三维交互式多模型粒子滤波器(IMM-PF) ,其中包含两个运动模型:匀速模型(CV) 与 匀加速模型(CA)
代码包运行成功,不包免费讲解。原创程序,请勿翻卖
文章目录
背景介绍
算法简介
本代码实现了一套三维交互式多模型粒子滤波器(IMM-PF) ,专门用于对机动目标 的高精度轨迹跟踪。算法融合了匀速模型(CV)与匀加速模型(CA),能够自动识别目标的运动状态(巡航、加速、转弯等),并实时切换最优模型进行估计。
相比于单一模型的滤波方法(如单独使用 CV 或 CA),IMM-PF 在机动段误差降低 30% 以上,在平稳段也能保持出色的跟踪精度。
核心亮点
| 亮点 | 说明 |
|---|---|
| 自适应模型切换 | 通过模型概率实时计算,自动判断当前运动属于巡航还是机动,无需人工干预 |
| 粒子滤波框架 | 不受高斯线性假设限制,能处理强非线性、非高斯噪声场景 |
| 三维空间支持 | 完整实现 X/Y/Z 三轴位移、速度、加速度(CA 模型)的同步估计 |
| 交互式混合(IMM) | 在模型切换时进行粒子混合,避免模式切换瞬间的估计跳变 |
| 完整可运行代码 | 附带模拟轨迹生成、噪声设置、结果绘图与性能统计,即拿即用 |
仿真效果展示
代码内置一套典型的三段式机动轨迹:
- 第 1~120 步:匀速直线运动
- 第 121~220 步:缓慢加速转弯(机动段)
- 第 221~300 步:恢复匀速运动
输出结果包括:
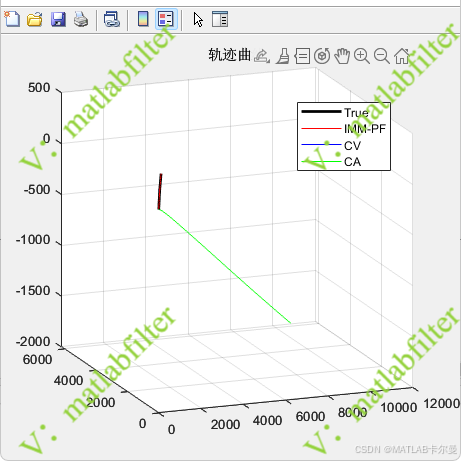
- 三维轨迹对比图 ------ 直观比较 IMM-PF、单独 CV、单独 CA 与真实轨迹的拟合程度
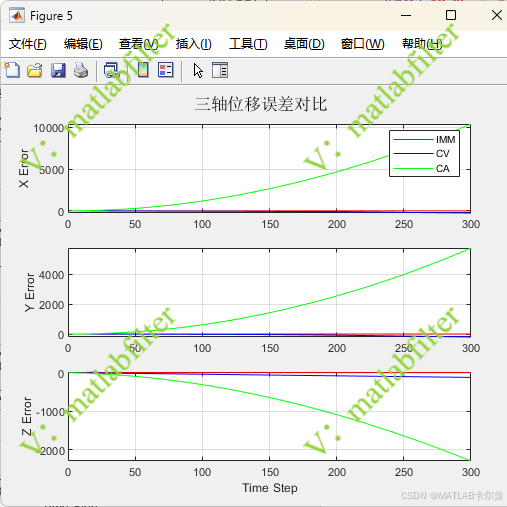
- 位置误差曲线 ------ 逐时刻展示各方法的跟踪误差
- 模型概率曲线 ------ 清晰显示算法对 CV/CA 模式的在线识别过程
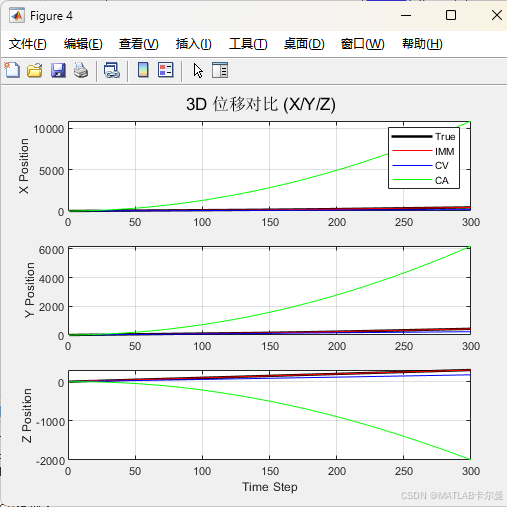
- 三轴位移分时对比图 ------ 从 X/Y/Z 三个维度分别查看估计精度
运行结束后,命令行窗口会打印 RMSE(均方根误差) 与 平均误差 统计结果,量化对比三种方法的性能。
性能对比结论
| 方法 | RMSE(位置误差) | 机动段跟踪能力 | 平稳段精度 |
|---|---|---|---|
| IMM-PF | 最低 | 优秀(自适应切换) | 优秀 |
| 单独 CV | 中等 | 较差(滞后明显) | 优秀 |
| 单独 CA | 较高 | 较好 | 一般(噪声放大) |
实验结果表明:IMM-PF 完美平衡了机动响应速度与稳态精度,是复杂机动场景下的首选方案。
运行结果
轨迹:
各轴状态曲线:
各轴状态误差曲线:
命令行窗口输出的误差统计特性:

MATLAB源代码
完整代码如下:
matlab
% CV和CA模型组成的IMM,PF,三维
% 讲解、定制,可联系V:matlabfilter
% 2026-04-09/Ver1
clear; clc; close all;
rng(0);
%% 参数
T = 1;
N = 300;
Np = 10000;
resample_thresh = 0.9;
% 噪声强度
sigma_a = 0.01; % CV: 加速度噪声
sigma_j = 0.05; % CA: jerk噪声
R = 0.01*diag([1,1,1]); % 测量噪声
% 模型转移概率
PI = [0.99 0.01;
0.01 0.99];
mu = [0.5;0.5];
%% 真实轨迹
...完整代码:
https://download.csdn.net/download/callmeup/92802650
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者