摘要------在通信感知一体化 (ISAC) 系统中,大多数现有的目标感知方法都假设时频资源是规则分配的。然而,在实际的 ISAC 系统中,由于用户调度的随机性,资源通常是不规则分配的。
本文通过将 CANDECOMP/PARAFAC 分解 (CPD) 框架与张量补全相结合,来解决此类资源不规则场景下的问题。所提出的结构化张量补全与分解 (STCD) 方法,不仅处理来自不规则分配资源区域的回波信号,还对来自未分配区域的信号进行插值,从而增强了目标感知的性能。此外,张量补全重建了导向矩阵的范德蒙 (Vandermonde) 结构。
通过强制执行张量秩一约束,与现有方法相比,STCD 方法利用范德蒙结构为 CPD 建立了更宽松的唯一性条件。此外,我们还给出了 STCD 在角度-距离-速度估计中的克拉美-罗界 (Cramér-Rao bound) 结果,将先前的分析从资源规则场景扩展到了资源不规则场景。仿真结果验证了所提出的 STCD 方法在资源不规则目标感知中的有效性,证明了其相较于传统方法及非结构化对应方法具有提升的性能。
索引词------通信感知一体化,参数估计,不规则资源,张量补全,张量分解。
文章目录
-
- [II. SENSING SIGNAL MODEL](#II. SENSING SIGNAL MODEL)
- [IV. OPTIMIZATION AND PARAMETER ESTIMATION](#IV. OPTIMIZATION AND PARAMETER ESTIMATION)
- [IV. OPTIMIZATION AND PARAMETER ESTIMATION](#IV. OPTIMIZATION AND PARAMETER ESTIMATION)
-
- [C. Structured Initialization for STCD](#C. Structured Initialization for STCD)
- [VI. EXPERIMENTAL RESULTS](#VI. EXPERIMENTAL RESULTS)
II. SENSING SIGNAL MODEL
设 α ℓ \alpha_\ell αℓ 、 θ ℓ \theta_\ell θℓ 、 R ℓ R_\ell Rℓ 和 v ℓ v_\ell vℓ 分别表示第 ℓ \ell ℓ 个周围目标的复增益、角度、距离和速度参数。然后, ( 1 ) (1) (1) 中的感知信道 H n , k ∈ C M r × M t \boldsymbol{H}{n,k} \in \mathbb{C}^{M{\text{r}} \times M_{\text{t}}} Hn,k∈CMr×Mt 被表述为 3
H n , k = ∑ ℓ = 1 L α ℓ e − j 2 π τ ℓ Δ f ( n − 1 ) e j 2 π ( k − 1 ) ν ℓ T sym a r ( θ ℓ ) a t T ( θ ℓ ) , (2) \boldsymbol{H}{n,k} = \sum{\ell=1}^L \alpha_\ell e^{-j 2 \pi \tau_\ell \Delta f (n-1)} e^{j 2 \pi (k-1) \nu_\ell T_{\text{sym}}} \boldsymbol{a}{\text{r}}(\theta\ell) \boldsymbol{a}{\text{t}}^T(\theta\ell), \tag{2} Hn,k=ℓ=1∑Lαℓe−j2πτℓΔf(n−1)ej2π(k−1)νℓTsymar(θℓ)atT(θℓ),(2)
其中 Δ f \Delta f Δf 表示子载波间隔; τ ℓ = 2 R ℓ / c \tau_\ell = 2 R_\ell / c τℓ=2Rℓ/c 表示第 ℓ \ell ℓ 个目标的往返时延,其中 c c c 为光速; ν ℓ = 2 v ℓ / λ \nu_\ell = 2 v_\ell / \lambda νℓ=2vℓ/λ 表示第 ℓ \ell ℓ 个目标的多普勒频移,其中 λ \lambda λ 为波长; T sym = T eff + T cp T_{\text{sym}} = T_{\text{eff}} + T_{\text{cp}} Tsym=Teff+Tcp 表示 OFDM 符号持续时间,其中 T eff T_{\text{eff}} Teff 和 T cp T_{\text{cp}} Tcp 分别为有效 OFDM 符号和循环前缀的持续时间 3 。假设均匀线性阵列(ULA)配置,发射和接收天线导向矢量由下式给出
{ a t ( θ ℓ ) = 1 , e j 2 π λ d t sin ( θ ℓ ) , ⋯ , e j 2 π λ d t ( M t − 1 ) sin ( θ ℓ ) T , a r ( θ ℓ ) = 1 , e j 2 π λ d r sin ( θ ℓ ) , ⋯ , e j 2 π λ d r ( M r − 1 ) sin ( θ ℓ ) T , (3) \begin{cases} \boldsymbol{a}{\text{t}}(\theta\ell) = 1, e\^{j \\frac{2 \\pi}{\\lambda} d_{\\text{t}} \\sin(\\theta_\\ell)}, \\cdots, e\^{j \\frac{2 \\pi}{\\lambda} d_{\\text{t}} (M_{\\text{t}}-1) \\sin(\\theta_\\ell)}^T, \\ \boldsymbol{a}{\text{r}}(\theta\ell) = 1, e\^{j \\frac{2 \\pi}{\\lambda} d_{\\text{r}} \\sin(\\theta_\\ell)}, \\cdots, e\^{j \\frac{2 \\pi}{\\lambda} d_{\\text{r}} (M_{\\text{r}}-1) \\sin(\\theta_\\ell)}^T, \end{cases} \tag{3} {at(θℓ)=1,ejλ2πdtsin(θℓ),⋯,ejλ2πdt(Mt−1)sin(θℓ)T,ar(θℓ)=1,ejλ2πdrsin(θℓ),⋯,ejλ2πdr(Mr−1)sin(θℓ)T,(3)
其中 d t d_{\text{t}} dt 和 d r d_{\text{r}} dr 分别表示发射和接收天线的间距。
在基站(BS)去除发送符号 x n , k x_{n,k} xn,k 后,即
y n , k ∈ C M r = H n , k ⋅ w k + z n , k , (4) \boldsymbol{y}{n,k} \in \mathbb{C}^{M{\text{r}}} = \boldsymbol{H}_{n,k} \cdot \boldsymbol{w}k + \boldsymbol{z}{n,k}, \tag{4} yn,k∈CMr=Hn,k⋅wk+zn,k,(4)
其中 y n , k = y ~ n , k / x n , k \boldsymbol{y}{n,k} = \tilde{\boldsymbol{y}}{n,k} / x_{n,k} yn,k=y~n,k/xn,k 并且 z n , k = z ~ n , k / x n , k \boldsymbol{z}{n,k} = \tilde{\boldsymbol{z}}{n,k} / x_{n,k} zn,k=z~n,k/xn,k ,可以将所有 K K K 个 OFDM 符号和 N N N 个子载波上的回波信号堆叠起来,形成一个 CPD:
Y ∈ C M r × N × K = X + Z , (5) \boldsymbol{\mathcal{Y}} \in \mathbb{C}^{M_{\text{r}} \times N \times K} = \boldsymbol{\mathcal{X}} + \boldsymbol{\mathcal{Z}}, \tag{5} Y∈CMr×N×K=X+Z,(5)
其中
X = ∑ ℓ = 1 L a r ( θ ℓ ) ∘ b ( τ ℓ ) ∘ c ( θ ℓ , ν ℓ , α ℓ ) = \[ A , B , C ] . (6) \boldsymbol{\mathcal{X}} = \sum_{\ell=1}^L \boldsymbol{a}{\text{r}}(\theta\ell) \circ \boldsymbol{b}(\tau_\ell) \circ \boldsymbol{c}(\theta_\ell, \nu_\ell, \alpha_\ell) = \\!\[\\boldsymbol{A}, \\boldsymbol{B}, \\boldsymbol{C}\!]. \tag{6} X=ℓ=1∑Lar(θℓ)∘b(τℓ)∘c(θℓ,νℓ,αℓ)=\[A,B,C].(6)
CPD 中的因子矩阵由下式给出
{ A ∈ C M r × L = a r ( θ 1 ) , ⋯ , a r ( θ L ) , B ∈ C N × L = b ( τ 1 ) , ⋯ , b ( τ L ) , C ∈ C K × L = c ( θ 1 , ν 1 , α 1 ) , ⋯ , c ( θ L , ν L , α L ) , (7) \begin{cases} \boldsymbol{A} \in \mathbb{C}^{M_r \times L} = \\boldsymbol{a}_{\\text{r}}(\\theta_1), \\cdots, \\boldsymbol{a}_{\\text{r}}(\\theta_L), \\ \boldsymbol{B} \in \mathbb{C}^{N \times L} = \\boldsymbol{b}(\\tau_1), \\cdots, \\boldsymbol{b}(\\tau_L), \\ \boldsymbol{C} \in \mathbb{C}^{K \times L} = \\boldsymbol{c}(\\theta_1, \\nu_1, \\alpha_1), \\cdots, \\boldsymbol{c}(\\theta_L, \\nu_L, \\alpha_L), \end{cases} \tag{7} ⎩ ⎨ ⎧A∈CMr×L=ar(θ1),⋯,ar(θL),B∈CN×L=b(τ1),⋯,b(τL),C∈CK×L=c(θ1,ν1,α1),⋯,c(θL,νL,αL),(7)
其中 b ( τ ℓ ) \boldsymbol{b}(\tau_\ell) b(τℓ) 表示时延导向矢量,为
b ( τ ℓ ) = 1 , e − j 2 π τ ℓ Δ f , ... , e − j 2 π τ ℓ Δ f ( N − 1 ) T . (8) \boldsymbol{b}(\tau_\ell) = 1, e\^{-j2\\pi\\tau_\\ell\\Delta f}, \\ldots, e\^{-j2\\pi\\tau_\\ell\\Delta f(N-1)}^T. \tag{8} b(τℓ)=1,e−j2πτℓΔf,...,e−j2πτℓΔf(N−1)T.(8)
多参数耦合矢量 c ( θ ℓ , ν ℓ , α ℓ ) \boldsymbol{c}(\theta_\ell, \nu_\ell, \alpha_\ell) c(θℓ,νℓ,αℓ) 由下式给出
c ( θ ℓ , ν ℓ , α ℓ ) = α ℓ ⋅ ( W T a t ( θ ℓ ) ) ⊛ d ( ν ℓ ) , (9) \boldsymbol{c}(\theta_\ell, \nu_\ell, \alpha_\ell) = \alpha_\ell \cdot (\boldsymbol{W}^T \boldsymbol{a}{\text{t}}(\theta\ell)) \circledast \boldsymbol{d}(\nu_\ell), \tag{9} c(θℓ,νℓ,αℓ)=αℓ⋅(WTat(θℓ))⊛d(νℓ),(9)
其中 W ∈ C M t × K = w 1 , ⋯ , w K \boldsymbol{W} \in \mathbb{C}^{M_t \times K} = \\boldsymbol{w}_1, \\cdots, \\boldsymbol{w}_K W∈CMt×K=w1,⋯,wK 是预编码矩阵,并且 d ( ν ℓ ) \boldsymbol{d}(\nu_\ell) d(νℓ) 表示多普勒频移导向矢量,为
d ( ν ℓ ) = 1 , e j 2 π ν ℓ T sym , ... , e j 2 π ( K − 1 ) ν ℓ T sym T . (10) \boldsymbol{d}(\nu_\ell) = 1, e\^{j2\\pi\\nu_\\ell T_{\\text{sym}}}, \\ldots, e\^{j2\\pi(K-1)\\nu_\\ell T_{\\text{sym}}}^T. \tag{10} d(νℓ)=1,ej2πνℓTsym,...,ej2π(K−1)νℓTsymT.(10)
IV. OPTIMIZATION AND PARAMETER ESTIMATION
定义 1 17 给定一个矩阵 X ∈ C n 1 × n 2 \boldsymbol{X} \in \mathbb{C}^{n_1 \times n_2} X∈Cn1×n2,整数 2 ≤ n 3 ≤ n 1 − 1 2 \le n_3 \le n_1 - 1 2≤n3≤n1−1 和 2 ≤ n 4 ≤ n 1 − 1 2 \le n_4 \le n_1 - 1 2≤n4≤n1−1,且满足 n 1 = n 3 + n 4 − 1 n_1 = n_3 + n_4 - 1 n1=n3+n4−1, X \boldsymbol{X} X 的汉克尔变换(the Hankel transform)记为 F ( X ) ∈ C n 3 × n 4 × n 2 \mathcal{F}(\boldsymbol{X}) \in \mathbb{C}^{n_3 \times n_4 \times n_2} F(X)∈Cn3×n4×n2,定义为 2 ^2 2
F ( X ) i , j , k = X i + j − 1 , k , ∀ i ∈ ⟨ n 3 ⟩ , j ∈ ⟨ n 4 ⟩ , k ∈ ⟨ n 2 ⟩ . ( 14 ) \\mathcal{F}(\\boldsymbol{X}){i,j,k} = \\boldsymbol{X}{i+j-1,k}, \forall i \in \langle n_3 \rangle, j \in \langle n_4 \rangle, k \in \langle n_2 \rangle. \quad (14) F(X)i,j,k=Xi+j−1,k,∀i∈⟨n3⟩,j∈⟨n4⟩,k∈⟨n2⟩.(14)
请注意,在不考虑列缩放的情况下,范德蒙 (Vandermonde) 矩阵的汉克尔变换满足张量正面秩为 1 (frontal-rank-1) 的性质 17。具体而言,张量 X ∈ C n 3 × n 4 × n 2 \boldsymbol{\mathcal{X}} \in \mathbb{C}^{n_3 \times n_4 \times n_2} X∈Cn3×n4×n2 的正面秩(the frontal-rank)记为 rank t ( X ) \text{rank}t(\boldsymbol{\mathcal{X}}) rankt(X),其定义为 rank t ( X ) = max { rank ( X : , : , 1 ) , ⋯ , rank ( X : , : , n 2 ) } . ( 15 ) \text{rank}t(\boldsymbol{\mathcal{X}}) = \max\{\text{rank}(\\boldsymbol{\\mathcal{X}}{:,:,1}), \cdots, \text{rank}(\\boldsymbol{\\mathcal{X}}{:,:,n_2})\}. \quad (15) rankt(X)=max{rank(X:,:,1),⋯,rank(X:,:,n2)}.(15)
式 (12) 中的导向矩阵 A \boldsymbol{A} A 和 B \boldsymbol{B} B 具有范德蒙结构,因此满足 rank t ( F ( A ) ) = rank t ( F ( B ) ) = 1 \text{rank}_t(\mathcal{F}(\boldsymbol{A})) = \text{rank}t(\mathcal{F}(\boldsymbol{B})) = 1 rankt(F(A))=rankt(F(B))=1。相比之下,式 (12) 中的矩阵 C \boldsymbol{C} C 耦合了多个目标参数和预编码矩阵,不具备范德蒙结构。我们通过强制执行 A \boldsymbol{A} A 和 B \boldsymbol{B} B 的秩一 (rank-1) 结构,将 UTCD 修改为 STCD,如下所示: min A , B , C ∥ M ⊛ ( \[ A , B , C ] − Y ) ∥ F 2 ( 16 ) \min{\boldsymbol{A},\boldsymbol{B},\boldsymbol{C}} \|\boldsymbol{\mathcal{M}} \circledast (\\!\[\\boldsymbol{A}, \\boldsymbol{B}, \\boldsymbol{C}\!] - \boldsymbol{\mathcal{Y}})\|_F^2 \quad (16) A,B,Cmin∥M⊛(\[A,B,C]−Y)∥F2(16) s.t. F ( A ) ∈ Γ , F ( B ) ∈ Γ , \text{s.t. } \mathcal{F}(\boldsymbol{A}) \in \Gamma, \mathcal{F}(\boldsymbol{B}) \in \Gamma, s.t. F(A)∈Γ,F(B)∈Γ,其中 Γ : = { X : rank t ( X ) = 1 } \Gamma := \{\boldsymbol{\mathcal{X}} : \text{rank}_t(\boldsymbol{\mathcal{X}}) = 1\} Γ:={X:rankt(X)=1} 表示秩为 1 的张量集合。
2 ^2 2 在本文中,当 n 1 n_1 n1 为奇数时,我们设置 n 3 = n 4 = ( n 1 + 1 ) / 2 n_3 = n_4 = (n_1 + 1)/2 n3=n4=(n1+1)/2 ,否则设置 n 3 = n 4 − 1 = n 1 / 2 n_3 = n_4 - 1 = n_1/2 n3=n4−1=n1/2 。这确保了 F ( X ) \mathcal{F}(\boldsymbol{X}) F(X) 的每个正面切片接近正方形以平衡尺寸。
IV. OPTIMIZATION AND PARAMETER ESTIMATION
尽管式 ( 16 ) (16) (16) 是一个带约束的非凸优化问题,但它可以在交替最小化(AM)框架中被高效求解。引入一个辅助变量 S ∈ C M r × N × K \boldsymbol{\mathcal{S}} \in \mathbb{C}^{M_r \times N \times K} S∈CMr×N×K 来解耦张量补全和张量分解子问题。因此,式 ( 16 ) (16) (16) 被重写为
min S , A , B , C ∥ \[ A , B , C ] − S ∥ F 2 + I ( S − Y ) s.t. F ( A ) ∈ Γ , F ( B ) ∈ Γ , (17) \begin{aligned} \min_{\boldsymbol{\mathcal{S}}, \boldsymbol{A}, \boldsymbol{B}, \boldsymbol{C}} \quad & \| \\!\[\\boldsymbol{A}, \\boldsymbol{B}, \\boldsymbol{C}\!] - \boldsymbol{\mathcal{S}} \|_F^2 + \mathcal{I}(\boldsymbol{\mathcal{S}} - \boldsymbol{\mathcal{Y}}) \\ \text{s.t.} \quad & \mathcal{F}(\boldsymbol{A}) \in \Gamma, \mathcal{F}(\boldsymbol{B}) \in \Gamma, \end{aligned} \tag{17} S,A,B,Cmins.t.∥\[A,B,C]−S∥F2+I(S−Y)F(A)∈Γ,F(B)∈Γ,(17)
其中 I ( ⋅ ) \mathcal{I}(\cdot) I(⋅) 表示关于掩码 M \boldsymbol{\mathcal{M}} M 的指示函数,定义为
I ( X ) = { 0 如果 M ⊛ X = 0 + ∞ , 否则 (18) \mathcal{I}(\boldsymbol{\mathcal{X}}) = \begin{cases} 0 & \text{如果 } \boldsymbol{\mathcal{M}} \circledast \boldsymbol{\mathcal{X}} = \mathbf{0} \\ +\infty, & \text{否则} \end{cases} \tag{18} I(X)={0+∞,如果 M⊛X=0否则(18)
求解式 ( 16 ) (16) (16) 的 AM 框架总结在算法 1 1 1 中。
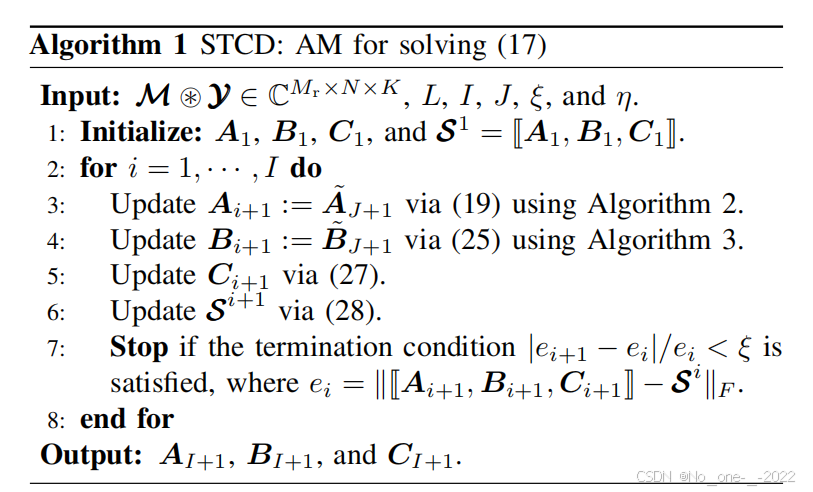
在算法 1 1 1 的第 i i i 次迭代中, A i + 1 \boldsymbol{A}_{i+1} Ai+1 通过一个带约束的最小二乘(LS)问题进行更新:
A i + 1 = arg min A ~ ∥ ( B i ⊙ C i ) A ~ T − S ( 1 ) i ∥ F 2 , s.t. F ( A ~ ) ∈ Γ , (19) \boldsymbol{A}{i+1} = \arg\min{\tilde{\boldsymbol{A}}} \| (\boldsymbol{B}_i \odot \boldsymbol{C}i) \tilde{\boldsymbol{A}}^T - \boldsymbol{S}{(1)}^i \|_F^2, \text{ s.t. } \mathcal{F}(\tilde{\boldsymbol{A}}) \in \Gamma, \tag{19} Ai+1=argA~min∥(Bi⊙Ci)A~T−S(1)i∥F2, s.t. F(A~)∈Γ,(19)
S i \boldsymbol{\mathcal{S}}^i Si:这里的上标 i i i 代表迭代次数,下标 ( 1 ) (1) (1) 代表将该张量沿着模式 1(mode-1)展开为矩阵。
该问题可以使用投影梯度下降(the projected gradient descent,PGD)方法求解 17, 30,如算法 2 2 2 所总结并在下文描述。
由于汉克尔变换是单射的,我们等价地将式 ( 19 ) (19) (19) 中的优化变量转换到其变换域,记为 A ~ : = F ( A ~ ) \tilde{\boldsymbol{\mathcal{A}}} := \mathcal{F}(\tilde{\boldsymbol{A}}) A~:=F(A~) 。反过来,我们有 A ~ = T ⊛ F ∗ ( A ~ ) \tilde{\boldsymbol{A}} = \boldsymbol{T} \circledast \mathcal{F}^*(\tilde{\boldsymbol{\mathcal{A}}}) A~=T⊛F∗(A~) 17,其中 F ∗ \mathcal{F}^* F∗ 是定义 2 2 2 中 F \mathcal{F} F 的伴随算子, T \boldsymbol{T} T 是一个域转换矩阵,表示为
T ∈ R M r × L = 1 ⋯ 1 1 / 2 ⋯ 1 / 2 ⋮ ⋮ ⋮ 1 / ⌈ M r / 2 ⌉ ⋯ 1 / ⌈ M r / 2 ⌉ ⋮ ⋮ ⋮ 1 / 2 ⋯ 1 / 2 1 ⋯ 1 . (20) \boldsymbol{T} \in \mathbb{R}^{M_r \times L} = \begin{bmatrix} 1 & \cdots & 1 \\ 1/2 & \cdots & 1/2 \\ \vdots & \vdots & \vdots \\ 1/\lceil M_r/2 \rceil & \cdots & 1/\lceil M_r/2 \rceil \\ \vdots & \vdots & \vdots \\ 1/2 & \cdots & 1/2 \\ 1 & \cdots & 1 \end{bmatrix}. \tag{20} T∈RMr×L= 11/2⋮1/⌈Mr/2⌉⋮1/21⋯⋯⋮⋯⋮⋯⋯11/2⋮1/⌈Mr/2⌉⋮1/21 .(20)
定义 2 17 张量 X ∈ C n 1 × n 2 × n 3 \boldsymbol{\mathcal{X}} \in \mathbb{C}^{n_1 \times n_2 \times n_3} X∈Cn1×n2×n3 的伴随汉克尔变换,记为 F ∗ ( X ) ∈ C ( n 1 + n 2 − 1 ) × n 3 \mathcal{F}^*(\boldsymbol{\mathcal{X}}) \in \mathbb{C}^{(n_1+n_2-1) \times n_3} F∗(X)∈C(n1+n2−1)×n3 ,定义为
F ∗ ( X ) z , k = ∑ i + j − 1 = z X i , j , k , ∀ 1 ≤ i ≤ n 1 , 1 ≤ j ≤ n 2 , 1 ≤ k ≤ n 3 . (21) \\mathcal{F}\^\*(\\boldsymbol{\\mathcal{X}}){z,k} = \sum{i+j-1=z} \\boldsymbol{\\mathcal{X}}_{i,j,k}, \forall 1 \le i \le n_1, 1 \le j \le n_2, 1 \le k \le n_3. \tag{21} F∗(X)z,k=i+j−1=z∑Xi,j,k,∀1≤i≤n1,1≤j≤n2,1≤k≤n3.(21)
通过这种优化变量转换,我们将式 ( 19 ) (19) (19) 重写为
min A ~ h ( A ~ ) : = ∥ ( B i ⊙ C i ) ( T ⊛ F ∗ ( A ~ ) ) T − S ( 1 ) i ∥ F 2 , s.t. A ~ ∈ Γ , (22) \min_{\tilde{\boldsymbol{\mathcal{A}}}} h(\tilde{\boldsymbol{\mathcal{A}}}) := \| (\boldsymbol{B}_i \odot \boldsymbol{C}i) (\boldsymbol{T} \circledast \mathcal{F}^*(\tilde{\boldsymbol{\mathcal{A}}}))^T - \boldsymbol{S}{(1)}^i \|_F^2, \text{ s.t. } \tilde{\boldsymbol{\mathcal{A}}} \in \Gamma, \tag{22} A~minh(A~):=∥(Bi⊙Ci)(T⊛F∗(A~))T−S(1)i∥F2, s.t. A~∈Γ,(22)
这可以在 J J J 次迭代内使用 PGD 方法求解。PGD 方法的第 j j j 次迭代包括:
{ Q j = A ~ j − η ∇ h ( A ~ j ) , A ~ j + 1 = arg min A ~ ∈ Γ ∥ A ~ − Q j ∥ F 2 = Π Γ ( Q j ) , A ~ j + 1 = T ⊛ F ∗ ( A ~ j + 1 ) , (23) \begin{cases} \boldsymbol{\mathcal{Q}}_j = \tilde{\boldsymbol{\mathcal{A}}}j - \eta \nabla h(\tilde{\boldsymbol{\mathcal{A}}}j), \\ \tilde{\boldsymbol{\mathcal{A}}}{j+1} = \arg\min{\tilde{\boldsymbol{\mathcal{A}}} \in \Gamma} \| \tilde{\boldsymbol{\mathcal{A}}} - \boldsymbol{\mathcal{Q}}j \|F^2 = \Pi\Gamma(\boldsymbol{\mathcal{Q}}j), \\ \tilde{\boldsymbol{A}}{j+1} = \boldsymbol{T} \circledast \mathcal{F}^*(\tilde{\boldsymbol{\mathcal{A}}}{j+1}), \end{cases} \tag{23} ⎩ ⎨ ⎧Qj=A~j−η∇h(A~j),A~j+1=argminA~∈Γ∥A~−Qj∥F2=ΠΓ(Qj),A~j+1=T⊛F∗(A~j+1),(23)
其中 ∇ h ( A ~ j ) = 2 F ( T ⊛ ( A ~ j ( B i ⊙ C i ) T ( B i ⊙ C i ) − ( S ( 1 ) i ) T ( B i ⊙ C i ) ) ) \nabla h(\tilde{\boldsymbol{\mathcal{A}}}_j) = 2 \mathcal{F}(\boldsymbol{T} \circledast (\tilde{\boldsymbol{A}}_j (\boldsymbol{B}_i \odot \boldsymbol{C}_i)^T (\boldsymbol{B}_i \odot \boldsymbol{C}i) - (\boldsymbol{S}{(1)}^i)^T (\boldsymbol{B}_i \odot \boldsymbol{C}_i))) ∇h(A~j)=2F(T⊛(A~j(Bi⊙Ci)T(Bi⊙Ci)−(S(1)i)T(Bi⊙Ci))) 表示函数 h h h 在 A ~ j \tilde{\boldsymbol{\mathcal{A}}}j A~j 处的梯度, η > 0 \eta > 0 η>0 表示步长。 Π Γ \Pi\Gamma ΠΓ 表示到集合 Γ \Gamma Γ 上的正面秩一投影,定义如下。
定义 3 17 设 X : , : , i = U i Σ i V i H \\boldsymbol{\\mathcal{X}}{:,:,i} = \boldsymbol{U}i \boldsymbol{\Sigma}i \boldsymbol{V}i^H X:,:,i=UiΣiViH 表示张量 X ∈ C n 1 × n 2 × n 3 \boldsymbol{\mathcal{X}} \in \mathbb{C}^{n_1 \times n_2 \times n_3} X∈Cn1×n2×n3 第 i i i 个正面切片的紧致奇异值分解(SVD), ∀ i ∈ ⟨ n 3 ⟩ \forall i \in \langle n_3 \rangle ∀i∈⟨n3⟩ 。 X \boldsymbol{\mathcal{X}} X 到集合 Γ \Gamma Γ 上的正面秩一投影,记为 Π Γ ( X ) ∈ C n 1 × n 2 × n 3 \Pi\Gamma(\boldsymbol{\mathcal{X}}) \in \mathbb{C}^{n_1 \times n_2 \times n_3} ΠΓ(X)∈Cn1×n2×n3 ,定义为
Π Γ ( X ) : , : , i = U i : , 1 ⋅ Σ i 1 , 1 ⋅ ( V i : , 1 ) H , ∀ i ∈ ⟨ n 3 ⟩ . (24) \\Pi_\\Gamma(\\boldsymbol{\\mathcal{X}}){:,:,i} = \\boldsymbol{U}_i{:,1} \cdot \\boldsymbol{\\Sigma}_i{1,1} \cdot (\\boldsymbol{V}_i_{:,1})^H, \forall i \in \langle n_3 \rangle. \tag{24} ΠΓ(X):,:,i=Ui:,1⋅Σi1,1⋅(Vi:,1)H,∀i∈⟨n3⟩.(24)
在算法 1 1 1 的第 i i i 次迭代中, B i + 1 \boldsymbol{B}_{i+1} Bi+1 通过一个带约束的 LS 问题进行更新:
B i + 1 = arg min B ~ ∥ E i B ~ T − S ( 2 ) i ∥ F 2 , s.t. F ( B ~ ) ∈ Γ , (25) \boldsymbol{B}{i+1} = \arg\min{\tilde{\boldsymbol{B}}} \| \boldsymbol{E}i \tilde{\boldsymbol{B}}^T - \boldsymbol{S}{(2)}^i \|_F^2, \text{ s.t. } \mathcal{F}(\tilde{\boldsymbol{B}}) \in \Gamma, \tag{25} Bi+1=argB~min∥EiB~T−S(2)i∥F2, s.t. F(B~)∈Γ,(25)
其中为了简便起见使用了 E i = C i ⊙ A i + 1 \boldsymbol{E}_i = \boldsymbol{C}i \odot \boldsymbol{A}{i+1} Ei=Ci⊙Ai+1 。与式 ( 19 ) (19) (19) 类似,式 ( 25 ) (25) (25) 在 J J J 次迭代内使用 PGD 方法求解,如算法 3 3 3 所总结。算法 3 3 3 的第 j j j 次迭代包括:
{ Q ~ j = B ~ j − 2 η ⋅ F ( T ~ ⊛ ( B ~ j E i T E i − ( S ( 2 ) i ) T E i ) ) , B ~ j + 1 = arg min B ~ ∈ Γ ∥ B ~ − Q ~ j ∥ F 2 = Π Γ ( Q ~ j ) , B ~ j + 1 = T ~ ⊛ F ∗ ( B ~ j + 1 ) , (26) \begin{cases} \tilde{\boldsymbol{\mathcal{Q}}}_j = \tilde{\boldsymbol{\mathcal{B}}}_j - 2\eta \cdot \mathcal{F}(\tilde{\boldsymbol{T}} \circledast (\tilde{\boldsymbol{B}}_j \boldsymbol{E}i^T \boldsymbol{E}i - (\boldsymbol{S}{(2)}^i)^T \boldsymbol{E}i)), \\ \tilde{\boldsymbol{\mathcal{B}}}{j+1} = \arg\min{\tilde{\boldsymbol{\mathcal{B}}} \in \Gamma} \| \tilde{\boldsymbol{\mathcal{B}}} - \tilde{\boldsymbol{\mathcal{Q}}}j \|F^2 = \Pi\Gamma(\tilde{\boldsymbol{\mathcal{Q}}}j), \\ \tilde{\boldsymbol{B}}{j+1} = \tilde{\boldsymbol{T}} \circledast \mathcal{F}^*(\tilde{\boldsymbol{\mathcal{B}}}{j+1}), \end{cases} \tag{26} ⎩ ⎨ ⎧Q~j=B~j−2η⋅F(T~⊛(B~jEiTEi−(S(2)i)TEi)),B~j+1=argminB~∈Γ∥B~−Q~j∥F2=ΠΓ(Q~j),B~j+1=T~⊛F∗(B~j+1),(26)
其中域转换矩阵 T ~ ∈ R N × L \tilde{\boldsymbol{T}} \in \mathbb{R}^{N \times L} T~∈RN×L 的定义类似于式 ( 20 ) (20) (20) 中的 T ∈ R M r × L \boldsymbol{T} \in \mathbb{R}^{M_r \times L} T∈RMr×L ,区别仅在于行数不同。在算法 1 1 1 的第 i i i 次迭代中, C i + 1 \boldsymbol{C}_{i+1} Ci+1 通过一个 LS 问题进行更新:
C i + 1 = arg min C ∥ ( A i + 1 ⊙ B i + 1 ) C T − S ( 3 ) i ∥ F 2 = ( S ( 3 ) i ) T ( ( A i + 1 ⊙ B i + 1 ) T ) † . (27) \begin{aligned} \boldsymbol{C}{i+1} &= \arg\min{\boldsymbol{C}} \| (\boldsymbol{A}{i+1} \odot \boldsymbol{B}{i+1}) \boldsymbol{C}^T - \boldsymbol{S}{(3)}^i \|F^2 \\ &= (\boldsymbol{S}{(3)}^i)^T ((\boldsymbol{A}{i+1} \odot \boldsymbol{B}_{i+1})^T)^\dagger. \end{aligned} \tag{27} Ci+1=argCmin∥(Ai+1⊙Bi+1)CT−S(3)i∥F2=(S(3)i)T((Ai+1⊙Bi+1)T)†.(27)
随后, S i + 1 \boldsymbol{\mathcal{S}}^{i+1} Si+1 通过线性投影进行更新:
S i + 1 = arg min S ∥ \[ A i + 1 , B i + 1 , C i + 1 ] − S ∥ F 2 + I ( S − Y ) = ( 1 − M ) ⊛ \[ A i + 1 , B i + 1 , C i + 1 ] + M ⊛ Y , (28) \begin{aligned} \boldsymbol{\mathcal{S}}^{i+1} &= \arg\min_{\boldsymbol{\mathcal{S}}} \| \\!\[\\boldsymbol{A}_{i+1}, \\boldsymbol{B}_{i+1}, \\boldsymbol{C}_{i+1}\!] - \boldsymbol{\mathcal{S}} \|_F^2 + \mathcal{I}(\boldsymbol{\mathcal{S}} - \boldsymbol{\mathcal{Y}}) \\ &= (\mathbf{1} - \boldsymbol{\mathcal{M}}) \circledast \\!\[\\boldsymbol{A}_{i+1}, \\boldsymbol{B}_{i+1}, \\boldsymbol{C}_{i+1}\!] + \boldsymbol{\mathcal{M}} \circledast \boldsymbol{\mathcal{Y}}, \end{aligned} \tag{28} Si+1=argSmin∥\[Ai+1,Bi+1,Ci+1]−S∥F2+I(S−Y)=(1−M)⊛\[Ai+1,Bi+1,Ci+1]+M⊛Y,(28)
其中 1 \mathbf{1} 1 表示一个大小为 M r × N × K M_r \times N \times K Mr×N×K 且所有元素均为 1 1 1 的张量。
此外,可以从 C I + 1 \boldsymbol{C}{I+1} CI+1 的第 ℓ \ell ℓ 列估计第 ℓ \ell ℓ 个目标的速度参数。具体而言,定义一个向量 c ~ ( θ ^ ℓ , z ℓ ) : = ( W T a t ( θ ^ ℓ ) ) ⊛ d ( z ℓ ) \tilde{\boldsymbol{c}}(\hat{\theta}\ell, z_\ell) := (\boldsymbol{W}^T \boldsymbol{a}t(\hat{\theta}\ell)) \circledast \boldsymbol{d}(z_\ell) c~(θ^ℓ,zℓ):=(WTat(θ^ℓ))⊛d(zℓ) ,类似于 ( 9 ) (9) (9) ,其中 d ( z ℓ ) = 1 , z ℓ , ⋯ , z ℓ K − 1 T \boldsymbol{d}(z_\ell) = 1, z_\\ell, \\cdots, z_\\ell\^{K-1}^T d(zℓ)=1,zℓ,⋯,zℓK−1T 是一个具有 z ℓ = e j 2 π ν ℓ T sym z_\ell = e^{j 2 \pi \nu_\ell T_{\text{sym}}} zℓ=ej2πνℓTsym 的导向矢量。参数 z ℓ z_\ell zℓ 可以通过下式估计
z ^ ℓ = arg min z ℓ ( 1 − ∣ c ℓ H ⋅ c ~ ( θ ^ ℓ , z ℓ ) ∣ 2 ∥ c ℓ ∥ 2 2 ⋅ ∥ c ~ ( θ ^ ℓ , z ℓ ) ∥ 2 2 ) = arg min z ℓ ( d H ( z ℓ ) W ~ d ( z ℓ ) ∥ c ℓ ∥ 2 2 ⋅ ∥ c ~ ( θ ^ ℓ , z ℓ ) ∥ 2 2 ) = arg min z ℓ ( ∑ k = − K + 1 K − 1 ( ∑ n 1 − n 2 = k W \~ n 1 , n 2 ) z ℓ k ∥ c ℓ ∥ 2 2 ⋅ ∥ c ~ ( θ ^ ℓ , z ℓ ) ∥ 2 2 ) , (29) \begin{aligned} \hat{z}\ell &= \arg\min{z_\ell} \left( 1 - \frac{|\boldsymbol{c}\ell^H \cdot \tilde{\boldsymbol{c}}(\hat{\theta}\ell, z_\ell)|^2}{\|\boldsymbol{c}\ell\|2^2 \cdot \|\tilde{\boldsymbol{c}}(\hat{\theta}\ell, z\ell)\|2^2} \right) \\ &= \arg\min{z_\ell} \left( \frac{\boldsymbol{d}^H(z_\ell) \widetilde{\boldsymbol{W}} \boldsymbol{d}(z_\ell)}{\|\boldsymbol{c}\ell\|2^2 \cdot \|\tilde{\boldsymbol{c}}(\hat{\theta}\ell, z\ell)\|2^2} \right) \\ &= \arg\min{z_\ell} \left( \frac{\sum_{k=-K+1}^{K-1} \left( \sum_{n_1-n_2=k} \\widetilde{\\boldsymbol{W}}{n_1,n_2} \right) z\ell^k}{\|\boldsymbol{c}\ell\|2^2 \cdot \|\tilde{\boldsymbol{c}}(\hat{\theta}\ell, z\ell)\|_2^2} \right), \end{aligned} \tag{29} z^ℓ=argzℓmin(1−∥cℓ∥22⋅∥c~(θ^ℓ,zℓ)∥22∣cℓH⋅c~(θ^ℓ,zℓ)∣2)=argzℓmin(∥cℓ∥22⋅∥c~(θ^ℓ,zℓ)∥22dH(zℓ)W d(zℓ))=argzℓmin ∥cℓ∥22⋅∥c~(θ^ℓ,zℓ)∥22∑k=−K+1K−1(∑n1−n2=kW n1,n2)zℓk ,(29)
其中为了简便起见使用了 c ℓ = C I + 1 : , ℓ \boldsymbol{c}\ell = \\boldsymbol{C}_{I+1}{:,\ell} cℓ=CI+1:,ℓ 和 W ~ = diag ( ( W T a t ( θ ^ ℓ ) ) ∗ ) ⋅ ( ∥ c ℓ ∥ 2 2 ⋅ I − c ℓ c ℓ H ) ⋅ diag ( W T a t ( θ ^ ℓ ) ) \widetilde{\boldsymbol{W}} = \text{diag}((\boldsymbol{W}^T \boldsymbol{a}t(\hat{\theta}\ell))^*) \cdot (\|\boldsymbol{c}\ell\|2^2 \cdot \mathbf{I} - \boldsymbol{c}\ell \boldsymbol{c}\ell^H) \cdot \text{diag}(\boldsymbol{W}^T \boldsymbol{a}t(\hat{\theta}\ell)) W =diag((WTat(θ^ℓ))∗)⋅(∥cℓ∥22⋅I−cℓcℓH)⋅diag(WTat(θ^ℓ)) 。
分子 = ∥ c ℓ ∥ 2 2 ⋅ ∥ c ~ ∥ 2 2 − ∣ c ℓ H c ~ ∣ 2 = c ~ H ( ∥ c ℓ ∥ 2 2 ⋅ I ) c ~ − ( c ℓ H c ~ ) H ( c ℓ H c ~ ) = c ~ H ( ∥ c ℓ ∥ 2 2 ⋅ I ) c ~ − c ~ H c ℓ c ℓ H c ~ = c ~ H ( ∥ c ℓ ∥ 2 2 ⋅ I − c ℓ c ℓ H ) c ~ = diag ( W T a t ( θ \^ ℓ ) ) d ( z ℓ ) H ( ∥ c ℓ ∥ 2 2 ⋅ I − c ℓ c ℓ H ) diag ( W T a t ( θ \^ ℓ ) ) d ( z ℓ ) = d H ( z ℓ ) ⋅ diag ( ( W T a t ( θ ^ ℓ ) ) ∗ ) ( ∥ c ℓ ∥ 2 2 ⋅ I − c ℓ c ℓ H ) diag ( W T a t ( θ ^ ℓ ) ) ⏟ W ~ ⋅ d ( z ℓ ) = d H ( z ℓ ) W ~ d ( z ℓ ) \begin{aligned} \text{分子} &= \|\boldsymbol{c}\ell\|2^2 \cdot \|\tilde{\boldsymbol{c}}\|2^2 - |\boldsymbol{c}\ell^H \tilde{\boldsymbol{c}}|^2 \\ &= \tilde{\boldsymbol{c}}^H \left( \|\boldsymbol{c}\ell\|2^2 \cdot \mathbf{I} \right) \tilde{\boldsymbol{c}} - (\boldsymbol{c}\ell^H \tilde{\boldsymbol{c}})^H (\boldsymbol{c}\ell^H \tilde{\boldsymbol{c}}) \\ &= \tilde{\boldsymbol{c}}^H \left( \|\boldsymbol{c}\ell\|2^2 \cdot \mathbf{I} \right) \tilde{\boldsymbol{c}} - \tilde{\boldsymbol{c}}^H \boldsymbol{c}\ell \boldsymbol{c}\ell^H \tilde{\boldsymbol{c}} \\ &= \tilde{\boldsymbol{c}}^H \left( \|\boldsymbol{c}\ell\|2^2 \cdot \mathbf{I} - \boldsymbol{c}\ell \boldsymbol{c}\ell^H \right) \tilde{\boldsymbol{c}} \\ &= \left \\text{diag}(\\boldsymbol{W}\^T \\boldsymbol{a}_t(\\hat{\\theta}_\\ell)) \\boldsymbol{d}(z_\\ell) \\right^H \left( \|\boldsymbol{c}\ell\|2^2 \cdot \mathbf{I} - \boldsymbol{c}\ell \boldsymbol{c}\ell^H \right) \left \\text{diag}(\\boldsymbol{W}\^T \\boldsymbol{a}_t(\\hat{\\theta}_\\ell)) \\boldsymbol{d}(z_\\ell) \\right \\ &= \boldsymbol{d}^H(z_\ell) \cdot \underbrace{ \text{diag}((\boldsymbol{W}^T \boldsymbol{a}t(\hat{\theta}\ell))^*) \left( \|\boldsymbol{c}\ell\|2^2 \cdot \mathbf{I} - \boldsymbol{c}\ell \boldsymbol{c}\ell^H \right) \text{diag}(\boldsymbol{W}^T \boldsymbol{a}t(\hat{\theta}\ell)) }{\widetilde{\boldsymbol{W}}} \cdot \boldsymbol{d}(z\ell) \\ &= \boldsymbol{d}^H(z_\ell) \widetilde{\boldsymbol{W}} \boldsymbol{d}(z_\ell) \end{aligned} 分子=∥cℓ∥22⋅∥c~∥22−∣cℓHc~∣2=c~H(∥cℓ∥22⋅I)c~−(cℓHc~)H(cℓHc~)=c~H(∥cℓ∥22⋅I)c~−c~HcℓcℓHc~=c~H(∥cℓ∥22⋅I−cℓcℓH)c~=diag(WTat(θ\^ℓ))d(zℓ)H(∥cℓ∥22⋅I−cℓcℓH)diag(WTat(θ\^ℓ))d(zℓ)=dH(zℓ)⋅W diag((WTat(θ^ℓ))∗)(∥cℓ∥22⋅I−cℓcℓH)diag(WTat(θ^ℓ))⋅d(zℓ)=dH(zℓ)W d(zℓ)
可以使用多项式方法 31 ,类似于 root-MUSIC 方法,以闭式求解 ( 29 ) (29) (29) 。具体而言, ( 29 ) (29) (29) 中的分子形成了一个关于 z ℓ z_\ell zℓ 的多项式。基于该分子,可以获得 ( 30 ) (30) (30) 的 2 ( K − 1 ) 2(K - 1) 2(K−1) 个根:
∑ k = − K + 1 K − 1 ( ∑ n 1 − n 2 = k W \~ n 1 , n 2 ) z ℓ k = 0. (30) \sum_{k=-K+1}^{K-1} \left( \sum_{n_1-n_2=k} \\widetilde{\\boldsymbol{W}}{n_1,n_2} \right) z\ell^k = 0. \tag{30} k=−K+1∑K−1(n1−n2=k∑W n1,n2)zℓk=0.(30)
请注意,如果 γ ℓ ∈ C \gamma_\ell \in \mathbb{C} γℓ∈C 是 ( 30 ) (30) (30) 的这 2 ( K − 1 ) 2(K - 1) 2(K−1) 个根之一,那么 1 / γ ℓ ∗ 1/\gamma_\ell^* 1/γℓ∗ 也是 ( 30 ) (30) (30) 的一个根。在单位圆内的 ( K − 1 ) (K - 1) (K−1) 个根中,我们选择最接近单位圆的一个作为 ( 29 ) (29) (29) 的解。然后,第 ℓ \ell ℓ 个目标的速度参数被估计为 v ^ ℓ = λ ⋅ ∠ z ^ ℓ / ( 4 π T sym ) \hat{v}\ell = \lambda \cdot \angle \hat{z}\ell / (4 \pi T_{\text{sym}}) v^ℓ=λ⋅∠z^ℓ/(4πTsym) 。
C. Structured Initialization for STCD
由于 STCD 是非凸的,其性能取决于 A 1 \boldsymbol{A}_1 A1 、 B 1 \boldsymbol{B}_1 B1 、 C 1 \boldsymbol{C}_1 C1 和 S 1 \boldsymbol{\mathcal{S}}^1 S1 的初始化,如算法 1 1 1 的第 1 1 1 行所示。我们根据式 ( 17 ) (17) (17) 初始化 S 1 = \[ A 1 , B 1 , C 1 ] \boldsymbol{\mathcal{S}}^1 = \\!\[\\boldsymbol{A}_1, \\boldsymbol{B}_1, \\boldsymbol{C}_1\!] S1=\[A1,B1,C1] ,并发现采用结构化初始化的 A 1 \boldsymbol{A}_1 A1 、 B 1 \boldsymbol{B}_1 B1 和 C 1 \boldsymbol{C}_1 C1 的 STCD 通常优于其随机初始化的对应方法。接下来,我们通过划分不规则资源模式的两种情况来考虑 STCD 的结构化初始化。
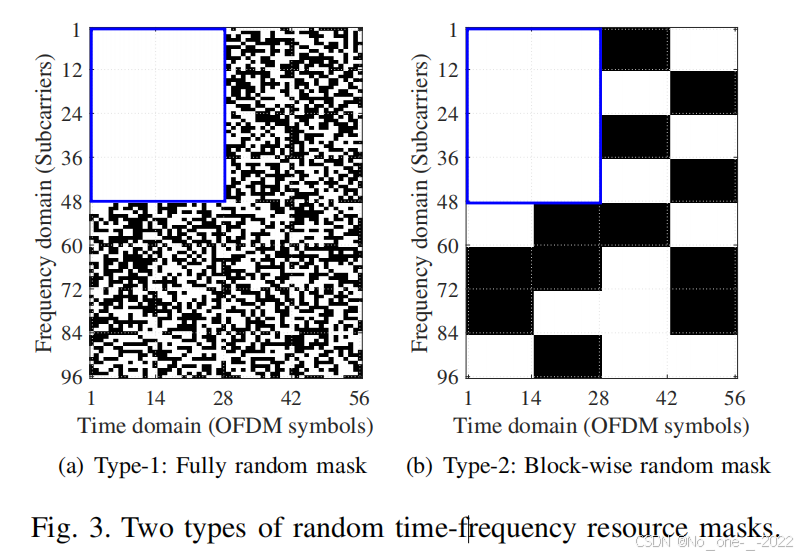
案例 1:考虑一个资源不规则场景,其中至少存在一个规则分配资源的片段,例如在图 3 ( a ) 3(\text{a}) 3(a) 和 ( b ) (\text{b}) (b) 中,前 N a = 48 N_{\text{a}} = 48 Na=48 个子载波和 K a = 28 K_{\text{a}} = 28 Ka=28 个 OFDM 符号作为一个片段连续可用。在这种情况下,我们使用从现有目标感知方法(例如 VCPD)获得的角度、时延和多普勒频移估计值(记为 { θ ^ ℓ , τ ^ ℓ , ν ^ ℓ } ℓ = 1 L \{\hat{\theta}\ell, \hat{\tau}\ell, \hat{\nu}\ell\}{\ell=1}^L {θ^ℓ,τ^ℓ,ν^ℓ}ℓ=1L )来初始化 STCD。该初始化利用了资源规则的片段 Y ~ : = Y : , 1 : N a , 1 : K a \widetilde{\boldsymbol{\mathcal{Y}}} := \\boldsymbol{\\mathcal{Y}}{:, 1:N{\text{a}}, 1:K_{\text{a}}} Y :=Y:,1:Na,1:Ka ,其建模类似于式 ( 5 ) (5) (5) ,即
Y ~ = ∑ ℓ = 1 L α ℓ ( a r ( θ ℓ ) ∘ b ( τ ℓ ) 1 : N a ∘ c ˉ ( θ ℓ , ν ℓ ) 1 : K a ) + Z ~ , (60) \widetilde{\boldsymbol{\mathcal{Y}}} = \sum_{\ell=1}^L \alpha_\ell (\boldsymbol{a}{\text{r}}(\theta\ell) \circ \\boldsymbol{b}(\\tau_\\ell){1:N{\text{a}}} \circ \\bar{\\boldsymbol{c}}(\\theta_\\ell, \\nu_\\ell){1:K{\text{a}}}) + \widetilde{\boldsymbol{\mathcal{Z}}}, \tag{60} Y =ℓ=1∑Lαℓ(ar(θℓ)∘b(τℓ)1:Na∘cˉ(θℓ,νℓ)1:Ka)+Z ,(60)
其中 Z ~ = Z : , 1 : N a , 1 : K a \widetilde{\boldsymbol{\mathcal{Z}}} = \\boldsymbol{\\mathcal{Z}}{:, 1:N{\text{a}}, 1:K_{\text{a}}} Z =Z:,1:Na,1:Ka 表示噪声,为了简便起见使用了 c ˉ ( θ ℓ , ν ℓ ) = ( W T a t ( θ ℓ ) ) ⊛ d ( ν ℓ ) \bar{\boldsymbol{c}}(\theta_\ell, \nu_\ell) = (\boldsymbol{W}^T \boldsymbol{a}{\text{t}}(\theta\ell)) \circledast \boldsymbol{d}(\nu_\ell) cˉ(θℓ,νℓ)=(WTat(θℓ))⊛d(νℓ) 。基于 { θ ^ ℓ , τ ^ ℓ , ν ^ ℓ } ℓ = 1 L \{\hat{\theta}\ell, \hat{\tau}\ell, \hat{\nu}\ell\}{\ell=1}^L {θ^ℓ,τ^ℓ,ν^ℓ}ℓ=1L ,可以使用 LS 方法从 Y ~ \widetilde{\boldsymbol{\mathcal{Y}}} Y 中估计出 { α ^ ℓ } ℓ = 1 L \{\hat{\alpha}\ell\}{\ell=1}^L {α^ℓ}ℓ=1L 。然后我们进行如下初始化
{ A 1 = a r ( θ \^ 1 ) , ⋯ , a r ( θ \^ L ) , B 1 = b ( τ \^ 1 ) , ⋯ , b ( τ \^ L ) , C 1 = α \^ 1 ⋅ c ˉ ( θ \^ 1 , ν \^ 1 ) , ⋯ , α \^ L ⋅ c ˉ ( θ \^ L , ν \^ L ) . (61) \begin{cases} \boldsymbol{A}_1 = \\boldsymbol{a}_{\\text{r}}(\\hat{\\theta}_1), \\cdots, \\boldsymbol{a}_{\\text{r}}(\\hat{\\theta}_L), \\ \boldsymbol{B}_1 = \\boldsymbol{b}(\\hat{\\tau}_1), \\cdots, \\boldsymbol{b}(\\hat{\\tau}_L), \\ \boldsymbol{C}_1 = \\hat{\\alpha}_1 \\cdot \\bar{\\boldsymbol{c}}(\\hat{\\theta}_1, \\hat{\\nu}_1), \\cdots, \\hat{\\alpha}_L \\cdot \\bar{\\boldsymbol{c}}(\\hat{\\theta}_L, \\hat{\\nu}_L). \end{cases} \tag{61} ⎩ ⎨ ⎧A1=ar(θ\^1),⋯,ar(θ\^L),B1=b(τ\^1),⋯,b(τ\^L),C1=α\^1⋅cˉ(θ\^1,ν\^1),⋯,α\^L⋅cˉ(θ\^L,ν\^L).(61)
案例 2:在没有规则资源片段的纯资源不规则场景中, A 1 \boldsymbol{A}_1 A1 、 B 1 \boldsymbol{B}_1 B1 和 C 1 \boldsymbol{C}_1 C1 通过使用观测值 M ⊛ Y \boldsymbol{\mathcal{M}} \circledast \boldsymbol{\mathcal{Y}} M⊛Y 的初步目标感知阶段进行初始化。该观测值的所有可用行沿着其第二个维度被重新排列成一个矩阵 Y ∈ C M r × ∣ Ω ∣ \boldsymbol{Y} \in \mathbb{C}^{M_r \times |\Omega|} Y∈CMr×∣Ω∣ ,其中 ∣ Ω ∣ |\Omega| ∣Ω∣ 是可用时频资源的数量。设 Y = U Σ V H \boldsymbol{Y} = \boldsymbol{U} \boldsymbol{\Sigma} \boldsymbol{V}^H Y=UΣVH 为 Y \boldsymbol{Y} Y 的紧致 SVD,其中假设在 L ≤ min { M r , ∣ Ω ∣ } L \le \min\{M_r, |\Omega|\} L≤min{Mr,∣Ω∣} 的情况下 U ∈ C M r × L \boldsymbol{U} \in \mathbb{C}^{M_r \times L} U∈CMr×L 且 V ∈ C ∣ Ω ∣ × L \boldsymbol{V} \in \mathbb{C}^{|\Omega| \times L} V∈C∣Ω∣×L 。当 Y \boldsymbol{Y} Y 无噪声时,存在一个非奇异矩阵 S ∈ C L × L \boldsymbol{S} \in \mathbb{C}^{L \times L} S∈CL×L 使得 U S = A \boldsymbol{U}\boldsymbol{S} = \boldsymbol{A} US=A 22,其中 A \boldsymbol{A} A 在式 ( 7 ) (7) (7) 中定义。此外, A \boldsymbol{A} A 的范德蒙结构意味着 22
U ‾ S = A ‾ = A ‾ D = U ‾ S D , (62) \overline{\boldsymbol{U}} \boldsymbol{S} = \overline{\boldsymbol{A}} = \underline{\boldsymbol{A}} \boldsymbol{D} = \underline{\boldsymbol{U}} \boldsymbol{S} \boldsymbol{D}, \tag{62} US=A=AD=USD,(62)
其中 D = diag ( d 1 , ... , d L ) \boldsymbol{D} = \text{diag}(d_1, \ldots, d_L) D=diag(d1,...,dL) 且 d l = e j 2 π λ d r sin ( θ ℓ ) d_l = e^{j\frac{2\pi}{\lambda} d_r \sin(\theta_\ell)} dl=ejλ2πdrsin(θℓ) 。矩阵 U ‾ ∈ C ( M r − 1 ) × L \overline{\boldsymbol{U}} \in \mathbb{C}^{(M_r-1) \times L} U∈C(Mr−1)×L 和 U ‾ ∈ C ( M r − 1 ) × L \underline{\boldsymbol{U}} \in \mathbb{C}^{(M_r-1) \times L} U∈C(Mr−1)×L 分别是通过移除 U \boldsymbol{U} U 的第一行和最后一行获得的。矩阵 A ‾ \overline{\boldsymbol{A}} A 和 A ‾ \underline{\boldsymbol{A}} A 以类似的方式定义。因此,我们通过 U ‾ † U ‾ = S D S − 1 \underline{\boldsymbol{U}}^\dagger \overline{\boldsymbol{U}} = \boldsymbol{S} \boldsymbol{D} \boldsymbol{S}^{-1} U†U=SDS−1 的特征值分解(EVD)从矩阵 D \boldsymbol{D} D 中估计角度参数 { θ ^ ℓ } ℓ = 1 L \{\hat{\theta}\ell\}{\ell=1}^L {θ^ℓ}ℓ=1L ,然后按照式 ( 61 ) (61) (61) 初始化 A 1 \boldsymbol{A}_1 A1 。
为了通过式 ( 61 ) (61) (61) 初始化 B 1 \boldsymbol{B}1 B1 ,我们通过分别处理张量 M ⊛ Y \boldsymbol{\mathcal{M}} \circledast \boldsymbol{\mathcal{Y}} M⊛Y 的不同正面切片来估计 { τ ^ ℓ } ℓ = 1 L \{\hat{\tau}\ell\}{\ell=1}^L {τ^ℓ}ℓ=1L 。设 S k S_k Sk 表示矩阵 M : , : , k ∈ C M r × N \\boldsymbol{\\mathcal{M}}{:,:,k} \in \mathbb{C}^{M_r \times N} M:,:,k∈CMr×N 中非零列的索引集,对应于可用的子载波。例如,如果 M : , 2 , k ≠ 0 \\boldsymbol{\\mathcal{M}}{:,2,k} \neq \mathbf{0} M:,2,k=0 且 M : , 4 , k ≠ 0 \\boldsymbol{\\mathcal{M}}{:,4,k} \neq \mathbf{0} M:,4,k=0 ,那么 S k = { 2 , 4 } S_k = \{2, 4\} Sk={2,4} 。根据式 ( 6 ) (6) (6) 和 ( 7 ) (7) (7) ,我们有
X : , S k , k = A ⋅ diag ( C k , : ) ⋅ ( B S k , : ) T , ∀ k ∈ ⟨ K ⟩ . (63) \\boldsymbol{\\mathcal{X}}{:,S_k,k} = \boldsymbol{A} \cdot \text{diag}(\\boldsymbol{C}{k,:}) \cdot (\\boldsymbol{B}_{S_k,:})^T, \forall k \in \langle K \rangle. \tag{63} X:,Sk,k=A⋅diag(Ck,:)⋅(BSk,:)T,∀k∈⟨K⟩.(63)
基于式 ( 63 ) (63) (63) ,在存在列缩放模糊性的情况下,可以使用 A 1 \boldsymbol{A}1 A1 从 M ⊛ Y \boldsymbol{\mathcal{M}} \circledast \boldsymbol{\mathcal{Y}} M⊛Y 中估计出矩阵 B S k , : ∈ C ∣ S k ∣ × L \\boldsymbol{B}{S_k,:} \in \mathbb{C}^{|S_k| \times L} BSk,:∈C∣Sk∣×L 作为
( B \^ S k , : ) T = A 1 † ⋅ M ⊛ Y : , S k , k . (64) (\\hat{\\boldsymbol{B}}_{S_k,:})^T = \boldsymbol{A}1^\dagger \cdot \\boldsymbol{\\mathcal{M}} \\circledast \\boldsymbol{\\mathcal{Y}}{:,S_k,k}. \tag{64} (B\^Sk,:)T=A1†⋅M⊛Y:,Sk,k.(64)
然后,可以通过基于相关的方案 19 从矩阵 B \^ S k , : \\hat{\\boldsymbol{B}}{S_k,:} B\^Sk,: 中估计出 { τ ^ ℓ } ℓ = 1 L \{\hat{\tau}\ell\}_{\ell=1}^L {τ^ℓ}ℓ=1L :
τ ^ ℓ = arg max τ ℓ ( ∑ k = 1 K ∣ ( b ( τ ℓ ) S k ) H ⋅ B \^ S k , ℓ ∣ 2 ∥ b ( τ ℓ ) S k ∥ 2 2 ⋅ ∥ B \^ S k , ℓ ∥ 2 2 ) , ∀ ℓ ∈ ⟨ L ⟩ , (65) \hat{\tau}\ell = \arg\max{\tau_\ell} \left( \sum_{k=1}^K \frac{|(\\boldsymbol{b}(\\tau_\\ell){S_k})^H \cdot \\hat{\\boldsymbol{B}}{S_k,\ell}|^2}{\|\\boldsymbol{b}(\\tau_\\ell)_{S_k}\|2^2 \cdot \|\\hat{\\boldsymbol{B}}{S_k,\ell}\|_2^2} \right), \forall \ell \in \langle L \rangle, \tag{65} τ^ℓ=argτℓmax(k=1∑K∥b(τℓ)Sk∥22⋅∥B\^Sk,ℓ∥22∣(b(τℓ)Sk)H⋅B\^Sk,ℓ∣2),∀ℓ∈⟨L⟩,(65)
其中 b ( τ ℓ ) \boldsymbol{b}(\tau_\ell) b(τℓ) 在式 ( 8 ) (8) (8) 中定义。
已知 CP 分解模型为 X = \[ A , B , C ] \boldsymbol{\mathcal{X}} = \\!\[\\boldsymbol{A}, \\boldsymbol{B}, \\boldsymbol{C}\!] X=\[A,B,C],以下是推导其第 k k k 个正面切片代数结构的严谨过程:
1. 模 3 展开 (Mode-3 Unfolding)
将张量 X \boldsymbol{\mathcal{X}} X 沿第三维度(时间维度 K K K)展开为矩阵 X ( 3 ) \boldsymbol{X}{(3)} X(3)。根据 CP 分解的标准性质,该展开矩阵可表示为因子矩阵的 Khatri-Rao 乘积( ⊙ \odot ⊙)形式:
X ( 3 ) = C ( B ⊙ A ) T \boldsymbol{X}{(3)} = \boldsymbol{C} (\boldsymbol{B} \odot \boldsymbol{A})^T X(3)=C(B⊙A)T2. 提取第 k k k 行向量
张量第 k k k 个二维正面切片 X : , : , k \\boldsymbol{\\mathcal{X}}{:,:,k} X:,:,k 按行拉平后的向量,恰好对应于展开矩阵 X ( 3 ) \boldsymbol{X}{(3)} X(3) 的第 k k k 行。提取该行得到:
X ( 3 ) k , : = C k , : ( B ⊙ A ) T \\boldsymbol{X}_{(3)}{k,:} = \\boldsymbol{C}{k,:} (\boldsymbol{B} \odot \boldsymbol{A})^T X(3)k,:=Ck,:(B⊙A)T3. 引入 Khatri-Rao 乘积恒等式
在张量代数中,关于行向量化操作( rvec \text{rvec} rvec)与 Khatri-Rao 乘积存在一个核心恒等式。对于任意矩阵 A , B \boldsymbol{A}, \boldsymbol{B} A,B 和对角矩阵 diag ( d ) \text{diag}(\boldsymbol{d}) diag(d) ( d \boldsymbol{d} d 为列向量),恒有:
rvec ( A ⋅ diag ( d ) ⋅ B T ) = d T ( B ⊙ A ) T \text{rvec}(\boldsymbol{A} \cdot \text{diag}(\boldsymbol{d}) \cdot \boldsymbol{B}^T) = \boldsymbol{d}^T (\boldsymbol{B} \odot \boldsymbol{A})^T rvec(A⋅diag(d)⋅BT)=dT(B⊙A)T4. 向量折叠还原矩阵
观察第 2 步的等式右侧 C k , : ( B ⊙ A ) T \\boldsymbol{C}{k,:} (\boldsymbol{B} \odot \boldsymbol{A})^T Ck,:(B⊙A)T,它完美匹配了恒等式的右侧结构。在这里,行向量 C k , : \\boldsymbol{C}{k,:} Ck,: 对应于恒等式中的 d T \boldsymbol{d}^T dT。
因此,根据恒等式,将行向量 X ( 3 ) k , : \\boldsymbol{X}_{(3)}{k,:} X(3)k,: 重新"折叠"还原为 M r × N M_r \times N Mr×N 的二维矩阵,对角阵便自然地插入到了 A \boldsymbol{A} A 和 B T \boldsymbol{B}^T BT 之间,直接得出:
X : , : , k = A ⋅ diag ( C k , : ) ⋅ B T \\boldsymbol{\\mathcal{X}}{:,:,k} = \boldsymbol{A} \cdot \text{diag}(\\boldsymbol{C}_{k,:}) \cdot \boldsymbol{B}^T X:,:,k=A⋅diag(Ck,:)⋅BT
VI. EXPERIMENTAL RESULTS
我们评估了 STCD 在目标感知方面的性能,并将其与 MUSIC、UTCD 以及两种基于 CPD 的方法:VCPD 3 和 IMDF 12, 13 进行了对比。仿真参数总结在表 II 中。
考虑到 VCPD 和 IMDF 仅适用于资源规则的场景,我们在图 3 中测试了两种类型的随机资源模式,其中图 3 中的白色和黑色网格分别代表可用和不可用的资源单元。
在图 3 中,一定比例(记为 p 1 ∈ 0 , 1 p_1 \in 0,1 p1∈0,1)的时频资源被配置为持续可用,如蓝色区域所示。例如, p 1 = 0.5 p_1 = 0.5 p1=0.5 意味着在图 3 中,前 48 个子载波和 28 个 OFDM 符号是可用的。另一方面,在图 3 中,剩余的时频资源被随机配置为以 p 2 p_2 p2 或 ( 1 − p 2 ) (1 - p_2) (1−p2) 的概率可用或不可用。全随机模式显示在图 3(a) 中。块随机资源模式显示在图 3(b) 中,其中一个资源块由 N b = 12 N_b = 12 Nb=12 个连续子载波和 K b = 14 K_b = 14 Kb=14 个连续 OFDM 符号组成。用户设备(UE)的数量设定为 4。分配给 4 个 UE 的可用时频资源是互不相交的,满足 Ω = Ω 1 ∪ Ω 2 ∪ Ω 3 ∪ Ω 4 \Omega = \Omega_1 \cup \Omega_2 \cup \Omega_3 \cup \Omega_4 Ω=Ω1∪Ω2∪Ω3∪Ω4 且 Ω 1 ∩ Ω 2 ∩ Ω 3 ∩ Ω 4 = ∅ \Omega_1 \cap \Omega_2 \cap \Omega_3 \cap \Omega_4 = \varnothing Ω1∩Ω2∩Ω3∩Ω4=∅。这里, Ω 1 ⊂ ⟨ 48 ⟩ × ⟨ 28 ⟩ , Ω 2 ⊂ ⟨ 48 ⟩ × { 29 , ⋯ , 56 } , Ω 3 ⊂ { 49 , ⋯ , 96 } × ⟨ 28 ⟩ \Omega_1 \subset \langle 48 \rangle \times \langle 28 \rangle, \Omega_2 \subset \langle 48 \rangle \times \{29, \cdots, 56\}, \Omega_3 \subset \{49, \cdots, 96\} \times \langle 28 \rangle Ω1⊂⟨48⟩×⟨28⟩,Ω2⊂⟨48⟩×{29,⋯,56},Ω3⊂{49,⋯,96}×⟨28⟩ 和 Ω 4 ⊂ { 49 , ⋯ , 96 } × { 29 , ⋯ , 56 } \Omega_4 \subset \{49, \cdots, 96\} \times \{29, \cdots, 56\} Ω4⊂{49,⋯,96}×{29,⋯,56} 分别表示分配给 UE-1、UE-2、UE-3 和 UE-4 的可用资源集合。