在通过两篇文章分别介绍了Modelica和Simscape后
要对Modelica与Simscape进行比较是一个非常宏大且触及系统仿真核心命题的问题。
总的来说,二者代表了两种截然不同的发展思路:
-
Simscape以控制引擎为核心的物理拓扑延伸。 -
Modelica以物理方程为核心的通用统一标准。
本文将从以下四个维度对二者进行对比:
- 发展历史
- 技术原理
- 生态建设
- 发展方向
1. 发展历史
首先回顾一下Modelica和Simscape的发展历史。
| 时间点 | Modelica | Simscape |
|---|---|---|
| 1970s | Modelica的前身-Dymola诞生。 | MATLAB诞生 |
| 1984 | - | MathWorks成立 |
| 1990 | - | Simulink 1.0 发布 |
| 1997 | Modelica 1.0 规范发布 | 推出 Stateflow(状态机建模) |
| 2000 | Modelica协会成立,开始维护Modelica 标准库 | |
| 2002-2008 | OpenModelica启动开源,Modelica规范更新2.0、3.0 | Simscape诞生并逐渐统一MathWorks旗下各专业物理库 |
| 2010 | FMI 1.0 标准发布 | Simscape 及其物理域工具箱逐步成熟 |
| 2012-2015 | Modelica 3.3发布,引入了状态机 (State Machines) 功能。 | Simscape与Simulink集成更加紧密 |
| 2022至今 | Modelica 3.6 发布;FMI 3.0 发布;大力推进 eFMI (嵌入式 FMI) 标准 | Simscape 深度整合 AI/代理模型 (Surrogate Models),全面支持FMI |
将二者的发展历史并列来看,可以发现其主要差异在于出发点:
- Modelica 始于物理方程,是自下而上的"升维重构", 即先用统一语言描述世界运转的物理规律,后续才在其中加入控制等其他功能。
- Simscape 是自上而下的降维补全, 因为MATLAB 着重于"数学计算",Simulink 着重于"控制算法",让控制闭环则需要Simscape建立被控对象的物理模型。
2. 技术原理
Modelica与Simscape使用equation-based(基于方程)的物理网络(Physical Network)建模方法,支持多领域物理系统(电气、机械、液压、热等)。
2.1 相同点
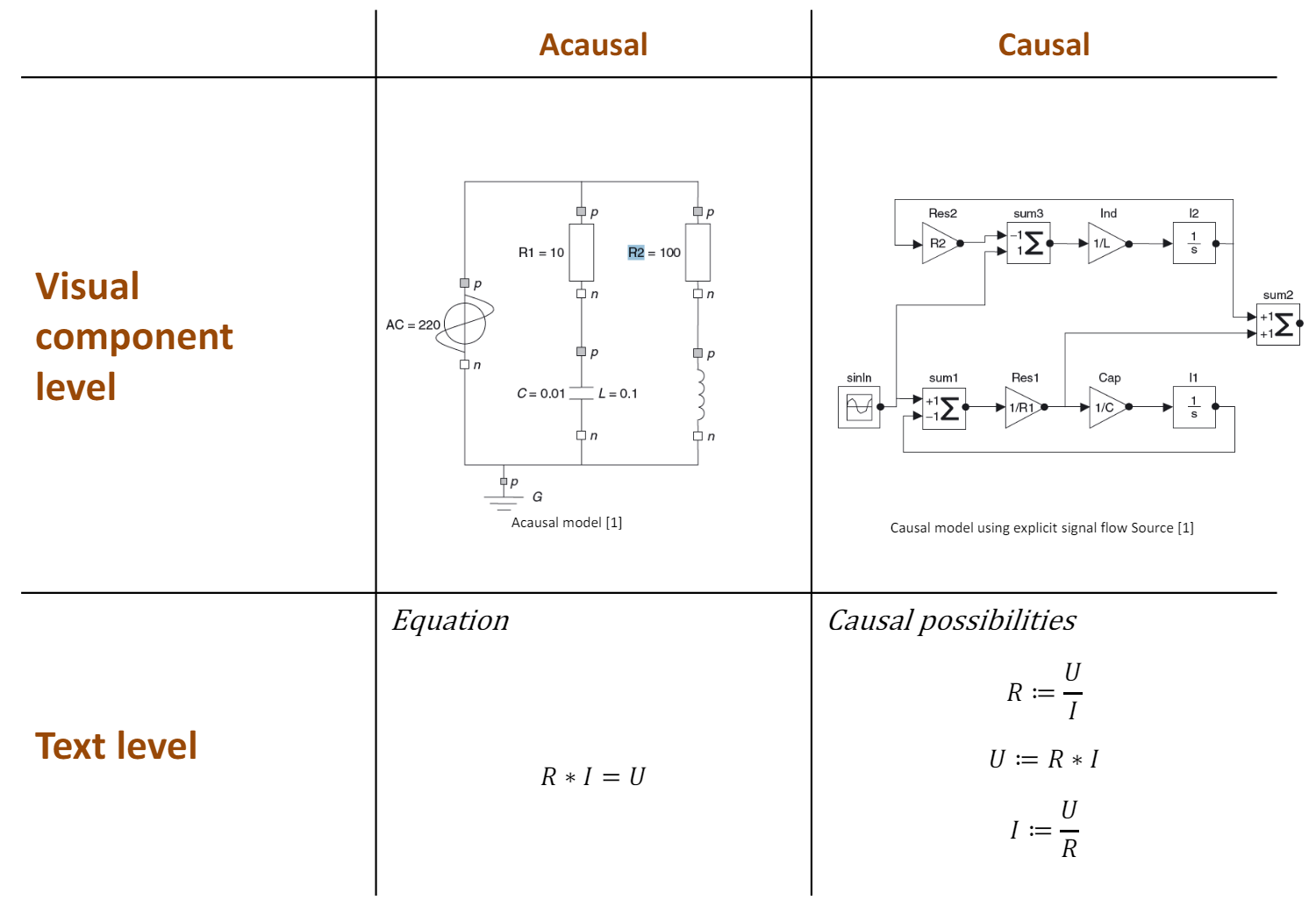
- 非因果建模思想 :Modelica与Simscape基于非因果建模(Acausal Modeling) 的思想。抛弃了控制系统中传统的"输入-计算-输出"单向信号流。它们都支持双向的能量或质量流传递,模型连线代表的是物理上的刚性连接或流体管路,而不是数学运算顺序。
- 基于广义基尔霍夫定律: 两者都使用跨变量 (Across variables,如电压、压差、速度差)和通变量 (Through variables,如电流、流量、力)来定义物理域接口。在节点处,自动应用基尔霍夫电流定律(穿透变量之和为零)和电压定律(并联跨变量相等)来提取系统的拓扑约束。
- 微分代数方程组 (DAE) 的生成: 无论是手写 Modelica 代码还是拖拽 Simscape 模块,系统最终都会根据组件内部的物理本构方程和外部的网络拓扑约束,联立生成一个庞大的非线性隐式微分代数方程组 (DAEs)。
- 面向对象的组件化: 都支持将基础的物理方程封装为可重用的模块(如一个液压缸、一个电阻),并通过端口 (Ports/Connectors) 与外部世界交互。
- 多领域与混合建模:支持跨域组件复用,可与因果控制算法混合。
2.2 不同点
建模范式与语言本质:
Modelica使用开放的声明式文本语言标准,直接编写方程,支持完整面向对象、多继承、重声明与层次化模型定义,模型完全独立于工具。Simscape以图形化物理网络为主,辅以受限的Simscape Language(用于自定义组件),本质上是Simulink库的扩展,建模高度依赖图形环境。
方程生成与符号处理:
Modelica工具(如 Dymola、OpenModelica)针对生成的 DAE 方程进行全局符号结构分析, 包括 index reduction、tearing、变量简化等复杂转换Simscape进行物理网络方程生成与结构整理,但不具有 Modelica 规范级别的全局指数约减等深度符号优化,过程完全内部化,对用户不透明,更多结构准备留给求解器调度处理。
简单来说就是Modelica在"编译时"干最重的活以换取求解速度。Simscape 把难题留给"运行时"的迭代算法。
求解器架构:
Modelica使用外部通用隐式求解器 (DASSL/CVODE)。由于方程已经被精简,Modelica模型常常能在较简陋的求解器下取得较高的求解效率。Simscape使用内部定制的求解器 (Simulink的ode15s / ode23t 家族)。这是MathWorks 最强护城河,这些黑盒算法处理原始隐式方程时的表。
代码封装及 C/C++ 实时部署能力:
Modelica通常导出带自带解算核的 FMU 黑盒 (Co-Simulation) 或需要外挂求解引擎 (Model Exchange)。上层目标机算力要求极高。Simscape支持原生离散化本地求解引擎。能在后台强制把复杂的连续方程网转化为离散方程步长(例如向后欧拉法),丢弃 DAE 引擎直译为极致轻量化的纯 C 实时代码。
3. 生态建设
这可能是Modelica与Simscape最大的区别,Modelica采用开放、非营利协会驱动模式,强调跨工具互操作与免费共享;Simscape采用商业闭源、单一厂商深度集成模式,依托成熟的 MATLAB/Simulink 商业生态。
| 维度 | Modelica | Simscape |
|---|---|---|
| 标准归属 | 由Modelica协会维护语言规范与标准库 | 由MathWorks完全控制产品路线 |
| 标准制定机制 | 成员公司与学术界共同参与技术委员会 | 企业内部产品规划主导 |
| 环境多样性 | 开源+商业,国内外有数十种独立的商业Modelica开发环境 | 仅限MATLAB/Simulink环境 |
| 标准库 | 由Modelica协会维护,完全开源 | 标准库由MathWorks独家维护与更新,无开源贡献机制。 |
| 扩展库 | 数百个不同领域的扩展库,可自由贡献与继承。 | 专业库同样由MathWorks独家维护与更新 |
| 社区与资源 | 全球会议、GitHub 活跃项目;OSMC 社区驱动等。 | 官方论坛、模型分享平台、教程等 |
| 跨平台标准 | FMI、SSP、eFMI 等多标准;模型可跨任意工具交换(FMU)。 | 支持 FMI导入/导出,但依赖 Simulink 生态;无独立标准维护权。 |
Modelica生态:高度开放、多厂商竞争、FMI 标准主导(270+ 工具互操作)、免费开源库与社区贡献,适合学术研究、长期模型交换与可持续生态建设。
Simscape生态:商业成熟度高、与 MATLAB/Simulink 一体化(控制、代码生成、HIL、实时仿真无缝)、丰富培训与企业支持,适合快速工业部署与控制工程闭环。
4. 发展方向
从未来发展方向来看,Modelica作为开放标准,重点在于标准持续演进、跨工具互操作与社区驱动的长期资产积累;Simscape 作为商业闭源产品,重点在于与 MATLAB/Simulink 生态深度融合的生成式 AI 工具化、企业级数字孪生与实时部署加速。
语言/标准演进
Modelica多标准协同推进,包括语言、库、互操作标准(FMI、SSP、eFMI、DCP)等的长期规划。FMI 及相关交换标准继续强化,将增强工具间协同与模型跨平台集成能力。
Simscape随MATLAB/Simulink发布周期推进,并不断扩展物理域库与工具链能力。支持标准化互操作(如 FMI 导入/导出),但本质仍嵌入 Simulink 生态。
AI/ML 集成
Modelica支持AI 辅助建模与混合优化(NeuralNetwork 3.0 库、SMArtInt 接口、FMUGym 强化学习);OpenScaling 项目推进 AI 参数校准;SSP 2.0 内置 AI/ML 参数优化支持。
Simscape支持生成式 AI(MATLAB Copilot / Simulink Copilot)深度集成建模、代码生成与优化;Embedded AI 部署到微控制器;物理+数据驱动混合数字孪生(PyTorch/TensorFlow 共执行);Software-Defined Vehicles(SDV)中 AI 预测维护与控制。
数字孪生与 MBSE
Modelica通过 FMI + SSP 实现分布式、大规模、可信数字孪生;支持 MBSE 全流程(Traceability Layered Standard 构建信任链)。
Simscape支持全生命周期数字孪生(概念-运维);物理(Simscape)+ AI 数据驱动混合;SDV 虚拟化平台与云规模实时孪生;MBSE 与 DevSecOps 管道无缝集成。
大规模系统与性能
Modelica关注大型模型的性能优化(如针对大规模 DAE 结构的编译优化、并行仿真等)。许多生态项目也在推进性能与可扩展性标准。
Simscape依托 Simulink 并行计算、云部署与实时求解器;重点中大规模控制+物理混合系统(HIL、边缘计算)。
部署与实时仿真
Modelica通过eFMI 增强嵌入式代码生成;实时仿真通过 FMI 跨工具支持。
Simscape依托 Simulink的原生优势:HIL、实时仿真、PLC/嵌入式硬件部署、自动化代码生成。
总结
在实际的工程应用和学术研究中,Simscape依托MathWorks多年的技术积累、海量的官方资源以及MATLAB/Simulink的普及程度,往往有着更加平滑的学习曲线。且工程落地效率高,适合企业内部统一工具链。
Modelica通过开源建立了一个充满潜力的生态,适合构建可复用的大型多物理域系统库与跨组织模型交换;在复杂约束系统和标准化生态协作方面更具优势。
在笔者看来,随着AI大模型、智能体的不断发展,人们不需要花费太多精力在学习和使用仿真软件这类工具上。因此,需要更多的考虑"做什么?",而不是"用什么"和"怎么做"。
所以不管是Modelica与Simscape还是别的什么仿真软件,选择的标准非常简单:对于学生来讲,当然是导师让用什么就用什么。对于打工人来说,当然是公司有什么就用什么。