一、I2C简介
- 两线式串行总线
- 属于同步通信(共用主机时钟SCL)
- 每个连接到I2C总线上的设备都有一个唯一的地址
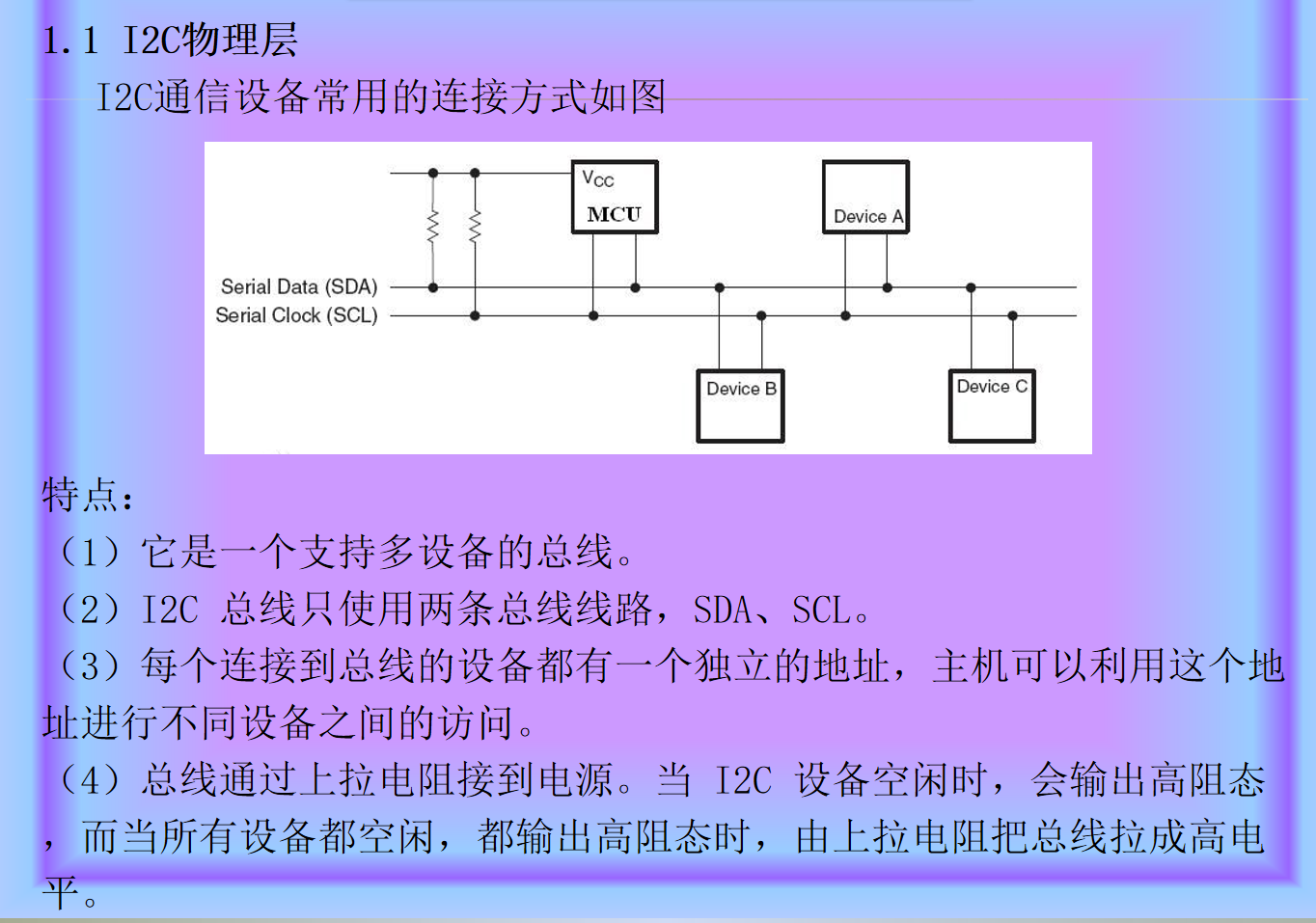
- SCL、SDA均需要接上拉电阻(设备空闲均输出高电平)
- 传输速率标准模式下100Kbit/s
- I2C协议:
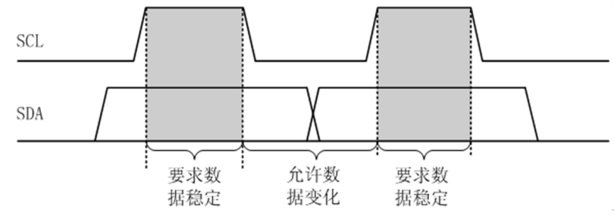
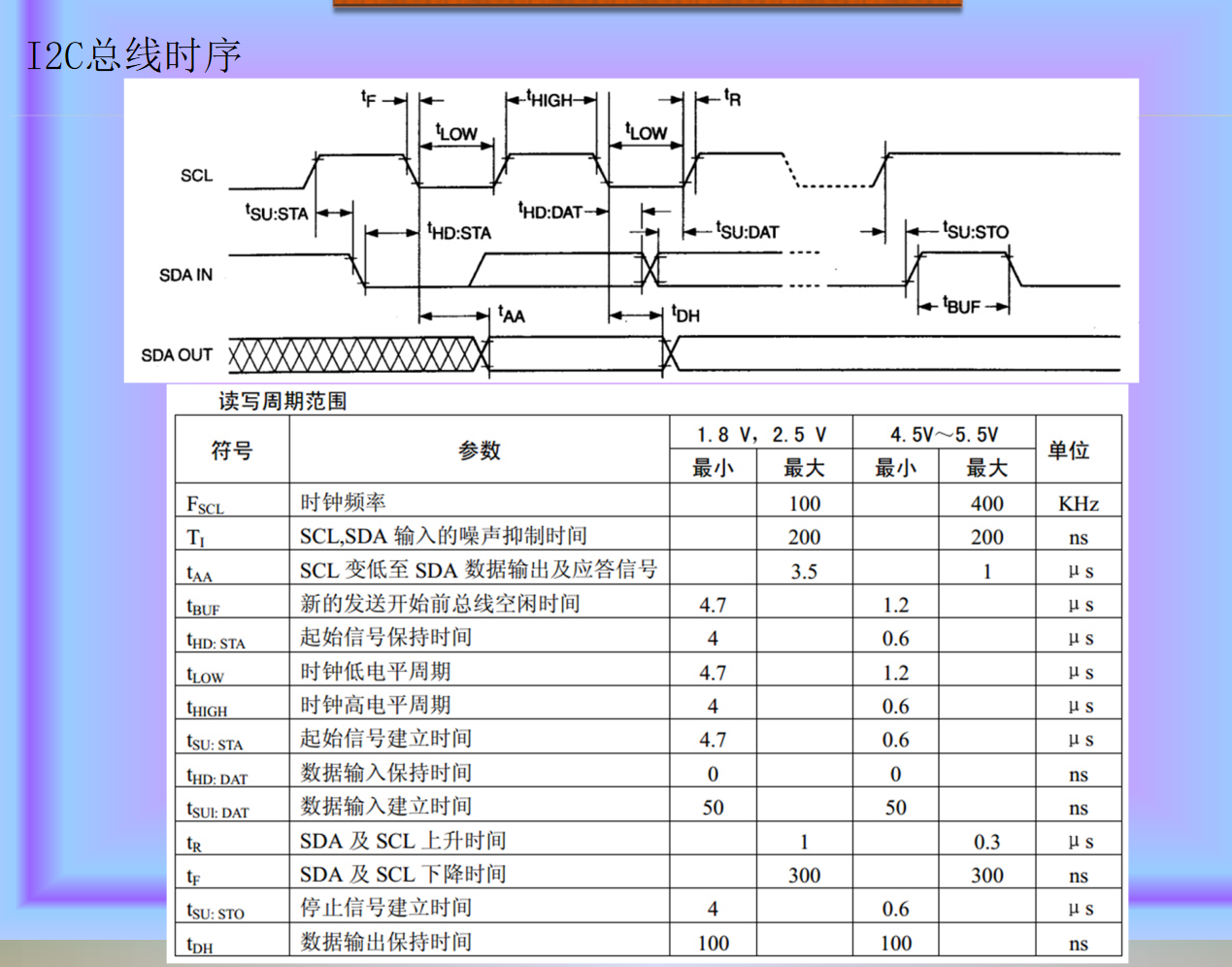
- I2C 的协议定义了通信的起始和停止信号、数据有效性、响应、仲裁
、时钟同步和地址广播等环节。 - 在SCL高电平时数据有效
3.每次数据传输都以字节为单位,每次传输的字节数不受限制 。
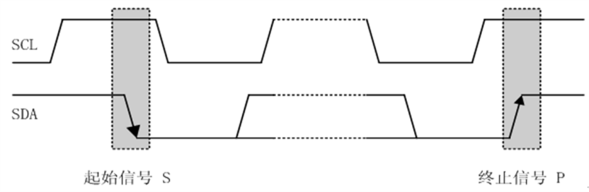
4.起始信号:SCL高电平时SDA产生下降沿
5.停止信号:SCL高电平时SDA产生上升沿
6.应答信号:传输数据的第九位时,由从机拉低SDA,在SCL高电平时读SDA,如果是低电平就表示应答:
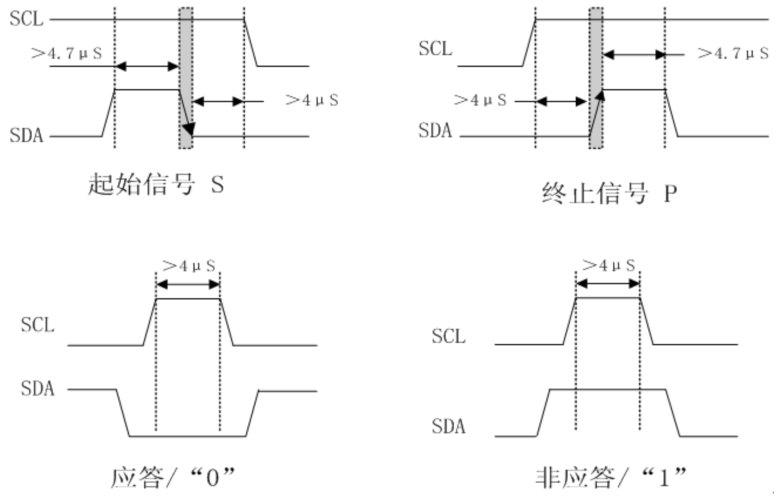
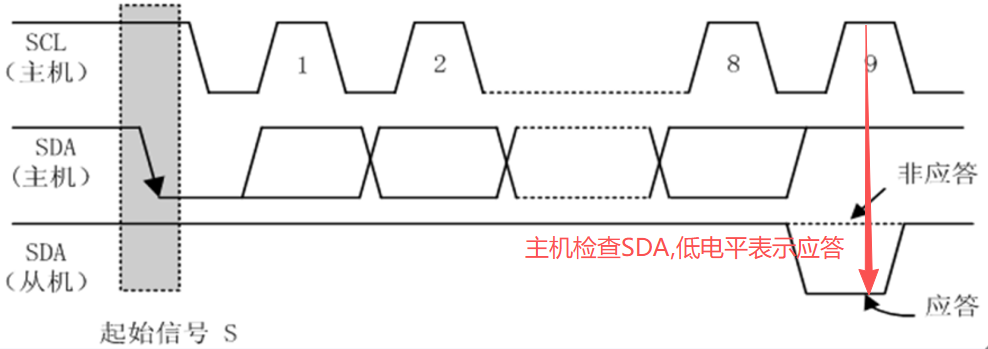
- 每个字节必须保证为8位长度(每传输一帧为9位 = 8位+1位应答)
- 数据传输时先传输最高位
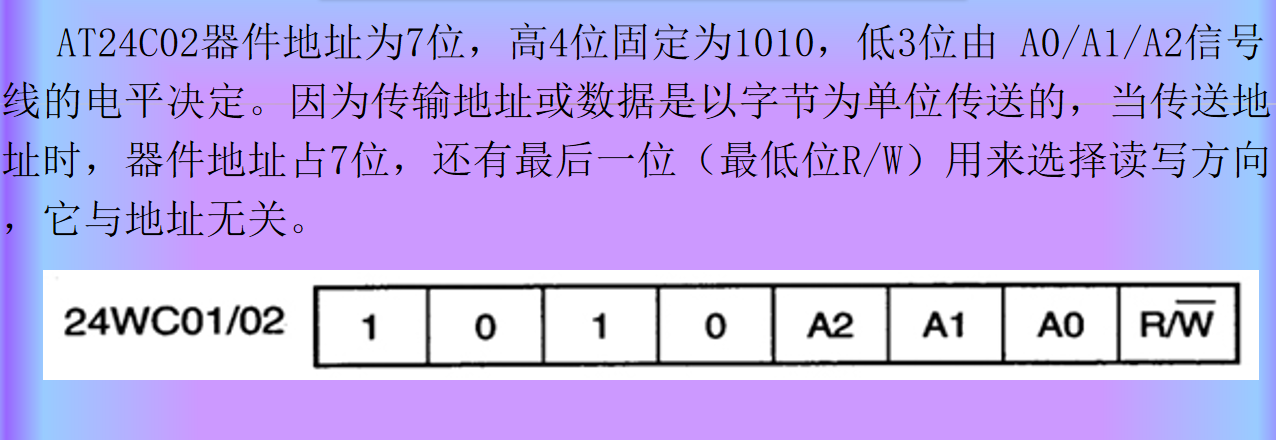
- 寻址字节是起始信号后的第一个字节(1,要针对哪个从机 2,读还是写)
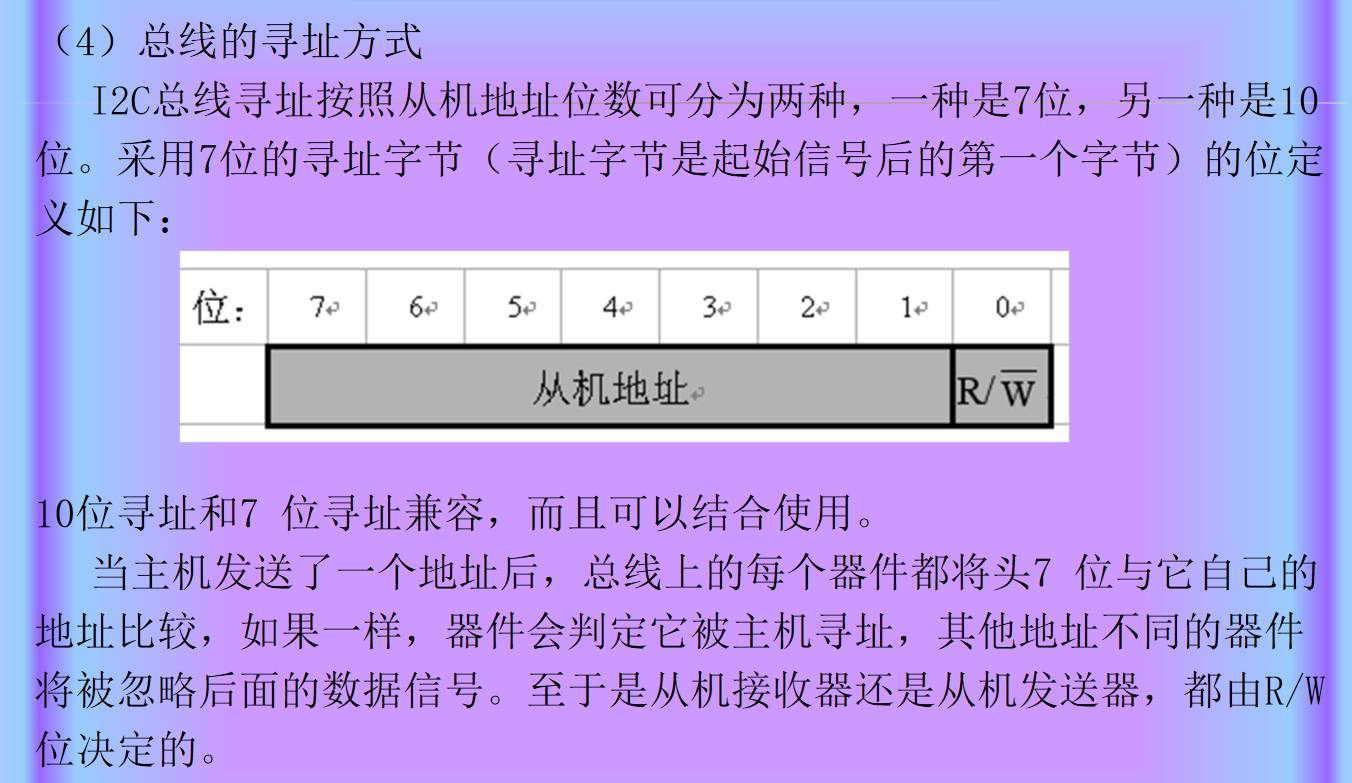
- 从机地址分为固定部分+可编程部分
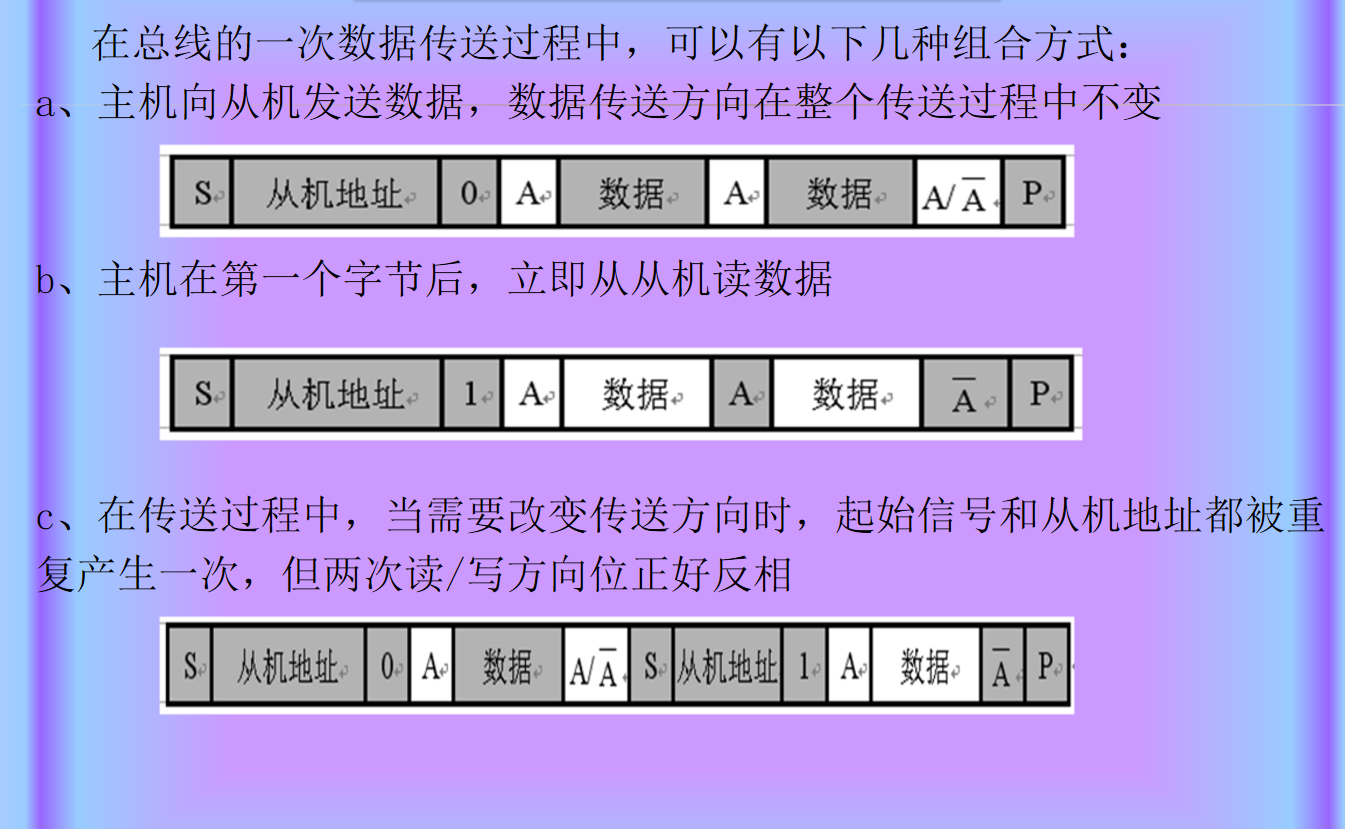
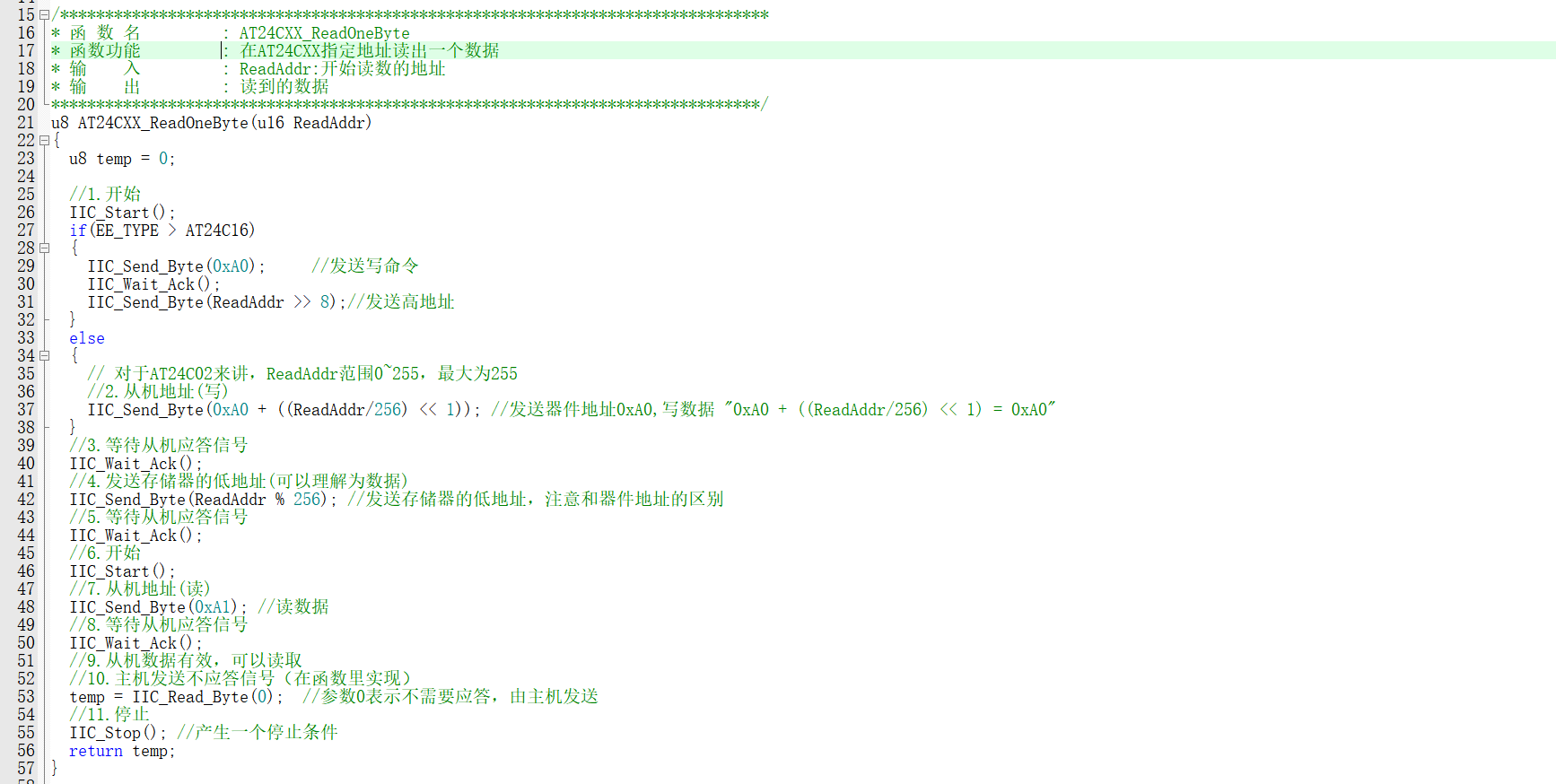
举例,读取一个字节的流程1~11完全和c这种组合方式一致:
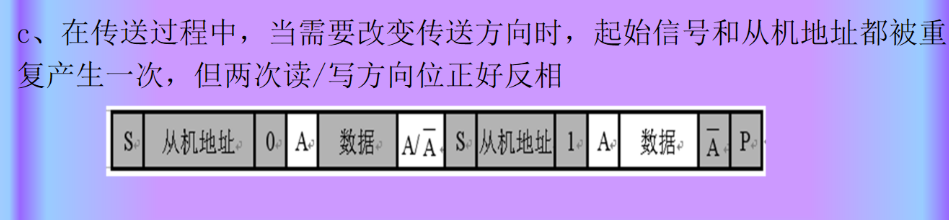
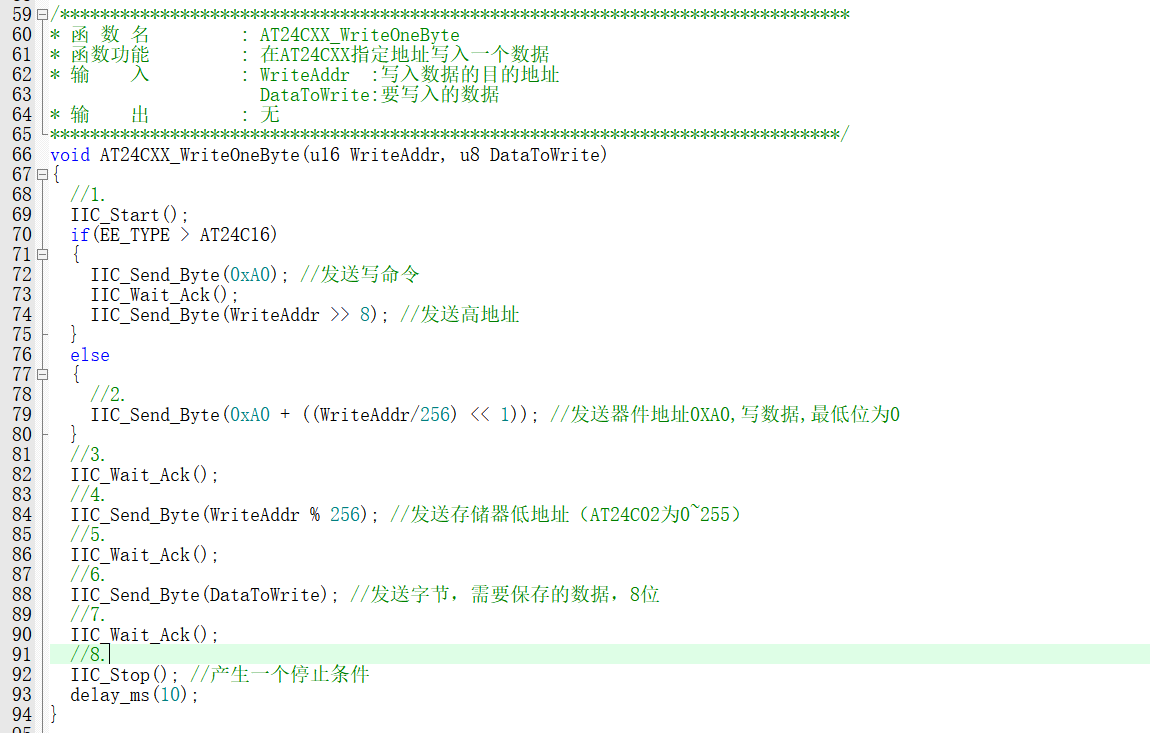
如,写数据的过程和a这种组合方式一致:

二、EEPR0M AT24C02(I2C接口)介绍
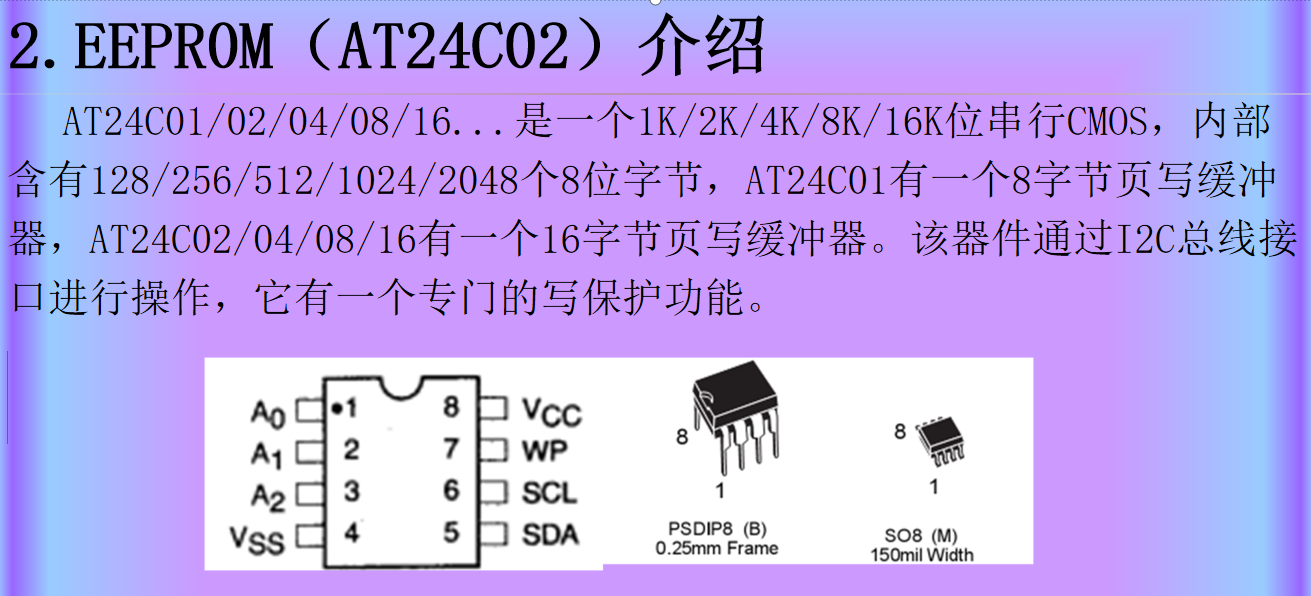
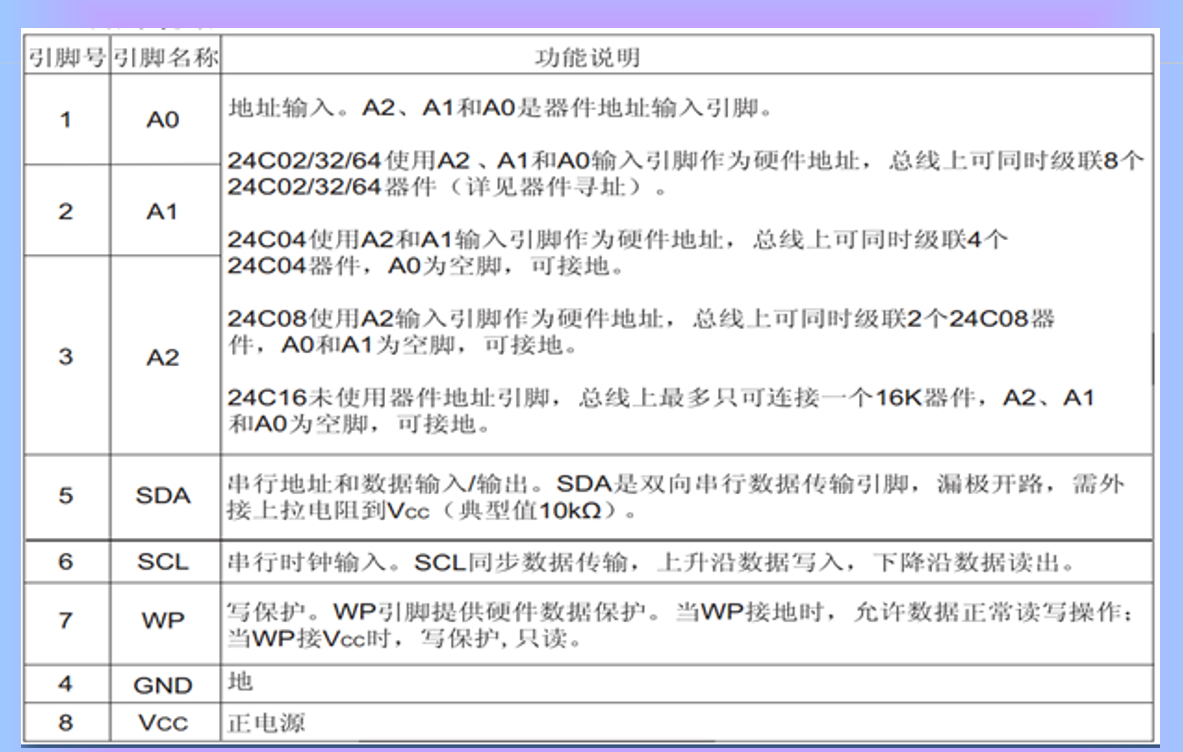
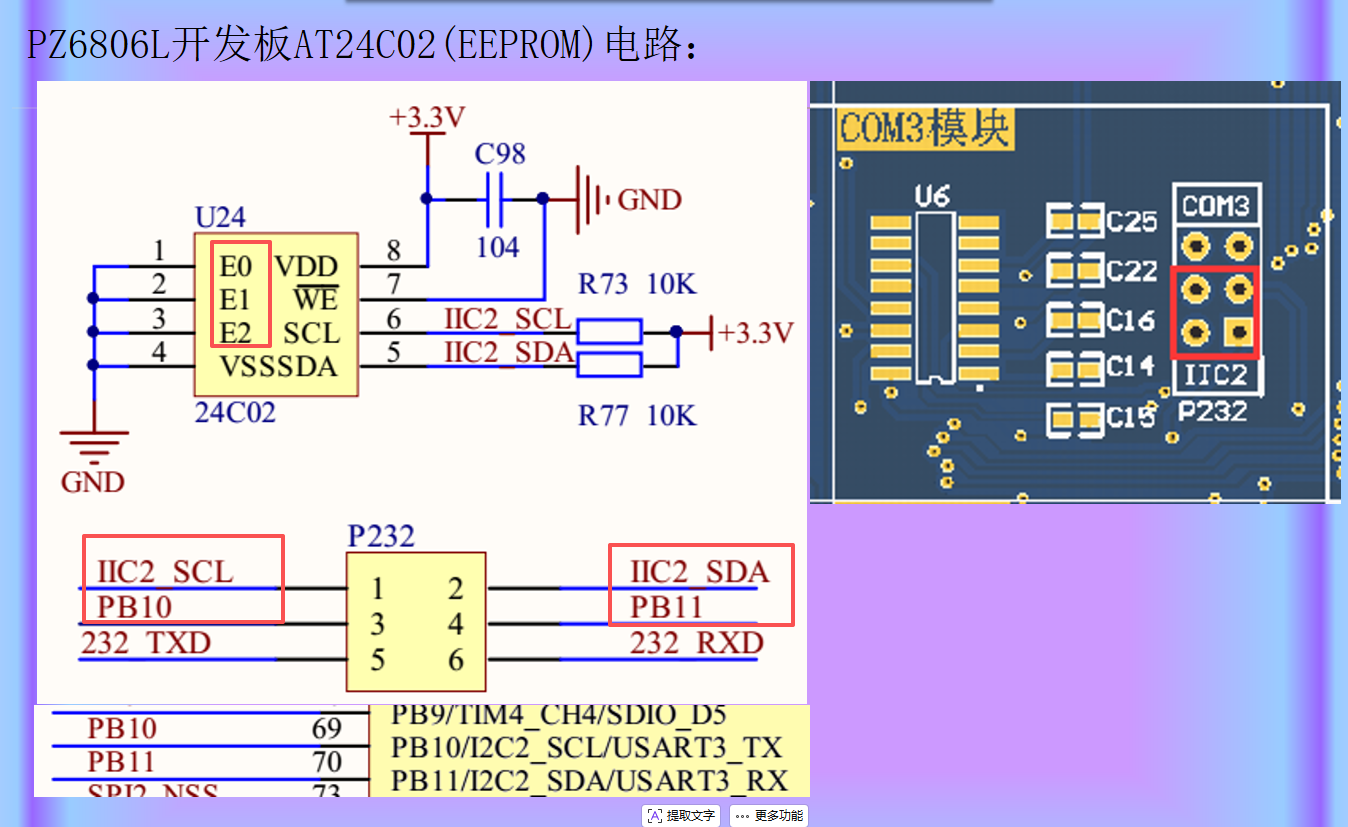
硬件介绍
使用软件模拟I2C时序。
这里设计的上拉电阻为10K:
三、工程实现
新建文件夹及文件:

iic.h
#ifndef __IIC_H
#define __IIC_H
#include "system.h"
/* IIC_SCL时钟端口、引脚定义 */
#define IIC_SCL_PORT GPIOB
#define IIC_SCL_PIN (GPIO_Pin_10)
#define IIC_SCL_PORT_RCC RCC_APB2Periph_GPIOB //为了使能端口时钟
/* IIC_SDA时钟端口、引脚定义 */
#define IIC_SDA_PORT GPIOB
#define IIC_SDA_PIN (GPIO_Pin_11)
#define IIC_SDA_PORT_RCC RCC_APB2Periph_GPIOB
//IO操作函数 使用位带操作
#define IIC_SCL PBout(10) //SCL
#define IIC_SDA PBout(11) //SDA
#define READ_SDA PBin(11) //输入SDA
/* IIC所有操作函数 */
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte(u8 ack); //IIC读取一个字节
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号,不应答
#endifiic.c
#include "iic.h"
#include "SysTick.h" //需要使用delay_us
/* IIC所有操作函数 */
void IIC_Init(void) //初始化IIC的IO口
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(IIC_SCL_PORT_RCC|IIC_SDA_PORT_RCC, ENABLE); //使能GPIOB端口时钟
GPIO_InitStructure.GPIO_Pin = IIC_SCL_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //配置为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(IIC_SCL_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = IIC_SDA_PIN;
GPIO_Init(IIC_SDA_PORT, &GPIO_InitStructure);
//总线开始为空闲状态
IIC_SCL = 1;
IIC_SDA = 1;
}
/*******************************************************************************
* 函 数 名 : SDA_OUT
* 函数功能 : SDA输出配置
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void SDA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //输出时配置为推挽输出
GPIO_Init(IIC_SDA_PORT, &GPIO_InitStructure);
}
/*******************************************************************************
* 函 数 名 : SDA_IN
* 函数功能 : SDA输入配置
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void SDA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //配置为上拉输入
GPIO_Init(IIC_SDA_PORT, &GPIO_InitStructure);
}
void IIC_Start(void) //发送IIC开始信号
{
SDA_OUT();
IIC_SDA = 1;
IIC_SCL = 1;
delay_us(5);
IIC_SDA = 0; //START:when CLK is high,DATA change form high to low 此处为起始信号
delay_us(6);
IIC_SCL = 0; //钳住I2C总线,准备发送或接收数据
}
void IIC_Stop(void) //发送IIC停止信号
{
SDA_OUT();
IIC_SCL = 0;
IIC_SDA = 0; //STOP:when CLK is high DATA change form low to high
IIC_SCL = 1;
delay_us(6);
IIC_SDA = 1; //发送I2C总线结束信号
delay_us(6);
}
/*******************************************************************************
* 函 数 名 : IIC_Wait_Ack
* 函数功能 : 主机等待应答信号到来
* 输 入 : 无
* 输 出 : 1,接收应答失败
0,接收应答成功
*******************************************************************************/
u8 IIC_Wait_Ack(void)
{
u8 tempTime = 0;
IIC_SDA = 1; //释放控制权
delay_us(1);
SDA_IN(); //SDA设置为输入
IIC_SCL = 1; //高电平开始检查应答信号
delay_us(1);
while(READ_SDA) //如果读到被拉低,则表示有应答
{
tempTime++;
if(tempTime > 250)
{
IIC_Stop();
return 1; //表示无应答
}
}
IIC_SCL = 0; //时钟输出0
return 0;
}
/*******************************************************************************
* 函 数 名 : IIC_Ack
* 函数功能 : 主机产生ACK应答
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void IIC_Ack(void)
{
IIC_SCL = 0;
SDA_OUT();
IIC_SDA = 0;
delay_us(2);
IIC_SCL = 1; //时钟有效了,延时一会后把IIC_SCL拉低,表示应答信号
delay_us(5);
IIC_SCL = 0;
}
/*******************************************************************************
* 函 数 名 : IIC_NAck
* 函数功能 : 主机产生NACK非应答
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void IIC_NAck(void)
{
IIC_SCL = 0;
SDA_OUT();
IIC_SDA = 1;
delay_us(2);
IIC_SCL = 1;
delay_us(5);
IIC_SCL = 0;
}
/*******************************************************************************
* 函 数 名 : IIC_Send_Byte
* 函数功能 : IIC发送一个字节
* 输 入 : txd:发送一个字节
* 输 出 : 无
*******************************************************************************/
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL = 0;//拉低时钟开始数据传输
for(t = 0; t < 8; t++)
{
if((txd&0x80) > 0) //0x80 1000 0000 判断8位最高位是1还是0,下一步是发送
IIC_SDA = 1;
else
IIC_SDA = 0;
txd<<=1; //将低位移到最高位,等待下一位的发送
delay_us(2); //对TEA5767这三个延时都是必须的(数据保持)
IIC_SCL = 1; //数据开始有效,此时不能被更改
delay_us(2);
IIC_SCL = 0; //时钟为低电平,数据失效
delay_us(2);
}
}
/*******************************************************************************
* 函 数 名 : IIC_Read_Byte
* 函数功能 : IIC读一个字节
* 输 入 : ack=1时,发送ACK,ack=0,发送nACK
* 输 出 : 应答或非应答
*******************************************************************************/
u8 IIC_Read_Byte(u8 ack)
{
u8 i, receive = 0;
SDA_IN(); //SDA设置为输入
for(i = 0; i < 8; i++)
{
IIC_SCL = 0;
delay_us(2);
IIC_SCL = 1; //时钟有效,开始读取IIC_SDA上的数据
receive<<=1; //i = 0时该左移无效
if(READ_SDA)
receive++;
delay_us(1);
}
if(!ack)
IIC_NAck(); //发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}AT24Cxx.h
#ifndef __AT24CXX_H
#define __AT24CXX_H
#include "system.h"
#include "iic.h"
#define AT24C01 127
#define AT24C02 255 //我们PZ6806L是这个
#define AT24C04 511
#define AT24C08 1023
#define AT24C16 2047
#define AT24C32 4095
#define AT24C64 8191
#define AT24C128 16383
#define AT24C256 32767
//开发板使用的是AT24C02,所以定义EE_TYPE为AT24C02
#define EE_TYPE AT24C02
u8 AT24CXX_ReadOneByte(u16 ReadAddr); //指定地址读取一个字节
void AT24CXX_WriteOneByte(u16 WriteAddr, u8 DataToWrite); //指定地址写入一个字节
void AT24CXX_WriteLenByte(u16 WriteAddr, u32 DataToWrite,u8 Len); //指定地址开始写入指定长度的数据
u32 AT24CXX_ReadLenByte(u16 ReadAddr, u8 Len); //指定地址开始读取指定长度数据
void AT24CXX_Write(u16 WriteAddr,u8 *pBuffer, u16 NumToWrite); //从指定地址开始写入指定长度的数据
void AT24CXX_Read(u16 ReadAddr, u8 *pBuffer, u16 NumToRead); //从指定地址开始读出指定长度的数据
u8 AT24CXX_Check(void); //检查器件
void AT24CXX_Init(void); //初始化IIC
#endifAT24Cxx.c
#include "AT24Cxx.h"
#include "SysTick.h"
/*******************************************************************************
* 函 数 名 : AT24CXX_Init
* 函数功能 : AT24CXX初始化
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void AT24CXX_Init(void)
{
IIC_Init(); //IIC初始化
}
/*******************************************************************************
* 函 数 名 : AT24CXX_ReadOneByte
* 函数功能 : 在AT24CXX指定地址读出一个数据
* 输 入 : ReadAddr:开始读数的地址
* 输 出 : 读到的数据
*******************************************************************************/
u8 AT24CXX_ReadOneByte(u16 ReadAddr)
{
u8 temp = 0;
//1.开始
IIC_Start();
if(EE_TYPE > AT24C16)
{
IIC_Send_Byte(0xA0); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(ReadAddr >> 8);//发送高地址
}
else
{
// 对于AT24C02来讲,ReadAddr范围0~255,最大为255
//2.从机地址(写)
IIC_Send_Byte(0xA0 + ((ReadAddr/256) << 1)); //发送器件地址0xA0,写数据 "0xA0 + ((ReadAddr/256) << 1) = 0xA0"
}
//3.等待从机应答信号
IIC_Wait_Ack();
//4.发送存储器的低地址(可以理解为数据)
IIC_Send_Byte(ReadAddr % 256); //发送存储器的低地址,注意和器件地址的区别
//5.等待从机应答信号
IIC_Wait_Ack();
//6.开始
IIC_Start();
//7.从机地址(读)
IIC_Send_Byte(0xA1); //读数据
//8.等待从机应答信号
IIC_Wait_Ack();
//9.从机数据有效,可以读取
//10.主机发送不应答信号(在函数里实现)
temp = IIC_Read_Byte(0); //参数0表示不需要应答,由主机发送
//11.停止
IIC_Stop(); //产生一个停止条件
return temp;
}
/*******************************************************************************
* 函 数 名 : AT24CXX_WriteOneByte
* 函数功能 : 在AT24CXX指定地址写入一个数据
* 输 入 : WriteAddr :写入数据的目的地址
DataToWrite:要写入的数据
* 输 出 : 无
*******************************************************************************/
void AT24CXX_WriteOneByte(u16 WriteAddr, u8 DataToWrite)
{
//1.
IIC_Start();
if(EE_TYPE > AT24C16)
{
IIC_Send_Byte(0xA0); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(WriteAddr >> 8); //发送高地址
}
else
{
//2.
IIC_Send_Byte(0xA0 + ((WriteAddr/256) << 1)); //发送器件地址0XA0,写数据,最低位为0
}
//3.
IIC_Wait_Ack();
//4.
IIC_Send_Byte(WriteAddr % 256); //发送存储器低地址(AT24C02为0~255)
//5.
IIC_Wait_Ack();
//6.
IIC_Send_Byte(DataToWrite); //发送字节,需要保存的数据,8位
//7.
IIC_Wait_Ack();
//8.
IIC_Stop(); //产生一个停止条件
delay_ms(10);
}
/*******************************************************************************
* 函 数 名 : AT24CXX_WriteLenByte
* 函数功能 : 在AT24CXX里面的指定地址开始写入长度为Len的数据
用于写入16bit或者32bit的数据
* 输 入 : WriteAddr :写入数据的目的地址
DataToWrite:要写入的数据
Len :要写入数据的长度2,4
* 输 出 : 无
*******************************************************************************/
void AT24CXX_WriteLenByte(u16 WriteAddr, u32 DataToWrite, u8 Len)
{
u8 t;
for(t = 0; t < Len; t++)
{
AT24CXX_WriteOneByte(WriteAddr + t, (DataToWrite >> (8 * t)) & 0xff);
}
}
/*******************************************************************************
* 函 数 名 : AT24CXX_ReadLenByte
* 函数功能 : 在AT24CXX里面的指定地址开始读出长度为Len的数据
用于读出16bit或者32bit的数据
* 输 入 : ReadAddr :开始读出的地址
Len :要读出数据的长度2,4
* 输 出 : 读取的数据
*******************************************************************************/
u32 AT24CXX_ReadLenByte(u16 ReadAddr, u8 Len)
{
u8 t;
u32 temp = 0;
for(t = 0; t < Len; t++)
{
temp <<= 8;
temp += AT24CXX_ReadOneByte(ReadAddr + Len - t -1);
}
return temp;
}
/*******************************************************************************
* 函 数 名 : AT24CXX_Check
* 函数功能 : 检查AT24CXX是否正常(通过测试能否读写来检查)
* 输 入 : 无
* 输 出 : 1:检测失败,0:检测成功
*******************************************************************************/
u8 AT24CXX_Check(void)
{
u8 temp;
temp=AT24CXX_ReadOneByte(255); //避免每次开机都写AT24CXX
if(temp == 0x36)
return 0;
else//排除第一次初始化的情况
{
AT24CXX_WriteOneByte(255, 0x36);
temp = AT24CXX_ReadOneByte(255);
if(temp == 0x36)
return 0;
}
return 1;
}
/*******************************************************************************
* 函 数 名 : AT24CXX_Read
* 函数功能 : 在AT24CXX里面的指定地址开始读出指定个数的数据
* 输 入 : ReadAddr :开始读出的地址 对24c02为0~255
pBuffer :数据数组首地址
NumToRead:要读出数据的个数
* 输 出 : 无
*******************************************************************************/
void AT24CXX_Read(u16 ReadAddr, u8 *pBuffer, u16 NumToRead)
{
while(NumToRead)
{
*pBuffer++ = AT24CXX_ReadOneByte(ReadAddr++);
NumToRead--;
}
}
/*******************************************************************************
* 函 数 名 : AT24CXX_Write
* 函数功能 : 在AT24CXX里面的指定地址开始写入指定个数的数据
* 输 入 : WriteAddr :开始写入的地址 对24c02为0~255
pBuffer :数据数组首地址
NumToRead:要读出数据的个数
* 输 出 : 无
*******************************************************************************/
void AT24CXX_Write(u16 WriteAddr, u8 *pBuffer, u16 NumToWrite)
{
while(NumToWrite--)
{
AT24CXX_WriteOneByte(WriteAddr, *pBuffer);
WriteAddr++;
pBuffer++;
}
}main.c
#include "system.h"
#include "SysTick.h"
#include "led.h"
#include "usart.h"
#include "key.h"
#include "AT24Cxx.h"
int main()
{
u8 i=0;
u8 key;
u8 k=0;
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组
LED_Init();
USART1_Init(9600);
KEY_Init();
AT24CXX_Init();
while(AT24CXX_Check()) //检测AT24C02是否正常
{
printf("AT24C02检测不正常! \r\n");
delay_ms(500);
}
printf("AT24C02检测正常! \r\n");
while(1)
{
key = KEY_Scan(0);
if(key == KEY_UP)
{
k++;
if(k > 255)
{
k = 255;
}
AT24CXX_WriteOneByte(0, k);
printf("写入的数据是:%d\r\n", k);
}
if(key == KEY_DOWN)
{
k = AT24CXX_ReadOneByte(0);
printf("读取的数据是:%d\r\n", k);
}
i++;
if(i%20 == 0)
{
led1 = !led1;
}
delay_ms(10);
}
}- iic.x文件里注要实现标准iic的起始信号、停止信号等时序,为了通用
- 以AT24Cxx.x文件主要实现iic具体器件的读写要求(如1字节从机器件地址和写 + 1字节从机操作地址 + 1字节要写的数据)
实验现象:
