集智联机器人(PNP)亮相第三届中国具身智能大会,以"双臂+遥操作"多维方案定义具身交互新范式
2026年4月10-12日,以"体驱万物,智汇江淮"为主题的第三届中国具身智能大会(CEAI 2026)在合肥盛大启幕。集智联机器人(Plug & Play Robotics,简称PNP机器人)作为Franka Robotics战略合作伙伴,携FRANKA双臂具身智能成套方案及多项创新交互技术重磅亮相,与全球院士专家、头部企业共同探讨具身智能从理论突破到产业落地的关键路径,现场技术演示引发行业高度关注。

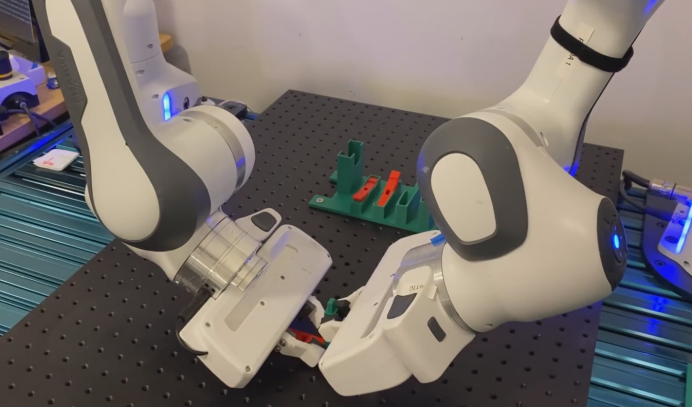
作为具身智能领域的核心技术方向,双臂操作正成为技术攻坚与产业落地的双重热点。本次大会上,PNP机器人展示的FRANKA双臂方案,深度融合模仿学习、强化学习与多模态融合技术,实现精准协同操作。当前,全球主流技术阵营均在加速双臂交互能力迭代:谷歌Gemini模型聚焦多模态指令到双臂动作的端到端生成,清华大学RDT-2模型通过实时环境感知优化双臂协调策略,GR00T模型则在大规模操作数据训练下提升复杂场景泛化能力。
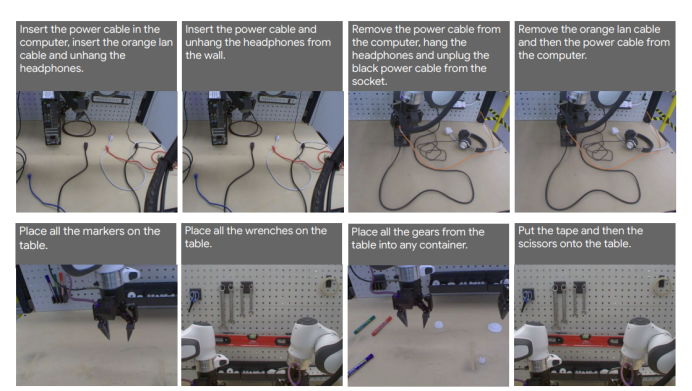
 MIT获得ICRA2026最佳论文: Fabrica: Dual-Arm Assembly of General Multi-Part Objects via Integrated Planning and Learning 提出一套面向通用多部件装配的双臂机器人系统。
MIT获得ICRA2026最佳论文: Fabrica: Dual-Arm Assembly of General Multi-Part Objects via Integrated Planning and Learning 提出一套面向通用多部件装配的双臂机器人系统。
与此同时,Skild AI、Generalist等创业公司以轻量化双臂大模型方案实现快速落地,MIT FABRIC实验室基于FRANKA平台的双臂操作研究更斩获ICRA 2025最佳论文,印证了双臂技术在学术与产业双维度的核心价值。PNP机器人通过即插即用(Plug & Play)技术适配,让FRANKA双臂方案快速适配科研、工业等多元场景,为技术验证与应用部署提供高效载体。
谷歌DeeM发布 Gemini 1.5,面向双臂组装,穿线等复杂应用场景
除引领双臂操作技术外,PNP机器人还展出INVERSE力反馈遥操作、空间鼠标遥操作及视触觉自适应抓取三大创新方案,构建"自主操作+远程操控+精准感知"的全维度技术矩阵。

PNP机器人还展出INVERSE力反馈遥操作
其中,INVERSE力反馈遥操作突破传统控制局限,实现6自由度高精度力反馈传递,让远程.操作者精准感知接触力与环境阻力;空间鼠标遥操作则以直观交互方式,降低复杂动作的操控门槛,适配快速部署与灵活调试需求;视触觉自适应抓取方案融合视觉识别与触觉感知,通过实时力控调整抓取力度,实现对易碎、异形等复杂物体的稳定抓取,填补柔性操作领域的技术空白。三项技术均依托PNP机器人在硬件选型、多传感器融合领域的积累,实现"硬件-算法-场景"的深度协同。
清华大学 RDT-2模型 双臂操作演示
作为深耕具身智能领域的创新企业,PNP机器人始终坚持"集中智慧互联,达到即插即用"的理念,依托哈尔滨工业大学、多伦多大学等顶尖高校的学术背景,汇聚ABB、Universal Robots等行业头部企业的技术经验,打造覆盖硬件选型、算法开发、场景落地的全链路解决方案。
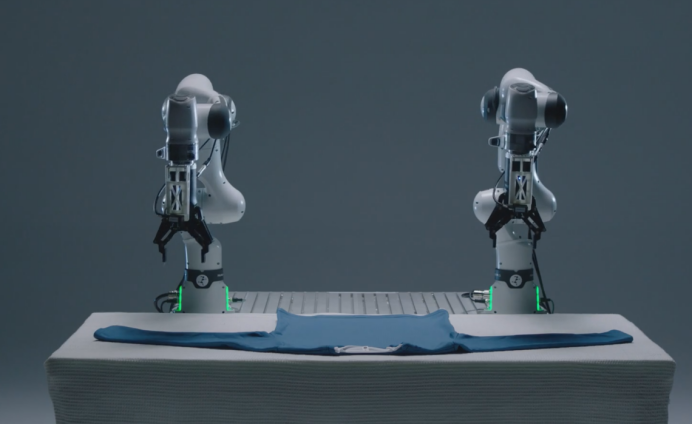
PNP机器人双臂人形遥操作Manpulation方案
本次亮相第三届中国具身智能大会,既是PNP机器人技术实力的集中展示,更是其推动具身智能产学研融合的重要实践。未来,PNP机器人将持续深化FRANKA双臂、遥操作等核心技术研发,加强与全球科研机构、产业伙伴的合作,加速具身智能技术从实验室走向生产线、从科研验证走向规模化应用,为中国具身智能产业发展注入强劲动力。
关于集智联机器人(PNP机器人)
集智联机器人(Plug & Play Robotics)聚焦机器人即插即用技术与具身智能通用解决方案,是Franka Robotics战略合作伙伴,团队成员来自ABB、优傲机器人等知名企业,学术背景覆盖哈工大、多伦多大学等顶尖高校。公司提供从FRANKA双臂平台、力控遥操作方案到视触觉抓取套件的全系列产品,服务超500家终端客户,推动具身智能在科研、工业、服务等领域的落地应用。