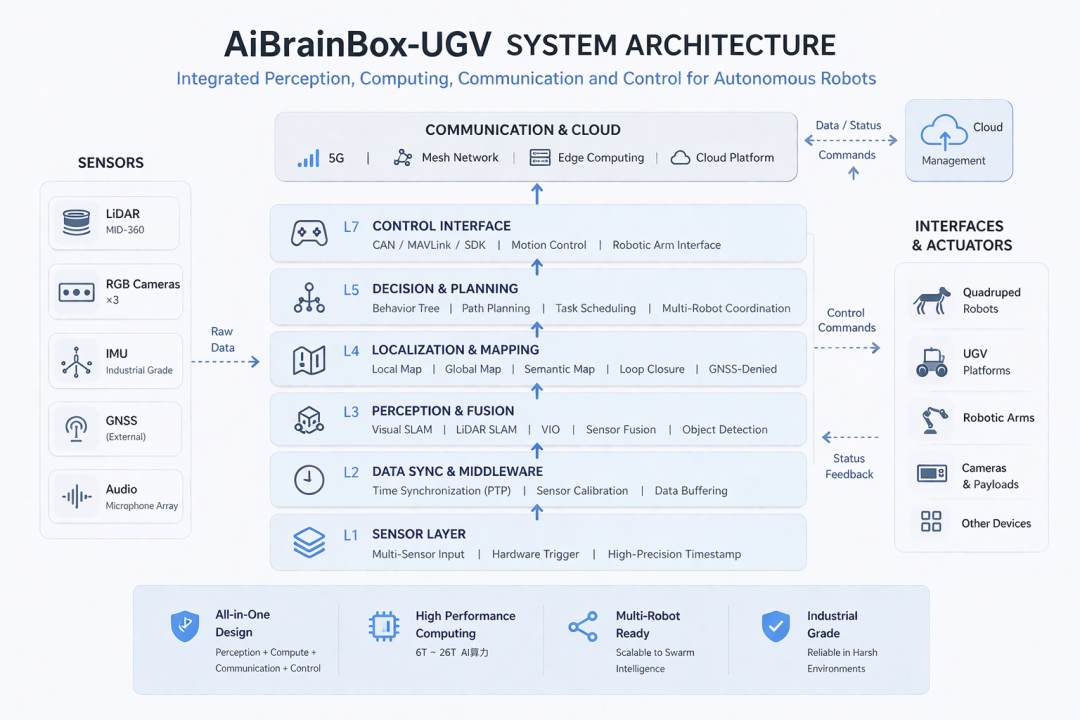
基于AiBrainBox-UGV的Smart RoBot系统架构&多Smart Robot协同架构:数据流 + 多机协同架构图
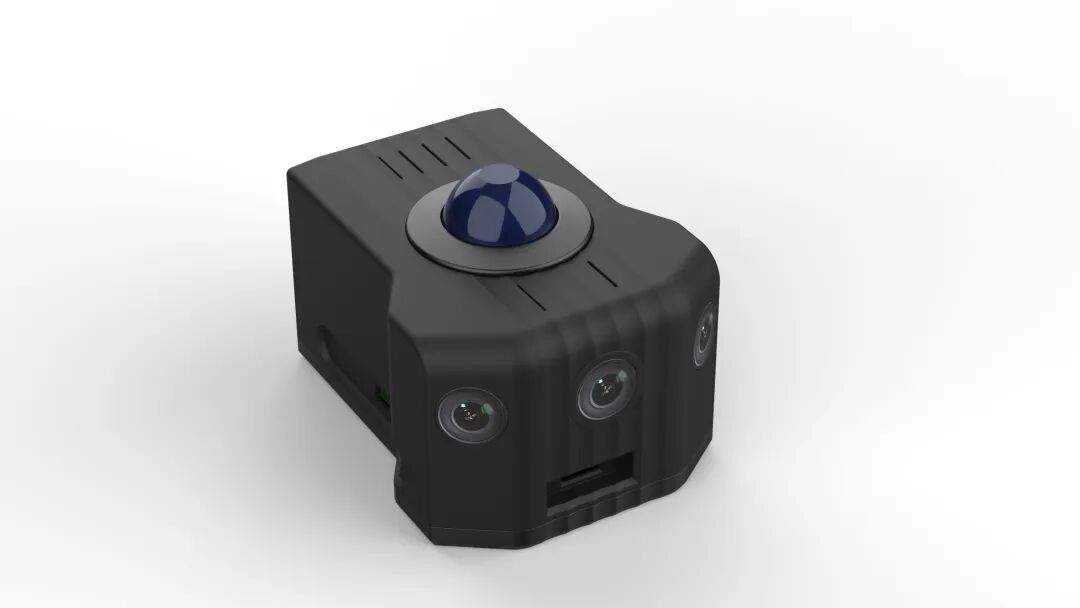
The Brain of Autonomous Robots
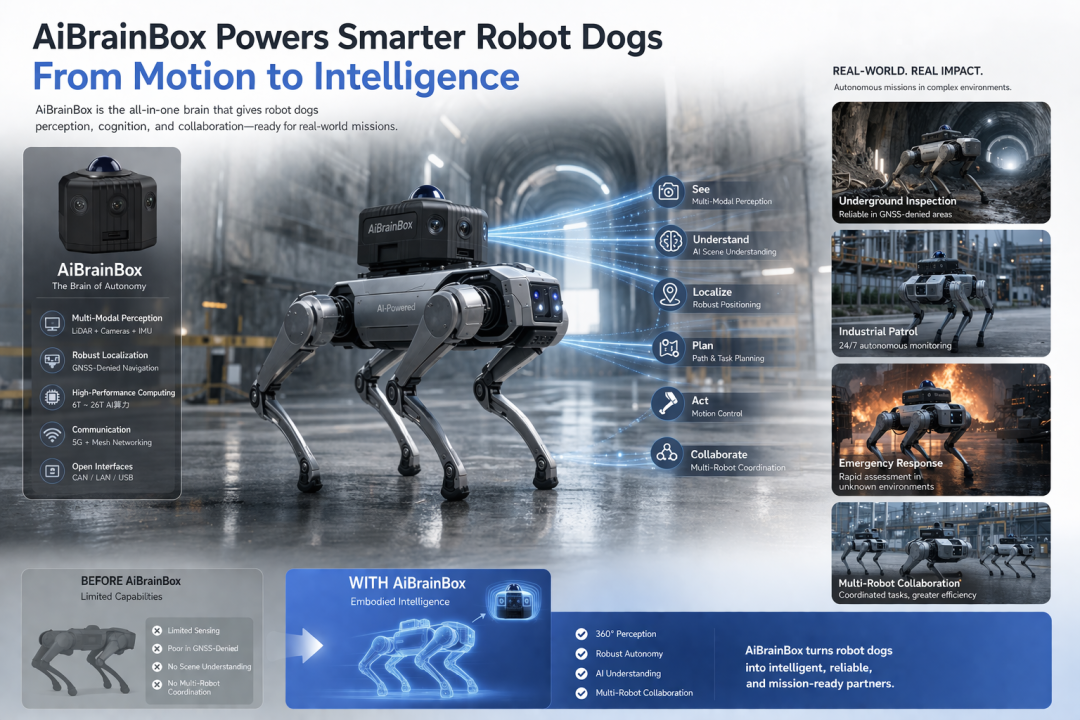
AiBrainBox integrates perception, computing, communication and controlto power next-generation ground robots and quadrupeds
核心:
-
Multi-Modal Perception
-
GNSS-Denied Navigation
-
Ready for Multi-Robot Systems
数据流 + 多机协同架构图
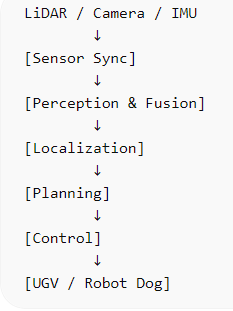
Multi-Modal Data Flow & Multi-Robot Coordination
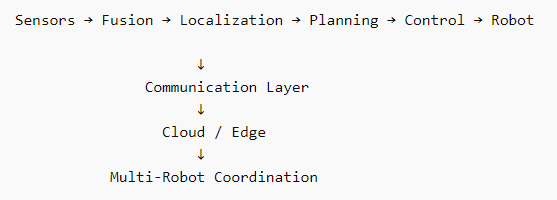
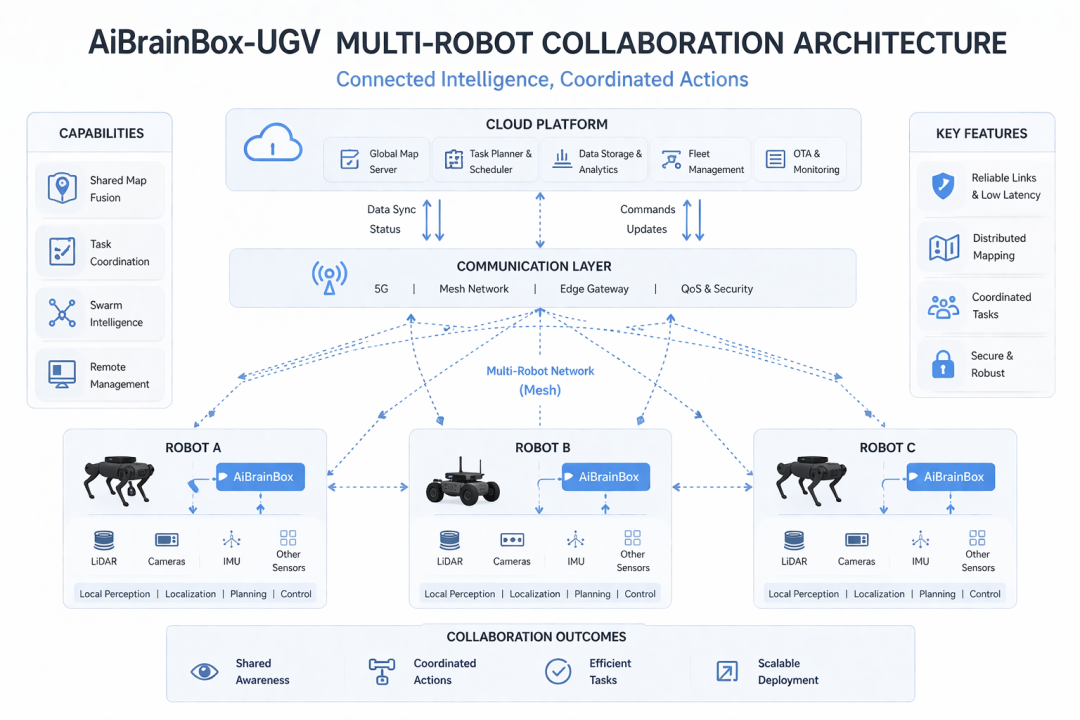
🤖多机协同

-
Shared Map
-
Task Coordination
-
Swarm Intelligence

产品核心能力
🟦 Multi-Modal Perception
LiDAR + Vision + IMU fusionReal-time synchronized sensing
🟩 Robust Localization
Stable positioning without GNSSDesigned for underground & indoor environments
🟨 Integrated Communication
5G + Mesh networkingEdge-to-cloud connectivity
🟥 Open Robot Platform
LAN / USB / CAN interfacesFull SDK for customization
From sensing to control --- fully integrated in one system
AiBrainBox is designed as a layered architecture, enabling scalable deployment from single robots to multi-agent systems.
From Single Robot to Swarm Intelligence
应用场景
-
地下矿山
-
铁路巡检
-
工业园区
-
安防巡逻
Underground Inspection
Reliable navigation in GNSS-denied environments
Railway & Tunnel
Long-range autonomous inspection
Industrial Safety
Continuous monitoring and anomaly detection
Security Patrol
Autonomous multi-robot operations

目标客户:
-
高校
-
科研院所
-
解决方案公司
卖点:
-
快速验证算法
-
GNSS拒止定位
-
多模态融合
场景建议:
① 地下空间
-
矿山
-
隧道
-
地铁
👉 GNSS拒止 + 多模态
② 巡检
-
电力
-
石化
-
港口
③ 安防 / 军用
-
多机协同
-
群体智能