目录
1.摘要
针对电网多设施(输电杆塔、变电站、配电杆)巡检任务的时频异构性,本文提出一种基于固定机巢无人机混合巡检策略,并设计两阶段启发式算法(时空聚类按日分配结合双层ALNS算法),实现任务分配与无人机路径规划的联合优化。
2.问题描述与建模
问题描述
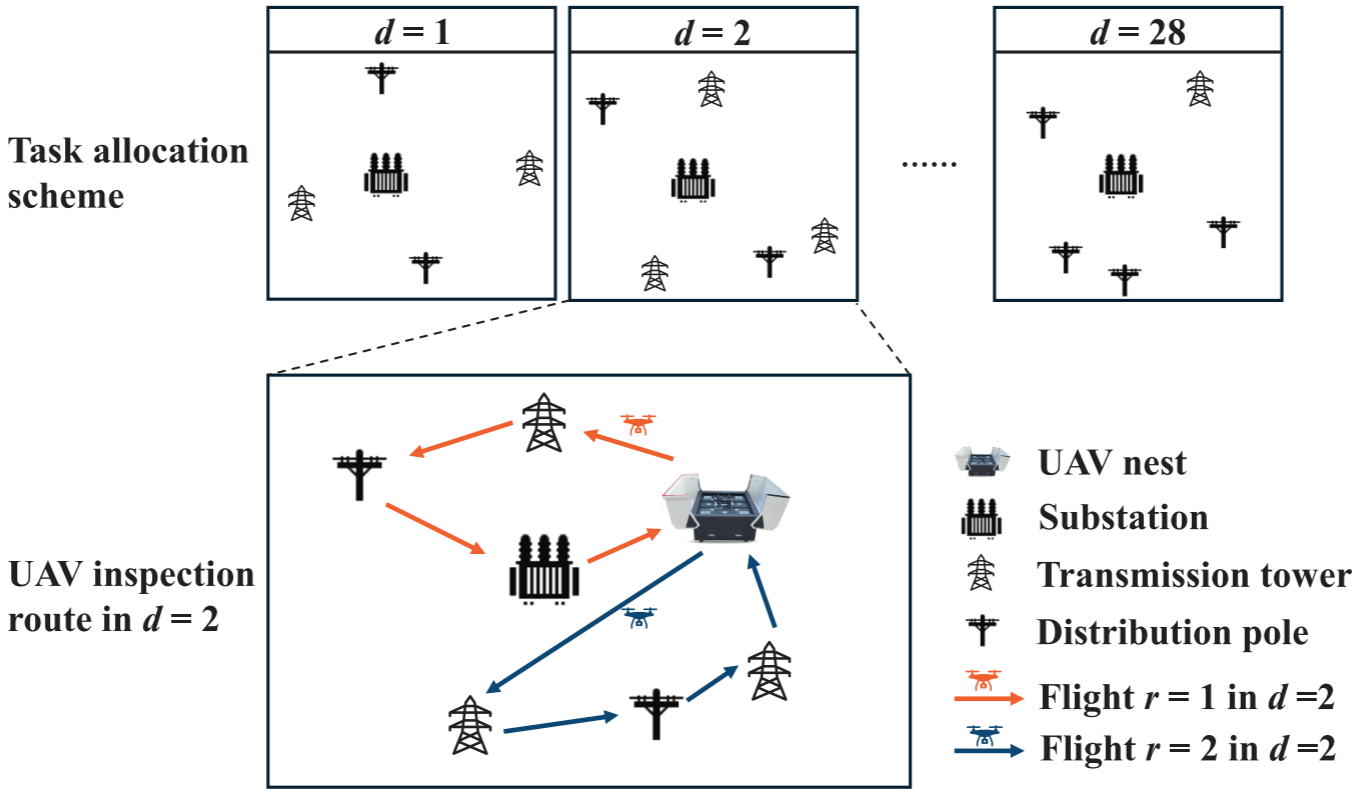
本文研究固定机巢 o o o 下单无人机对电力设施的联合巡检调度与路径规划问题,巡检目标总集合包含变电站 N 1 N_{1} N1、输电杆塔 N 2 N_{2} N2与配电杆 N 3 N_{3} N3,规划期为28天:
N = N 1 ∪ N 2 ∪ N 3 , D = { 1 , 2 , . . . , 28 } N=N_1\cup N_2\cup N_3,\quad D=\{1,2,...,28\} N=N1∪N2∪N3,D={1,2,...,28}
三类设施须严格遵守每日、每周和每月的巡检频率要求,各节点 i i i 的巡检耗时记为 s i s_i si。在单日机巢
的有效作业时间窗内,无人机可执行多轮次飞行:
δ s t a r t , δ e n d \] \[\\delta_{start},\\delta_{end}\] \[δstart,δend
每轮任务须从机巢满电出发,并在最大续航限度 L L L内返回。在已知节点间欧式距离 d i j d_{ij} dij,且假设无人机巡航速度 v v v恒定、充电时间与耗电量呈线性正比(最大充满时间为 c m a x c_{max} cmax)前提下,模型旨在联合优化日度任务分配与多轮飞行路径,以最小化无人机总飞行距离。
模型构建
模型最小化总飞行距离:
min Z = ∑ d ∈ D ∑ r ∈ R ∑ i ∈ V o ∑ j ∈ V o ′ d i j x i j r d \min Z=\sum_{d\in D}\sum_{r\in R}\sum_{i\in V_o}\sum_{j\in V_o^{\prime}}d_{ij}x_{ijr}^d minZ=d∈D∑r∈R∑i∈Vo∑j∈Vo′∑dijxijrd
约束包括变电站每日、输电杆塔每周及配电杆每月的异构巡检频次要求;保障机巢起降与各节点访问的连通性及网络流量守恒;界定单次飞行不超过最大续航限度 L L L,基于大M法推演节点间访问时间,并约束所有起降与飞行均须在机巢有效作业时间窗 δ s t a r t , δ e n d \left\\delta_{start},\\delta_{end}\\right δstart,δend内完成;规范同日多轮次任务的时序衔接,明确相邻轮次间须满足与实际飞行耗时呈正比的线性充电时间限制:
c r d = c m a x ⋅ T o ′ r d − T o r d L c_r^d=c_{max}\cdot\frac{T_{o^{\prime}r}^d-T_{or}^d}L crd=cmax⋅LTo′rd−Tord
3.算法设计
任务分配算法
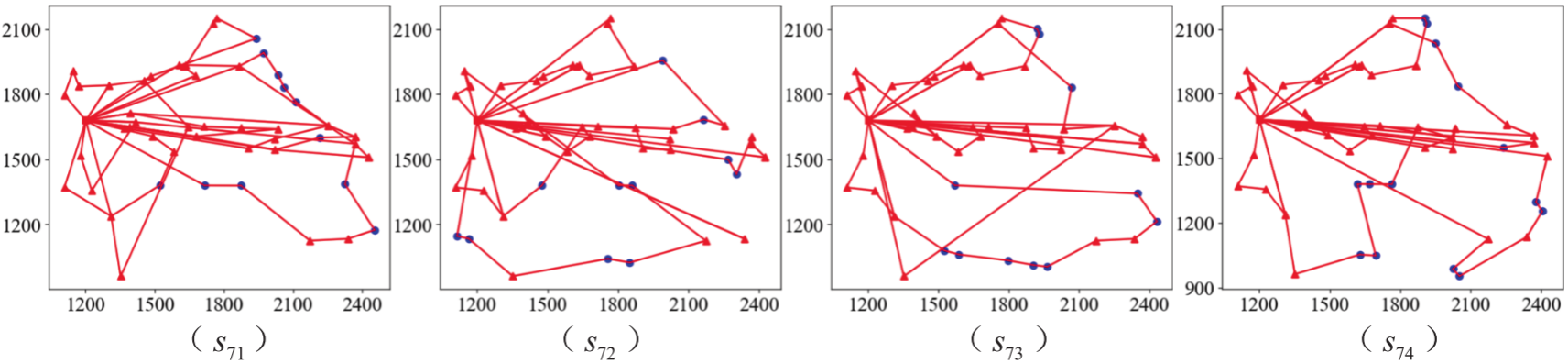
本文提出一种面向周期负载均衡任务分配算法 ,将原始地理坐标投影至二维平面以消除定位误差并保护隐私。将28天规划期划分为4个7天周期,并根据空间分布将全局任务划分为7个紧凑且均衡的空间聚类 { C 1 , C 2 , . . . , C 7 } \{C_1,C_2,...,C_7\} {C1,C2,...,C7}。
设第 j j j周期第 i i i天的任务集为 D i j D_{ij} Dij,为严格匹配异构巡检频次,第 i i i聚类内的输电杆塔集合 T i T_i Ti被整体分配至所有周期的第 i i i天 (周检);该聚类内的配电杆集合 P i P_i Pi则被均分为四个互不相交的子集分配至对应周期的第 i i i天(月检),各子集须满足:
R i 1 ∪ R i 2 ∪ R i 3 ∪ R i 4 = P i R_{i1}\cup R_{i2}\cup R_{i3}\cup R_{i4}=P_i Ri1∪Ri2∪Ri3∪Ri4=Pi
日度路径规划自适应大邻域搜索(ALNS)算法
本文设计了一种双层自适应大邻域搜索算法(ALNS),基于贪心策略生成满足无人机续航航约束的单日初始路径。在核心迭代搜索阶段,构建了周期内(Intra-cycle)与周期间(Inter-cycle)两层破坏与修复算子。算法采用轮盘赌机制选择算子,并依据历史寻优得分动态更新算子权重:
w i = ρ w i + ( 1 − ρ ) π i θ i w_i = \rho w_i + (1 - \rho) \frac{\pi_i}{\theta_i} wi=ρwi+(1−ρ)θiπi
在修复阶段,贪心修复与后悔修复的节点最优插入位置评估准则分别如下所示:
arg min u ∈ U , g ∈ G ( u ) o b j ( s u , g ) \arg \min_{u \in U, g \in G(u)} obj(s_{u,g}) argu∈U,g∈G(u)minobj(su,g)
arg max u ∈ U { ∑ i = 2 n ( o b j ( s i ( u ) ) − o b j ( s 1 ( u ) ) ) } \arg \max_{u \in U} \left\{ \sum_{i=2}^{n} (obj(s_i(u)) - obj(s_1(u))) \right\} argu∈Umax{i=2∑n(obj(si(u))−obj(s1(u)))}
为提升全局搜索能力,算法引入门限接受(TA)准则,允许以动态衰减的容忍度接受劣解。
4.结果展示
5.参考文献
Gao F, Liu J, Feng Q, et al. Task allocation and route planning for UAV-based hybrid inspection of transmission towers, substations, and distribution poles from a fixed nestJ. Expert Systems with Applications, 2026, 313: 131625.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx