VisionPro 仪表指针智能识别 完整笔记(核心公式 + 脚本解析)
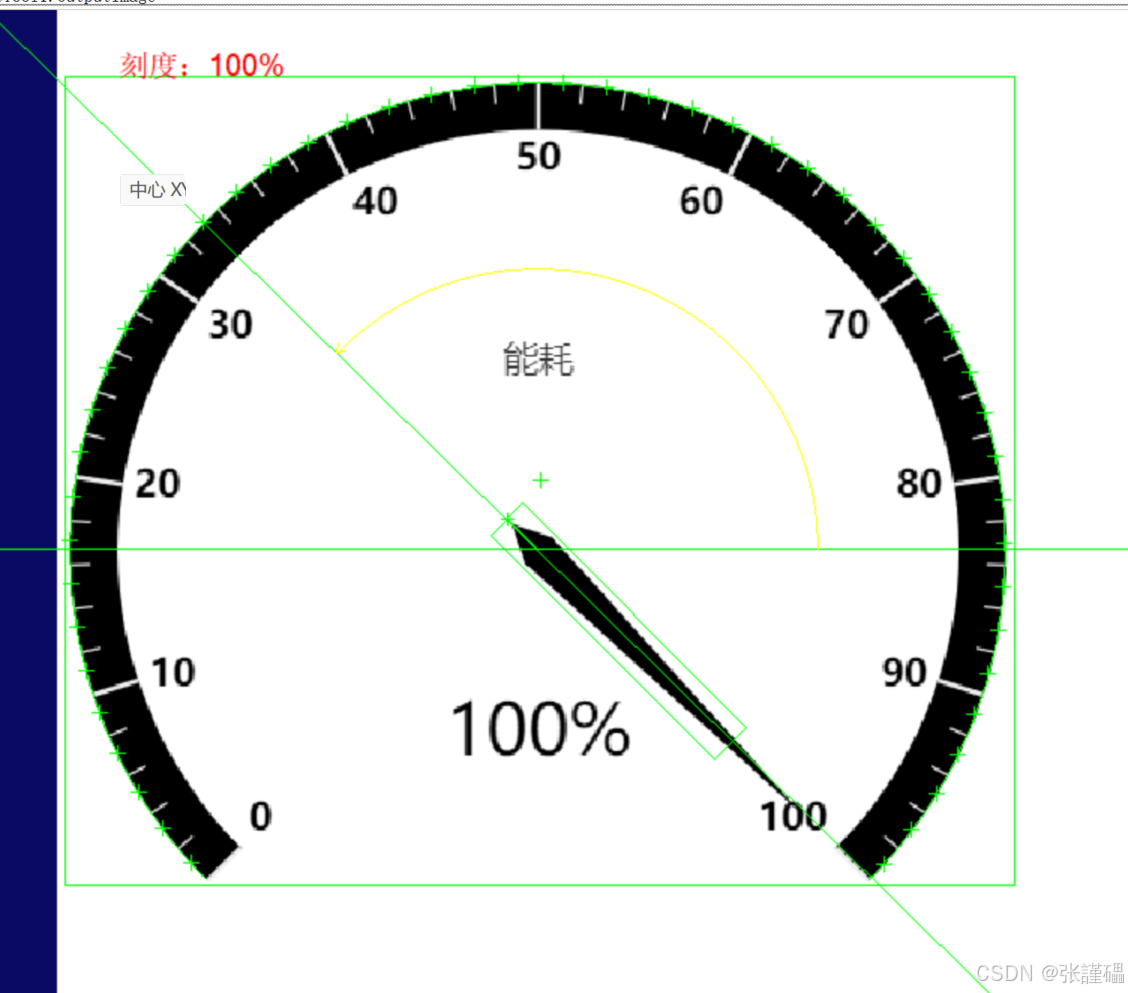
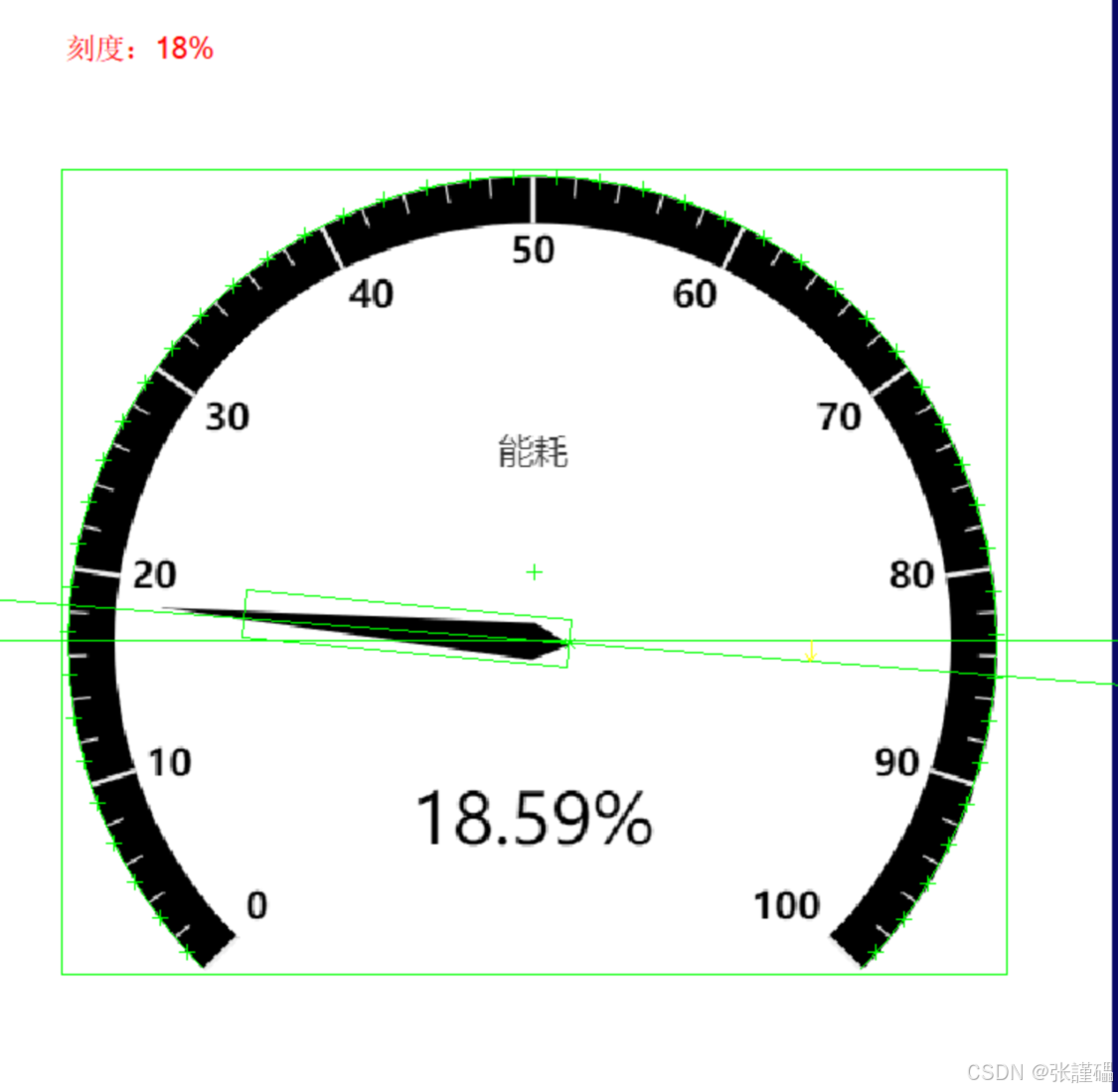
这是指针式仪表自动读数 的核心算法:**通过指针角度 → 换算成实际测量值(0~100)**工业常用:压力表、电流表、电压表、仪表盘、指针表自动识别。
一、核心功能(一句话)
输入:指针角度(弧度) 输出:仪表实际刻度值(0~100) 公式:角度线性插值换算(标准仪表换算公式)
二、完整脚本(带逐行注释)
c#
// 仪表刻度换算公式:实际值 = 最小值 + (最大值-最小值) * (当前角度-最小角度)/(最大角度-最小角度)
double Angle = CogMisc.RadToDeg(Inputs.Angle); // 弧度 → 转角度(VisionPro专用)
double Vmin = 0; // 仪表刻度最小值
double Vmax = 100; // 仪表刻度最大值
double Angle_min = -45; // 指针最小角度(对应0)
double Angle_max = 225; // 指针最大角度(对应100)
// 角度修正:解决负角度超限问题(-180~-135 → 转为正角度)
if(Angle > -180 && Angle < -135)
{
Angle = 180 + (180 - Math.Abs(Angle));
}
// 最终输出:角度 → 换算成仪表实际数值
Outputs.Output = Vmin + (Vmax - Vmin) * (Angle - Angle_min) / (Angle_max - Angle_min);三、逐行超详细解析
1. 角度单位转换(必须)
c#
double Angle = CogMisc.RadToDeg(Inputs.Angle);- VisionPro 工具输出的角度是弧度(Rad)
- 必须用
CogMisc.RadToDeg转成角度(Deg) 才能计算
2. 仪表刻度参数
c#
double Vmin = 0; // 仪表最小刻度:0
double Vmax = 100; // 仪表最大刻度:100
double Angle_min = -45; // 指针在 0 位时的角度
double Angle_max = 225; // 指针在 100 位时的角度这 4 个值根据你的仪表实际调整!
3. 角度修正(关键!解决 360° 转圈问题)
c#
if(Angle > -180 && Angle < -135)
{
Angle = 180 + (180 - Math.Abs(Angle));
}- 指针转过 180° 后,角度会变成负数
- 这段代码把 -180~-135 修正为正角度,保证计算正确
4. 核心换算公式
c#
Outputs.Output = Vmin + (Vmax - Vmin) * (Angle - Angle_min) / (Angle_max - Angle_min);这就是 线性插值公式:
plaintext
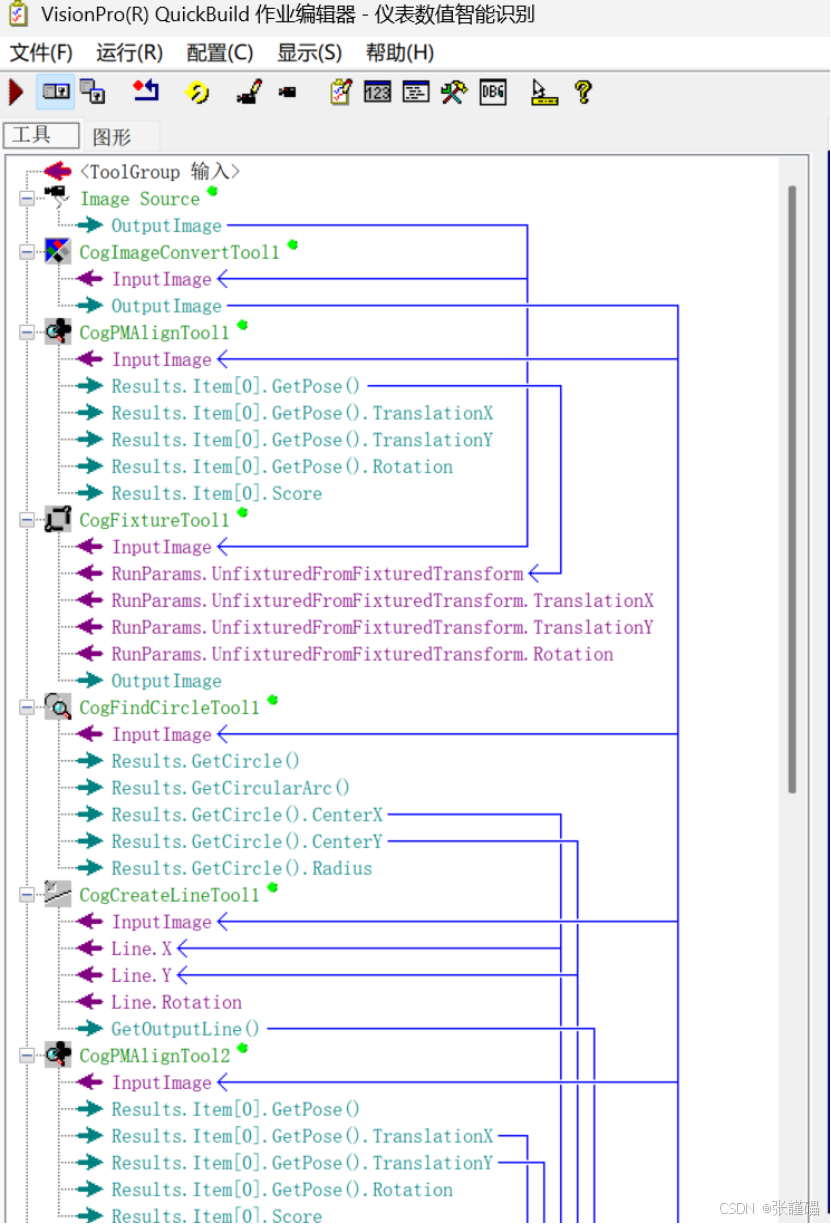
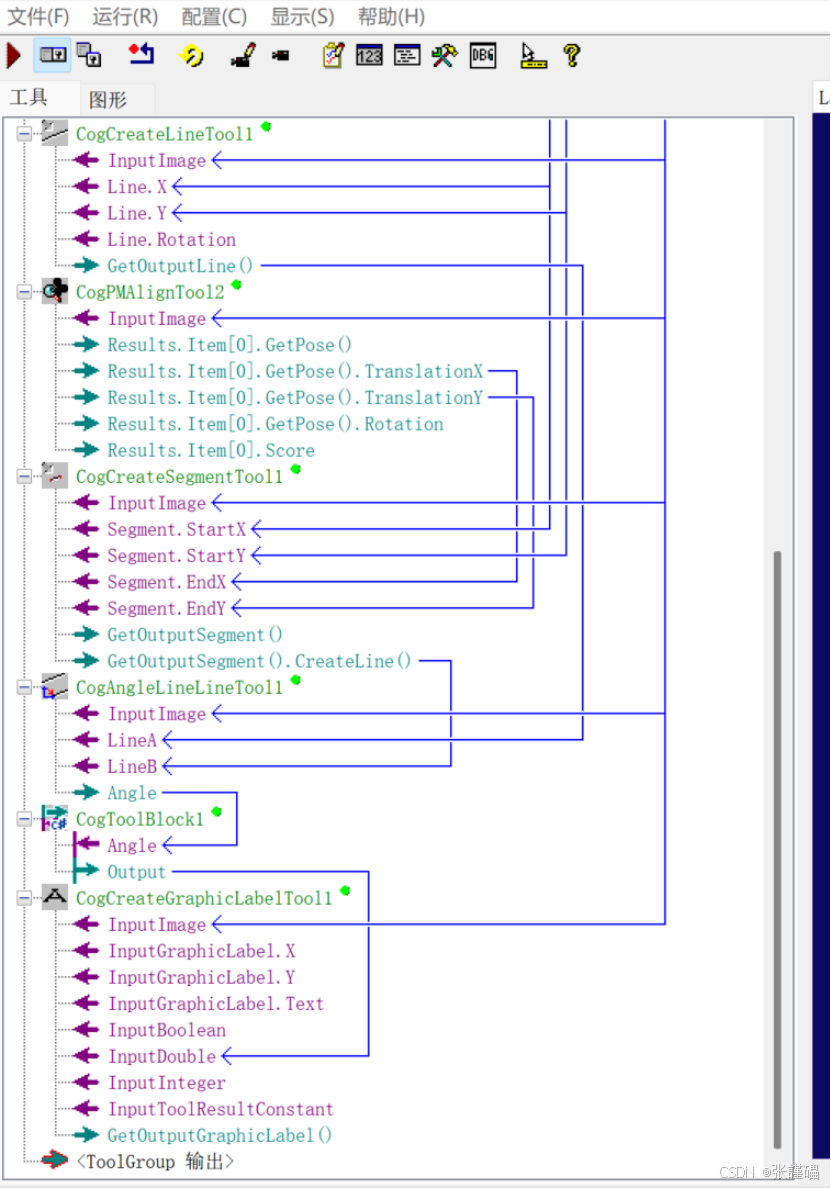
实际值 = 最小值 + (最大值 - 最小值) × (当前角度 - 最小角度) / (最大角度 - 最小角度)四、配套使用的 VisionPro 工具
这个脚本必须配合以下工具使用:
- CogPMAlignTool (模板匹配)
- 定位仪表中心、表盘位置
- CogCaliperTool / CogAngleTool
- 找指针边缘,计算指针角度
- 脚本(你提供的这段)
- 角度 → 实际数值
五、工作流程(标准仪表识别流程)
plaintext
1. 图像采集
2. 模板匹配定位仪表
3. 卡尺/角度工具找指针
4. 获取指针角度(弧度)
5. 脚本:弧度转角度
6. 脚本:角度修正
7. 脚本:线性插值 → 输出实际读数
8. 输出结果:0~100六、你只需要改这 4 个参数(调试重点)
c#
double Vmin = 0; // 仪表最小值
double Vmax = 100; // 仪表最大值
double Angle_min = -45; // 指针在最小值时的角度
double Angle_max = 225; // 指针在最大值时的角度七、总结(最精简)
这是指针仪表自动读数的标准算法:
- 弧度转角度
- 角度修正(防负数错误)
- 线性插值公式 = 角度转实际值
工业 99% 指针压力表、电流表、电压表都用这套脚本!
需要我帮你:✅ 生成完整的 VisionPro 仪表识别工具链 ✅ 做成可直接导入运行的工程 ✅ 输出指针角度、原始值、最终值 ✅ 加 上下限报警(OK/NG)
工具:
脚本:
//V = Vmin +( Vmax - Vmin) * (Angle - Angle_min) / (Angle_max - Angle_min)
double Angle = CogMisc.RadToDeg(Inputs.Angle);
double Vmin = 0;
double Vmax = 100;
double Angle_min = -45;
double Angle_max = 225;
if(Angle > -180 && Angle < -135)
{
Angle = 180 + (180 - Math.Abs(Angle));
}
Outputs.Output = Vmin + ( Vmax - Vmin ) * (Angle - Angle_min) / (Angle_max - Angle_min);
完整代码:
cs
#region namespace imports
using System;
using System.Collections;
using System.Drawing;
using System.IO;
using System.Windows.Forms;
using Cognex.VisionPro;
using Cognex.VisionPro.ToolBlock;
using Cognex.VisionPro3D;
#endregion
public class CogToolBlockSimpleScript : CogToolBlockAdvancedScript
{
/// <summary>
/// Called when the parent tool is run.
/// Add code here to customize or replace the normal run behavior.
/// </summary>
/// <param name="message">Sets the Message in the tool's RunStatus.</param>
/// <param name="result">Sets the Result in the tool's RunStatus</param>
/// <returns>True if the tool should run normally,
/// False if GroupRun customizes run behavior</returns>
public override bool GroupRun(ref string message, ref CogToolResultConstants result)
{
// To let the execution stop in this script when a debugger is attached, uncomment the following lines.
// #if DEBUG
// if (System.Diagnostics.Debugger.IsAttached) System.Diagnostics.Debugger.Break();
// #endif
//V = Vmin +( Vmax - Vmin) * (Angle - Angle_min) / (Angle_max - Angle_min)
double Angle = CogMisc.RadToDeg(Inputs.Angle);
double Vmin = 0;
double Vmax = 100;
double Angle_min = -45;
double Angle_max = 225;
if(Angle > -180 && Angle < -135)
{
Angle = 180 + (180 - Math.Abs(Angle));
}
Outputs.Output = Vmin + ( Vmax - Vmin ) * (Angle - Angle_min) / (Angle_max - Angle_min);
return false;
}
#region When the Script is Initialized
/// <summary>
/// Perform any initialization required by your script here
/// </summary>
/// <param name="host">The host tool</param>
public override void Initialize(Cognex.VisionPro.ToolGroup.CogToolGroup host)
{
// DO NOT REMOVE - Call the base class implementation first - DO NOT REMOVE
base.Initialize(host);
}
#endregion
}
#region auto-generated
// ------------------------------------------------------------------------------
// <auto-generated>
// This code was generated by a tool.
// VisionPro Version: 9.0 CR2
// Generated: 2026/5/1 20:08:19
// Name: CogToolBlockScript, Version: 1.0
// Options:
// IncludeMainScriptClass, OverrideGroupRun,
// OverrideInitialize, IncludeInputsAdapterClass,
// IncludeOutputsAdapterClass, IncludeToolsAdapterClass,
// ExposeToolBlockReference, PlaceInAutoGeneratedRegion,
// AdapterClassIsEnumerable, IncludeRunToolFunction
//
// Changes to this code below this comment may cause incorrect behavior
// and will be lost if the code is regenerated.
// </auto-generated>
// ------------------------------------------------------------------------------
public class CogToolBlockAdvancedScript : CogToolBlockAdvancedScriptBase
{
#region Private Member Variables
private Cognex.VisionPro.ToolBlock.CogToolBlock mToolBlock;
private CollectionAdapterInputs mInputs;
private CollectionAdapterOutputs mOutputs;
#endregion
/// <summary>
/// Called when the parent tool is run.
/// Add code here to customize or replace the normal run behavior.
/// </summary>
/// <param name="message">Sets the Message in the tool's RunStatus.</param>
/// <param name="result">Sets the Result in the tool's RunStatus</param>
/// <returns>True if the tool should run normally,
/// False if GroupRun customizes run behavior</returns>
public override bool GroupRun(ref string message, ref CogToolResultConstants result)
{
// To let the execution stop in this script when a debugger is attached, uncomment the following lines.
// #if DEBUG
// if (System.Diagnostics.Debugger.IsAttached) System.Diagnostics.Debugger.Break();
// #endif
return false;
}
#region When the Script is Initialized
/// <summary>
/// Perform any initialization required by your script here
/// </summary>
/// <param name="host">The host tool</param>
public override void Initialize(Cognex.VisionPro.ToolGroup.CogToolGroup host)
{
// DO NOT REMOVE - Call the base class implementation first - DO NOT REMOVE
base.Initialize(host);
// Initialize convenience types for ToolBlock Inputs, Outputs, and Tools
this.mInputs = new CollectionAdapterInputs(((Cognex.VisionPro.ToolBlock.CogToolBlock)(host)));
this.mOutputs = new CollectionAdapterOutputs(((Cognex.VisionPro.ToolBlock.CogToolBlock)(host)));
// Store a local copy of the script host
this.mToolBlock = ((Cognex.VisionPro.ToolBlock.CogToolBlock)(host));
}
#endregion
/// <summary>
/// Access the Tool's Inputs through an adapter class
/// </summary>
public CollectionAdapterInputs Inputs
{
get
{
return this.mInputs;
}
}
/// <summary>
/// Access the Tool's Outputs through an adapter class
/// </summary>
public CollectionAdapterOutputs Outputs
{
get
{
return this.mOutputs;
}
}
#region Public Methods
/// <summary>
/// Called from a script to run a tool.
/// </summary>
/// <param name="tool">The tool to run.</param>
/// <param name="message">The RunStatus Message.</param>
/// <param name="result">The RunStatus Result.</param>
/// <exception cref="System.Exception">
/// Thrown when <paramref name="tool"/> returns and
/// the calling tool's AbortRunOnToolFailure property is True.</exception>
protected virtual void RunTool(Cognex.VisionPro.ICogTool tool, ref string message, ref CogToolResultConstants result)
{
this.mToolBlock.RunTool(tool, ref message, ref result);
}
#endregion
}
#region Adapter Classes
public class CollectionAdapterInputs
{
private Cognex.VisionPro.ToolBlock.CogToolBlock mToolBlock;
public CollectionAdapterInputs(Cognex.VisionPro.ToolBlock.CogToolBlock toolBlock)
{
this.mToolBlock = toolBlock;
}
public double Angle
{
get
{
try
{
return ((double)(this.mToolBlock.Inputs["Angle"].Value));
}
catch (System.Exception ex)
{
throw new System.Exception(String.Format(Cognex.VisionPro.CogLocalizer.GetString(typeof(Cognex.VisionPro.ToolGroup.Resources.CogResourceKeys), Cognex.VisionPro.ToolGroup.Resources.CogResourceKeys.RkScritptAdapterMemberAccessError), this.mToolBlock.Name, "Inputs.Angle"), ex);
}
}
}
}
public class CollectionAdapterOutputs
{
private Cognex.VisionPro.ToolBlock.CogToolBlock mToolBlock;
public CollectionAdapterOutputs(Cognex.VisionPro.ToolBlock.CogToolBlock toolBlock)
{
this.mToolBlock = toolBlock;
}
public double Output
{
get
{
try
{
return ((double)(this.mToolBlock.Outputs["Output"].Value));
}
catch (System.Exception ex)
{
throw new System.Exception(String.Format(Cognex.VisionPro.CogLocalizer.GetString(typeof(Cognex.VisionPro.ToolGroup.Resources.CogResourceKeys), Cognex.VisionPro.ToolGroup.Resources.CogResourceKeys.RkScritptAdapterMemberAccessError), this.mToolBlock.Name, "Outputs.Output"), ex);
}
}
set
{
this.mToolBlock.Outputs["Output"].Value = value;
}
}
}
#endregion
#endregion