摘要: 在移动机器人的多场景部署中,研发团队常常面临异构 OT(运营技术)网络封闭的技术壁垒。传统的 API 直接对接模式在面对非标物理设备时适应性较弱。本文深度拆解一种基于边缘计算的非侵入式 机器人梯控 架构。探讨如何利用边缘控制节点进行底层的 GPIO 物理隔离,并通过轻量级 MQTT 协议与云端调度系统实现软硬件解耦。结合 Python 实战代码,为架构师提供应对高延迟与异构设备接入的设计参考。
导语: 优秀的系统架构应当具备跨越物理环境限制的韧性。通过在边缘侧引入物理隔离节点重构控制闭环,为复杂的业务调度提供了专业可靠的技术底座,让异构设施的接入变得标准化。探讨 机器人梯控系统 的底层逻辑,有助于提升整体架构的健壮性。
从非标泥潭到规范接口, 机器人梯控 的架构革新

一、 架构挑战:异构环境与网络高延迟
异构楼宇的非标特性是系统集成的核心阻力。针对不同厂家的私有协议定制解析代码,不仅研发周期长,且代码复用率低。同时,广域网链路通常存在数十毫秒的网络延迟。假设系统单次交互总延迟为 T_{total},其基础计算公式为:
T_{total} = T_{net} + T_{process} + T_{mech}
其中 T_{net} 为网络往返延迟,T_{process} 为云端与本地的处理时间,T_{mech} 为继电器等机械件的物理响应时间。若将微观的平层校验逻辑全部放置于云端,较大的 T_{net} 波动会导致控制指令超时。因此,合理的架构应将微观控制下沉至边缘机房节点,向下通过无源干接点(DO)和光耦输入(DI)屏蔽物理差异,向上以 JSON 格式提供统一网络接口。
二、 边缘自治:状态机与防抖算法设计
为了克服弱网环境,边缘节点内部需运行自治的有限状态机(FSM)。云端下发宏观调度指令后,边缘节点接管后续操作,在本地循环检测平层信号。为防止电磁干扰引起的信号误报,引入滑动窗口防抖算法(Debounce)。设输入脉冲信号序列为 I_t \\in \\{0,1\\},在连续 k 次采样周期内的输出确认信号 S_{out} 可表示为连乘模型:
S_{out} = \\prod_{i=0}\^{k-1} I_{t-i}
只有当连续 k 次采样均为高电平时(即 S_{out}=1),状态机才判定到达事件成立。此时即使广域网中断,本地的物理动作序列依然能够安全闭环或执行安全回退,不影响已在轿厢内的设备。
三、 核心代码实战:基于 Python 的边缘节点控制流模拟
以下代码展示了边缘节点如何独立执行本地控制循环,并通过 MQTT 的非阻塞方式与云平台进行指令下发和状态同步:
Python
import time
import json
import threading
import paho.mqtt.client as mqtt
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [EDGE_NODE] - %(message)s')
class HardwareAbstractionLayer:
def __init__(self):
self.sensor_state = False
def get_isolated_input(self):
return self.sensor_state
def trigger_isolated_output(self, pin_id, duration=0.5):
logging.info(f"HAL: Triggering physical relay for pin {pin_id}.")
time.sleep(duration)
class GlobalEdgeController:
def __init__(self):
self.state = "IDLE"
self.mqtt_client = mqtt.Client(client_id="Edge_Node_01")
self.mqtt_client.on_connect = self._on_connect
self.mqtt_client.on_message = self._on_message
self.hal = HardwareAbstractionLayer()
self.lock = threading.Lock()
def _on_connect(self, client, userdata, flags, rc):
logging.info(f"Connected to Cloud Scheduler. RC: {rc}")
client.subscribe("system/elevator/dispatch", qos=1)
def _on_message(self, client, userdata, msg):
try:
task = json.loads(msg.payload.decode())
if msg.topic == "system/elevator/dispatch":
threading.Thread(target=self._execute_local_fsm, args=(task,)).start()
except Exception as e:
logging.error(f"Payload parse error: {e}")
def _execute_local_fsm(self, task):
with self.lock:
if self.state != "IDLE":
logging.warning("Node busy. Ignoring concurrent request.")
return
self.state = "PROCESSING"
target_floor = task.get("target_floor")
logging.info(f"FSM: Executing physical call sequence for Floor {target_floor}.")
self.hal.trigger_isolated_output(target_floor)
timeout = 40.0
start_time = time.time()
while time.time() - start_time < timeout:
if self.hal.get_isolated_input():
logging.info("FSM: Arrival confirmed via debounced sensor.")
self.mqtt_client.publish("system/elevator/status",
json.dumps({"state": "ARRIVED", "floor": target_floor}), qos=1)
with self.lock:
self.state = "IDLE"
return
time.sleep(0.5)
logging.error("FSM: Operation timeout. Rolling back.")
with self.lock:
self.state = "IDLE"
def start_networking(self):
self.mqtt_client.connect_async("cloud.broker.internal", 1883, 60)
self.mqtt_client.loop_start()
if __name__ == "__main__":
controller = GlobalEdgeController()
controller.start_networking()
def simulate_elevator():
time.sleep(5)
controller.hal.sensor_state = True
threading.Thread(target=simulate_elevator).start()
try:
while True:
time.sleep(1)
except KeyboardInterrupt:
controller.mqtt_client.loop_stop()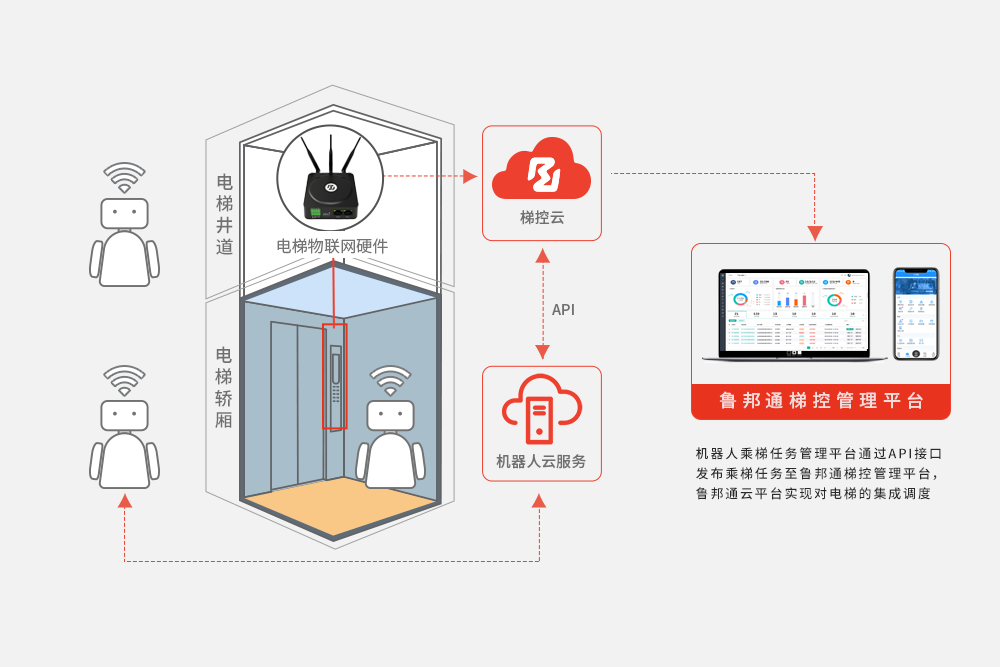
常见问题解答 (FAQ)
问题 1、这种软硬件解耦架构会增加系统部署的物料成本吗?
回答 1、边缘控制节点的引入增加了少量的硬件成本,但省去了向原厂购买软件协议授权的费用,并显著降低了异构适配的研发人力成本,总体经济性优异。
问题 2、云端如何处理不同时区或高延迟节点的调度同步?
回答 2、在分布式系统中,边缘节点上报的状态报文使用统一的 UTC 时间戳,云端流处理引擎据此进行时序对齐和状态分析,消除延迟差带来的干扰。
问题 3、本地发生网络瘫痪时,边缘节点如何确保设备安全?
回答 3、边缘状态机具备本地超时回收机制。当网络断开且本地任务超时后,节点自动切断所有继电器输出,恢复物理设备的原始状态,避免逻辑死锁导致电梯异常占用。
总结: 跨越网络与物理的鸿沟,关键在于剥离对未知异构环境的深度耦合。通过部署非侵入式的边缘控制节点重构物理闭环,工业级架构能够帮助研发团队打造出适应多场景的高可用数据底座。合理应用 机器人梯控 的解耦设计,是实现标准化交付的有效路径。