MPC 是一类先进的控制算法,广泛应用于具有复杂约束、多输入多输出的动态系统中。以下为你详细拆解 MPC 的核心知识体系:
一、 MPC 的核心思想
MPC 并不是单一的算法,而是一种控制策略。它的核心思想可以用三个词概括:预测、优化、滚动 。
简单来说:在每一个当前时刻,MPC 根据系统的当前状态,利用一个数学模型来"预测"未来一段时间内系统的表现;然后在这个预测窗口内,求解一个"最优"的控制动作序列,使得系统的表现最符合预期;最后,只执行这个序列中的第一个控制动作。到了下一个时刻,再次获取系统的新状态,重复上述过程。
二、 MPC 的三大基本组件
1. 预测模型 (Predictive Model)
这是 MPC 的基础。我们需要一个数学模型来描述系统的动态行为,以便推演未来。在控制工程中,最常用的是离散时间的状态空间模型:
x(k+1)=Ax(k)+Bu(k)x(k+1) = Ax(k) + Bu(k)x(k+1)=Ax(k)+Bu(k)
y(k)=Cx(k)y(k) = Cx(k)y(k)=Cx(k)
其中,xxx 是状态变量,uuu 是控制输入,yyy 是输出。通过这个模型,只要知道当前状态 x(k)x(k)x(k) 和未来的输入序列 u(k),u(k+1),...u(k), u(k+1), ...u(k),u(k+1),...,就可以预测出未来时刻的状态 x(k+1),x(k+2),...x(k+1), x(k+2), ...x(k+1),x(k+2),...。
2. 滚动优化 (Rolling Optimization)
这是 MPC 与传统控制(如 PID)最大的区别。MPC 会在每个采样时刻 kkk,在线求解一个带有约束的优化问题。
通常会定义一个代价函数 (Cost Function) JJJ,目标是使其最小化。典型的代价函数会考虑"跟踪误差"(希望输出尽可能贴近参考值)和"控制能量"(不希望控制动作过于剧烈):
J=∑i=1Np∥y(k+i∣k)−r(k+i)∥Q2+∑i=0Nc−1∥Δu(k+i∣k)∥R2J = \sum_{i=1}^{N_p} \|y(k+i|k) - r(k+i)\|Q^2 + \sum{i=0}^{N_c-1} \|\Delta u(k+i|k)\|_R^2J=i=1∑Np∥y(k+i∣k)−r(k+i)∥Q2+i=0∑Nc−1∥Δu(k+i∣k)∥R2
- NpN_pNp:预测时域 (Prediction Horizon),即我们往未来看多远。
- NcN_cNc:控制时域 (Control Horizon) ,即我们规划未来几步的控制动作(通常 Nc≤NpN_c \le N_pNc≤Np)。
- Q,RQ, RQ,R:权重矩阵,用于权衡跟踪精度和控制代价。
- 同时,优化过程会受到严格的物理约束 (如电机的最大扭矩、电池的 SOC 上下限、方向盘的最大转角等):
umin≤u(k+i)≤umaxu_{min} \le u(k+i) \le u_{max}umin≤u(k+i)≤umax
xmin≤x(k+i)≤xmaxx_{min} \le x(k+i) \le x_{max}xmin≤x(k+i)≤xmax
3. 反馈校正 (Feedback Correction)
由于现实世界中存在模型失配(模型不可能100%精确)和外部干扰,预测的结果往往会产生偏差。MPC 通过只执行最优控制序列的第一步 u∗(k)u^*(k)u∗(k) ,并在下一个时刻 k+1k+1k+1 重新测量系统的实际状态 x(k+1)x(k+1)x(k+1) 作为新的初始起点,再次进行预测和优化。这种"闭环"机制极大地增强了系统的鲁棒性。
三、 经典应用场景解析
为了让理论更直观,我们将 MPC 代入到实际的控制场景中:
- 车辆轨迹跟踪 (自动驾驶控制): 目标是让车辆沿着规划好的参考路径行驶。状态变量 xxx 可能是车辆的位置、航向角、横摆角速度;控制输入 uuu 是方向盘转角和加速度。MPC 会预测当前打方向盘后,未来几秒车辆的轨迹,并通过优化算法计算出一条既能紧贴参考路径,又不会让方向盘转动过于剧烈(保证乘坐舒适度),且满足车辆动力学极限(防侧滑)的转向指令。
- 混合动力汽车 (HEV) 能量管理:
目标是在满足驾驶员动力需求的前提下,尽量降低油耗。状态变量通常包括电池的 SOC;控制输入是发动机和电机的功率分配比例。MPC 结合未来的车速预测或路况信息,在有限的预测时域内寻找最优的功率分配策略,同时确保电池的 SOC 始终保持在健康区间内,发动机工作在高效区。
四、 MPC 的优缺点
- 优势: * 天生适合处理多输入多输出 (MIMO) 系统。
- 最强杀手锏:能够显式、主动地处理硬约束条件(这是 LQR 或 PID 很难做到的)。
- 控制效果通常非常平滑且具有前瞻性。
- 挑战:
- 计算量极大。因为需要在每一个极短的控制周期内(如几十毫秒)在线求解一个二次规划 (QP) 等复杂的优化问题,这对车载控制器等硬件的算力要求非常高。
收到!今天的"基础补课"火力全开。既然大纲已经明确,我就直接切换到"导师/学长"模式,按你的框架逐一攻克。特别是第三部分,我会用标准的学术论文综述口吻来写,方便你直接摘录和修改。
1. MPC 复盘:预测、优化与约束
既然刚才已经预热过,我们在这里做最核心的提炼,这三点也是你写论文和做汇报时必须讲清楚的逻辑主线:
- 预测模型 (Predictive Model):系统的"内视镜"
MPC 不盲目执行,它需要一个内部的数学模型来"推演"未来。通常在离散状态空间下表示为 x(k+1)=Ax(k)+Bu(k)x(k+1) = Ax(k) + Bu(k)x(k+1)=Ax(k)+Bu(k)。通过这个模型,只要给定未来的输入序列,就能预知未来 PPP 步(预测时域)的状态走向。 - 滚动优化 (Rolling Optimization):在线的"纠错引擎"
在每个采样时刻,系统都会在线求解一个二次规划 (QP) 问题,目标是让未来一段时间内的输出紧紧跟随参考轨迹,同时最小化控制能量。关键动作是"只走第一步",随后将系统真实状态作为下一步的初值,重新预测。这种滚动机制是 MPC 具备强鲁棒性的核心。 - 约束条件 (Constraints):MPC的"杀手锏"
这是传统 PID 或 LQR 难以企及的功能。在车辆控制中,物理极限是死线(如电池 SOC 必须在 0.3,0.80.3, 0.80.3,0.8 之间,电机最大功率有限制)。MPC 能够将这些硬约束直接转化为优化问题的不等式条件,显式地保证系统在安全边界内运行。
2. Matlab:mpcToolbox 基础速通
在 Matlab 中调用 MPC Toolbox,核心就是建立和配置 mpc 对象。不需要从头手写庞大的二次规划求解器,掌握以下标准"五步走"工作流即可:
Step 1: 定义被控对象模型 (Plant Model)
首先需要一个线性时不变 (LTI) 模型,通常是状态空间或传递函数。
matlab
% 定义连续时间状态空间模型矩阵
A = [...]; B = [...]; C = [...]; D = [...];
plant = ss(A, B, C, D);Step 2: 创建 MPC 对象
设定采样时间和预测/控制时域。
matlab
Ts = 0.1; % 采样时间
p = 20; % 预测时域 (Prediction Horizon)
m = 5; % 控制时域 (Control Horizon)
mpcobj = mpc(plant, Ts, p, m);Step 3: 设置硬约束 (Constraints)
约束分为操纵变量 (MV, 即控制输入) 和被控变量 (OV, 即系统输出)。
matlab
% 设置控制输入的上下限和变化率限制
mpcobj.MV(1).Min = -10;
mpcobj.MV(1).Max = 10;
mpcobj.MV(1).RateMin = -2; % 防止控制动作过于突变
% 设置输出变量的安全区间
mpcobj.OV(1).Min = 0.3; % 例如电池SOC下限Step 4: 调节权重矩阵 (Weights)
告诉求解器"跟踪精度"和"控制能耗"哪个更重要。
matlab
% 权重越大,惩罚越重
mpcobj.Weights.OV = [10]; % 强迫输出紧跟参考值
mpcobj.Weights.MV = [0.1]; % 允许控制量有一定的灵活度Step 5: 闭环仿真验证
可以直接在命令行跑,也可以导入 Simulink 使用 MPC Controller 模块。
matlab
% 命令行简易仿真
T_sim = 100; % 仿真步数
r = ones(T_sim, 1); % 参考轨迹
sim(mpcobj, T_sim, r);3. 精读 EMS 综述:整理 10 类方法(可直接抄改的学术表述)
针对混合动力汽车/新能源汽车的能量管理策略(EMS),以下为你整理了 10 类主流方法的学术性综述语料,涵盖了规则型、优化型到前沿的学习型方法,你可以直接提取并根据你的研究侧重点进行微调:
一、 基于规则的策略 (Rule-based Strategies)
1. 确定性规则控制 (Deterministic Rule-based)
"基于确定性规则的能量管理策略依赖于专家的工程经验,通过提取发动机最优工作曲线 (OOL) 或设定静态逻辑阈值(如恒温器策略、功率跟随策略)来实现能量分配。该类方法计算负担极小,易于实车微控制器部署;但由于阈值参数缺乏对动态多变工况的适应性,难以保证整车燃油经济性的全局最优。"
2. 模糊逻辑控制 (Fuzzy Logic Control)
"模糊逻辑控制通过模糊化、模糊推理和清晰化过程,将驾驶员意图和车辆状态转化为非线性控制规则。相较于确定性规则,其具有更强的鲁棒性和平滑度,但模糊规则库的构建及隶属度函数的划分高度依赖人工调校,且同样无法保证理论上的最优化结果。"
二、 基于优化的策略 (Optimization-based Strategies)
3. 动态规划 (Dynamic Programming, DP)
"动态规划基于贝尔曼最优性原理,在预知全局行驶工况的前提下,逆向递推求解能量分配的全局最优控制序列。尽管 DP 面临严重的'维数灾难'且无法直接应用于实时控制,但其求解结果常被学术界作为评估其他实时 EMS 经济性潜力的'离线最优基准'。"
4. 庞特里亚金极小值原理 (Pontryagin's Minimum Principle, PMP)
"PMP 通过引入协态变量,将受约束的全局优化问题转化为瞬时哈密顿函数的极小化问题,大幅削减了计算量。然而,在具有复杂非线性特性的车辆动力学模型中,协态变量的初始值寻优极为困难,且对工况先验知识的依赖限制了其泛化能力。"
5. 等效消耗最小策略 (Equivalent Consumption Minimization Strategy, ECMS)
"ECMS 引入等效因子将电池电能消耗折算为燃油消耗,从而在每一瞬时最小化总等效油耗。该方法具备极佳的实时性,但核心痛点在于固定等效因子对工况极度敏感。因此,当前研究多转向自适应 ECMS (A-ECMS),通过引入工况识别或 SOC 反馈机制在线动态调节等效因子。"
6. 模型预测控制 (Model Predictive Control, MPC)
"模型预测控制结合了工况预测与滚动优化机制,在有限的预测时域内求解多目标优化问题。MPC 的突出优势在于能够显式地处理电池 SOC 和部件功率等物理硬约束,同时兼顾燃油经济性与系统状态的安全边界,是实现前瞻性实时最优控制的主流理论框架。"
7. 元启发式与群智能优化算法 (Meta-heuristic Optimization)
"针对多模式切换控制或规则参数寻优等高度非线性问题,元启发式算法展现出跳出局部最优的强力特性。例如遗传算法 (GA)、粒子群算法 (PSO) 以及具有优异全局探索与局部开发平衡能力的蜣螂优化算法 (Dung Beetle Optimizer, DBO) 等,常被用于离线优化系统阈值,有效提升了复杂非线性控制参数整定的效率。"
三、 基于学习与数据驱动的策略 (Learning-based Strategies)
8. 无模型强化学习 (Model-free Reinforcement Learning)
"强化学习通过智能体与环境的马尔可夫决策过程 (MDP) 交互试错来学习最优策略,彻底摆脱了对高精度被控对象数学模型的依赖。近年来,针对连续动作空间的车辆控制,基于演员-评论家 (Actor-Critic) 架构的深度强化学习算法(如 近端策略优化 Proximal Policy Optimization, PPO)展现出了卓越的自适应学习能力与抗干扰鲁棒性。"
9. 结合信号预处理的深度网络预测 (Deep Learning with Signal Pre-processing)
"面对实际驾驶工况中功率需求的强非平稳性和高频噪声,单一的学习模型往往容易出现特征提取瓶颈。因此,前沿研究引入了先进的信号分解技术(如 变分模态分解 Variational Mode Decomposition, VMD)对瞬态功率需求进行有效降噪和模态分离,随后将其作为神经网络或强化学习智能体的输入,显著提升了策略在复杂工况下的决策精度与泛化能力。"
10. 分层协同与混合能量管理 (Hierarchical & Hybrid Strategies)
"鉴于单一策略的局限性,构建分层协同框架成为当前 EMS 研究的重要趋势。例如,上层利用数据驱动模型预测未来车速或功率需求,中层采用 MPC 或强化学习进行时域内的能量滚动优化,下层执行具体的工况模式切换。这种混合架构有效兼顾了全局燃油经济性、系统计算效率与硬约束安全性。"
第一部分,我们先解决工程落地的问题:在 Matlab 里如何把现实中车辆的物理极限,用代码严谨地写进 MPC 的约束里。第二部分,我们把目光放到科研前沿,详细拆解 VMD、PPO 以及 DBO 这些算法在实际的车辆能量管理策略(EMS)中到底是怎么打配合的。
一、 Matlab mpcToolbox:约束条件 (Constraints) 的高阶写法
在车辆控制中,约束主要分为两类:操纵变量约束 (MV, 控制输入) 和 被控变量约束 (OV, 系统状态/输出) 。我们以一个简化的混合动力能量分配场景为例:假设操纵变量 MV(1) 是发电机扭矩指令,被控变量 OV(1) 是电池组的 SOC。
1. 操纵变量 (MV) 的绝对界限与变化率限制
电机不能超载,且扭矩不能突变(否则会引起车辆顿挫,损坏传动轴)。
matlab
% 1. 绝对幅值限制 (Hard Constraints)
% 例如:发电机扭矩被限制在 -50 Nm 到 200 Nm 之间
mpcobj.MV(1).Min = -50;
mpcobj.MV(1).Max = 200;
% 2. 变化率限制 (Rate Constraints) - 非常关键!
% 例如:在一个采样周期内,扭矩的变化量不能超过 10 Nm
mpcobj.MV(1).RateMin = -10;
mpcobj.MV(1).RateMax = 10;2. 被控变量 (OV) 的软硬约束
电池的 SOC 必须维持在健康区间(比如 0.3 到 0.8)。但在实际行驶中,如果遇到连续长下坡,SOC 可能会短暂突破 0.8。如果把 OV 设置为绝对的"硬约束"(Hard Constraint),求解器一旦发现预测域内 SOC 会越界,就会直接报错"无可行解 (Infeasible)",导致控制器崩溃。
解决办法:使用"软约束" (Soft Constraints) 和松弛变量 (ECR)。
我们允许 SOC 稍微越界,但只要越界,就在代价函数里给予极其严厉的惩罚。
matlab
% 设定 SOC 的理想上下限
mpcobj.OV(1).Min = 0.3;
mpcobj.OV(1).Max = 0.8;
% 设定极大的 MinECR 和 MaxECR (Equal Concern for Relaxation)
% ECR 值越小,表示该约束越"硬"。如果不设置,默认是软约束,但惩罚力度可能不够。
% 这里我们显式地让软约束变得"几乎像硬约束一样严格"
mpcobj.OV(1).MinECR = 0.001;
mpcobj.OV(1).MaxECR = 0.001;3. 动态约束 (Custom/Time-varying Constraints)
如果电机的最大扭矩是随着当前转速变化的(外特性曲线),那固定的 .Max 就不够用了。在 Simulink 的 MPC 模块中,可以通过勾选 Custom constraints 或开放外部输入端口 md (Measured Disturbances),将实时查表得到的最大扭矩动态馈入 MPC 求解器。
二、 前沿算法在混合动力 EMS 中的实战思路拆解
这几年 EMS 的研究重心已经从传统的规则和纯数学优化,转移到了**"信号处理 + 强化学习 + 群智能优化"**的组合拳上。我们来看看 VMD、PPO 和 DBO 是如何在一个高级的能量管理框架中各司其职的。
1. 变分模态分解 (VMD):理清混乱的能量需求
痛点: 实车在城市里开,走走停停,驾驶员踩踏板产生的"整车需求功率"是一个包含了大量高频噪声(突踩油门/刹车)和低频趋势(匀速巡航)的非平稳信号。如果把这团乱麻直接丢给控制策略,很容易造成发动机频繁启停或者挡位乱跳。
VMD 的作用 (信号预处理):
就像用三棱镜把白光分成七色光,VMD 可以将杂乱无章的原始需求功率信号,自适应地分解成若干个具有特定中心频率的本征模态函数 (IMF)。
- 高频 IMF (瞬态功率): 比如急加速那几秒的功率尖峰。这部分能量需求应当分配给响应极快、不怕大电流冲击的超级电容或高压电池来承担。
- 低频 IMF (稳态功率): 比如长时间稳定在 60km/h 的巡航功率。这部分应当分配给发动机(或燃料电池),让它长时间稳定在最高效的区间工作。
经过 VMD 的清洗和分类,后续的控制算法就能做到"有的放矢"。
2. 近端策略优化 (PPO):无模型的连续控制大脑
痛点: 传统的 DP 无法实时,MPC 遇到非线性严重的车辆动力学模型时求解速度慢。我们需要一个既能实时输出,又能处理连续动作(比如连续调节发动机扭矩比例)的算法。
PPO 的作用 (在线能量分配):
作为 Actor-Critic 架构下的明星强化学习算法,PPO 负责接管核心的能量流分配。
- 状态空间 (State): 当前的车速、电池 SOC、以及 经过 VMD 分解后提取的功率特征。
- 动作空间 (Action): 输出一个 −1,1-1, 1−1,1 之间的连续值,代表发动机和电机的功率分流比例。
- 优势: 相比于早期的 DDPG 或其他算法,PPO 最大的特点是引入了截断机制(Clipping),限制了每次策略更新的幅度。在车辆 EMS 这种对稳定性要求极高的场景中,PPO 的训练过程不会出现断崖式的崩溃,收敛更加平稳,最终学到的控制策略也更加顺滑。
3. 蜣螂优化算法 (DBO):非线性系统的高效"调音师"
痛点: 无论是复杂的模式切换逻辑,还是强化学习中的奖励函数权重设置,或者是 PPO 网络的超参数,都存在大量的非线性参数需要整定。靠人工试凑,费时费力且很难找到全局最优。
DBO 的作用 (离线参数寻优):
在众多群智能优化算法中,DBO(蜣螂优化)模拟了蜣螂滚粪球、跳舞、觅食、偷窃等行为。
- 应用场景------模式切换控制优化: 混动车辆在纯电、串联、并联模式之间切换时,存在复杂的逻辑阈值(例如:车速大于多少且 SOC 小于多少时启动发动机)。利用 DBO 算法出色的全局探索(跳出局部最优)和局部开发(精细搜索)能力,可以将整车的 WLTC 综合油耗作为适应度函数,让 DBO 在离线仿真环境中自动寻找出那组最完美的模式切换阈值参数。
总结一下这套组合拳的逻辑闭环:
在系统底层,利用 DBO 算法离线把模式切换的参数和控制器权重调到最佳;在车辆实时运行中,首先用 VMD 将复杂的驾驶需求剥丝抽茧,提取清晰的频率特征;最后把这些特征喂给训练好的 PPO 智能体,由 PPO 瞬间做出最优的连续功率分配决策。这样就兼顾了系统的抗干扰能力、响应速度和燃油经济性。
场景设定:
你正驾驶一辆混合动力汽车在晚高峰的市区行驶。路况很复杂,一会儿等红灯,一会儿缓慢跟车,偶尔前车让出空挡,你需要一脚油门快速超车。
1. 出厂前/离线阶段:DBO(蜣螂优化)在"后台调参"
在这辆车上路之前,也就是你在实验室做仿真的阶段,DBO 就已经开始工作了。
- 它的任务: PPO 算法里有很多超参数(比如学习率、折扣因子),车辆本身也有一些基础的物理保护阈值。靠人工去猜这些参数,很难达到最省油的效果。
- 具体动作: DBO 模拟了几千次这辆车在各类工况下的行驶。它像蜣螂寻找最优路径一样,不断迭代试错,最终找到了一组能让整车百公里综合油耗最低的模型参数和切换阈值。把这组最优参数烧录到车载控制器里,DBO 的任务就完成了。
2. 路上实时行驶:VMD(变分模态分解)在"梳理乱麻"
现在你正在开车。你看到前方有空挡,猛踩了一脚油门准备超车。
- 此时的状况: 这一脚油门产生了一个极其陡峭的"瞬间高功率需求"。如果不做处理直接丢给系统,发动机可能就会被迫瞬间猛烈拉高转速,不仅噪音大、油耗高,而且还会有顿挫感。
- 具体动作: VMD 瞬间介入。它像一个智能滤波器,把这个复杂的功率需求信号"拆解"了:
- 高频部分(突变信号): "猛踩油门"这个瞬间的突变需求被剥离出来。
- 低频部分(基础信号): 车辆维持当前车速的基础功率需求被单独列出。
3. 毫秒级决策:PPO(近端策略优化)在"排兵布阵"
VMD 拆解完信号后,立刻交给了系统的大脑------经过 DBO 优化过参数的 PPO 智能体。
- 具体动作: PPO 观察了一下当前的状态(电池 SOC 还有 60%,车速 40km/h),并接过了 VMD 递过来的"分类报告"。
- PPO 瞬间做出决策并输出连续控制指令:
- "电池和电机兄弟,你们响应速度快,把 VMD 拆出来的高频突变需求接管过去,瞬间输出大扭矩帮车主超车!"
- "发动机老哥,你不用着急拉高转速,你只需要平稳地输出 VMD 拆出来的低频基础需求,舒舒服服地待在你的最高效工作区间就行。"
最终的结果:
你感觉超车动力随叫随到,非常平顺;同时发动机没有像传统燃油车那样嘶吼,车辆的整体油耗被压到了最低。
为了让你能快速上手,我们以你最熟悉的混合动力汽车 (HEV) 能量管理为例,在 Simulink 中搭建一个最基础的**"基于 MPC 的功率分配策略"**模型。
这个例子的核心目标是:在已知驾驶员需求功率的前提下,MPC 决定发动机出多少力,剩下的由电池(电机)补齐,同时保证电池的 SOC 维持在健康区间。
第一步:在 MATLAB 工作区"捏"出控制器 (m 文件准备)
Simulink 中的 MPC 模块不能空跑,它需要你在 MATLAB 工作区先定义好模型对象 (mpcobj)。
假设我们建立一个极简的电池 SOC 动态模型:
状态量 xxx 为 SOC,控制量 uuu 为发动机功率 PengP_{eng}Peng,可测扰动 vvv 为整车需求功率 PreqP_{req}Preq。
电池消耗的功率为 Pbat=Preq−PengP_{bat} = P_{req} - P_{eng}Pbat=Preq−Peng。SOC 的变化率与电池充放电功率成正比(这里用系数 KKK 简化表示)。
在 MATLAB 命令行中输入:
matlab
% === 修复后的完整 mpcobj 创建脚本 ===
% 0. 定义物理转换系数 K
K = 0.005; % 假设的电量转换系数(实际整车模型中由电池包参数决定)
% 1. 定义简化被控对象 (Plant) 的状态空间模型
A = 0;
B = [K, -K]; % 输入矩阵:第一列对应发电机功率 Peng,第二列对应需求功率 Preq
C = 1; % 输出矩阵:输出为 SOC
D = [0, 0];
plant = ss(A, B, C, D);
% 告诉系统哪个通道是控制量,哪个是外部扰动
plant.InputGroup.ManipulatedVariables = 1; % 通道1 (Peng) 是我们可以主动控制的
plant.InputGroup.MeasuredDisturbances = 2; % 通道2 (Preq) 是驾驶员踩出来的可测扰动
% 2. 创建 MPC 对象
Ts = 0.1; % 控制系统的采样时间 (秒)
p = 20; % 预测时域 (往未来看20步)
m = 5; % 控制时域 (规划未来5步的动作)
mpcobj = mpc(plant, Ts, p, m);
% 3. 设置硬约束与软约束
mpcobj.MV(1).Min = 0; % 发动机不能反转吸收功率
mpcobj.MV(1).Max = 50; % 假设发动机最大输出功率为 50kW
mpcobj.OV(1).Min = 0.3; % 电池 SOC 的安全下限
mpcobj.OV(1).Max = 0.8; % 电池 SOC 的安全上限
% 4. 设置权重参数 (Cost Function 的灵魂)
mpcobj.Weights.MVRate = 0.5; % 惩罚项:抑制发动机功率瞬间猛增或猛降
mpcobj.Weights.OV = 10; % 惩罚项:强制要求 SOC 紧紧跟随我们设定的参考值(比如0.6)
disp('MPC对象 mpcobj 创建成功!可以在工作区查看。');第二步:打开 Simulink 搭建可视化连线
在命令行输入 simulink 打开空白画布,我们需要拖入以下几个核心模块:
1. 核心大脑:MPC Controller
- 路径: Simulink Library Browser -> Model Predictive Control Toolbox -> MPC Controller
- 配置: 双击该模块,第一行的 "MPC Controller" 对应的那个空白文本框里。
你只需要在这个框里直接敲入 mpcobj(也就是我们在工作区创建的那个变量名),然后点击右下角的"应用 (A)"或"确定 (O)"就可以了。 - 端口解析:
mo(Measured Output): 接被控对象的实际输出(在这里就是当前反馈回来的 SOC)。ref(Reference): 接参考轨迹(在这里用一个 Constant 模块,输入 0.6,代表我们期望 SOC 维持在 60%)。md(Measured Disturbance): 接外部扰动信号(在这里接驾驶员当前的整车需求功率 PreqP_{req}Preq)。
2. 被控对象:State-Space 或 自定义子系统
- 路径: Simulink Library Browser -> Continuous -> State-Space
- 这里代表真实的车辆动力学和电池系统。在实际科研中,这里通常会被替换成一个复杂的车辆数学模型子系统,或者直接链接到底盘软件。为了验证,你可以直接把工作区里的
A, B, C, D填入这个 State-Space 模块。
3. 工况输入与可视化:
- 需求功率输入: 使用一个
Signal Builder或From Workspace模块,导入一段 WLTC 工况提取出的整车功率需求序列,连接到 MPC 的md端口和 Plant 的对应输入端。 - 示波器 (Scope): 拖入几个 Scope,分别观测:
- 实际的 SOC 变化曲线。
- MPC 输出的发动机功率 PengP_{eng}Peng。
第三步:闭环仿真与观察
将连线全部闭环:
- 需求功率 (md) 和 实际 SOC (mo) 输入给 MPC。
- MPC 经过内部的 QP 优化计算,瞬间吐出最优的 发动机功率 (MV)。
- 发动机功率 和 需求功率 共同作用于 车辆模型 (Plant)。
- 车辆模型输出下一个时刻的 新 SOC,再次反馈给 MPC。
点击 Run 运行仿真。打开 Scope,你会看到:即便需求功率在剧烈波动,MPC 也会非常聪明地"削峰填谷",提前规划发动机的出力,使得 SOC 始终被稳稳地限制在 0.3 到 0.8 之间,并缓慢向 0.6 靠拢。
这就是一个最标准的 MPC 在 Simulink 里的工程落地流。
这是一份"像素级"的 Simulink 搭建指南,我们把这个 HEV 能量管理模型做得更专业一点。
零、 必须确认的前置工作
在点开 Simulink 之前,请务必在 MATLAB 主界面(Command Window)运行一下这段代码,保证你的工作区(Workspace)里躺着 A, B, C, D 和 mpcobj 这 5 个变量:
matlab
K = 0.005;
A = 0; B = [K, -K]; C = 1; D = [0, 0];
plant = ss(A, B, C, D);
plant.InputGroup.ManipulatedVariables = 1;
plant.InputGroup.MeasuredDisturbances = 2;
mpcobj = mpc(plant, 0.1, 20, 5);
mpcobj.MV(1).Min = 0; mpcobj.MV(1).Max = 50;
mpcobj.OV(1).Min = 0.3; mpcobj.OV(1).Max = 0.8;
mpcobj.Weights.MVRate = 0.5; mpcobj.Weights.OV = 10;一、 快捷召唤模块(不用去库里找)
在 Simulink 的空白画布上,直接双击鼠标左键,会出现一个放大镜搜索框。利用这个快捷键,依次输入以下名字并回车,把它们"召唤"到画布上,稍微排布一下位置(从左到右):
- 输入
Constant(作为目标 SOC,放在左上角) - 输入
Sine Wave(作为驾驶员需求功率,放在左下角) - 输入
MPC Controller(作为核心大脑,放在中间) - 输入
Mux(需要召唤 2 个。一个给被控对象用,一个给示波器对比用。分别叫 Mux1 和 Mux2) - 输入
State-Space(作为车辆电池物理模型,放在 MPC 右边) - 输入
Scope(需要召唤 2 个。分别叫 Scope_SOC 和 Scope_Power,放在最右边)
二、 像素级参数配置(双击模块修改)
- Constant(目标SOC) :
- 双击,将
Constant value改为0.6。
- 双击,将
- Sine Wave(需求功率扰动) :
- 双击,
Amplitude(振幅) 填20。 Bias(偏置) 填20。Frequency(频率) 填0.1。- (这表示一个在 0 到 40kW 之间周期性波动的负荷,模拟走走停停。)
- 双击,
- MPC Controller(大脑) :
- 双击,在
MPC Controller文本框填入mpcobj。 - 极其重要 :切换到
Block Options选项卡,勾选Measured disturbance (md)。点击 Apply,你会看到模块多出了一个md输入口。
- 双击,在
- State-Space(物理模型) :
- 双击,
A填A,B填B,C填C,D填D。 - 极其重要 :
Initial conditions(初始状态) 填0.6。如果不填这个,默认是 0,一开局 SOC 就低于 0.3 的下限,MPC 会直接报错崩溃。
- 双击,
三、 手把手连线与"分叉"技巧
现在的连线我们要为了"发论文的数据对比"做准备:
1. 连参考线 (Reference)
- 鼠标按住 Constant 的右侧输出箭头,拖拽连到 MPC Controller 的
ref端口。
2. 连扰动线与分叉 (Disturbance)
- 把 Sine Wave 连到 MPC Controller 的
md端口。 - 信号分叉技巧 :把鼠标放在刚刚连好的这根线上(此时鼠标会变成十字),按住鼠标右键(注意是右键)不放并拖动,就能扯出一条分叉线。
- 把这条分叉线,连到 Mux1 的 第二个入口(也就是下面的那个口)。
- (为了出图好看,你可以再扯出一条分叉线,连到 Mux2 的 第二个入口)。
3. 连控制线 (Control Action)
- 把 MPC Controller 的
mv(发动机功率)输出端,连到 Mux1 的 第一个入口(上面的那个口)。 - 利用右键分叉技巧,从
mv这根线上扯出一条分叉,连到 Mux2 的 第一个入口。
4. 驱动物理模型并闭环
- 此时 Mux1 已经把 Peng,PreqP_{eng}, P_{req}Peng,Preq 打包好了。把 Mux1 的输出端,连到 State-Space 的输入端
u。 - 把 State-Space 的输出端
y(这就是算出来的实际 SOC),连回 MPC Controller 最上面的输入口mo。闭环完成!
5. 连接示波器 (看戏时刻)
- 利用右键分叉技巧,从实际 SOC 的反馈线(
y到mo那根)上扯一条线,连到 Scope_SOC。 - 把 Mux2 的输出端,连到 Scope_Power。
四、 见证 MPC 的"削峰填谷"
- 在 Simulink 正上方的工具栏,把仿真时间(Stop Time)从默认的
10.0改成100。 - 点击绿色的 Run 按钮。
- 双击打开 Scope_Power :
- 你会看到两条线(因为我们用 Mux2 把它们合并了)。
- 一条线是完美的大正弦波,在 0~40 之间剧烈震荡(这是驾驶员瞎踩油门导致的需求 PreqP_{req}Preq)。
- 另一条线是 MPC 输出的发动机功率 PengP_{eng}Peng。你会发现它极其平缓!MPC 为了保护发动机不突变,主动吸收了高频波动。
- 双击打开 Scope_SOC :
- 你会看到 SOC 在 0.6 附近上下波动(因为电池在替发动机承担那些剧烈波动的差额功率)。
- 但无论怎么波动,它都被死死地框在了 0.3 到 0.8 的绝对安全红线内。这就是 MPC 处理硬约束的最直观体现。
这套基础框架跑通后,你可以随时把 State-Space 换成你搭建的复杂的整车纵向动力学模型,把 Sine Wave 换成之前讲的经过 VMD 分解后的高/低频信号。
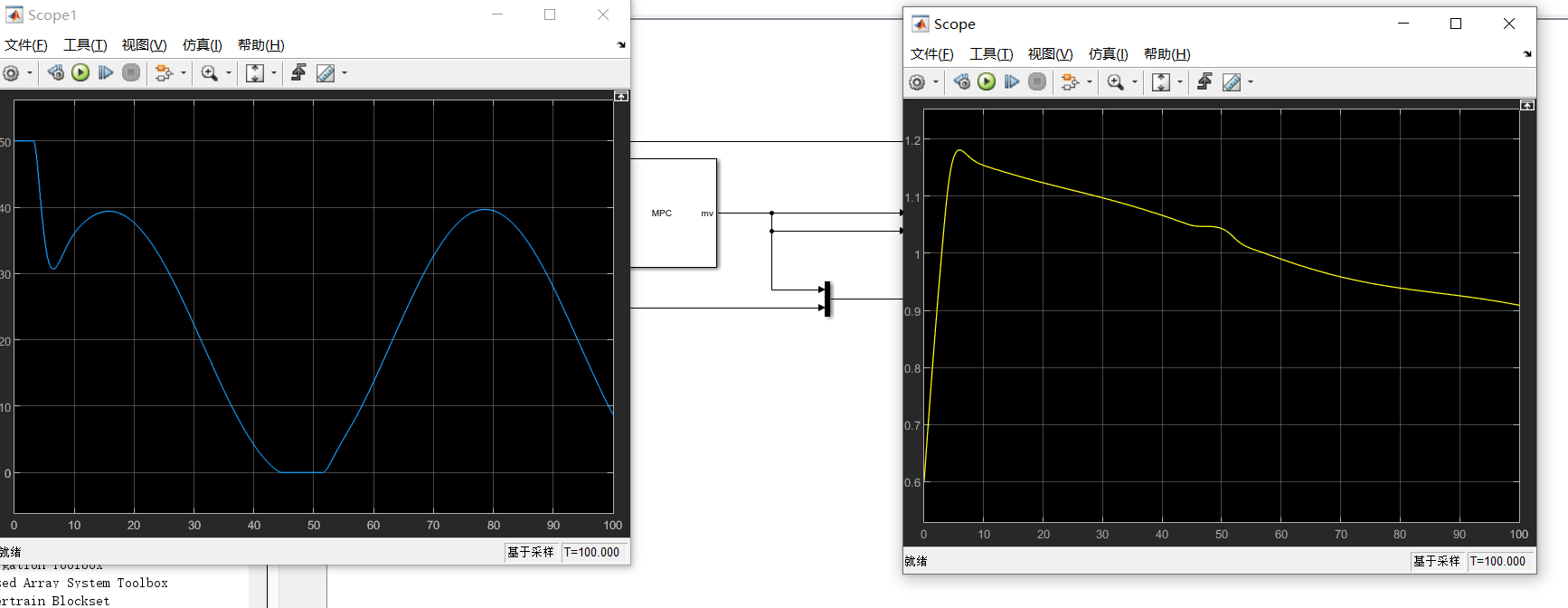
但如果你仔细看示波器结果(Image 1),会发现一个"诡异"的现象:
- 右图 (SOC) :曲线一开始就像火箭一样,直接冲到了 1.2 ,完全无视了我们设置的 0.8 的硬约束上限,然后才慢慢降下来。
- 左图 (发动机功率) :一开始就满载输出 50,持续了大概两秒,然后才猛地掉下来。
你肯定在想:"难道 MPC 的硬约束失效了?"
其实不是约束失效,你踩中了所有刚接触 MPC 工程落地时都会踩的一个经典深坑:初始状态失配 (Initialization Mismatch)。
为什么会"过充"到 1.2?(原理解析)
我们在 State-Space 物理模型里,手动把初始 SOC 设为了 0.6。但是!MPC 控制器内部的观测器(卡尔曼滤波),默认初始状态是 0。
这意味着,在按下 Run 的第 0 秒:
- MPC 大脑以为:现在的 SOC 是 0,离目标 0.6 差得十万八千里!我要赶紧拼命发电!于是它立刻输出了最大功率 50。
- 物理电池实际:我明明已经是 0.6 了,你还给我猛充!于是 SOC 被硬生生推到了 1.2。
- 过了大概两秒,MPC 通过
mo端口的反馈,终于反应过来:"哎呀,原来现实里的 SOC 已经这么高了",它才赶紧把发动机功率降下来,SOC 曲线才开始回落。
极速修复方案(只需两步)
我们需要把 MPC "大脑"里的初始记忆也改成 0.6,让它和现实同步。
第一步:在 MATLAB 命令行运行两行代码
切回 MATLAB 的主界面,在命令行输入下面这两句:
matlab
% 提取当前 mpcobj 的初始状态对象
xc = mpcstate(mpcobj);
% 将内部以为的物理模型初始状态强制同步为 0.6
xc.Plant = 0.6; 运行完后,你的工作区里会多出一个叫 xc 的变量。
第二步:填入 Simulink 模块
双击 Simulink 里的 MPC Controller 模块。
还记得你发的第一张图里,那个名为 Initial Controller State 的空白框吗?现在把 xc 填进这个框里,点击确定。
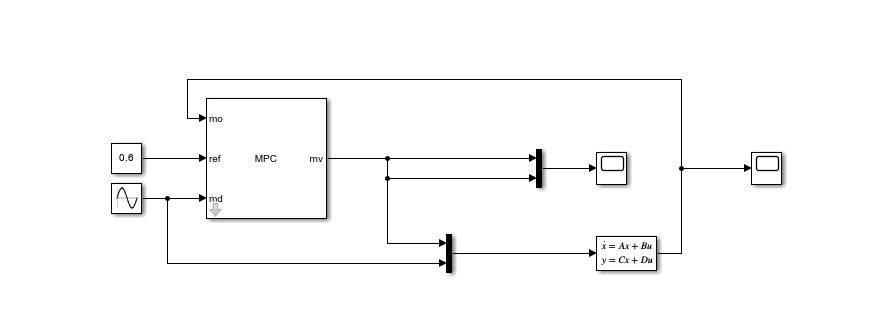
另外一个小优化(为了让左图更好看)
看你的拓扑图(Image 2),中间那个给左边 Scope 用的 Mux,你目前只连了上面那个口(接了 mv),下面那个口空着。所以左边的图里只有一条发动机功率的蓝线。
建议调整:
把 Sine Wave(需求功率)也拉一条线,连到那个 Mux 的下方入口。
这样左边的 Scope 就会同时显示两条线:一条是剧烈波动的驾驶需求,另一条是平稳削峰的发动机出力。把这两条线放在一起对比,放到你的论文里就是非常有说服力的成果图。
按照这两步修改完再点击一次 Run,你应该就能看到一条稳稳维持在 0.3 到 0.8 之间、起步绝不乱飙的完美 SOC 曲线了。