空间智能上车:新能源OEM决胜「第三空间」的底层技术革命|研发工程师深度解析

简述
智能座舱已进入同质化终局:8295/8675芯片、多屏联动、3D HUD、连续语音......参数堆到天花板,用户感知溢价趋近于零。
真正的技术拐点,是空间智能+家庭大脑+具身智能体 重构座舱底层架构------车不再是孤立的出行工具,而是家庭数字空间的移动延伸节点,实现从「指令响应」到「空间认知」,从「云端依赖」到「端侧自治」,从「被动控制」到「主动服务」的范式跃迁。
本文从整车EE架构、传感器融合、通信协议、端侧AI、数据安全 五大工程维度,用思维导图结构+对比表格+技术框图 拆解空间智能上车的技术底座、落地路径、避坑指南与差异化竞争力,为新能源研发提供可直接落地的工程化方案。
目录
- 研发直击:智能座舱的技术内卷死局与破局点
- 空间智能本质:从「2D交互」到「3D空间认知」的工程升维
- 核心技术底座:家庭大脑+MCP协议+云边端智能体协同
- 整车工程落地:EE架构、感知、通信、决策四大改造
- 人车家全域闭环:不是「远程控灯」,是跨域自治协同
- 研发避坑:4类典型技术陷阱与合规底线
- 工程师经验+方法论+下一步路线
1 研发直击:座舱智能化的内卷死局
1.1 行业现状(研发视角)
- 芯片算力世代迭代,但80%算力闲置,无体验质变
- 语音覆盖率95%,但只能控车、不能连家、无服务闭环
- 车-家停留在云端API对接,延迟高、断网失效
- 大模型上车=聊天机器人,无物理常识、无执行闭环
- 生态割裂,协议孤岛,跨品牌设备无法协同
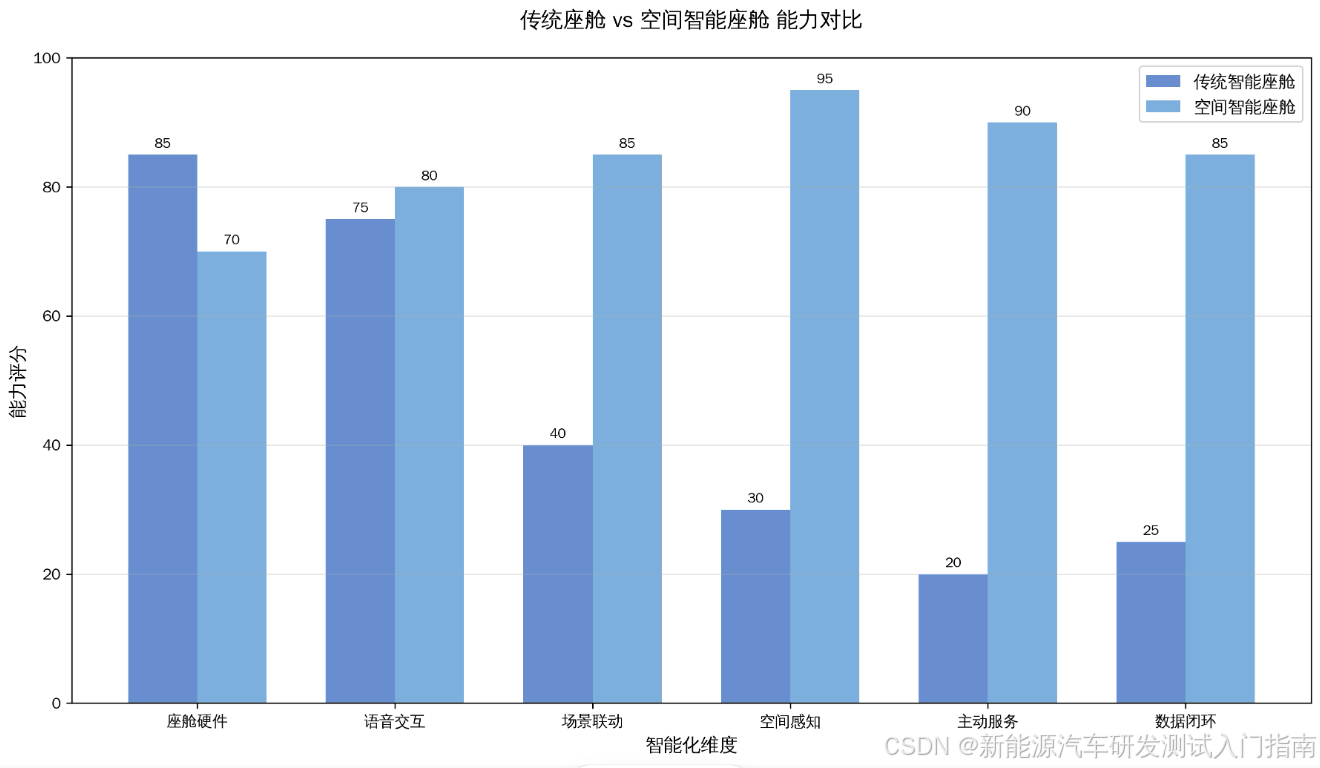
1.2 传统座舱 vs 空间智能座舱
| 维度 | 传统智能座舱 | 空间智能座舱 | 研发差异 |
|---|---|---|---|
| 核心逻辑 | 指令响应、屏控/语音 | 空间认知、主动服务 | 从"控制"到"理解" |
| 感知能力 | 摄像头、麦克风、车态 | 4D时空对齐、通感一体、VLM | 从"采集"到"理解" |
| 通信方式 | MQTT/私有协议、云端中转 | MCP语义协议、P2P直连、端侧自治 | 从"传指令"到"传上下文" |
| 决策系统 | 规则引擎+简单ASR | 大模型快慢融合、PINN物理校核 | 从"匹配"到"推理" |
| 车家关系 | 独立设备、云端联动 | 家庭大脑移动节点、全域协同 | 从"连接"到"一体" |
| 安全机制 | 权限管控 | 数据主权、端侧闭环、可信执行 | 从"管控"到"内生安全" |
2 空间智能:工程级定义与升维
2.1 空间智能(研发功能定义)
让机器具备:
3D空间感知 + 物理规则理解 + 人体意图推理 + 动态执行规划
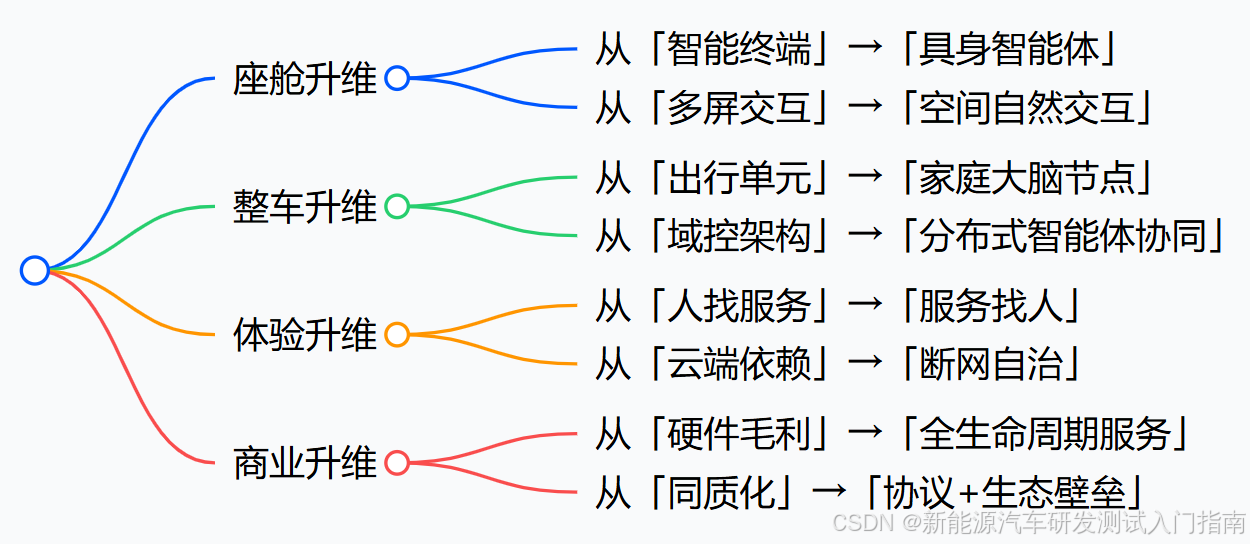
2.2 空间智能上车核心价值(思维导图)
3 核心技术底座
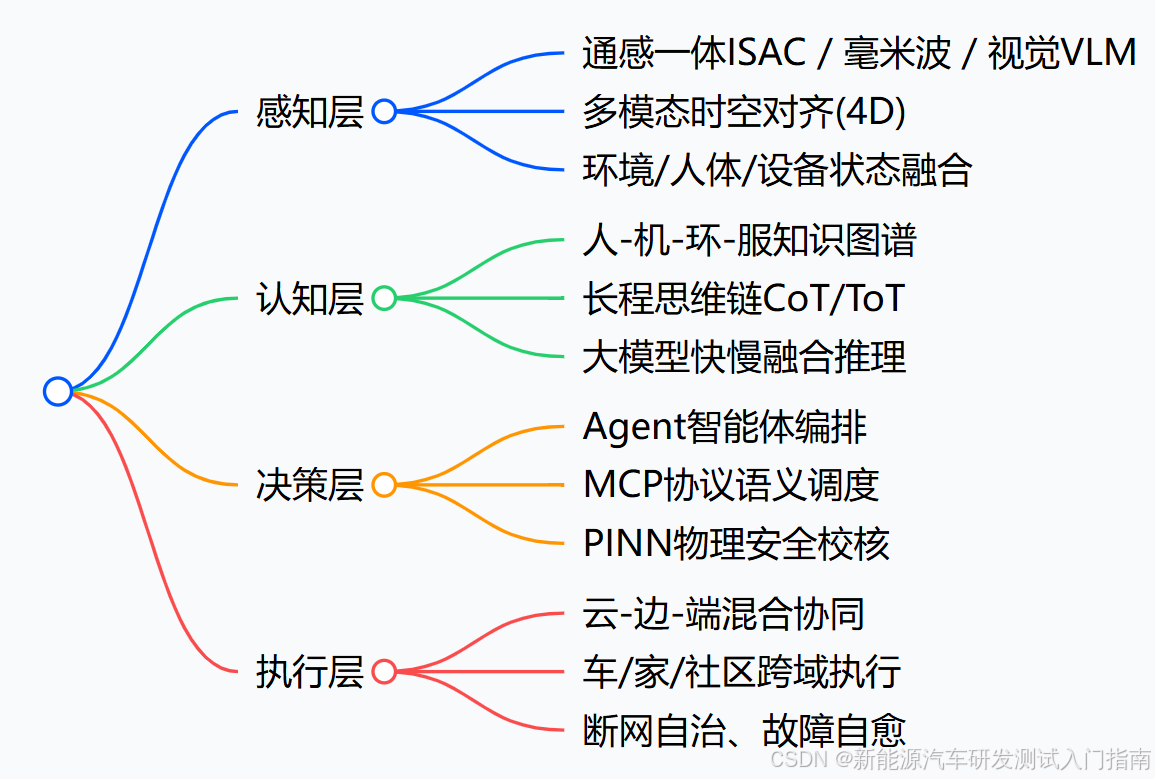
3.1 家庭大脑技术架构
3.2 MCP协议核心价值
| 协议能力 | MCP(模型上下文协议) | 传统MQTT/私有协议 |
|---|---|---|
| 传输内容 | 指令+场景+身份+偏好+状态全上下文 | 仅离散指令 |
| 网络模式 | P2P分布式、本地自治 | 中心化网关、云端依赖 |
| 端到端延迟 | <50ms | 100ms~300ms |
| 断网可用 | 支持全功能本地闭环 | 基本失效 |
| 跨品牌互通 | 标准化语义,即插即用 | 需定制对接,生态封闭 |
| 安全合规 | 端侧加密、数据不出域 | 云端汇聚,隐私风险高 |
3.3 云-边-端智能体协同分工
| 层级 | 部署位置 | 算力规模 | 核心职责 |
|---|---|---|---|
| 云端 | 公有云/私有云 | 千亿参数 | 知识沉淀、策略蒸馏、全局优化 |
| 边缘 | 车机/家庭网关 | 百亿参数 | 实时决策、隐私计算、本地编排 |
| 端侧 | 座椅/空调/灯/家电 | 轻量模型 | 原子执行、状态上报、感知采集 |
4 整车工程落地:四大关键改造
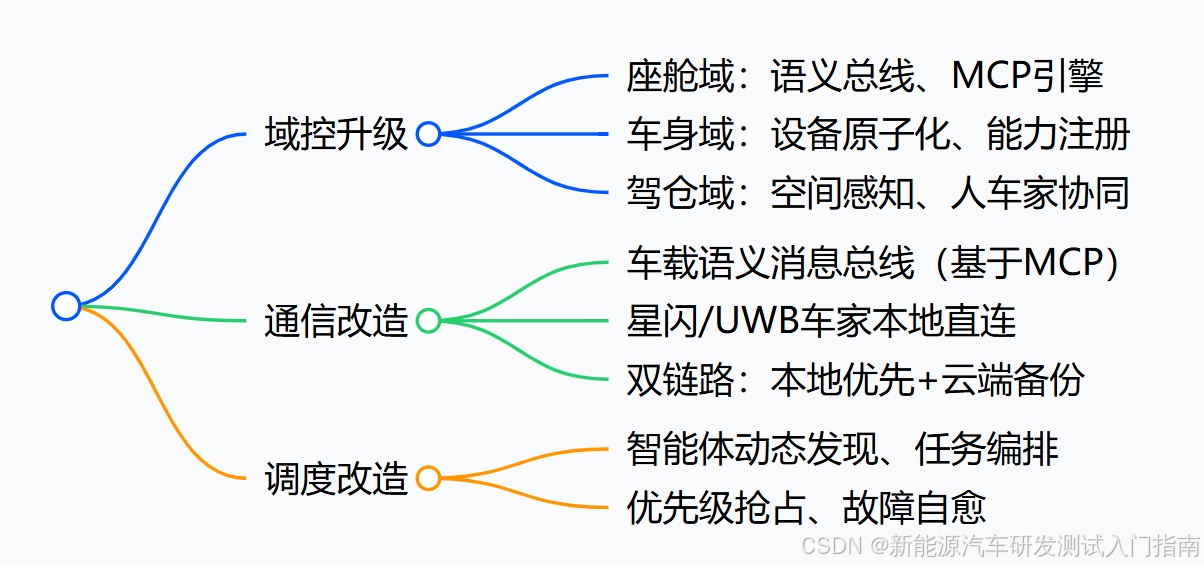
4.1 EE架构改造
4.2 感知系统配置
| 感知类型 | 传感器 | 核心能力 | 上车价值 |
|---|---|---|---|
| 通感一体 | Wi-Fi/星闪芯片 | 人体存在、距离、姿态、微动 | 风避人吹、离座省电、健康监测 |
| 毫米波雷达 | MIMO 发多收 | 人体姿态、呼吸、微动、跌倒 | 车内生命体征、异常行为 |
| 视觉VLM | 环视/DMS/OMS | 空间语义、物体关系、场景理解 | 3D空间映射、意图识别 |
| 多模态融合 | 时空同步单元 | 4D时空对齐、特征融合 | 消除误判、提升确定性 |
4.3 决策系统:快慢融合架构
- 快路径:端侧轻量模型 → <100ms → 高频控制
- 慢路径:边缘大模型 → CoT/ToT → 复杂任务拆解
- 安全兜底 :PINN物理信息神经网络 + 规则引擎 → 执行前必校验
5 人车家全域闭环
5.1 真正的车家互联:不是App控灯,是全域自治
5.2 四大高频场景(研发闭环表)
| 场景 | 触发条件 | 车执行 | 家执行 | 社区执行 | 时延要求 |
|---|---|---|---|---|---|
| 离家模式 | 系安全带/挂D挡 | 关闭车内用电、车辆设防 | 断闲电、安防布防、关灯 | ------ | <300ms |
| 通勤预判 | 导航目的地=家 | 上报ETA | 预开空调/热水/净水 | ------ | <1s |
| 归家入库 | 进入地库/识别车位 | 车辆下电、座椅记忆 | 开门、灯光、电梯预约 | 电梯调度、门禁放行 | <200ms |
| 健康跨域 | 睡眠/体征数据 | 座椅、空调、香氛自适应 | 温湿度、新风、灯光协同 | ------ | 准实时 |
6 研发避坑:4类致命技术陷阱(工程师必看)
6.1 陷阱清单(研发红线)
- 只做云端车家联动
延迟高、断网失效、合规风险高、体验不可控 - 无标准协议直接对接设备
私有协议泛滥,无法规模化,生态不可扩展 - 大模型无约束上车
出现AI幻觉,执行风险高,可能损坏设备、危害安全 - 隐私数据上传云端
行为/视频/健康数据必须端侧闭环、可用不可见
6.2 合规底线
- 数据不出域、计算在端侧
- 脱敏后才可上云
- 跨设备调用必须用户授权
- 车-家数据物理隔离、逻辑互通
7 工程师经验 + 工程方法论
7.1 研发经验
- 智能化的终点,是空间认知、主动服务、自然交互、安全确定。
- 座舱不是装了一套安卓车机,是装下一个可进化的家庭大脑。
- 车与家的竞争,协议比功能重要,自治比云端重要,安全比炫酷重要。
- 好的智能:用户无感、算法有感、执行确定、隐私安全。
7.2 工程落地四步法
- 底座先行:先搭MCP协议+边缘节点,再做场景
- 感知对齐:先做4D时空对齐,再做多模态融合
- 安全兜底:物理规则校核 > 大模型生成
- 场景收敛:先落地归家/离家/通勤/健康四大高频场景
文章关键词:空间智能、车家互联、智能座舱、具身智能、人车家全场景、MCP协议、端侧自治