你有没有想过一个问题:RTOS里,每个任务都有自己的栈。中断也有自己的栈。如果中断和任务共用同一个栈,会有什么问题?栈可能溢出,而且很难调试。 ARM32用了一个巧妙的办法:两个栈指针。
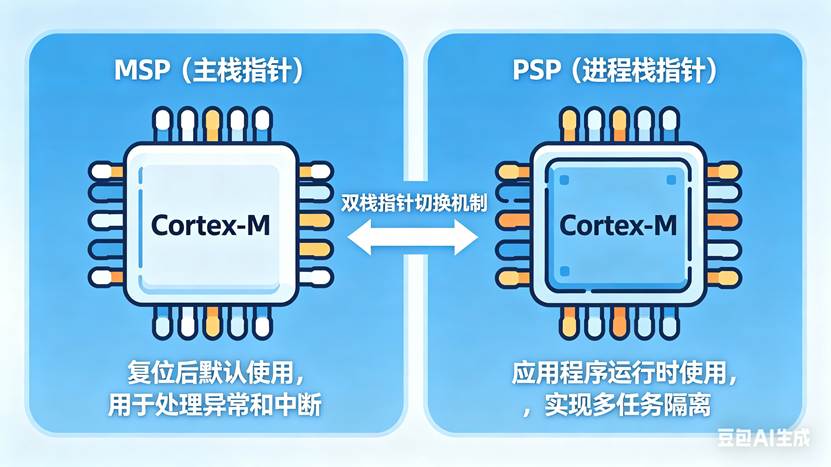
**那个"双指针"的设计,**Cortex-M内核有两个栈指针:
- MSP (Main Stack Pointer,主栈指针):复位后的默认栈。中断和异常用这个栈。
- PSP (Process Stack Pointer,进程栈指针):用户任务用这个栈。
当前使用哪个栈,由CONTROL寄存器的bit 1(SPSEL)决定:
- SPSEL=0:使用MSP(中断/内核模式)
- SPSEL=1:使用PSP(任务/线程模式)
两个栈,各走各的路。
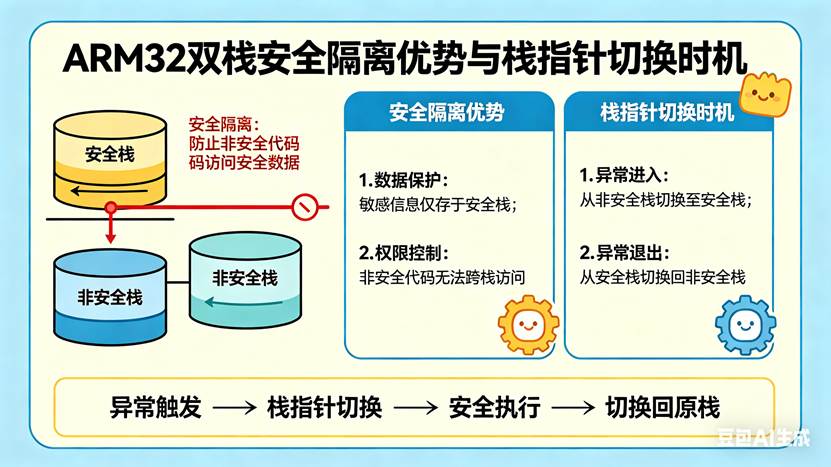
那个"隔离"的好处, 为什么需要两个栈?安全隔离。
- 中断栈(MSP)跑飞,不会破坏任务栈(PSP)的数据
- 任务栈溢出,不会影响中断的正常响应
教程中强调:栈溢出是嵌入式的大敌。双栈把风险隔开了。
**那个"切换"的时机,**什么时候切换栈指针?
- 上电/复位:默认使用MSP
- 进入中断:硬件自动切换到MSP
- 退出中断:恢复之前的CONTROL寄存器,切回原来的栈
RTOS任务切换:PendSV异常中,修改CONTROL寄存器的SPSEL位,从MSP切到PSP(或反之)。
**那个"RTOS"的典型用法,**在FreeRTOS/uCOS等RTOS中:
- MSP:给PendSV、SysTick、硬件中断用(栈空间小,固定)
- PSP:给每个用户任务分配独立的栈(每个任务有自己的栈数组)
任务切换时,RTOS保存当前任务的PSP,恢复下一个任务的PSP。中断永远用MSP,不受任务切换影响。
**那个"栈溢出"的检测,**两个栈分开,检测溢出也更容易。
- MSP溢出 → 通常是中断嵌套太深或中断函数里定义了超大局部变量
- PSP溢出 → 通常是任务栈分配太小或函数调用嵌套太深
知道哪个栈溢出,问题就锁定了一半。

这个故事的启示, 为什么需要MSP和PSP两个栈指针?因为中断和任务对栈的需求不同 。中断需要快速、确定 ,栈小但固定。任务需要灵活、独立 ,栈可以动态调整。双栈让它们各行其道,互不干扰 。这是RTOS能够稳定运行的基础。
写在最后, 下次你调试RTOS的栈溢出,别只盯着总栈大小。想想是MSP溢出还是PSP溢出。中断栈溢出 → 改启动文件的栈大小。任务栈溢出 → 改任务的栈数组大小。分清是谁的栈,问题就解决一半。
(本文灵感源于于振南《新概念ARM32单片机》教程第5.3节"程序现场的存储与恢复:栈与MSP"和第5.8节"异常、栈与NVIC核心解析",感谢作者将双栈机制的奥秘讲得如此通透。)
如果您觉得这个故事对您有启发,欢迎点赞、转发,让更多工程师看到这个藏在MSP/PSP背后的"各行其道"智慧。