目录
1.摘要
针对无线传感器网络(WSN)中无人机数据收集的路径规划难题,本文构建了一种面向实际应用新型约束优化模型。为突破传统数学方法推导复杂以及经典进化计算(EC)串行耗时的技术瓶颈,本文提出了一种基于矩阵的差分进化算法(MDE),通过矩阵索引操作实现并行计算,从而大幅提升求解效率,鉴于现有矩阵进化计算在处理约束优化问题时的局限性,进一步引入了约束引导优化(CGO)策略,使MDE具备了处理复杂约束的能力。
2.系统模型与问题陈述
系统模型
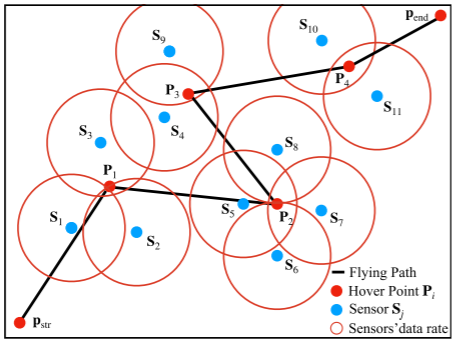
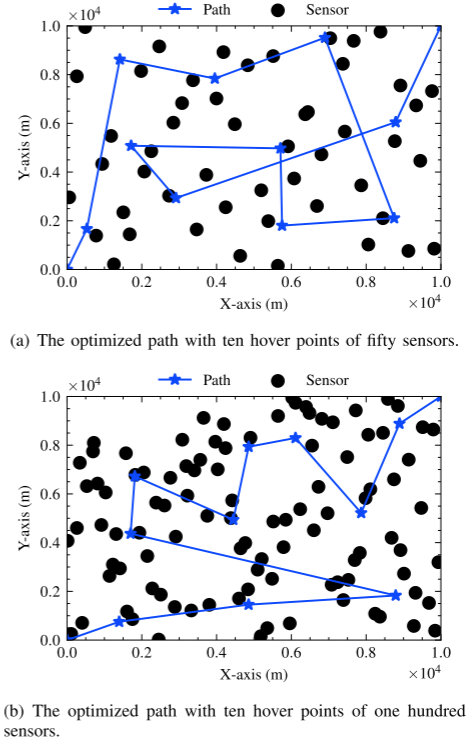
针对WSN数据收集任务,本文构建了以总任务时间最小化为目标无人机航迹规划数学模型。
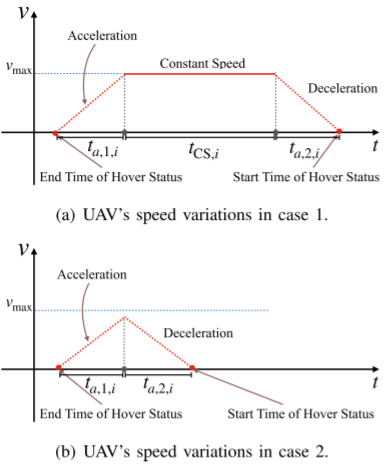
在飞行阶段,无人机的速度服从梯形分布,即在相邻悬停点间经历匀加速、匀速及匀减速过程;若段间距离过短不足以加速至最大速度,则速度分布退化为不包含匀速段的等腰三角形。设相邻航路点间距为 d i d_i di,无人机最大速度为 v m a x v_{max} vmax,恒定加速度为 a a a,则段间单程飞行时间 T f l y , i T_{fly,i} Tfly,i:
T f l y , i = { d i v m a x + v m a x a , d i > v m a x 2 a 2 d i a , d i ≤ v m a x 2 a T_{fly,i}=\begin{cases}\frac{d_i}{v_{max}}+\frac{v_{max}}{a},&d_i>\frac{v_{max}^2}{a}\\2\sqrt{\frac{d_i}{a}},&d_i\leq\frac{v_{max}^2}{a}\end{cases} Tfly,i=⎩ ⎨ ⎧vmaxdi+avmax,2adi ,di>avmax2di≤avmax2
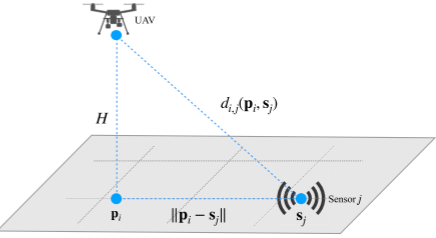
无人机的数据接收速率随三维空间距离呈线性衰减,已知恒定飞行高度为 H H H,地面最大通信速率 R c R_c Rc。信号衰减因子为 ϵ \epsilon ϵ,无人机在第 i i i个悬停点 p i p_i pi接收第 j j j个传感器 s j s_j sj的速率 R i , j R_{i,j} Ri,j为:
R i , j = max ( R c − ϵ ∥ p i − s j ∥ 2 + H 2 , 0 ) R_{i,j}=\max\left(R_c-\epsilon\sqrt{\|p_i-s_j\|^2+H^2},0\right) Ri,j=max(Rc−ϵ∥pi−sj∥2+H2 ,0)
传感器 j j j成功上传的总数据量 Q j Q_j Qj为所有悬停点采集量的累加 ( T h o v , i T_{hov,i} Thov,i为悬停时间):
Q j = ∑ i = 1 I R i , j T h o v , i Q_j=\sum_{i=1}^IR_{i,j}T_{hov,i} Qj=i=1∑IRi,jThov,i
问题陈述
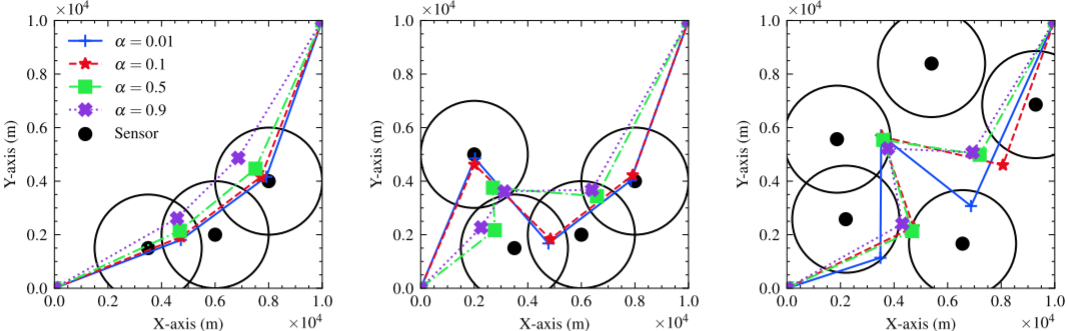
总飞行时间与总悬停时间最小:
min P , T h o v α ( ∑ i = 0 I T f l y , i ) + ( 1 − α ) ( ∑ i = 1 I T h o v , i ) \min_{P,T_{hov}}\alpha\left(\sum_{i=0}^IT_{fly,i}\right)+(1-\alpha)\left(\sum_{i=1}^IT_{hov,i}\right) P,Thovminα(i=0∑ITfly,i)+(1−α)(i=1∑IThov,i)
约束条件:
p i ∈ A , 0 < T h o v , i ≤ T m a x , ∑ j = 1 J R i , j ≤ R λ , Q j ≥ Q λ p_i \in A, \quad 0 < T_{hov,i} \le T_{max}, \quad \sum_{j=1}^{J} R_{i,j} \le R_\lambda, \quad Q_j \ge Q_\lambda pi∈A,0<Thov,i≤Tmax,j=1∑JRi,j≤Rλ,Qj≥Qλ
3.基于矩阵的差分进化与约束引导优化
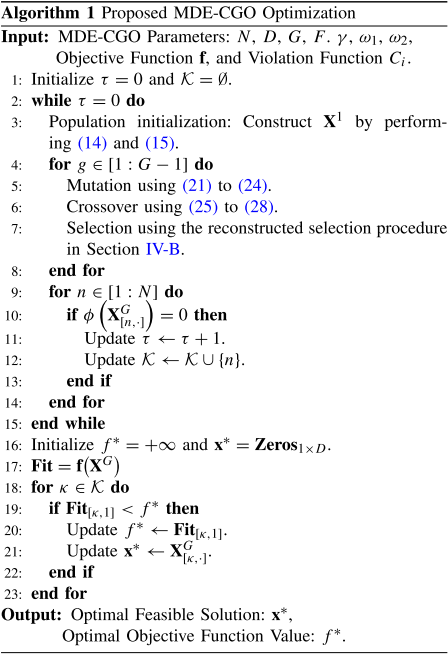
采用矩阵差分进化MDE结合约束引导优化,本文提出MDE-CGO算法,以矩阵形式 X g ∈ X_g\in Xg∈ R N × D \mathbb{R}^{N\times D} RN×D统一表征种群。
在种群演化阶段,算法采用 DE/rand/1变异策略,基于随机重排索引生成变异目标矩阵 K g K_g Kg:
K g = X g , r 1 , ⋅ + F ∘ ( X g , r 2 , ⋅ − X g , r 3 , ⋅ ) K_g=X_{g,r_1,\\cdot}+F\circ(X_{g,r_2,\\cdot}-X_{g,r_3,\\cdot}) Kg=Xg,r1,⋅+F∘(Xg,r2,⋅−Xg,r3,⋅)
算法构建二项式交叉掩码布尔矩阵 Φ C \Phi_C ΦC将当前种群 X g X_g Xg与变异矩阵 K g K_g Kg 进行元素级融合,生成包含新位置与悬停时间特征的试验种群矩阵 Z g : Z_g: Zg:
Z g = K g ∘ Φ C + X g ∘ Φ ˉ C Z_g=K_g\circ\Phi_C+X_g\circ\bar{\Phi}_C Zg=Kg∘ΦC+Xg∘ΦˉC
鉴于经典进化算法及常规MDE在处理通信速率上限与数据收集底线等硬约束时易陷入局部最优或产生大量无效解,本文引入约束引导优化(CGO)机制,该机制定义了非负的总约束违反度函数
ϕ ( x ) \phi(x) ϕ(x),通过加权聚合各项约束的偏离量来量化个体的不可行程度:
ϕ ( x ) = ∑ i = 1 Z ω i C i ( x ) \phi(x)=\sum_{i=1}^Z\omega_iC_i(x) ϕ(x)=i=1∑ZωiCi(x)
在环境选择环节,CGO机制摒弃了易导致演化方向失控的传统罚函数法,转而采用严格可行性优先并行评价准则。当对比 X g X_g Xg与 Z g Z_g Zg中对应个体时,算法优先筛选违反度 ϕ ( x ) \phi(x) ϕ(x)更小的个体;仅当双方违反度等同时,才进一步评估并保留总任务时间更优的解,引导大规模矩阵种群快速穿透不可行域,稳健收敛至满足所有通信与飞行约束的最优航迹解集。
4.结果展示
5.参考文献
Bai Y, Sun P F, Wang T H, et al. UAV path planning for data collection from wireless sensor network with matrix-based evolutionary computationJ. IEEE Transactions on Intelligent Transportation Systems, 2025.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx