AUTOSAR源码如下:
AUTOSAR-CP的程序流监控(PFM)源码资源-CSDN下载
关于AUTOSAR CP功能安全的程序流监控的原理如下:
程序流监控:AUTOSAR CP 功能安全在裸机 MCU 上的实现(理论篇)-CSDN博客
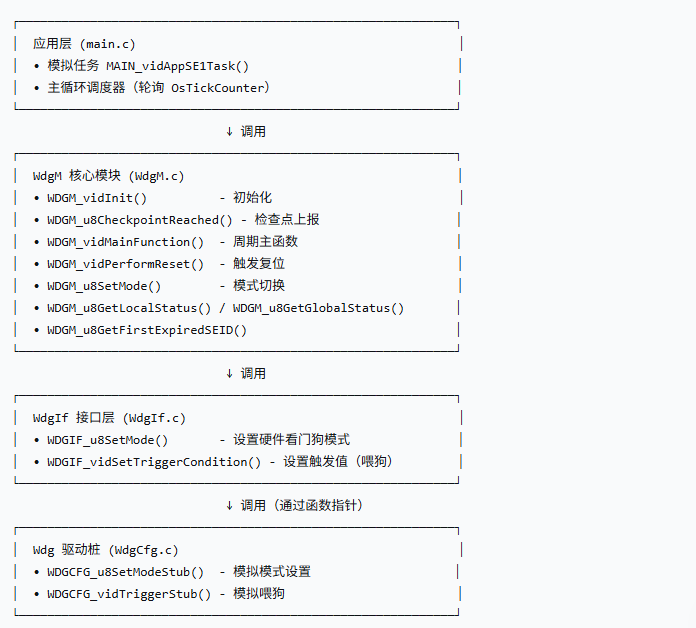
1. 代码整体架构
1.1 模块分层
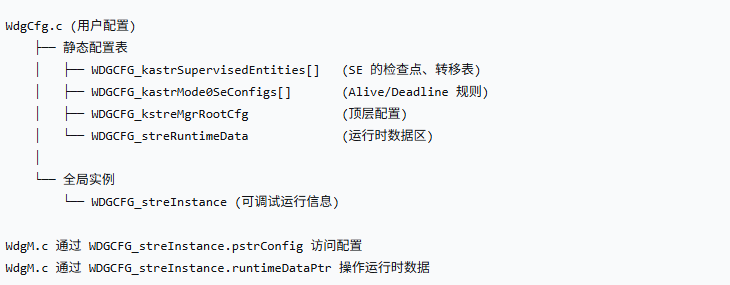
1.2 配置数据流(编译期 → 运行时)
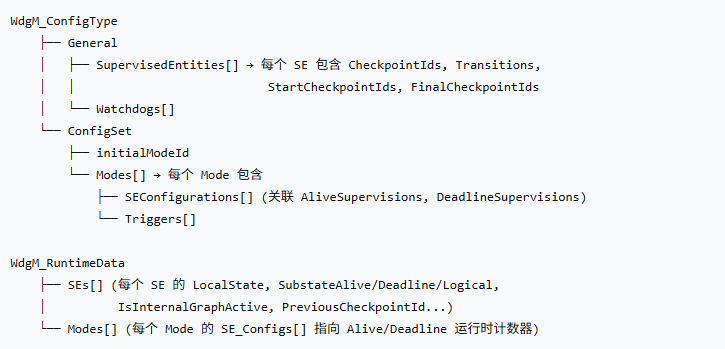
1.3 核心数据结构关系
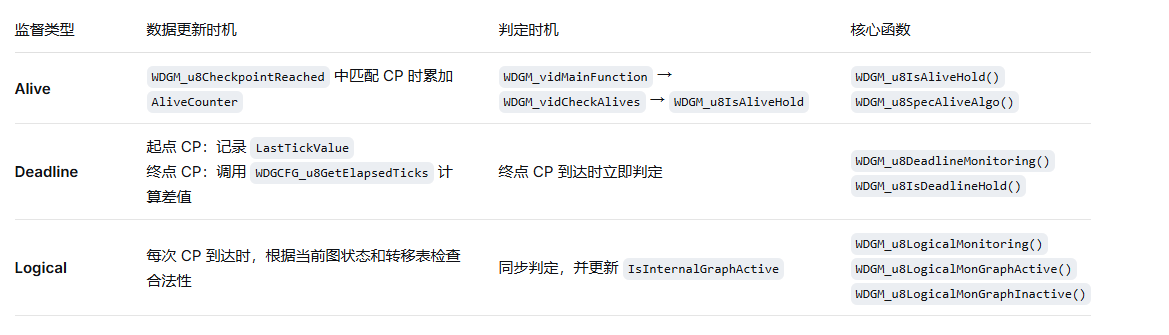
2. 监督机制的核心实现
2.1 三种监督的触发时机与判定函数
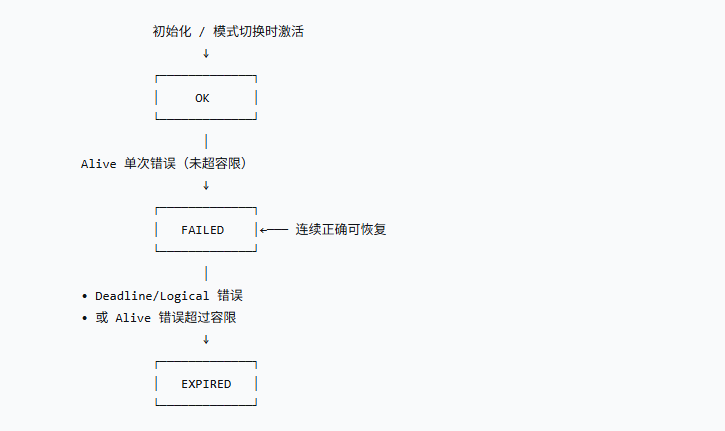
2.2 状态转换流程
(1)单个 SE 的局部状态机
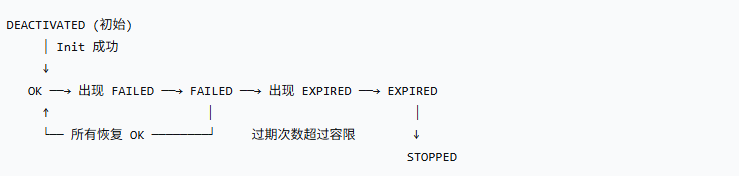
(2)全局状态机(汇总所有激活 SE)
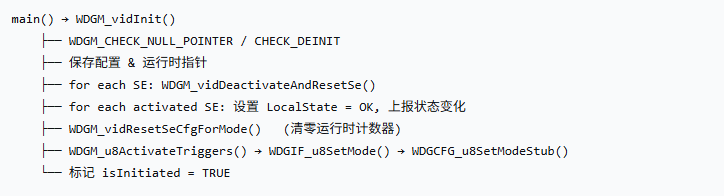
2.3 关键函数调用链
初始化链:
检查点上报链:
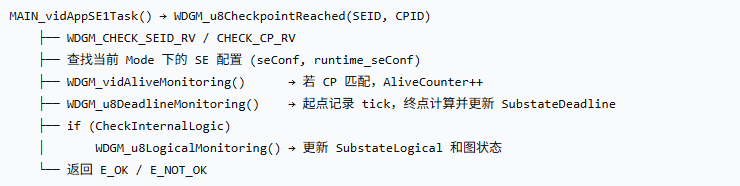
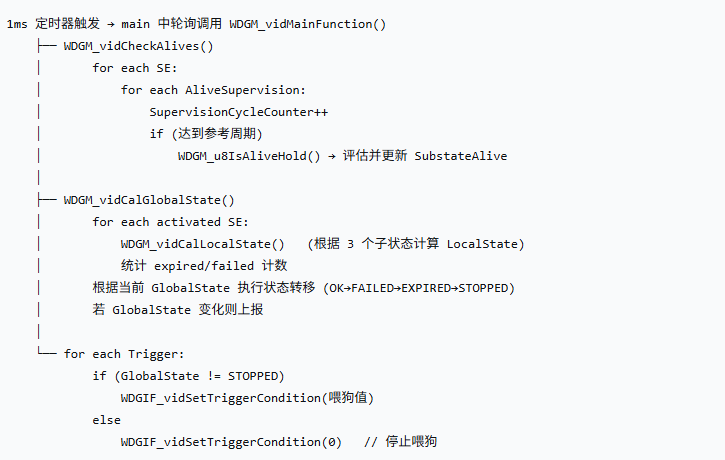
主周期处理链:
3. 主要技术难点与解决方案
3.1 裸机环境下的时间基准与调度
难点:无 RTOS,需要精确的 1ms、10ms 周期性调度。
解决方案:
-
使用硬件定时器产生 1ms 中断,在 ISR 中递增全局变量
WDGM_udteOsTickCounter。 -
主循环中采用绝对时间点比较实现非阻塞调度:
3.2 Alive 监督的相位对齐问题
现象:监督窗口与任务周期相位错位,导致一个窗口内统计到的 Alive 次数不稳定(有时多一次,有时少一次)。
解决方案:
-
将
SupervisionReferenceCycle设置为任务周期的整数倍(例如 10ms 任务 → 100ms 窗口)。 -
引入
MinMargin/MaxMargin允许合理偏差。 -
增加
FailedAliveSupervisionReferenceCycleTol容限,避免瞬时抖动导致立即过期。
3.3 Deadline 监督的起点覆盖漏洞
漏洞描述 :若程序在未到达终点前再次上报起点,原实现会直接覆盖 LastTickValue,导致终点计算的时间差异常大(起点被后移)。
解决方案 :引入状态机,每个 Deadline 监督项维护隐含状态(通过 LastTickValue 是否为 0 判断):
-
IDLE (
LastTickValue == 0):允许记录起点。 -
START_RECORDED (
LastTickValue != 0):-
若再次收到起点 → 视为非法,设置
SubstateDeadline = INCORRECT。 -
若收到终点 → 正常计算,完成后将
LastTickValue清零(回到 IDLE)。
-
代码体现 :在 WDGM_u8DeadlineMonitoring 中,仅当 LastTickValue == 0 时才记录起点;若已记录又收到起点,直接报错。
4. 项目结果
4.1 功能验证结果

4.2 可复用性
-
新增 SE 只需在
WdgCfg.c中添加配置数组,修改Length_宏。 -
支持多模式(通过增加
WdgM_Mode数组项)。 -
硬件驱动已抽象为函数指针,可替换为真实 FU7504 WDT 驱动。
5. 总结
本项目成功在裸机 MCU 上实现了 AUTOSAR CP 风格的轻量级程序流监控框架。通过合理裁剪和状态机设计,解决了裸机调度、相位对齐、时间戳管理等工程难题。最终交付了一套可配置、可调试、可扩展的 WdgM 模块,为功能安全软件监控提供了低成本、高可靠的基础组件。