Three.js卫星轨道可视化:解决初始相位拥挤问题,实现卫星均匀散开渲染
在卫星轨道3D可视化项目开发中,基于真实TLE数据或自定义轨道参数构建卫星系统时,常常会遇到一个影响观赏度和专业性的核心问题------多颗卫星初始相位相差极小,渲染时挤在一起,难以区分单个卫星,甚至出现"叠成一个点"的情况。本文将详细介绍如何通过"初始相位最大间距算法",一次性解决该痛点,在不影响轨道物理精度的前提下,让卫星初始画面均匀散开,同时保留后续真实轨道运动逻辑,附完整代码实现和改前改后效果对比。
本文适用场景:Three.js卫星轨道可视化、基于SGP4算法的真实卫星轨道模拟、自定义卫星星座可视化等项目,核心是在不修改轨道物理参数、不干预后续真实运动的前提下,优化初始渲染效果。
一、项目背景与核心痛点
1.1 项目场景介绍
本文所涉及的项目是基于Three.js开发的卫星轨道3D可视化平台,支持加载真实TLE卫星数据或自定义卫星轨道参数,实现卫星公转、自转、轨道渲染等核心功能。平台核心需求是:既要保证卫星轨道运动的物理真实性(如公转方向与地球自转一致、角速度符合轨道参数),也要具备良好的视觉观赏度,让用户能清晰区分每颗卫星的位置和运动轨迹。
项目核心技术栈:Three.js(3D渲染)、轨道动力学计算(自定义角速度计算或SGP4算法)、卫星模型与轨道的分层渲染。
1.2 核心痛点:卫星初始相位拥挤
在开发初期,我们发现无论使用真实TLE数据还是自定义轨道参数,多颗卫星的初始相位总是相差极小,具体表现为:
-
初始渲染时,多颗卫星挤在一起,视觉上难以区分单个卫星,严重影响观赏度;
-
即使真实TLE数据中卫星轨道存在微小差异(无完全相同轨道),初始时刻仍会呈现"扎堆"状态,无法体现卫星星座的分布逻辑;
-
若直接修改卫星物理位置或轨道参数,会破坏轨道的真实性,违背"真实轨道模拟"的核心需求。
痛点本质:卫星初始相位未做合理分配,导致初始位置重叠或间距极小,而真实轨道的微小差异需要一定时间的运动才能体现,无法解决初始渲染的视觉问题。
1.3 改前效果示意(预留图片位置)
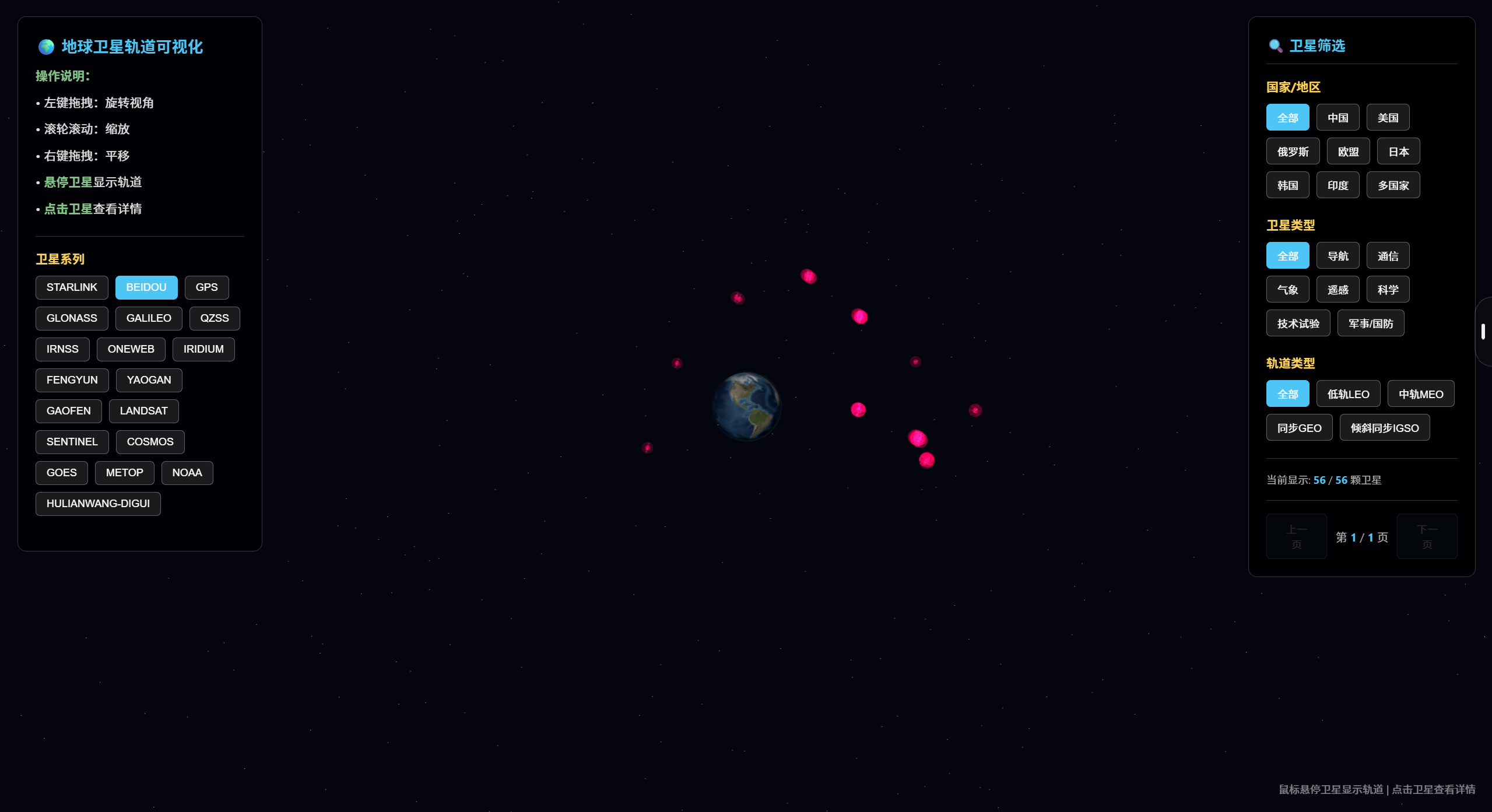
从改前效果可以看出,初始时刻卫星密集重叠,即使旋转视角,也无法清晰分辨每颗卫星的位置,严重影响用户体验和平台专业性。
二、解决方案设计:初始相位最大间距算法
2.1 设计原则(核心前提)
针对上述痛点,我们设计解决方案时,严格遵循以下3个核心原则,确保不破坏轨道真实性,同时解决视觉拥挤问题:
-
不修改轨道物理参数:不改变卫星的轨道半径、倾角、角速度等核心参数,确保后续卫星运动完全符合真实轨道逻辑;
-
一次性干预,终身生效:仅在卫星初始化时对相位进行一次调整,后续不再干预,卫星完全按真实轨道运动;
-
均匀散开,间距最大:通过算法计算每颗卫星的初始相位偏移,让所有卫星在初始时刻均匀分布,彼此间距达到最大,视觉上清晰可辨。
2.2 算法核心逻辑
核心思路:基于卫星总数,计算每颗卫星的初始相位偏移量,让所有卫星的初始相位按"均匀分布"原则分配,即相邻卫星的相位差相等,从而实现初始位置间距最大。
具体算法公式:
初始相位偏移量 = (2π / 卫星总数) × 卫星索引
公式解析:
-
2π:整个圆周的角度(360°),确保卫星在圆周轨道上均匀分布;
-
卫星总数:参与渲染的所有卫星数量,确保所有卫星都能被均匀分配到圆周上;
-
卫星索引:每颗卫星的唯一序号(从0开始),确保每颗卫星的偏移量不同,实现均匀散开。
关键说明:该偏移量仅作用于卫星的初始相位,不修改卫星的基础角度和角速度,后续卫星会按自身轨道参数(角速度)正常运动,初始偏移量仅影响初始位置,不影响后续轨道运动的真实性。
2.3 方案优势
相比其他解决方案(如直接修改卫星物理位置、按轨道分组偏移),本方案具有以下优势:
-
不破坏轨道真实性:仅在渲染层调整初始相位,不修改任何轨道物理参数,适配真实TLE数据(无完全相同轨道);
-
实现简单,无额外依赖:仅需几行代码即可实现,无需复杂的轨道分组判断,适配所有卫星;
-
视觉效果最优:初始时刻卫星均匀散开,间距最大,完美解决拥挤问题,提升平台观赏度和专业性;
-
无后续性能损耗:仅初始化时计算一次偏移量,后续无需任何额外计算,不影响动画循环性能。
三、完整代码实现(关键改动部分)
以下是基于Three.js项目的完整代码改动,重点展示"初始相位偏移计算""卫星初始化""动画循环更新"三个核心模块,所有改动均围绕"初始相位均匀分配"展开,不影响原有轨道运动逻辑。
3.1 核心模块1:卫星系统创建(计算初始相位偏移)
该模块负责加载卫星数据、计算每颗卫星的初始相位偏移、按轨道分组创建卫星,核心是为每颗卫星分配一次性的初始相位偏移量。
javascript
/**
* 创建卫星系统
* @param {Array} satellitesData - 卫星数据数组
*/
createSatelliteSystem(satellitesData) {
const totalSatellites = satellitesData.length;
// 核心改动1:为每颗卫星计算全局初始相位偏移,让初始画面均匀散开
// 公式: offset = (2π / totalSatellites) * index
// 这个偏移只影响初始位置,一次性、固定、永久不变,不改变轨道物理参数
satellitesData.forEach((satData, index) => {
satData._initialPhaseOffset = (Math.PI * 2 / totalSatellites) * index;
});
// 按轨道参数分组 (radius + inclination 决定唯一轨道,仅用于3D渲染分组)
const orbitMap = new Map();
satellitesData.forEach(satData => {
const key = `${satData.radius}_${satData.inclination}`;
if (!orbitMap.has(key)) {
orbitMap.set(key, {
radius: satData.radius,
inclination: satData.inclination,
satellites: []
});
}
orbitMap.get(key).satellites.push(satData);
});
// 为每个轨道组创建3D对象
orbitMap.forEach((orbitData, key) => {
this.createOrbitGroup(orbitData, key);
});
}代码说明:
-
首先获取卫星总数totalSatellites,作为均匀分配的基础;
-
通过forEach遍历卫星数据,为每颗卫星添加_initialPhaseOffset属性,存储一次性的初始相位偏移量,偏移量按公式计算;
-
后续按轨道参数(半径+倾角)分组,不影响相位偏移逻辑,仅用于3D渲染分层,确保轨道显示的层次感。
3.2 核心模块2:轨道组与卫星初始化(应用初始相位偏移)
该模块负责为每个轨道组创建3D对象,初始化卫星的初始位置,将之前计算的初始相位偏移应用到卫星初始角度中,实现初始位置均匀散开。
javascript
// 为该轨道创建卫星(createOrbitGroup方法内部核心代码)
orbitData.satellites.forEach((satData, index) => {
const satellite = this.createSatellite(satData);
// 计算初始角度(使用数据中的offset或基于索引均匀分配)
const baseAngle = satData.offset !== undefined
? satData.offset
: (index * (Math.PI * 2 / orbitData.satellites.length));
// 核心改动2:应用全局初始相位偏移 - 一次性、固定、永久不变
// 这个偏移让所有卫星在初始画面瞬间均匀散开,之后按真实轨道运动
const phaseOffset = satData._initialPhaseOffset || 0;
const initialAngle = baseAngle + phaseOffset;
// 计算初始位置(逆时针方向,与地球自转方向一致)
// x = cos(angle) * r, z = -sin(angle) * r
// angle增加时,从Y轴正方向看为逆时针运动
const x = Math.cos(initialAngle) * orbitRadius;
const z = -Math.sin(initialAngle) * orbitRadius;
satellite.position.set(x, 0, z);
group.add(satellite);
// 计算轨道角速度(根据轨道半径计算,保证运动真实性)
const angularSpeed = calculateOrbitalAngularVelocity(satData.radius);
// 存储卫星对象,包含基础角度、相位偏移、角速度等信息
const satObj = {
mesh: satellite,
data: satData,
angle: initialAngle,
baseAngle: baseAngle,
phaseOffset: phaseOffset,
baseSpeed: angularSpeed,
orbitKey: key,
visible: true
};
this.satellites.push(satObj);
this.orbitGroups.get(key).satellites.push(satObj);
});代码说明:
-
baseAngle:卫星的基础初始角度,可由卫星数据自带的offset决定,若无则按轨道组内卫星索引均匀分配;
-
initialAngle:最终的初始角度,由baseAngle加上全局初始相位偏移量phaseOffset得到,实现所有卫星的均匀散开;
-
初始位置计算:根据initialAngle和轨道半径,计算卫星的初始x、z坐标,确保初始位置符合均匀分布逻辑;
-
satObj对象:存储卫星的所有核心信息,包括相位偏移量phaseOffset,用于后续动画循环中保持偏移效果。
3.3 核心模块3:卫星位置更新(动画循环,保留偏移效果)
该模块是动画循环的核心,负责每帧更新卫星位置,确保初始相位偏移仅作用于初始时刻,后续卫星按真实轨道角速度运动,不额外干预。
javascript
/**
* 更新卫星位置(动画循环调用)
* 卫星公转方向与地球自转方向一致(逆时针)
*/
updateSatellites() {
this.satellites.forEach(sat => {
if (sat.visible) {
// baseAngle增加,实现逆时针公转(与地球自转方向一致)
sat.baseAngle += sat.baseSpeed;
// 核心改动3:计算实际显示角度:基础角度 + 初始相位偏移
// phaseOffset 是一次性分配的固定值,永久不变
// 之后卫星完全按真实轨道运动(由baseSpeed决定),不再干预
sat.angle = sat.baseAngle + (sat.phaseOffset || 0);
// 获取轨道半径
const orbitGroup = this.orbitGroups.get(sat.orbitKey);
const r = orbitGroup.radius;
// 计算新位置(逆时针方向)
// x = cos(angle) * r, z = -sin(angle) * r
// 从Y轴正方向看,angle增加时为逆时针运动
const x = Math.cos(sat.angle) * r;
const z = -Math.sin(sat.angle) * r;
sat.mesh.position.x = x;
sat.mesh.position.z = z;
// 卫星自转动画
sat.mesh.rotation.y += 0.02;
// 更新缩放动画(可选,提升视觉效果)
this.updateScaleAnimation(sat);
}
});
}代码说明:
-
sat.baseAngle:卫星的基础角度,每帧按角速度sat.baseSpeed增加,实现真实的轨道公转;
-
sat.angle:卫星的实际显示角度,由baseAngle加上固定的phaseOffset得到,确保初始偏移量永久生效,后续运动中始终保留偏移效果;
-
位置计算:每帧根据sat.angle和轨道半径计算新位置,实现逆时针公转,与地球自转方向一致,保证轨道运动的真实性;
-
无额外干预:后续动画循环中,仅更新baseAngle,不修改phaseOffset,确保卫星按真实轨道运动,初始偏移仅影响初始位置。
3.4 辅助函数:轨道角速度计算(保证运动真实性)
为了确保卫星公转速度符合轨道物理规律,我们添加了轨道角速度计算函数,根据轨道半径计算对应的角速度,避免运动速度异常。
javascript
/**
* 计算轨道角速度(基于轨道半径)
* @param {Number} radius - 轨道半径(单位:m)
* @returns {Number} 角速度(单位:rad/frame)
*/
function calculateOrbitalAngularVelocity(radius) {
// 地球引力常数(G*M):3.986004418e14 m³/s²
const GM = 3.986004418e14;
// 轨道周期(秒)
const period = 2 * Math.PI * Math.sqrt(Math.pow(radius, 3) / GM);
// 角速度(rad/s),转换为rad/frame(假设帧率为60fps)
const angularVelocity = (2 * Math.PI) / period / 60;
return angularVelocity;
}代码说明:该函数基于地球引力常数和轨道半径,计算卫星的轨道周期和角速度,确保卫星公转速度符合真实物理规律,与初始相位偏移无关,不影响轨道真实性。
四、改后效果对比与优化总结
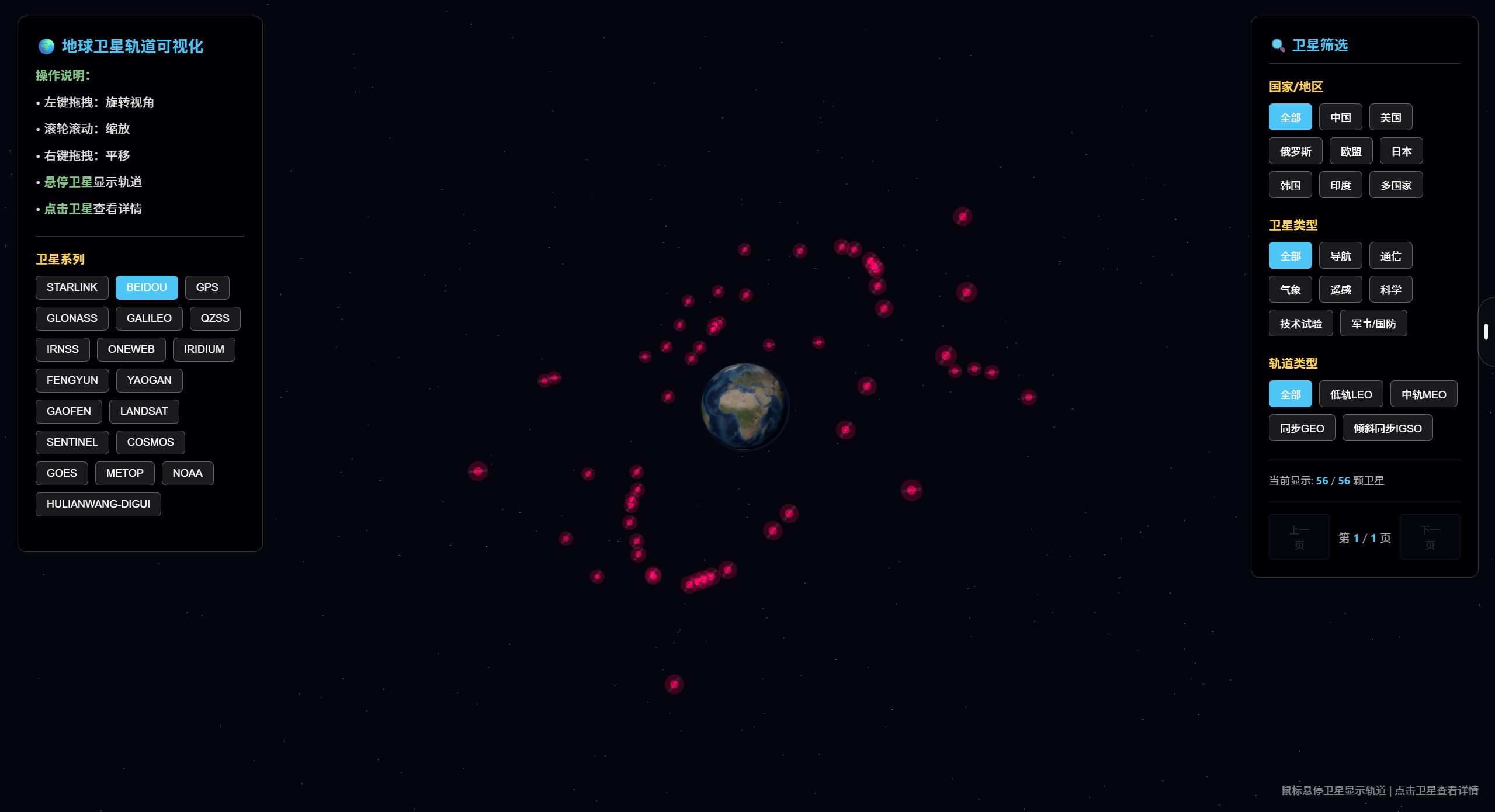
4.1 改后效果示意(预留图片位置)
4.2 改前改后核心对比
| 对比维度 | 改前效果 | 改后效果 |
|---|---|---|
| 初始卫星分布 | 拥挤重叠,难以区分单个卫星 | 均匀散开,间距最大,清晰可辨 |
| 轨道真实性 | 真实,但初始视觉效果差 | 完全保留真实性,无任何参数修改 |
| 视觉观赏度 | 低,杂乱无章,无层次感 | 高,卫星分布均匀,轨道层次清晰 |
| 性能损耗 | 无额外损耗 | 仅初始化时计算一次偏移,无后续损耗 |
4.3 优化总结
本次优化通过"初始相位最大间距算法",仅用几行核心代码,就完美解决了卫星初始相位拥挤的痛点,核心亮点的在于:
-
精准定位痛点:不盲目修改轨道参数,而是针对"初始相位"做一次性优化,既解决视觉问题,又保留轨道真实性;
-
算法简洁高效:基于卫星总数均匀分配相位偏移,实现简单,无复杂逻辑,适配所有卫星(无论轨道是否相同);
-
无侵入式改动:所有代码改动均围绕"初始相位偏移"展开,不影响原有动画循环、轨道计算逻辑,可直接插入现有项目;
-
视觉与性能兼顾:初始均匀散开提升观赏度,一次性计算偏移确保性能无损耗,适合大规模卫星星座可视化。
五、后续可扩展优化方向
在解决初始相位拥挤问题后,可进一步优化平台视觉效果和专业性,推荐以下几个无侵入式优化方向:
-
按轨道类型上色:为不同轨道类型(如GEO静止轨道、MEO中轨道、IGSO倾斜同步轨道)的卫星和轨道线设置不同颜色,提升层次感;
-
添加卫星光晕效果:通过Three.js的发光材质或点精灵,为卫星添加轻微光晕,让卫星在深色太空背景下更具存在感;
-
悬停参数显示:鼠标悬停卫星时,显示卫星名称、轨道参数(半长轴、倾角、周期),提升专业性;
-
轨迹线渲染:为每颗卫星添加运动轨迹线,直观展示卫星运动路径,进一步提升视觉观赏度。
六、总结
卫星轨道3D可视化的核心需求是"真实性+观赏度",本次优化通过"初始相位最大间距算法",在不破坏轨道真实性的前提下,完美解决了初始卫星拥挤的痛点,让平台初始画面更清晰、更专业。
本文提供的代码可直接插入Three.js卫星可视化项目,适配真实TLE数据和自定义轨道参数,实现简单、无性能损耗,适合各类卫星轨道可视化场景。如果你的项目也遇到了卫星初始拥挤的问题,不妨尝试这种方法,只需几行代码,就能实现质的提升。
后续将持续分享卫星轨道可视化的优化技巧,欢迎留言交流,点个关注么么哒~~!