目录
1.摘要
针对复杂边界区域内多无人机搜攻任务的适应性难题,以及传统网格分区法受粒度变化影响导致的稳定性不足,本文提出一种分形智能自组织任务规划算法(FISOMP),该算法深度融合了中心化任务分配、覆盖路径规划与分布式攻击协调机制,利用分形分解技术实现对任意尺度复杂边界环境的自适应表征。通过引入最优分形粒度函数,在满足无人机扇形探测载荷约束与连续航迹飞行需求的同时,消除了人工配置网格参数的依赖。
2.多无人机搜索攻击任务问题描述
复杂边界任务区域
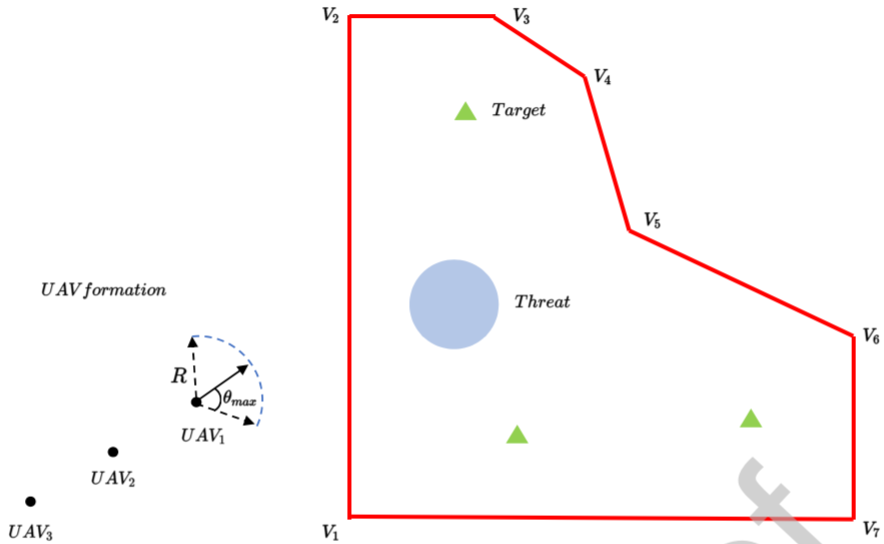
针对由多边形构成的复杂边界任务区域,相较于传统算法中常见的规则矩形边界,本文探讨多边形边界在实际场景中更具普适性 ,但其形状的非规则特征也对任务规划算法提出了更高要求。为精确建模真实环境下的搜攻任务,本文设定如下准则:任务集群由具备同等飞行性能、探测攻击能力及载荷续航的齐次无人机组成;集群自基地起飞后以恒定高度及匀速直线阵位驶向目标区。在该二维平面模型中,任务区域表征为由若干顶点构成的任意多边形,无人机探测效能受限于特定的探测半径及扇形视场约束,且飞行轨迹需严格遵循最大转弯角等机动性限制。
任务约束优化模型
本文将多无人机搜攻击任务规划归纳为受多重约束限制的复杂优化问题,并将约束条件解构为平台自约束( C S C_S CS)与任务环境约束( C T C_T CT)。在平台自约束方面,通过建立速度区间约束:
v i ( t ) ∈ v ∣ v m i n ≤ v ≤ v m a x v_i(t) \in v \\mid v_{min} \\leq v \\leq v_{max} vi(t)∈v∣vmin≤v≤vmax
及最大转弯角限制,精确刻画无人机的机动特性。
引入综合考量剩余航程与返航安全性的距离约束,并结合单机弹药载荷上限设定攻击效能约束。在任务约束层面,算法协同处理基于通信拓扑的机间防撞需求及针对环境威胁源的规避要求:
∥ P i ( t ) − P t h r e a t n ∥ > R n \|P_i(t) - P^n_{threat}\| > R_n ∥Pi(t)−Pthreatn∥>Rn
3.提出的算法
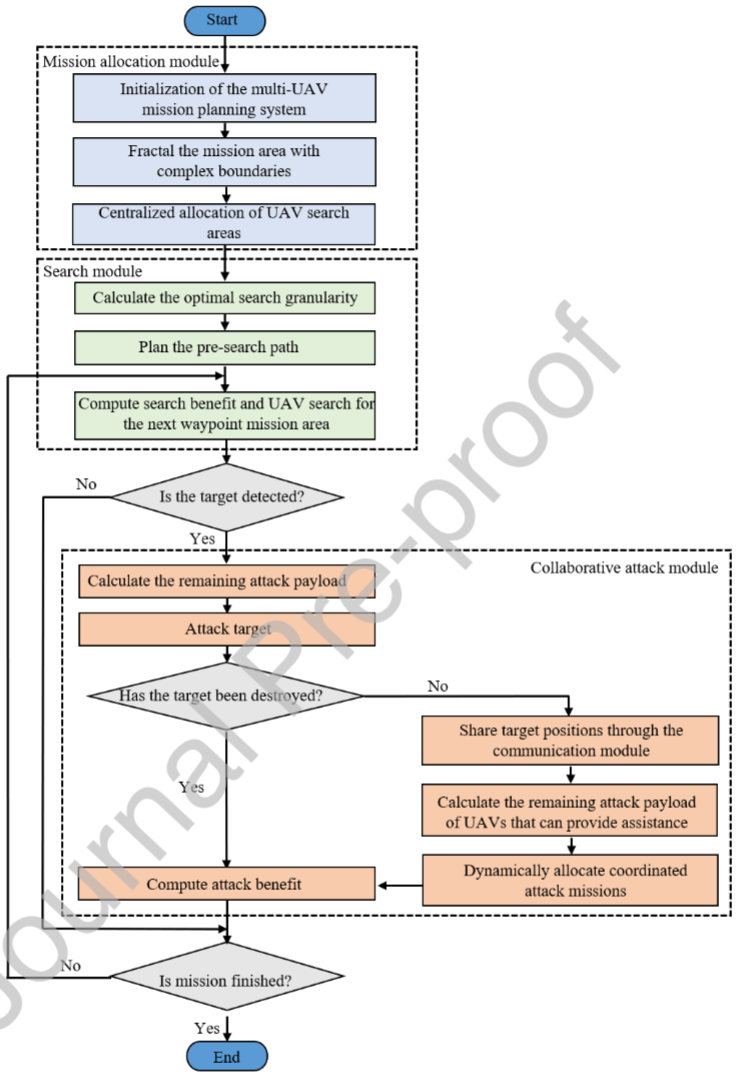
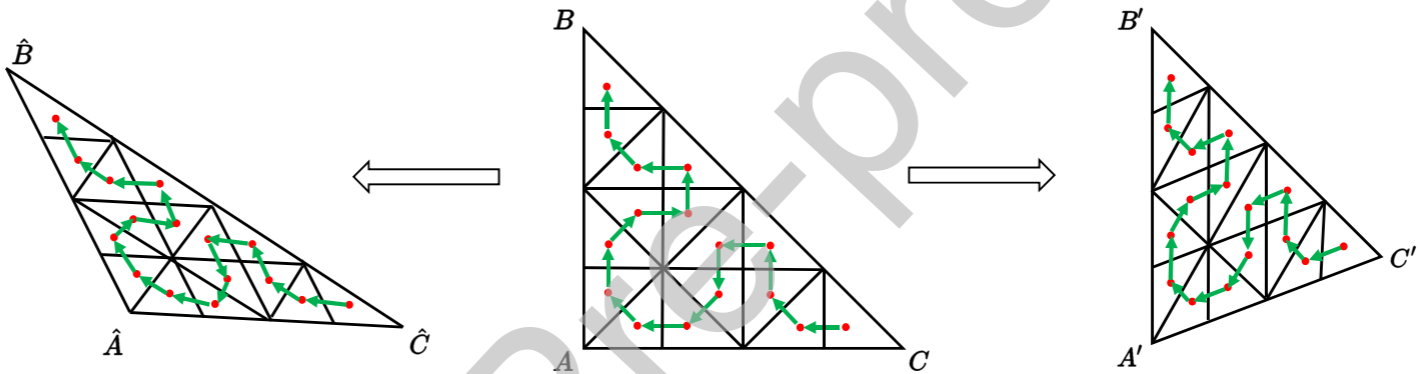
基于空间分形的优化任务规划
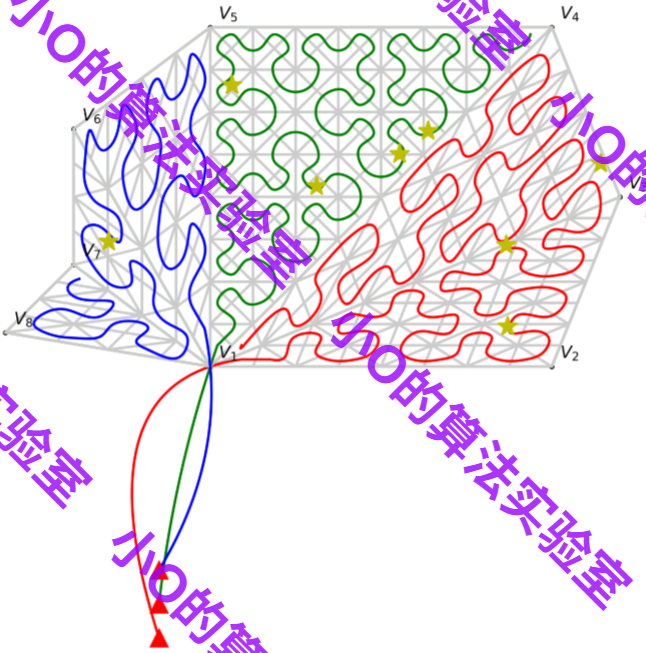
针对复杂边界区域的任务规划,本文提出一种基于空间分形分解与自组织机制的优化算法,利用三角部分技术将任意多边形任务区解构为若干三角形子域,并以集群位姿与顶点间的最小总距离为判据,通过下式确定起始作业点:
d m i n = min j ∈ { 1 , 2 , . . . , N v } ( ∑ i = 1 N u ∥ P i ( t ) − V j ∥ ) d_{min}=\min_{j\in\{1,2,...,N_v\}}\left(\sum_{i=1}^{N_u}\|P_i(t)-V_j\|\right) dmin=j∈{1,2,...,Nv}min(i=1∑Nu∥Pi(t)−Vj∥)
在子域分配环节,算法通过遍历组合优化单机任务载荷平衡,确保各观测区域面积差值最小。核心规划层引入Sierpinski分形机制,将标准三角形搜索路径映射至目标海域:
P ^ p a t h = { p ^ i = α β γ ϵ ζ η 0 0 1 p i ∣ i = 1 , 2 , ... , N I } \hat{P}_{path}=\left\{\hat{p}_i=\begin{bmatrix}\alpha&\beta&\gamma\\\epsilon&\zeta&\eta\\0&0&1\end{bmatrix}p_i\mid i=1,2,\ldots,N_I\right\} P^path=⎩ ⎨ ⎧p^i= αϵ0βζ0γη1 pi∣i=1,2,...,NI⎭ ⎬ ⎫
为消除人工调参依赖,本文构建了最优分形粒度函数,在满足传感器覆盖约束的同时兼顾计算效率。针对动态搜攻决策,算法通过整合覆盖率评价与带有弹药损耗衰减因子的攻击效能函数,实现任务权重的自适应调节。当单机载荷耗尽时,通过通信链路触发分布式协同攻击机制
J A = ∑ i = 1 N a ( ∑ t = 0 T ( 1 − ω i ) N A − A i ( t ) N A J a i + max j ∈ N i ( t ) ∑ A j ( t ) N A ω j N A − A j ( t ) N A J a j ) J_A=\sum_{i=1}^{N_a}\left(\sum_{t=0}^T(1-\omega_i)\frac{N_A-A_i(t)}{N_A}J_a^i+\max_{j\in N_i(t)}\left\\sum_{A_j(t)}\^{N_A}\\omega_j\\frac{N_A-A_j(t)}{N_A}J_a\^j\\right\right) JA=i=1∑Na t=0∑T(1−ωi)NANA−Ai(t)Jai+j∈Ni(t)max Aj(t)∑NAωjNANA−Aj(t)Jaj
4.结果展示
5.参考文献
Zhou, You, et al. "Fractal intelligence self-organized mission planning for multi-UAV cooperative search-attack in complex boundaries." Aerospace Science and Technology (2025): 111183.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx