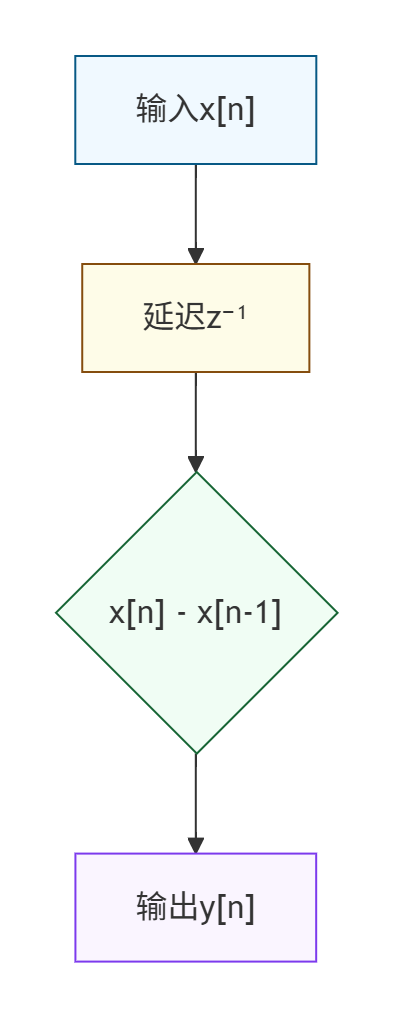
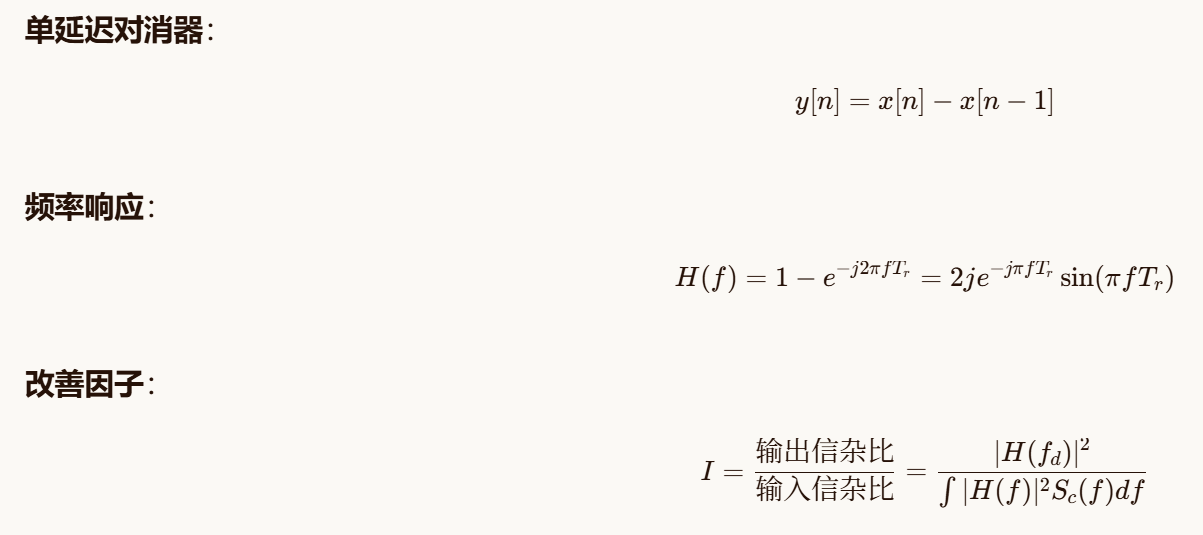
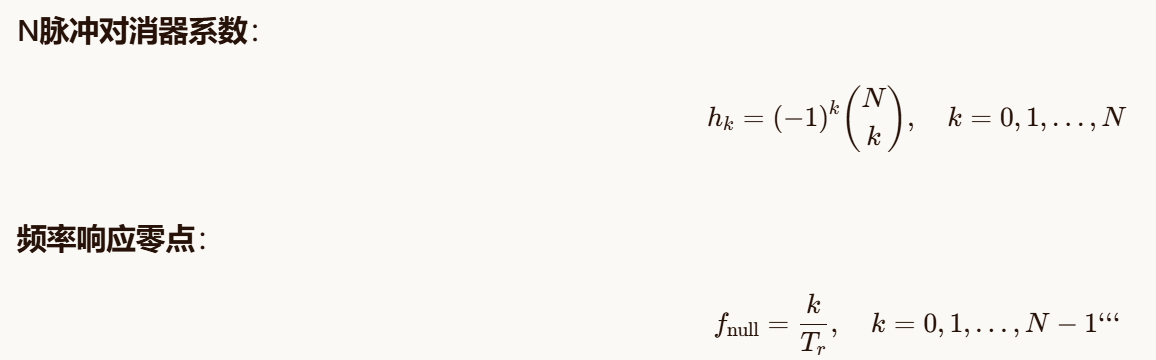
3.1.2 二项式加权MTI
3.2 动目标检测(MTD)
3.2.1 多普勒滤波器组
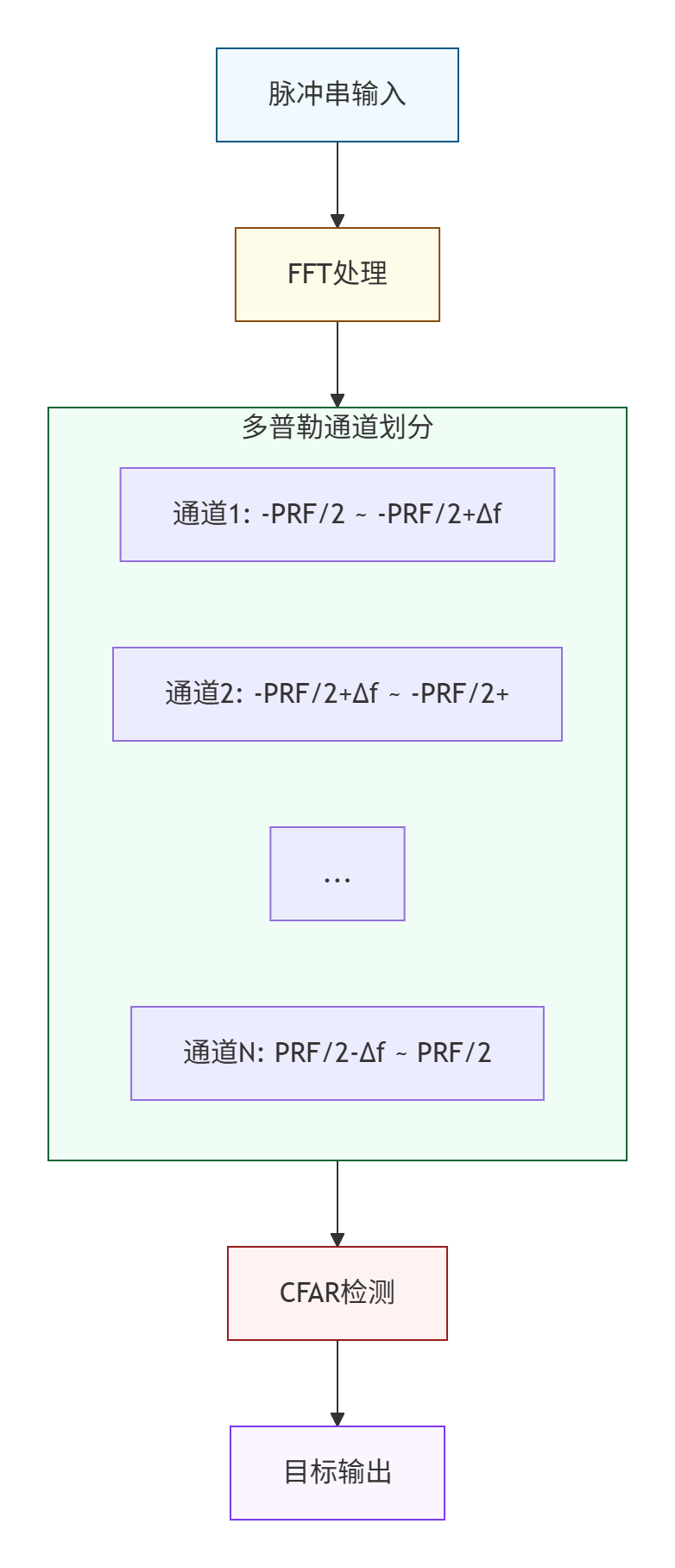
3.2.2 杂波图技术
杂波图用于存储每个距离-方位单元的杂波功率估计,实现CFAR检测:
3.3 脉冲多普勒处理
3.3.1 距离-多普勒矩阵
python
import numpy as np
from scipy import signal
import matplotlib.pyplot as plt
class PulseDopplerProcessor:
"""脉冲多普勒处理器"""
def __init__(self, config):
self.config = config
self.num_pulses = config.get('num_pulses', 64)
self.num_range_bins = config.get('num_range_bins', 256)
self.prf = config.get('prf', 1000) # Hz
self.doppler_fft_size = config.get('doppler_fft_size', 128)
def process_range_doppler(self, pulse_matrix):
"""
处理距离-多普勒矩阵
参数:
pulse_matrix: 脉冲矩阵,形状为(num_pulses, num_range_bins)
返回:
距离-多普勒谱
"""
# 沿脉冲维进行FFT
doppler_fft = np.fft.fft(pulse_matrix, n=self.doppler_fft_size, axis=0)
# 计算幅度谱
doppler_spectrum = np.abs(doppler_fft)
# 计算多普勒频率轴
doppler_freq = np.fft.fftfreq(self.doppler_fft_size, 1/self.prf)
# 计算速度轴
wavelength = 3e8 / self.config.get('frequency', 3e9)
doppler_velocity = doppler_freq * wavelength / 2
return {
'range_doppler': doppler_spectrum,
'doppler_freq': doppler_freq,
'doppler_velocity': doppler_velocity
}
def apply_cfar_2d(self, range_doppler, guard_bands=(2, 2), train_bands=(10, 10)):
"""
2D-CFAR检测
参数:
range_doppler: 距离-多普勒矩阵
guard_bands: 保护单元 (多普勒, 距离)
train_bands: 训练单元 (多普勒, 距离)
返回:
检测矩阵
"""
num_doppler, num_range = range_doppler.shape
detection_map = np.zeros_like(range_doppler, dtype=bool)
for i in range(num_doppler):
for j in range(num_range):
# 跳过边缘
if (i < guard_bands[0] + train_bands[0] or
i >= num_doppler - guard_bands[0] - train_bands[0] or
j < guard_bands[1] + train_bands[1] or
j >= num_range - guard_bands[1] - train_bands[1]):
continue
# 提取训练单元
doppler_train = self._extract_training_cells(
range_doppler, i, j, 0, guard_bands, train_bands
)
range_train = self._extract_training_cells(
range_doppler, i, j, 1, guard_bands, train_bands
)
training_cells = np.concatenate([doppler_train, range_train])
# 计算阈值
threshold = np.mean(training_cells) * self.config.get('cfar_threshold', 1.5)
# 检测判断
if range_doppler[i, j] > threshold:
detection_map[i, j] = True
return detection_map
def _extract_training_cells(self, matrix, i, j, axis, guard_bands, train_bands):
"""提取训练单元"""
if axis == 0: # 多普勒维
# 上方训练单元
upper_start = i - train_bands[0] - guard_bands[0]
upper_end = i - guard_bands[0]
upper_train = matrix[upper_start:upper_end, j] if upper_start >= 0 else []
# 下方训练单元
lower_start = i + guard_bands[0] + 1
lower_end = i + guard_bands[0] + train_bands[0] + 1
lower_train = matrix[lower_start:lower_end, j] if lower_end <= matrix.shape[0] else []
return np.concatenate([upper_train, lower_train])
else: # 距离维
# 左方训练单元
left_start = j - train_bands[1] - guard_bands[1]
left_end = j - guard_bands[1]
left_train = matrix[i, left_start:left_end] if left_start >= 0 else []
# 右方训练单元
right_start = j + guard_bands[1] + 1
right_end = j + guard_bands[1] + train_bands[1] + 1
right_train = matrix[i, right_start:right_end] if right_end <= matrix.shape[1] else []
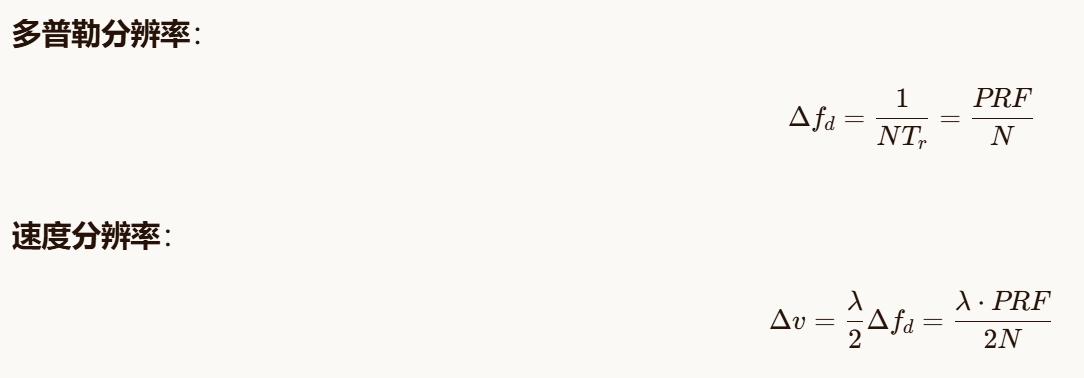
return np.concatenate([left_train, right_train])3.3.2 速度解模糊
最大不模糊速度:
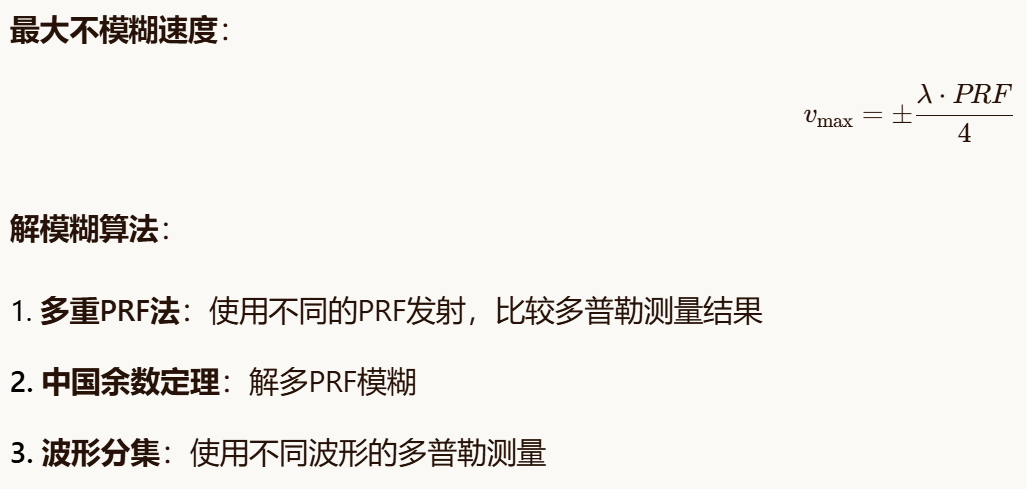
4. 先进信号处理技术
4.1 空时自适应处理(STAP)
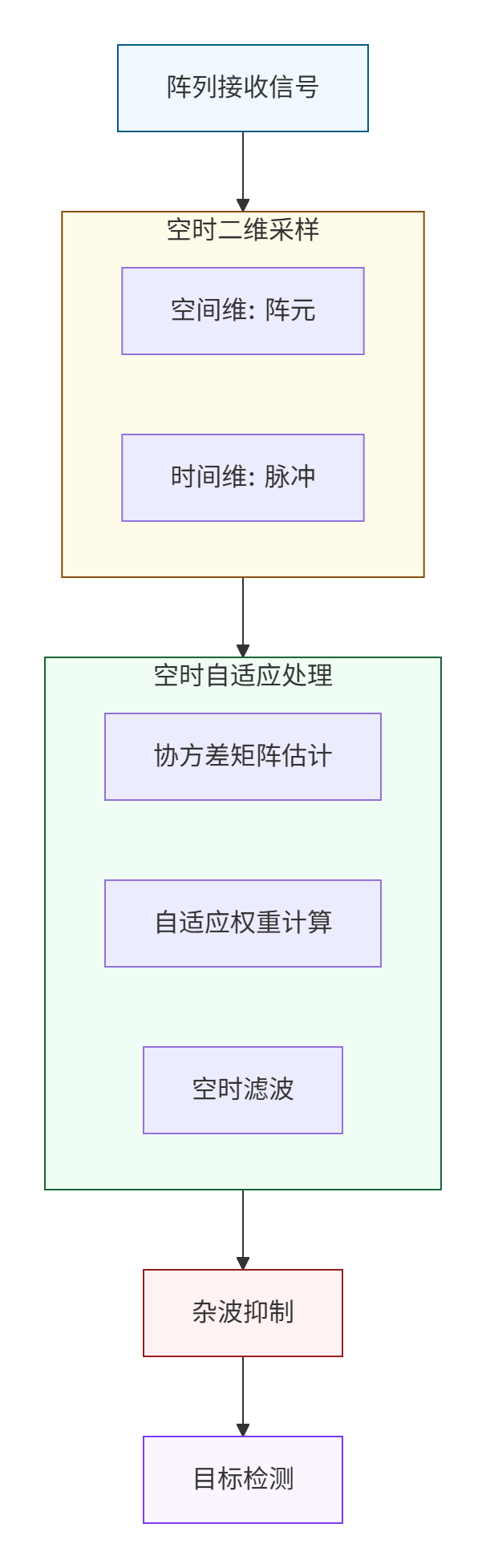
STAP数学模型:
最优权重(维纳解):
4.2 超分辨率算法
4.2.1 MUSIC算法
python
import numpy as np
from scipy import linalg
class MusicProcessor:
"""MUSIC超分辨率算法"""
def __init__(self, num_sensors, num_sources):
self.num_sensors = num_sensors
self.num_sources = num_sources
def estimate_doa(self, data_matrix, search_angles):
"""
估计波达方向
参数:
data_matrix: 数据矩阵,形状为(num_sensors, num_snapshots)
search_angles: 搜索角度范围(度)
返回:
DOA估计结果
"""
# 计算协方差矩阵
R = data_matrix @ data_matrix.conj().T / data_matrix.shape[1]
# 特征值分解
eigenvalues, eigenvectors = linalg.eigh(R)
# 按特征值降序排序
idx = np.argsort(eigenvalues)[::-1]
eigenvalues = eigenvalues[idx]
eigenvectors = eigenvectors[:, idx]
# 噪声子空间
noise_subspace = eigenvectors[:, self.num_sources:]
# MUSIC谱
music_spectrum = np.zeros(len(search_angles))
for i, angle in enumerate(search_angles):
# 构造导向矢量
a = self._steering_vector(angle)
# 计算MUSIC谱
denominator = a.conj().T @ noise_subspace @ noise_subspace.conj().T @ a
music_spectrum[i] = 1 / np.abs(denominator)
return {
'angles': search_angles,
'spectrum': music_spectrum,
'eigenvalues': eigenvalues
}
def _steering_vector(self, angle_deg):
"""构造导向矢量"""
angle_rad = np.deg2rad(angle_deg)
# 均匀线阵
d = 0.5 # 半波长间距
phases = 2 * np.pi * d * np.arange(self.num_sensors) * np.sin(angle_rad)
return np.exp(1j * phases)4.2.2 压缩感知
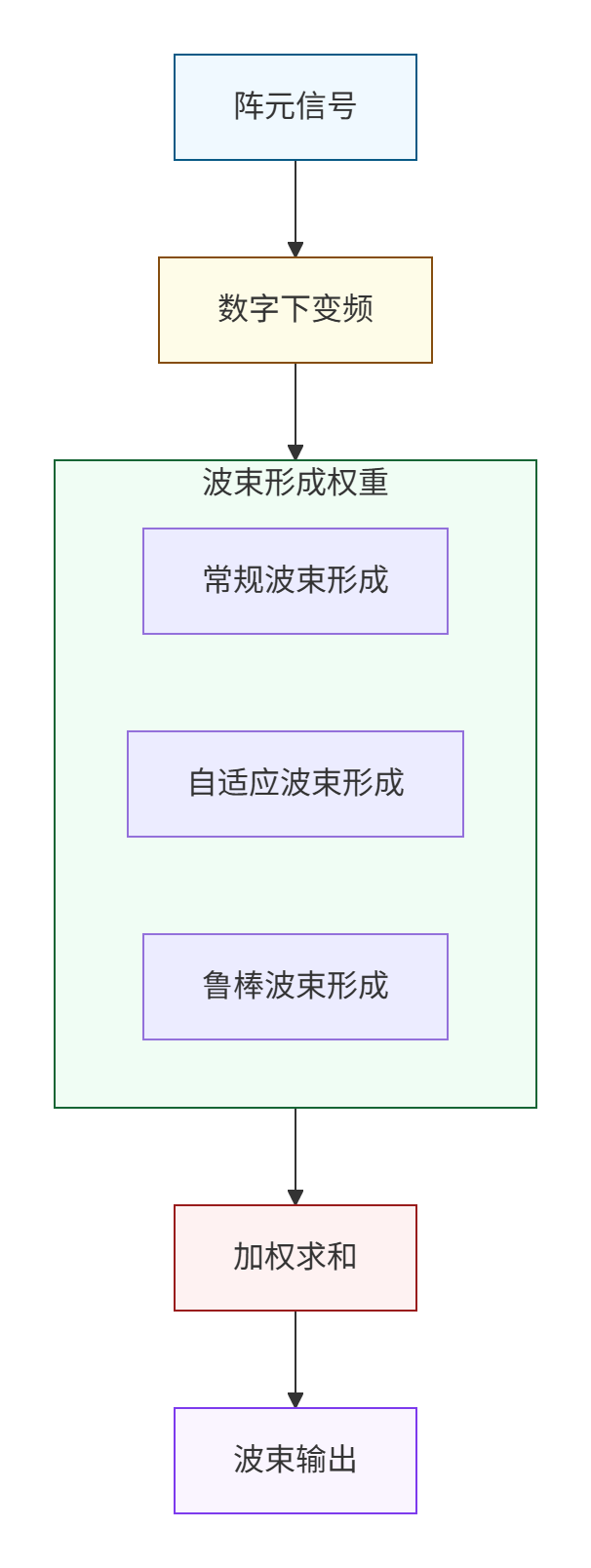
4.3 数字波束形成
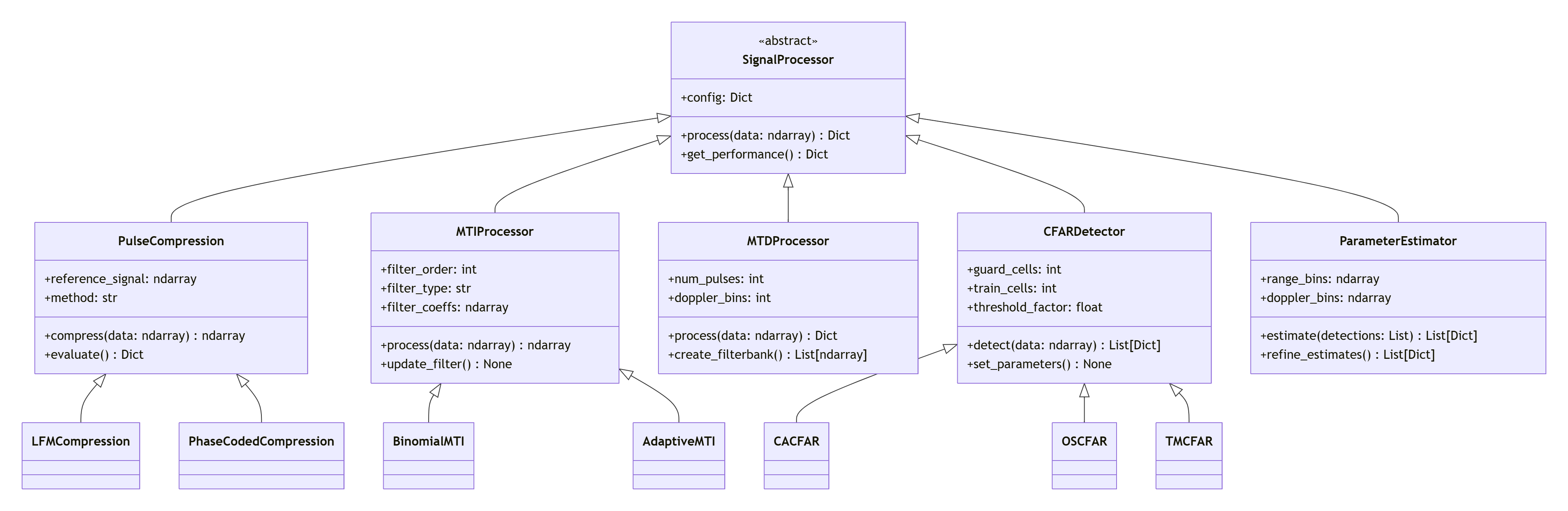
5. 信号处理算法实现
5.1 算法库设计架构
5.2 核心算法实现
python
import numpy as np
from typing import List, Dict, Tuple, Optional
import time
from dataclasses import dataclass
from abc import ABC, abstractmethod
@dataclass
class ProcessingConfig:
"""信号处理配置"""
# 脉冲压缩参数
pulse_width: float = 1e-6
bandwidth: float = 10e6
sampling_rate: float = 20e6
compression_method: str = 'matched_filter'
window_type: str = 'hamming'
# MTI参数
mti_order: int = 3
mti_type: str = 'binomial'
# 多普勒处理参数
num_pulses: int = 64
doppler_fft_size: int = 128
prf: float = 1000
# CFAR参数
cfar_type: str = 'ca'
cfar_guard: int = 10
cfar_train: int = 20
cfar_threshold: float = 1.5
# 性能监控
enable_perf_monitor: bool = True
class BaseSignalProcessor(ABC):
"""信号处理器基类"""
def __init__(self, config: ProcessingConfig):
self.config = config
self.perf_stats = {
'processing_time': 0.0,
'memory_usage': 0.0,
'algorithm_specific': {}
}
@abstractmethod
def process(self, data: np.ndarray) -> Dict:
"""处理数据"""
pass
def get_performance_stats(self) -> Dict:
"""获取性能统计"""
return self.perf_stats.copy()
def _start_timer(self):
"""开始计时"""
self._start_time = time.perf_counter()
def _stop_timer(self):
"""停止计时并记录"""
elapsed = time.perf_counter() - self._start_time
self.perf_stats['processing_time'] = elapsed
class LFMCompression(BaseSignalProcessor):
"""线性调频脉冲压缩"""
def __init__(self, config: ProcessingConfig):
super().__init__(config)
self._create_reference_signal()
self._create_matched_filter()
def _create_reference_signal(self):
"""生成参考信号(LFM)"""
t = np.linspace(0, self.config.pulse_width,
int(self.config.sampling_rate * self.config.pulse_width),
endpoint=False)
# 线性调频
chirp_rate = self.config.bandwidth / self.config.pulse_width
phase = 2 * np.pi * (0.5 * chirp_rate * t**2) # 基带信号
self.reference_signal = np.exp(1j * phase)
# 加窗处理
if self.config.window_type == 'hamming':
window = np.hamming(len(self.reference_signal))
elif self.config.window_type == 'hanning':
window = np.hanning(len(self.reference_signal))
elif self.config.window_type == 'blackman':
window = np.blackman(len(self.reference_signal))
else:
window = np.ones(len(self.reference_signal))
self.reference_signal = self.reference_signal * window
def _create_matched_filter(self):
"""创建匹配滤波器"""
if self.config.compression_method == 'matched_filter':
# 时域匹配滤波器
self.matched_filter = np.conj(self.reference_signal[::-1])
elif self.config.compression_method == 'frequency_domain':
# 频域匹配滤波器
self.matched_filter = np.conj(np.fft.fft(self.reference_signal))
def process(self, data: np.ndarray) -> Dict:
"""脉冲压缩处理"""
self._start_timer()
if self.config.compression_method == 'matched_filter':
# 时域卷积
compressed = np.convolve(data, self.matched_filter, mode='same')
elif self.config.compression_method == 'frequency_domain':
# 频域相乘
data_fft = np.fft.fft(data)
compressed_fft = data_fft * self.matched_filter
compressed = np.fft.ifft(compressed_fft)
else:
raise ValueError(f"不支持的压缩方法: {self.config.compression_method}")
self._stop_timer()
# 计算性能指标
self._calculate_performance_metrics(compressed)
return {
'compressed_signal': compressed,
'compression_ratio': len(data) / len(compressed),
'reference_signal': self.reference_signal
}
def _calculate_performance_metrics(self, compressed_signal: np.ndarray):
"""计算性能指标"""
# 计算距离分辨率
range_res = 3e8 / (2 * self.config.bandwidth)
# 计算峰值旁瓣比
compressed_power = np.abs(compressed_signal)**2
max_val = np.max(compressed_power)
mainlobe_idx = np.argmax(compressed_power)
# 提取旁瓣
guard_samples = int(0.1 * len(compressed_power)) # 保护10%的主瓣
sidelobe_indices = np.concatenate([
np.arange(0, mainlobe_idx - guard_samples),
np.arange(mainlobe_idx + guard_samples, len(compressed_power))
])
if len(sidelobe_indices) > 0:
max_sidelobe = np.max(compressed_power[sidelobe_indices])
pslr_db = 10 * np.log10(max_sidelobe / max_val)
else:
pslr_db = -np.inf
# 计算积分旁瓣比
if len(sidelobe_indices) > 0:
sidelobe_energy = np.sum(compressed_power[sidelobe_indices])
mainlobe_energy = np.sum(compressed_power) - sidelobe_energy
islr_db = 10 * np.log10(sidelobe_energy / mainlobe_energy)
else:
islr_db = -np.inf
self.perf_stats['algorithm_specific'] = {
'range_resolution': range_res,
'pslr_db': pslr_db,
'islr_db': islr_db,
'compression_ratio': self.config.pulse_width * self.config.bandwidth
}5.3 性能优化技术
5.3.1 向量化计算优化
python
import numpy as np
from numba import jit, prange
class OptimizedSignalProcessor:
"""优化信号处理器"""
def __init__(self):
self.use_numba = True
@staticmethod
@jit(nopython=True, parallel=True, fastmath=True)
def vectorized_cfar(data: np.ndarray, guard: int, train: int,
threshold_factor: float) -> np.ndarray:
"""
向量化CFAR检测(Numba加速)
参数:
data: 输入数据
guard: 保护单元数
train: 训练单元数
threshold_factor: 阈值因子
返回:
检测标志数组
"""
n = len(data)
detections = np.zeros(n, dtype=np.bool_)
for i in prange(train + guard, n - train - guard):
# 训练单元
left_train = data[i - train - guard:i - guard]
right_train = data[i + guard + 1:i + guard + train + 1]
# 计算噪声估计
noise_estimate = np.mean(np.concatenate((left_train, right_train)))
# 检测判断
if data[i] > noise_estimate * threshold_factor:
detections[i] = True
return detections
def optimized_pulse_compression(self, signal: np.ndarray,
reference: np.ndarray) -> np.ndarray:
"""
优化脉冲压缩
使用频域卷积,避免时域卷积的高计算复杂度
"""
# 补零到2的幂次长度,优化FFT性能
fft_len = 2**int(np.ceil(np.log2(len(signal) + len(reference) - 1)))
# 频域卷积
signal_fft = np.fft.fft(signal, fft_len)
reference_fft = np.fft.fft(reference, fft_len)
compressed_fft = signal_fft * np.conj(reference_fft)
compressed = np.fft.ifft(compressed_fft)[:len(signal)]
return compressed
def batch_processing(self, data_batch: np.ndarray,
batch_size: int = 100) -> np.ndarray:
"""
批处理优化
减少函数调用开销,提高缓存利用率
"""
num_batches = int(np.ceil(len(data_batch) / batch_size))
results = []
for i in range(num_batches):
start_idx = i * batch_size
end_idx = min((i + 1) * batch_size, len(data_batch))
# 处理一个批次
batch_data = data_batch[start_idx:end_idx]
batch_result = self.process_batch(batch_data)
results.append(batch_result)
return np.concatenate(results)5.3.2 GPU加速
python
try:
import cupy as cp
class GPUAcceleratedProcessor:
"""GPU加速处理器"""
def __init__(self):
self.use_gpu = True
self.stream = cp.cuda.Stream()
def gpu_pulse_compression(self, signal: np.ndarray,
reference: np.ndarray) -> np.ndarray:
"""
GPU加速脉冲压缩
"""
# 传输数据到GPU
signal_gpu = cp.asarray(signal)
reference_gpu = cp.asarray(reference)
# GPU上的FFT和卷积
with self.stream:
signal_fft = cp.fft.fft(signal_gpu)
reference_fft = cp.fft.fft(reference_gpu)
compressed_fft = signal_fft * cp.conj(reference_fft)
compressed_gpu = cp.fft.ifft(compressed_fft)
# 同步流
self.stream.synchronize()
# 传输结果回CPU
compressed = cp.asnumpy(compressed_gpu)
return compressed
except ImportError:
print("CuPy not available, falling back to CPU")6. 完整信号处理链实现
6.1 处理链设计

6.2 实时处理框架
python
import threading
import queue
import time
from collections import deque
from dataclasses import dataclass
from typing import Optional, List, Dict
@dataclass
class ProcessingMetrics:
"""处理性能指标"""
latency: float = 0.0
throughput: float = 0.0
cpu_usage: float = 0.0
memory_usage: float = 0.0
processing_time: float = 0.0
queue_size: int = 0
class RealTimeProcessor:
"""实时信号处理器"""
def __init__(self, config: ProcessingConfig, buffer_size: int = 1000):
self.config = config
self.input_queue = queue.Queue(maxsize=buffer_size)
self.output_queue = queue.Queue(maxsize=buffer_size)
# 初始化处理模块
self.pulse_compressor = LFMCompression(config)
self.mti_processor = MTIProcessor(config)
self.mtd_processor = MTDProcessor(config)
self.cfar_detector = CFARDetector(config)
self.param_estimator = ParameterEstimator(config)
# 性能监控
self.metrics = ProcessingMetrics()
self.processing_history = deque(maxlen=1000)
# 控制标志
self.is_running = False
self.processing_thread = None
def start(self):
"""启动实时处理"""
if self.is_running:
return
self.is_running = True
self.processing_thread = threading.Thread(target=self._processing_loop, daemon=True)
self.processing_thread.start()
def stop(self):
"""停止实时处理"""
self.is_running = False
if self.processing_thread:
self.processing_thread.join(timeout=5.0)
def put_data(self, data: np.ndarray, metadata: Optional[Dict] = None) -> bool:
"""
输入数据
返回:
是否成功放入队列
"""
try:
packet = {
'data': data,
'timestamp': time.time(),
'metadata': metadata or {}
}
self.input_queue.put(packet, block=False)
return True
except queue.Full:
return False
def get_result(self, block: bool = True, timeout: Optional[float] = None) -> Optional[Dict]:
"""
获取处理结果
返回:
处理结果,如果队列为空则返回None
"""
try:
return self.output_queue.get(block=block, timeout=timeout)
except queue.Empty:
return None
def _processing_loop(self):
"""处理循环"""
while self.is_running:
try:
# 获取输入数据
input_packet = self.input_queue.get(timeout=0.1)
# 处理开始时间
process_start = time.perf_counter()
# 执行处理链
result = self._process_signal_chain(input_packet)
# 计算处理时间
process_time = time.perf_counter() - process_start
# 更新性能指标
self._update_metrics(process_time)
# 放入输出队列
if result is not None:
self.output_queue.put(result, block=False)
except queue.Empty:
continue
except Exception as e:
print(f"Processing error: {e}")
continue
def _process_signal_chain(self, input_packet: Dict) -> Dict:
"""信号处理链"""
signal_data = input_packet['data']
# 1. 脉冲压缩
compression_result = self.pulse_compressor.process(signal_data)
compressed_signal = compression_result['compressed_signal']
# 2. MTI处理
mti_result = self.mti_processor.process(compressed_signal)
mti_output = mti_result['output']
# 3. 多普勒处理
mtd_result = self.mtd_processor.process(mti_output)
doppler_output = mtd_result['doppler_spectrum']
# 4. CFAR检测
detection_result = self.cfar_detector.detect(doppler_output)
detections = detection_result['detections']
# 5. 参数估计
estimation_result = self.param_estimator.estimate(detections)
# 组装结果
result = {
'timestamp': input_packet['timestamp'],
'input_metadata': input_packet['metadata'],
'processing_time': time.perf_counter() - input_packet['timestamp'],
'compression_result': compression_result,
'mti_result': mti_result,
'mtd_result': mtd_result,
'detection_result': detection_result,
'estimation_result': estimation_result,
'metrics': self.metrics
}
return result
def _update_metrics(self, processing_time: float):
"""更新性能指标"""
# 计算延迟
self.metrics.latency = processing_time
# 计算吞吐量
self.metrics.throughput = 1.0 / processing_time if processing_time > 0 else 0
# 记录处理时间
self.metrics.processing_time = processing_time
# 队列大小
self.metrics.queue_size = self.input_queue.qsize()
# 记录历史
self.processing_history.append({
'timestamp': time.time(),
'processing_time': processing_time,
'queue_size': self.metrics.queue_size
})
def get_performance_report(self) -> Dict:
"""获取性能报告"""
if not self.processing_history:
return {}
# 计算统计
processing_times = [h['processing_time'] for h in self.processing_history]
queue_sizes = [h['queue_size'] for h in self.processing_history]
report = {
'current': {
'latency': self.metrics.latency,
'throughput': self.metrics.throughput,
'queue_size': self.metrics.queue_size
},
'statistics': {
'avg_processing_time': np.mean(processing_times),
'std_processing_time': np.std(processing_times),
'max_processing_time': np.max(processing_times),
'min_processing_time': np.min(processing_times),
'avg_queue_size': np.mean(queue_sizes),
'max_queue_size': np.max(queue_sizes)
},
'history': list(self.processing_history)[-100:] # 最近100条记录
}
return report7. 仿真与分析
7.1 算法性能仿真框架
python
import numpy as np
import matplotlib.pyplot as plt
from scipy import signal
from dataclasses import dataclass
from typing import List, Dict, Tuple
import time
@dataclass
class SimulationConfig:
"""仿真配置"""
# 信号参数
frequency: float = 3e9
bandwidth: float = 10e6
pulse_width: float = 1e-6
sampling_rate: float = 20e6
prf: float = 1000
# 目标参数
target_ranges: List[float] = None
target_velocities: List[float] = None
target_rcs: List[float] = None
# 环境参数
noise_power: float = 1e-12
clutter_power: float = 1e-9
jamming_power: float = 1e-6
# 仿真控制
num_pulses: int = 64
num_trials: int = 100
def __post_init__(self):
if self.target_ranges is None:
self.target_ranges = [1000, 2000, 3000]
if self.target_velocities is None:
self.target_velocities = [0, 50, -30]
if self.target_rcs is None:
self.target_rcs = [1.0, 0.5, 2.0]
class AlgorithmBenchmark:
"""算法性能基准测试"""
def __init__(self, config: SimulationConfig):
self.config = config
self.results = {}
def benchmark_pulse_compression(self, methods: List[str] = None) -> Dict:
"""脉冲压缩算法基准测试"""
if methods is None:
methods = ['matched_filter', 'frequency_domain', 'correlation']
results = {}
for method in methods:
# 生成测试信号
test_signal, reference = self._generate_test_signal()
# 创建处理器
config = ProcessingConfig(
pulse_width=self.config.pulse_width,
bandwidth=self.config.bandwidth,
sampling_rate=self.config.sampling_rate,
compression_method=method
)
processor = LFMCompression(config)
# 运行测试
times = []
for _ in range(self.config.num_trials):
start_time = time.perf_counter()
result = processor.process(test_signal)
end_time = time.perf_counter()
times.append(end_time - start_time)
# 计算性能指标
compressed = result['compressed_signal']
perf_stats = processor.get_performance_stats()
results[method] = {
'avg_time': np.mean(times),
'std_time': np.std(times),
'min_time': np.min(times),
'max_time': np.max(times),
'compression_ratio': result['compression_ratio'],
'pslr': perf_stats['algorithm_specific']['pslr_db'],
'islr': perf_stats['algorithm_specific']['islr_db'],
'range_resolution': perf_stats['algorithm_specific']['range_resolution']
}
self.results['pulse_compression'] = results
return results
def benchmark_mti_performance(self, orders: List[int] = None) -> Dict:
"""MTI性能基准测试"""
if orders is None:
orders = [1, 2, 3, 4]
results = {}
for order in orders:
# 生成测试信号(含杂波)
test_signals = self._generate_clutter_signals()
# 创建处理器
config = ProcessingConfig(mti_order=order)
processor = MTIProcessor(config)
# 运行测试
improvement_factors = []
processing_times = []
for signal_matrix in test_signals:
# 计算输入杂波功率
input_power = np.mean(np.abs(signal_matrix)**2)
# 处理
start_time = time.perf_counter()
result = processor.process(signal_matrix)
end_time = time.perf_counter()
# 计算输出杂波功率
output_power = np.mean(np.abs(result['output'])**2)
# 计算改善因子
if output_power > 0:
improvement = 10 * np.log10(input_power / output_power)
improvement_factors.append(improvement)
processing_times.append(end_time - start_time)
results[order] = {
'avg_improvement': np.mean(improvement_factors) if improvement_factors else 0,
'std_improvement': np.std(improvement_factors) if improvement_factors else 0,
'avg_processing_time': np.mean(processing_times),
'std_processing_time': np.std(processing_times)
}
self.results['mti_performance'] = results
return results
def benchmark_cfar_detection(self, cfar_types: List[str] = None) -> Dict:
"""CFAR检测性能基准测试"""
if cfar_types is None:
cfar_types = ['ca', 'os', 'tm', 'goc', 'soc']
results = {}
for cfar_type in cfar_types:
# 生成测试场景
test_scenarios = self._generate_detection_scenarios()
# 创建检测器
config = ProcessingConfig(cfar_type=cfar_type)
detector = CFARDetector(config)
# 性能统计
pd_results = []
pfa_results = []
processing_times = []
for scenario in test_scenarios:
# 运行检测
start_time = time.perf_counter()
detections = detector.detect(scenario['signal'])
end_time = time.perf_counter()
# 计算检测概率和虚警概率
pd, pfa = self._calculate_detection_metrics(detections, scenario['ground_truth'])
pd_results.append(pd)
pfa_results.append(pfa)
processing_times.append(end_time - start_time)
results[cfar_type] = {
'avg_pd': np.mean(pd_results),
'std_pd': np.std(pd_results),
'avg_pfa': np.mean(pfa_results),
'std_pfa': np.std(pfa_results),
'avg_processing_time': np.mean(processing_times),
'std_processing_time': np.std(processing_times)
}
self.results['cfar_performance'] = results
return results
def plot_comparison_results(self, save_path: str = None):
"""绘制比较结果"""
fig, axes = plt.subplots(2, 2, figsize=(12, 10))
# 1. 脉冲压缩性能比较
if 'pulse_compression' in self.results:
ax = axes[0, 0]
methods = list(self.results['pulse_compression'].keys())
times = [self.results['pulse_compression'][m]['avg_time'] * 1000 for m in methods]
pslr = [self.results['pulse_compression'][m]['pslr'] for m in methods]
x = np.arange(len(methods))
width = 0.35
bars1 = ax.bar(x - width/2, times, width, label='处理时间(ms)')
ax.set_ylabel('处理时间 (ms)')
ax.set_xticks(x)
ax.set_xticklabels(methods)
ax2 = ax.twinx()
bars2 = ax2.bar(x + width/2, pslr, width, color='orange', label='PSLR(dB)')
ax2.set_ylabel('峰值旁瓣比 (dB)')
ax.set_title('脉冲压缩算法性能比较')
ax.legend([bars1, bars2], ['处理时间', 'PSLR'], loc='upper right')
# 2. MTI性能比较
if 'mti_performance' in self.results:
ax = axes[0, 1]
orders = list(self.results['mti_performance'].keys())
improvements = [self.results['mti_performance'][o]['avg_improvement'] for o in orders]
times = [self.results['mti_performance'][o]['avg_processing_time'] * 1000 for o in orders]
ax.plot(orders, improvements, 'o-', label='改善因子')
ax.set_xlabel('MTI阶数')
ax.set_ylabel('改善因子 (dB)', color='blue')
ax.tick_params(axis='y', labelcolor='blue')
ax2 = ax.twinx()
ax2.plot(orders, times, 's--', color='red', label='处理时间')
ax2.set_ylabel('处理时间 (ms)', color='red')
ax2.tick_params(axis='y', labelcolor='red')
ax.set_title('MTI性能比较')
ax.legend(loc='upper left')
ax2.legend(loc='upper right')
# 3. CFAR检测性能比较
if 'cfar_performance' in self.results:
ax = axes[1, 0]
cfar_types = list(self.results['cfar_performance'].keys())
pd_values = [self.results['cfar_performance'][t]['avg_pd'] for t in cfar_types]
pfa_values = [self.results['cfar_performance'][t]['avg_pfa'] for t in cfar_types]
x = np.arange(len(cfar_types))
width = 0.35
bars1 = ax.bar(x - width/2, pd_values, width, label='检测概率')
bars2 = ax.bar(x + width/2, pfa_values, width, label='虚警概率')
ax.set_xlabel('CFAR类型')
ax.set_ylabel('概率')
ax.set_xticks(x)
ax.set_xticklabels(cfar_types)
ax.set_title('CFAR检测性能比较')
ax.legend()
ax.set_ylim([0, 1])
# 添加数值标签
for bars in [bars1, bars2]:
for bar in bars:
height = bar.get_height()
ax.text(bar.get_x() + bar.get_width()/2, height + 0.01,
f'{height:.3f}', ha='center', va='bottom', fontsize=8)
# 4. ROC曲线
if 'cfar_performance' in self.results:
ax = axes[1, 1]
for cfar_type in cfar_types:
# 这里可以绘制不同信噪比下的ROC曲线
# 简化处理,只绘制一个点
pd = self.results['cfar_performance'][cfar_type]['avg_pd']
pfa = self.results['cfar_performance'][cfar_type]['avg_pfa']
ax.plot(pfa, pd, 'o', label=cfar_type, markersize=8)
ax.set_xlabel('虚警概率')
ax.set_ylabel('检测概率')
ax.set_title('ROC曲线比较')
ax.legend()
ax.grid(True, alpha=0.3)
ax.set_xscale('log')
ax.set_xlim([1e-4, 1])
ax.set_ylim([0, 1])
plt.tight_layout()
if save_path:
plt.savefig(save_path, dpi=300, bbox_inches='tight')
plt.close()
else:
plt.show()
def _generate_test_signal(self) -> Tuple[np.ndarray, np.ndarray]:
"""生成测试信号"""
# 生成LFM信号
t = np.linspace(0, self.config.pulse_width,
int(self.config.sampling_rate * self.config.pulse_width),
endpoint=False)
chirp_rate = self.config.bandwidth / self.config.pulse_width
phase = 2 * np.pi * (0.5 * chirp_rate * t**2)
reference_signal = np.exp(1j * phase)
# 添加噪声
noise = np.sqrt(self.config.noise_power/2) * (
np.random.randn(len(reference_signal)) +
1j * np.random.randn(len(reference_signal))
)
test_signal = reference_signal + noise
return test_signal, reference_signal
def _generate_clutter_signals(self, num_scenarios: int = 10) -> List[np.ndarray]:
"""生成含杂波的测试信号"""
scenarios = []
for _ in range(num_scenarios):
# 生成杂波信号
num_pulses = self.config.num_pulses
num_samples = int(self.config.sampling_rate * self.config.pulse_width)
# 创建随机杂波
clutter = np.sqrt(self.config.clutter_power/2) * (
np.random.randn(num_pulses, num_samples) +
1j * np.random.randn(num_pulses, num_samples)
)
scenarios.append(clutter)
return scenarios
def _generate_detection_scenarios(self, num_scenarios: int = 20) -> List[Dict]:
"""生成检测测试场景"""
scenarios = []
for _ in range(num_scenarios):
# 生成随机信号
signal_length = 1000
signal = np.random.randn(signal_length) + 1j * np.random.randn(signal_length)
signal = signal / np.sqrt(2) # 归一化
# 随机添加目标
ground_truth = []
num_targets = np.random.randint(1, 5)
for _ in range(num_targets):
position = np.random.randint(100, 900)
amplitude = np.random.uniform(2, 5) # 信噪比
signal[position] += amplitude
ground_truth.append(position)
scenarios.append({
'signal': np.abs(signal),
'ground_truth': ground_truth
})
return scenarios
def _calculate_detection_metrics(self, detections: List[Dict],
ground_truth: List[int]) -> Tuple[float, float]:
"""计算检测性能指标"""
if not detections or not ground_truth:
return 0.0, 0.0
# 提取检测位置
detected_positions = [d.get('position', 0) for d in detections]
# 计算检测概率
hits = 0
for truth_pos in ground_truth:
# 允许±2个单元的位置误差
for det_pos in detected_positions:
if abs(det_pos - truth_pos) <= 2:
hits += 1
break
pd = hits / len(ground_truth) if ground_truth else 0
# 计算虚警概率
false_alarms = len(detected_positions) - hits
pfa = false_alarms / len(detections) if detections else 0
return pd, pfa8.1 关键技术总结
9. 实战应用案例分析
9.1 气象雷达信号处理系统
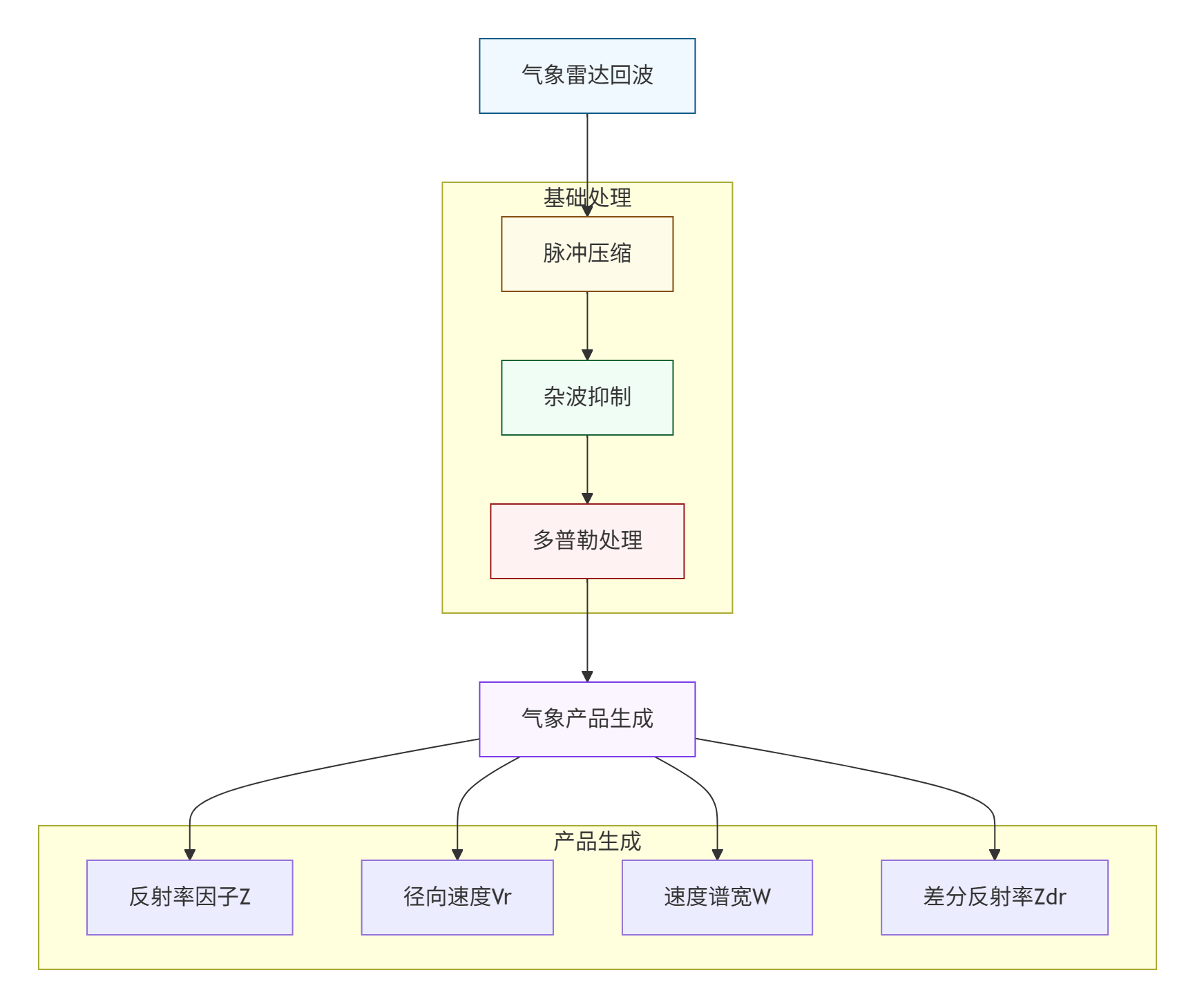
9.1.1 气象雷达信号特点
-
强地物杂波
-
降水粒子散射
-
多普勒频移
-
衰减效应
9.1.2 关键技术实现
python
import numpy as np
from typing import Dict, List, Tuple
import matplotlib.pyplot as plt
from scipy import signal, fft
class WeatherRadarProcessor:
"""气象雷达信号处理器"""
def __init__(self, config: Dict):
self.config = config
self.wavelength = 3e8 / config.get('frequency', 2.8e9) # S波段
def estimate_reflectivity(self, received_power: np.ndarray) -> np.ndarray:
"""
估计反射率因子
参数:
received_power: 接收功率,单位W
返回:
反射率因子Z,单位dBZ
"""
# 雷达常数计算
Pt = self.config.get('transmit_power', 1e6) # 发射功率
G = self.config.get('antenna_gain', 45) # 天线增益
lambda_m = self.wavelength
c = 3e8
# 雷达常数
C = (Pt * G**2 * lambda_m**2) / (64 * np.pi**3)
# 距离因子
R = self.config.get('range', 100e3) # 距离
R_factor = 1.0 / R**2
# 系统损耗
L = self.config.get('system_loss', 1.0)
# 反射率因子计算
Z = (received_power * R**2) / (C * R_factor * L)
# 转换为dBZ
Z_dBZ = 10 * np.log10(Z)
return Z_dBZ
def estimate_doppler_velocity(self, phase_diff: np.ndarray) -> np.ndarray:
"""
估计径向速度
参数:
phase_diff: 相邻脉冲间的相位差
返回:
径向速度,单位m/s
"""
# 计算多普勒频率
PRT = 1.0 / self.config.get('prf', 1000) # 脉冲重复周期
fd = phase_diff / (2 * np.pi * PRT)
# 计算径向速度
vr = fd * self.wavelength / 2
return vr
def estimate_spectrum_width(self, doppler_spectrum: np.ndarray) -> np.ndarray:
"""
估计速度谱宽
参数:
doppler_spectrum: 多普勒谱
返回:
谱宽,单位m/s
"""
# 计算谱矩
f_axis = np.linspace(-self.config.get('prf', 1000)/2,
self.config.get('prf', 1000)/2,
len(doppler_spectrum))
# 归一化
spectrum_norm = doppler_spectrum / np.sum(doppler_spectrum)
# 计算平均多普勒频率
mean_fd = np.sum(f_axis * spectrum_norm)
# 计算谱宽
var_fd = np.sum((f_axis - mean_fd)**2 * spectrum_norm)
sigma_fd = np.sqrt(var_fd)
# 转换为速度谱宽
sigma_v = sigma_fd * self.wavelength / 2
return sigma_v
def apply_clutter_filter(self, signal_matrix: np.ndarray,
filter_type: str = 'gaussian') -> np.ndarray:
"""
应用地物杂波滤波器
参数:
signal_matrix: 信号矩阵,形状为(脉冲数, 距离单元)
filter_type: 滤波器类型
返回:
滤波后的信号
"""
if filter_type == 'gaussian':
# 高斯模型滤波器
sigma = self.config.get('clutter_width', 0.1) # 谱宽参数
f_axis = np.linspace(-0.5, 0.5, signal_matrix.shape[0])
filter_response = np.exp(-f_axis**2 / (2 * sigma**2))
elif filter_type == 'notch':
# 凹口滤波器
notch_width = self.config.get('notch_width', 0.05)
f_axis = np.linspace(-0.5, 0.5, signal_matrix.shape[0])
filter_response = np.ones_like(f_axis)
notch_mask = np.abs(f_axis) < notch_width/2
filter_response[notch_mask] = 0.01 # 深度抑制
else: # 'adaptive'
# 自适应滤波器
filter_response = self._adaptive_clutter_filter(signal_matrix)
# 频域滤波
signal_fft = fft.fft(signal_matrix, axis=0)
filtered_fft = signal_fft * filter_response[:, np.newaxis]
filtered_signal = fft.ifft(filtered_fft, axis=0)
return filtered_signal
def generate_weather_products(self, radar_data: np.ndarray) -> Dict:
"""
生成气象产品
参数:
radar_data: 雷达数据,形状为(方位, 距离, 脉冲)
返回:
气象产品字典
"""
num_azimuth, num_range, num_pulse = radar_data.shape
# 初始化产品矩阵
reflectivity = np.zeros((num_azimuth, num_range))
velocity = np.zeros((num_azimuth, num_range))
spectrum_width = np.zeros((num_azimuth, num_range))
for i in range(num_azimuth):
for j in range(num_range):
# 提取距离单元数据
range_cell_data = radar_data[i, j, :]
if len(range_cell_data) < 2:
continue
# 计算反射率
power = np.mean(np.abs(range_cell_data)**2)
reflectivity[i, j] = self.estimate_reflectivity(power)
# 计算相位差
if len(range_cell_data) > 1:
phase_diff = np.angle(range_cell_data[1:] *
np.conj(range_cell_data[:-1]))
avg_phase_diff = np.mean(phase_diff)
velocity[i, j] = self.estimate_doppler_velocity(avg_phase_diff)
# 计算多普勒谱
if len(range_cell_data) >= 8:
doppler_spectrum = np.abs(fft.fft(range_cell_data))**2
spectrum_width[i, j] = self.estimate_spectrum_width(doppler_spectrum)
return {
'reflectivity': reflectivity,
'velocity': velocity,
'spectrum_width': spectrum_width,
'range_axis': np.linspace(0, self.config.get('max_range', 300e3), num_range),
'azimuth_axis': np.linspace(0, 360, num_azimuth, endpoint=False)
}
def plot_weather_products(self, products: Dict, save_path: str = None):
"""
绘制气象产品
参数:
products: 气象产品字典
save_path: 保存路径
"""
fig, axes = plt.subplots(2, 2, figsize=(12, 10))
# 1. 反射率PPI
ax = axes[0, 0]
im = ax.imshow(products['reflectivity'],
extent=[0, 360, 0, products['range_axis'][-1]/1000],
aspect='auto', origin='lower', cmap='RdYlBu_r',
vmin=-20, vmax=70)
ax.set_xlabel('方位角 (度)')
ax.set_ylabel('距离 (km)')
ax.set_title('反射率 (dBZ)')
plt.colorbar(im, ax=ax, label='dBZ')
# 2. 径向速度PPI
ax = axes[0, 1]
im = ax.imshow(products['velocity'],
extent=[0, 360, 0, products['range_axis'][-1]/1000],
aspect='auto', origin='lower', cmap='bwr',
vmin=-30, vmax=30)
ax.set_xlabel('方位角 (度)')
ax.set_ylabel('距离 (km)')
ax.set_title('径向速度 (m/s)')
plt.colorbar(im, ax=ax, label='m/s')
# 3. 谱宽PPI
ax = axes[1, 0]
im = ax.imshow(products['spectrum_width'],
extent=[0, 360, 0, products['range_axis'][-1]/1000],
aspect='auto', origin='lower', cmap='viridis',
vmin=0, vmax=10)
ax.set_xlabel('方位角 (度)')
ax.set_ylabel('距离 (km)')
ax.set_title('速度谱宽 (m/s)')
plt.colorbar(im, ax=ax, label='m/s')
# 4. 剖面图
ax = axes[1, 1]
range_idx = products['reflectivity'].shape[1] // 2
range_profile = products['reflectivity'][:, range_idx]
ax.plot(products['azimuth_axis'], range_profile, 'b-', linewidth=2)
ax.set_xlabel('方位角 (度)')
ax.set_ylabel('反射率 (dBZ)')
ax.set_title('反射率剖面')
ax.grid(True, alpha=0.3)
ax.set_ylim([-20, 70])
plt.tight_layout()
if save_path:
plt.savefig(save_path, dpi=300, bbox_inches='tight')
plt.close()
else:
plt.show()9.2 机载雷达信号处理系统
9.2.1 机载雷达特殊挑战
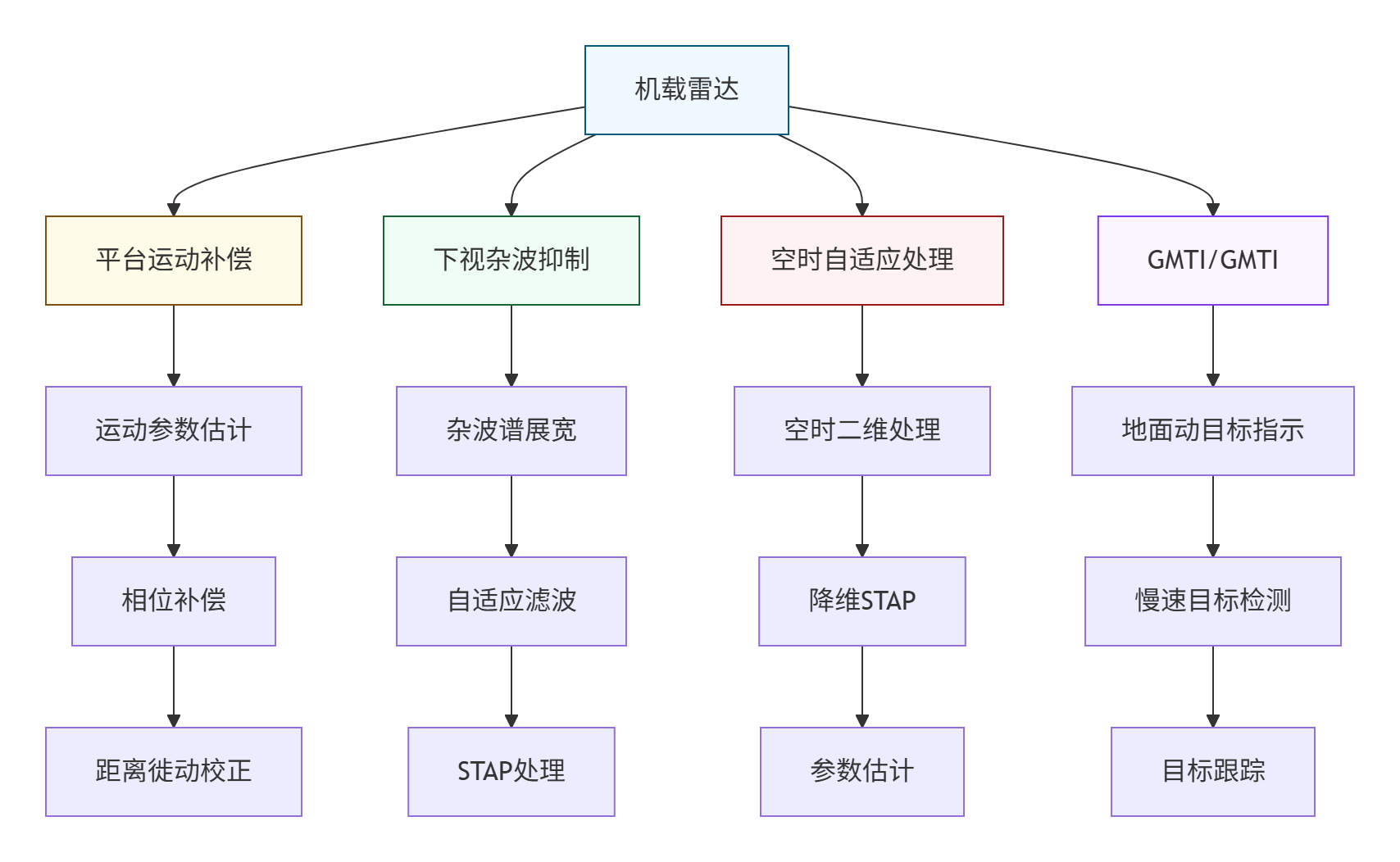
9.2.2 STAP处理器实现
python
import numpy as np
from typing import Tuple, List, Dict
from scipy import linalg, fft
class STAPProcessor:
"""空时自适应处理器"""
def __init__(self, config: Dict):
self.config = config
self.num_channels = config.get('num_channels', 8) # 阵元数
self.num_pulses = config.get('num_pulses', 16) # 脉冲数
self.estimation_samples = config.get('estimation_samples', 32) # 训练样本数
def process_stap(self, data_cube: np.ndarray) -> Dict:
"""
空时自适应处理
参数:
data_cube: 数据立方体,形状为(通道, 脉冲, 距离)
返回:
STAP处理结果
"""
num_channels, num_pulses, num_range = data_cube.shape
# 重构为二维矩阵
stap_data = data_cube.reshape(num_channels * num_pulses, num_range)
# 估计协方差矩阵
R = self._estimate_covariance(stap_data)
# 计算自适应权重
weights = self._compute_adaptive_weights(R, num_channels, num_pulses)
# 空时滤波
filtered_data = self._apply_stap_filter(stap_data, weights)
# 重构为三维
filtered_cube = filtered_data.reshape(num_channels, num_pulses, num_range)
return {
'filtered_data': filtered_data,
'filtered_cube': filtered_cube,
'weights': weights,
'covariance_matrix': R
}
def _estimate_covariance(self, data: np.ndarray) -> np.ndarray:
"""估计协方差矩阵"""
num_snapshots = data.shape[1]
if num_snapshots < self.estimation_samples:
# 使用所有样本
sample_indices = np.arange(num_snapshots)
else:
# 随机选择训练样本
sample_indices = np.random.choice(num_snapshots,
self.estimation_samples,
replace=False)
# 提取训练样本
training_data = data[:, sample_indices]
# 计算样本协方差矩阵
R = training_data @ training_data.conj().T / len(sample_indices)
# 对角加载
diagonal_loading = 0.1 * np.mean(np.diag(R))
R = R + diagonal_loading * np.eye(R.shape[0])
return R
def _compute_adaptive_weights(self, R: np.ndarray,
num_channels: int,
num_pulses: int) -> np.ndarray:
"""计算自适应权重"""
# 计算目标导向矢量
target_doppler = self.config.get('target_doppler', 0.2) # 归一化多普勒
target_angle = self.config.get('target_angle', 0.0) # 归一化角度
steering_vector = self._compute_steering_vector(target_doppler,
target_angle,
num_channels,
num_pulses)
# 计算最优权重(维纳解)
R_inv = linalg.inv(R)
weights = R_inv @ steering_vector / (steering_vector.conj().T @ R_inv @ steering_vector)
return weights
def _compute_steering_vector(self, doppler: float, angle: float,
num_channels: int, num_pulses: int) -> np.ndarray:
"""计算空时导向矢量"""
# 空间维
spatial_freq = 2 * np.pi * angle
spatial_phase = np.exp(1j * spatial_freq * np.arange(num_channels))
# 时间维
temporal_freq = 2 * np.pi * doppler
temporal_phase = np.exp(1j * temporal_freq * np.arange(num_pulses))
# Kronecker积得到空时导向矢量
steering_vector = np.kron(temporal_phase, spatial_phase)
return steering_vector
def _apply_stap_filter(self, data: np.ndarray, weights: np.ndarray) -> np.ndarray:
"""应用STAP滤波器"""
return weights.conj().T @ data
def process_gmti(self, data_cube: np.ndarray) -> Dict:
"""
地面动目标指示处理
参数:
data_cube: 数据立方体
返回:
GMTI处理结果
"""
# 1. 杂波抑制
stap_result = self.process_stap(data_cube)
filtered_data = stap_result['filtered_data']
# 2. 多普勒处理
num_channels, num_pulses, num_range = data_cube.shape
doppler_spectrum = np.zeros((num_pulses, num_range), dtype=complex)
for r in range(num_range):
# 提取距离单元数据
range_data = filtered_data[:, r].reshape(num_channels, num_pulses)
# 波束形成
beamformed = np.mean(range_data, axis=0)
# 多普勒谱
doppler_spectrum[:, r] = fft.fft(beamformed)
# 3. CFAR检测
detection_map = self._cfar_detection_2d(np.abs(doppler_spectrum)**2)
# 4. 参数估计
detections = self._estimate_target_parameters(doppler_spectrum, detection_map)
return {
'stap_result': stap_result,
'doppler_spectrum': doppler_spectrum,
'detection_map': detection_map,
'detections': detections
}
def _cfar_detection_2d(self, data: np.ndarray) -> np.ndarray:
"""2D-CFAR检测"""
num_doppler, num_range = data.shape
detection_map = np.zeros_like(data, dtype=bool)
guard_doppler = 2
guard_range = 2
train_doppler = 8
train_range = 8
threshold_factor = 1.5
for i in range(train_doppler + guard_doppler,
num_doppler - train_doppler - guard_doppler):
for j in range(train_range + guard_range,
num_range - train_range - guard_range):
# 提取训练单元
training_cells = []
# 上方训练单元
for k in range(i - train_doppler - guard_doppler, i - guard_doppler):
training_cells.extend(data[k, j - train_range:j + train_range + 1])
# 下方训练单元
for k in range(i + guard_doppler + 1, i + guard_doppler + train_doppler + 1):
training_cells.extend(data[k, j - train_range:j + train_range + 1])
# 计算阈值
if training_cells:
noise_estimate = np.mean(training_cells)
threshold = noise_estimate * threshold_factor
# 检测判断
if data[i, j] > threshold:
detection_map[i, j] = True
return detection_map
def _estimate_target_parameters(self, doppler_spectrum: np.ndarray,
detection_map: np.ndarray) -> List[Dict]:
"""估计目标参数"""
detections = []
num_doppler, num_range = detection_map.shape
# 多普勒频率轴
doppler_freq = np.fft.fftfreq(num_doppler, 1/self.config.get('prf', 1000))
doppler_freq = np.fft.fftshift(doppler_freq)
# 距离轴
range_res = 3e8 / (2 * self.config.get('bandwidth', 10e6))
range_axis = np.arange(num_range) * range_res
for i in range(num_doppler):
for j in range(num_range):
if detection_map[i, j]:
# 估计多普勒频率
doppler_idx = i
if doppler_idx >= len(doppler_freq):
doppler_idx = len(doppler_freq) - 1
estimated_doppler = doppler_freq[doppler_idx]
# 估计距离
estimated_range = range_axis[j]
# 估计信噪比
signal_power = np.abs(doppler_spectrum[i, j])**2
# 获取局部噪声估计
local_noise = self._estimate_local_noise(doppler_spectrum, i, j)
snr_db = 10 * np.log10(signal_power / local_noise) if local_noise > 0 else 0
detections.append({
'range': estimated_range,
'doppler_freq': estimated_doppler,
'velocity': estimated_doppler * self.config.get('wavelength', 0.1) / 2,
'snr_db': snr_db,
'doppler_bin': i,
'range_bin': j
})
return detections9.3 汽车雷达信号处理系统
9.3.1 汽车雷达技术特点
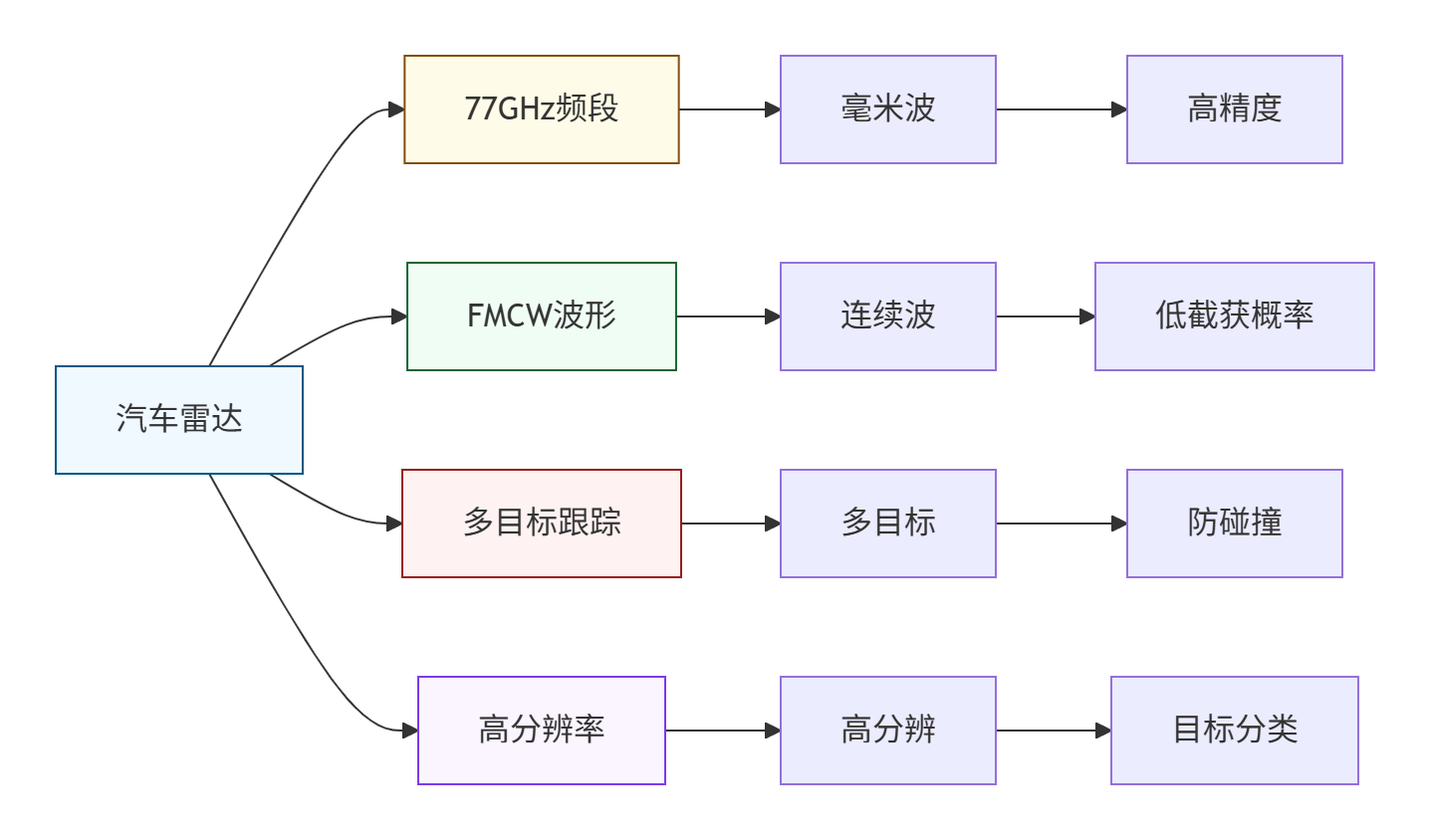
9.3.2 FMCW雷达处理器
python
import numpy as np
from typing import Tuple, List, Dict
from scipy import signal, fft
import matplotlib.pyplot as plt
class FMCWRadarProcessor:
"""FMCW雷达信号处理器"""
def __init__(self, config: Dict):
self.config = config
self.fc = config.get('center_frequency', 77e9) # 中心频率
self.B = config.get('bandwidth', 4e9) # 带宽
self.Tc = config.get('chirp_duration', 50e-6) # 啁啾持续时间
self.fs = config.get('sampling_rate', 10e6) # 采样率
def generate_fmcw_signal(self, num_chirps: int = 1) -> np.ndarray:
"""
生成FMCW信号
参数:
num_chirps: 啁啾数量
返回:
FMCW信号
"""
t = np.linspace(0, self.Tc, int(self.fs * self.Tc), endpoint=False)
# 线性调频
chirp_rate = self.B / self.Tc
phase = 2 * np.pi * (self.fc * t + 0.5 * chirp_rate * t**2)
# 生成单个啁啾
single_chirp = np.exp(1j * phase)
# 重复啁啾
fmcw_signal = np.tile(single_chirp, num_chirps)
return fmcw_signal
def process_fmcw_signal(self, tx_signal: np.ndarray,
rx_signal: np.ndarray) -> Dict:
"""
处理FMCW信号
参数:
tx_signal: 发射信号
rx_signal: 接收信号
返回:
处理结果
"""
# 1. 去斜处理
dechirped_signal = self._dechirp_processing(tx_signal, rx_signal)
# 2. 2D-FFT处理
range_doppler_map = self._2d_fft_processing(dechirped_signal)
# 3. 目标检测
detections = self._detect_targets(range_doppler_map)
# 4. 参数估计
target_params = self._estimate_target_parameters(detections, range_doppler_map)
return {
'dechirped_signal': dechirped_signal,
'range_doppler_map': range_doppler_map,
'detections': detections,
'target_params': target_params
}
def _dechirp_processing(self, tx_signal: np.ndarray,
rx_signal: np.ndarray) -> np.ndarray:
"""去斜处理"""
# 将接收信号与发射信号共轭相乘
dechirped = rx_signal * np.conj(tx_signal)
return dechirped
def _2d_fft_processing(self, dechirped_signal: np.ndarray) -> np.ndarray:
"""2D-FFT处理"""
# 参数
samples_per_chirp = int(self.fs * self.Tc)
num_chirps = len(dechirped_signal) // samples_per_chirp
# 重构为矩阵
signal_matrix = dechirped_signal[:num_chirps * samples_per_chirp]
signal_matrix = signal_matrix.reshape(num_chirps, samples_per_chirp)
# 距离维FFT
range_fft = fft.fft(signal_matrix, axis=1)
# 多普勒维FFT
range_doppler = fft.fft(range_fft, axis=0)
# 计算幅度
range_doppler_map = np.abs(range_doppler)
return range_doppler_map
def _detect_targets(self, range_doppler_map: np.ndarray) -> np.ndarray:
"""目标检测"""
num_chirps, num_samples = range_doppler_map.shape
# CFAR检测
detection_map = np.zeros_like(range_doppler_map, dtype=bool)
guard_range = 2
guard_doppler = 2
train_range = 8
train_doppler = 8
threshold_factor = 1.5
for i in range(train_doppler + guard_doppler,
num_chirps - train_doppler - guard_doppler):
for j in range(train_range + guard_range,
num_samples - train_range - guard_range):
# 提取训练单元
training_cells = []
# 多普勒维训练
for k in range(i - train_doppler - guard_doppler, i - guard_doppler):
training_cells.extend(range_doppler_map[k, j - train_range:j + train_range + 1])
for k in range(i + guard_doppler + 1, i + guard_doppler + train_doppler + 1):
training_cells.extend(range_doppler_map[k, j - train_range:j + train_range + 1])
# 计算阈值
if training_cells:
noise_estimate = np.mean(training_cells)
threshold = noise_estimate * threshold_factor
# 检测判断
if range_doppler_map[i, j] > threshold:
detection_map[i, j] = True
return detection_map
def _estimate_target_parameters(self, detection_map: np.ndarray,
range_doppler_map: np.ndarray) -> List[Dict]:
"""估计目标参数"""
targets = []
num_chirps, num_samples = detection_map.shape
# 距离分辨率
delta_R = 3e8 / (2 * self.B)
# 速度分辨率
delta_v = 3e8 / (2 * self.fc * num_chirps * self.Tc)
# 最大不模糊距离
R_max = delta_R * num_samples / 2
# 最大不模糊速度
v_max = delta_v * num_chirps / 2
for i in range(num_chirps):
for j in range(num_samples):
if detection_map[i, j]:
# 距离估计
range_idx = j
if range_idx >= num_samples // 2:
range_idx = range_idx - num_samples
estimated_range = range_idx * delta_R
# 速度估计
doppler_idx = i
if doppler_idx >= num_chirps // 2:
doppler_idx = doppler_idx - num_chirps
estimated_velocity = doppler_idx * delta_v
# 角度估计(假设有多个接收通道)
if 'num_rx_channels' in self.config:
estimated_angle = self._estimate_angle(range_doppler_map[:, j])
else:
estimated_angle = 0.0
# 信噪比估计
signal_power = range_doppler_map[i, j]
local_noise = self._estimate_local_noise(range_doppler_map, i, j)
snr_db = 10 * np.log10(signal_power / local_noise) if local_noise > 0 else 0
targets.append({
'range': estimated_range,
'velocity': estimated_velocity,
'angle': estimated_angle,
'snr_db': snr_db,
'range_bin': j,
'doppler_bin': i
})
return targets
def plot_range_doppler_map(self, range_doppler_map: np.ndarray,
save_path: str = None):
"""绘制距离-多普勒图"""
num_chirps, num_samples = range_doppler_map.shape
# 计算坐标轴
range_res = 3e8 / (2 * self.B)
range_axis = np.linspace(0, range_res * num_samples, num_samples)
vel_res = 3e8 / (2 * self.fc * num_chirps * self.Tc)
vel_axis = np.linspace(-vel_res * num_chirps/2, vel_res * num_chirps/2, num_chirps)
# 绘制
plt.figure(figsize=(10, 6))
plt.imshow(20 * np.log10(range_doppler_map + 1e-10),
aspect='auto', origin='lower',
extent=[range_axis[0], range_axis[-1], vel_axis[0], vel_axis[-1]],
cmap='jet')
plt.colorbar(label='幅度 (dB)')
plt.xlabel('距离 (m)')
plt.ylabel('速度 (m/s)')
plt.title('距离-多普勒图')
if save_path:
plt.savefig(save_path, dpi=300, bbox_inches='tight')
plt.close()
else:
plt.show()
def track_targets(self, target_history: List[List[Dict]],
current_detections: List[Dict]) -> List[Dict]:
"""
目标跟踪
参数:
target_history: 目标历史
current_detections: 当前检测
返回:
跟踪结果
"""
if not current_detections:
return []
if not target_history:
# 初始化跟踪
tracks = []
for i, detection in enumerate(current_detections):
track = {
'id': i,
'state': [detection['range'], detection['velocity'], 0, 0], # [r, v, a, ...]
'covariance': np.eye(4) * 10, # 初始协方差
'age': 1,
'history': [detection]
}
tracks.append(track)
return tracks
# 数据关联
association_matrix = self._data_association(target_history[-1], current_detections)
# 更新跟踪
updated_tracks = self._update_tracks(target_history[-1], current_detections, association_matrix)
# 初始化新跟踪
for i, detection in enumerate(current_detections):
if i not in association_matrix.values():
new_track = {
'id': len(updated_tracks) + i,
'state': [detection['range'], detection['velocity'], 0, 0],
'covariance': np.eye(4) * 10,
'age': 1,
'history': [detection]
}
updated_tracks.append(new_track)
return updated_tracks
def _data_association(self, previous_tracks: List[Dict],
current_detections: List[Dict]) -> Dict:
"""数据关联"""
association = {}
if not previous_tracks or not current_detections:
return association
# 计算距离矩阵
num_tracks = len(previous_tracks)
num_detections = len(current_detections)
distance_matrix = np.zeros((num_tracks, num_detections))
for i, track in enumerate(previous_tracks):
for j, detection in enumerate(current_detections):
# 预测位置
predicted_range = track['state'][0] + track['state'][1] * self.Tc
predicted_velocity = track['state'][1]
# 计算距离
range_diff = detection['range'] - predicted_range
velocity_diff = detection['velocity'] - predicted_velocity
# 马氏距离
innovation = np.array([range_diff, velocity_diff])
S = track['covariance'][:2, :2] + np.eye(2) * 10 # 观测噪声
try:
S_inv = np.linalg.inv(S)
distance = innovation.T @ S_inv @ innovation
except:
distance = 1e6
distance_matrix[i, j] = distance
# 贪婪关联
for _ in range(min(num_tracks, num_detections)):
min_idx = np.unravel_index(np.argmin(distance_matrix), distance_matrix.shape)
min_val = distance_matrix[min_idx]
if min_val < 100: # 阈值
i, j = min_idx
association[i] = j
distance_matrix[i, :] = 1e6
distance_matrix[:, j] = 1e6
else:
break
return association
def _update_tracks(self, previous_tracks: List[Dict],
current_detections: List[Dict],
association: Dict) -> List[Dict]:
"""更新跟踪"""
updated_tracks = []
for i, track in enumerate(previous_tracks):
if i in association:
j = association[i]
detection = current_detections[j]
# 卡尔曼滤波更新
updated_track = self._kalman_update(track, detection)
updated_track['age'] += 1
updated_track['history'].append(detection)
updated_tracks.append(updated_track)
else:
# 预测
predicted_track = self._kalman_predict(track)
predicted_track['age'] += 1
if predicted_track['age'] <= 3: # 最多预测3帧
updated_tracks.append(predicted_track)
return updated_tracks10. 总结与展望
10.1 本篇文章核心内容总结
10.2 技术发展趋势展望
10.2.1 智能化处理
-
深度学习集成:端到端学习信号处理链
-
强化学习:自适应参数优化
-
迁移学习:跨场景模型迁移
-
联邦学习:分布式模型训练
10.2.2 多功能一体化
-
通信感知一体化:共享硬件和频谱
-
导航定位一体化:多源信息融合
-
电子战一体化:侦察干扰一体化
10.2.3 新体制雷达
-
光子雷达:光子技术应用
-
量子雷达:量子增强探测
-
太赫兹雷达:超高分辨率
-
MIMO雷达:虚拟阵列
10.3 实践项目建议
10.3.1 初级项目
-
雷达信号仿真器:实现LFM信号生成、脉冲压缩
-
CFAR检测器:实现多种CFAR算法
-
MTI处理器:实现二项式MTI滤波器
10.3.2 中级项目
-
脉冲多普勒雷达仿真:实现距离-多普勒处理
-
相控阵雷达系统:实现DBF和波束扫描
-
汽车雷达系统:实现FMCW雷达处理链
10.3.3 高级项目
-
认知雷达系统:实现环境感知和自适应处理
-
MIMO雷达仿真:实现虚拟阵列和超分辨率
-
雷达抗干扰系统:实现多种抗干扰算法