快速了解部分
基础信息(英文):
- 题目: RADAR: Closed-Loop Robotic Data Generation via Semantic Planning and Autonomous Causal Environment Reset
- 时间: 2026.03
- 机构: Southern University of Science and Technology (南方科技大学)
- 3个英文关键词: Autonomous Data Generation, In-Context Imitation Learning, Environment Reset
1句话通俗总结本文干了什么事情
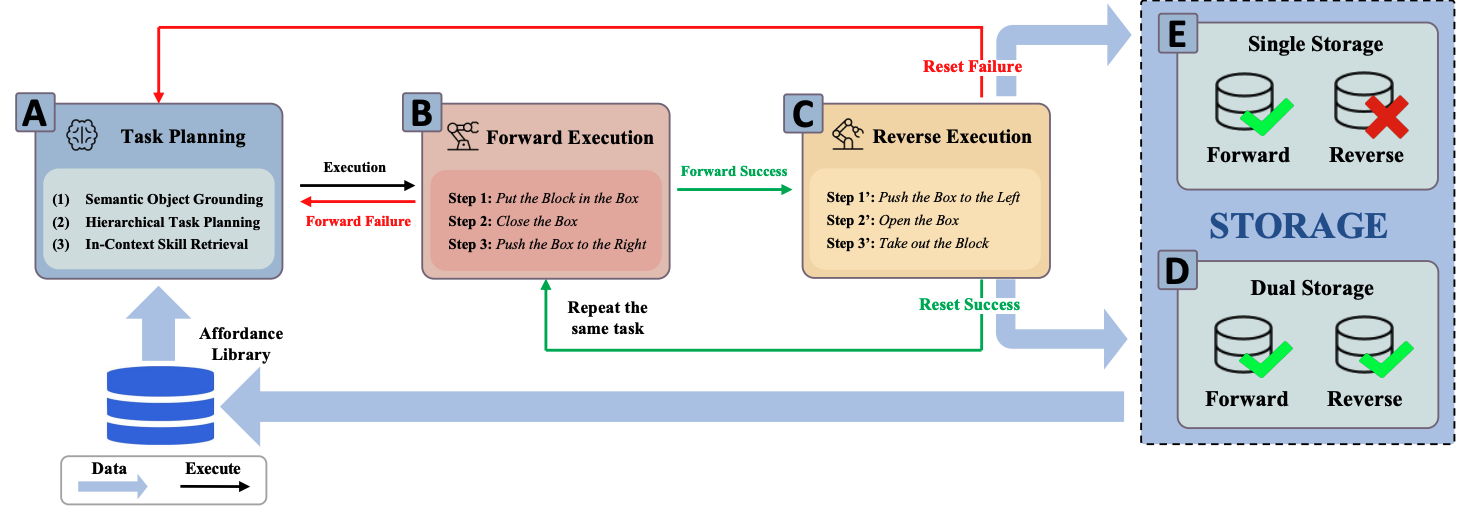
作者造了一个叫RADAR的"全自动机器人数据工厂",它只需要人演示几次,就能自己给自己出题、自己干活、自己判断干得对不对,甚至干完活后还能自己把桌子收拾好(环境重置),从而不知疲倦地自动生产海量训练数据。
研究痛点:现有研究不足 / 要解决的具体问题
- 数据太贵: 现在的机器人学习(如VLA)需要海量数据,靠人远程遥控收集太慢太贵,靠仿真环境又有"虚实迁移"的鸿沟。
- 无法闭环: 现有的自动化方法(如SOAR)虽然能自己干活,但干完活后环境乱了,没法自动恢复原状,还得人来收拾,导致无法连续工作。
- 精度不够: 纯靠VLM(视觉语言模型)去猜3D坐标容易"幻觉"(猜不准),导致操作失败。
核心方法:关键技术、模型或研究设计(简要)
- 大脑+小脑架构: 用VLM做大脑负责思考和规划,用GNN(图神经网络)做小脑负责精准动作执行。
- Affordance Library(示教库): 存几个人类演示的3D轨迹作为"模板"。
- LIFO重置机制: 利用有限状态机(FSM)和因果推理,严格按照"后进先出"的顺序自动把环境复原。
深入了解部分
作者想要表达什么
作者认为,要实现具身智能的Scaling Law(规模法则),必须打破数据收集的瓶颈。他们想证明RADAR系统可以完全把人类踢出数据收集循环(Human-out-of-the-loop),实现真正的、可持续的、低成本的物理世界数据自动化生产。
相比前人创新在哪里
- 真·闭环: 前人(如SOAR)干完活环境就乱了,RADAR能自动把环境"复原",这是最大的突破。
- 拒绝2D瞎猜: 前人(如MOKA)让VLM在2D图片上找点再转3D,容易错;RADAR直接检索库里现成的3D演示模板,更准。
- 容错机制: 设计了不对称的数据存储逻辑,就算重置失败了,也能把刚才成功的干活数据存下来,不浪费。
解决方法/算法的通俗解释
想象一个不知疲倦的工人:
- 看样学样(Affordance Library): 你先给他看几个动作(比如怎么抓杯子、怎么叠毛巾),他记在小本本上。
- 自己出题(VLM Planning): 他看一眼桌子,VLM大脑说:"好,现在我要把那个柠檬抓起来,放到盘子里。"
- 精准操作(GNN Execution): 他不去瞎猜怎么抓,而是翻开小本本,找到"抓球"的那个动作模板,直接套用,精准执行。
- 自己检查(VQA Evaluation): 做完后,他拍张照问自己:"柠檬在盘子里了吗?"确认成功了才算数。
- 自己收拾(Autonomous Reset): 最关键的一步,他记得刚才拿了柠檬,现在他就按相反顺序,把柠檬放回去,把盘子挪回去,把桌子恢复成刚开始的样子,准备做下一次。
解决方法的具体做法
- Module 1 (规划): VLM接收图像,识别物体,从库里检索最像的3D演示动作(In-Context Skill Retrieval),生成任务链。
- Module 2 (执行): 基于Instant Policy框架,利用图扩散模型(Graph Diffusion),结合当前的点云和检索到的演示,生成机械臂轨迹。
- Module 3 (评估): 用VQA(视觉问答)流程,把任务转成问题(如"物体在A处吗?"),让VLM回答Yes/No。
- Module 4 (重置): 这是一个FSM(有限状态机)。如果成功,VLM生成逆向任务序列(LIFO),指挥机器人复原环境;如果失败,直接丢弃数据并重新规划。
基于前人的哪些方法
- Instant Policy: 用作底层的动作生成策略(GNN + Diffusion)。
- VLM (如GPT-4V/CogVLM): 用作高层规划和评估。
- Set-of-Mark / MOKA: 参考了其视觉提示的思路,但做了改进(从2D转3D)。
实验设置、数据、评估方式、结论
- 设置: RLBench仿真环境 + 真实机械臂(Realman RM65-B)。
- 对比: 对比了MOKA和ReKep。
- 结论:
- 仿真: 在长程任务(如推积木+叠积木)上,RADAR成功率高达80-90%,而基线方法几乎为0。
- 真机: 仅用1-5次演示,就能自动执行叠毛巾、插纸卷等复杂任务,且能自动重置环境。
提到的同类工作
- SOAR: 也是做自动数据收集的,但无法自动重置环境。
- MOKA: 基于2D标记的视觉提示方法。
- ReKep: 基于关系关键点的时空推理方法。
- RoboCat / RoboGen: 其他自动化机器人学习框架。
和本文相关性最高的3个文献
- Instant Policy: 本文底层执行策略的直接基础(In-Context Imitation Learning)。
- SOAR: 本文在Introduction和Related Work中主要对比的"自动数据收集"竞品,本文主要解决了SOAR无法重置环境的痛点。
- MOKA: 本文在视觉提示(Visual Prompting)方面主要对比和改进的对象,本文解决了MOKA在2D空间猜测3D坐标不准的问题。
我的
主要就是一个自主采集流程。如果reset失败,作者选择重新Plan,收集新任务数据。