在铜电解精炼工艺中,阴极剥片是连接电解与后续加工的关键环节。传统的人工剥片存在劳动强度大、效率波动大、始极片破损率高等问题。随着铜冶炼行业向智能化、少人化方向升级,越来越多的企业开始采用机器人自动化剥片系统。
SNK施努卡专注非标自动化装备,针对阴极铜剥片工艺特点,开发了一套双线并行、上下两层布局的机器人剥片解决方案。本文详细介绍系统功能、实施难点及应对策略、客户实际收益。
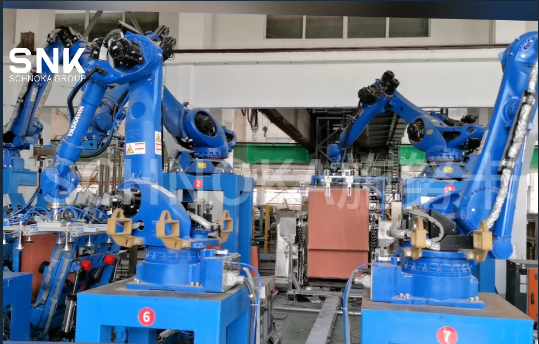
一、系统总体布局与功能
该方案采用两条线体并行运行 ,空间布局分为上下两层,最大化利用车间面积,同时实现多工序并行作业。
核心功能模块
|-----------|-----------------------------------|
| 模块 | 功能描述 |
| 来料清洗 | 对电解后的阴极板进行自动高压水洗,去除表面残留电解液和污泥 |
| 空母板回收 | 自动将剥片后的空母板堆叠、码垛,返回电解槽重复使用 |
| 机器人剥片 | 采用专用剥刀+双排吸盘协同动作,将始极片从母板上剥离 |
| 始极片输送 | 剥下的始极片自动输送至下游工序 |
| 校平 | 对始极片进行矫平处理,消除弯曲变形 |
| 称重 | 自动称重并记录,用于产量统计和质量追溯 |
| 检测与分拣 | 视觉检测始极片表面缺陷(裂纹、孔洞、边角破损),按质量等级自动分拣 |
| 装箱 | 合格始极片自动码垛装箱,准备进入下一道加工工序 |
两条线体可独立运行,一条线维护时另一条线仍可生产,整线自动化率超过95%。
二、实施难点与SNK施努卡的对策
难点:始极片剥离影响因素众多,实际剥离效果未知
阴极铜始极片与母板之间的结合力受多种因素影响:
- 电解液成分、温度、电流密度
- 沉积铜层的厚度、均匀性
- 母板表面状态(划痕、锈蚀、平整度)
- 电解周期长短
这些因素导致始极片的剥离难度波动很大:有时一碰就掉,有时需要较大剥离力。如果采用简单的垂直拉拔或单一剥刀,容易造成始极片撕裂、变形或母板损伤。
SNK施努卡的对策:剥刀 + 双排吸盘协同,倾斜角度剥离
我们设计了一套仿生剥离机构,核心要点如下:
- 剥刀先行 :特制剥刀以**一定倾角(非垂直)**插入始极片与母板之间的缝隙,初步分离边缘结合面。
- 双排吸盘协同 :两排真空吸盘按顺序动作------第一排吸盘在剥刀分离区域吸附固定,第二排吸盘随后吸附并施加斜向拉力,使剥离力沿始极片平面方向分力增大,垂直方向分力减小,从而保护始极片不被撕裂。
- 角度与力控制:通过伺服电机精确控制剥刀插入深度、倾斜角度和吸盘拉力曲线,适应不同结合力的始极片。
- 自适应算法:系统根据反馈的剥离阻力自动调整剥离速度和吸盘真空度,实现"软着陆"剥离。
经过现场多轮测试,该方案对结合力波动范围的适应性明显优于传统垂直剥离方式,始极片完好率提高至99%以上。
三、客户收益与价值
1. 大幅提高产线自动化及智能化水平
- 从清洗、剥片、回收母板到始极片校平、称重、检测、分拣、装箱,全流程自动化,无需人工干预。
- 双线并行,单线故障不影响另一线生产,整体利用率提升。
- 数据自动采集上传MES,生产过程透明化。
2. 人员投入大幅减少,显著降低劳动强度
- 传统人工剥片线每条需6-8名操作工 ,两班倒约12-16人。
- 采用本系统后,每条线仅需1-2名巡检人员 ,减少用工80%以上。
- 工人远离高温、酸雾、重体力作业环境,职业健康风险显著降低。
3. 始极片质量和产量得到明显保障
|----------|---------|------------|
| 指标 | 人工剥片 | SNK机器人剥片 |
| 始极片完好率 | 92-95% | ≥99% |
| 单次剥片节拍 | 20-30秒 | ≤15秒 |
| 母板损伤率 | 约5% | <0.5% |
| 日均产能(单线) | 约800片 | ≥1200片 |
| 质量一致性 | 依赖工人熟练度 | 程序化一致 |
四、为什么选择SNK施努卡的阴极铜剥片系统?
- 专为铜冶炼行业设计:熟悉电解铜工艺,了解始极片剥离的痛点,已有多个成功案例。
- 剥刀+双排吸盘专利结构:有效应对结合力波动,保护始极片和母板。
- 双线并行、上下两层布局:节省场地,产能翻倍,互为备份。
- 全流程覆盖:不单是剥片,还集成清洗、校平、称重、视觉检测、分拣装箱,用户无需再找多家供应商。
- 售后响应快:总部苏州,在主要冶炼基地设有服务点,备件充足。