前言
本示例展示了曲轴基于灵敏度的拓扑优化的基本工作流程。
该模型为简化曲轴模型,设计区域采用壳单元建模,轴体部分采用梁单元建模,壳单元与梁单元之间通过 RBE2 多点约束单元 进行耦合连接。
本次优化的目标是通过体积最小化实现曲轴的轻量化。此外,优化还考虑了两项转动位移约束,并额外对重心位置设置了约束。为了提升收敛性,将结构的初始体积分数设定为 90%。
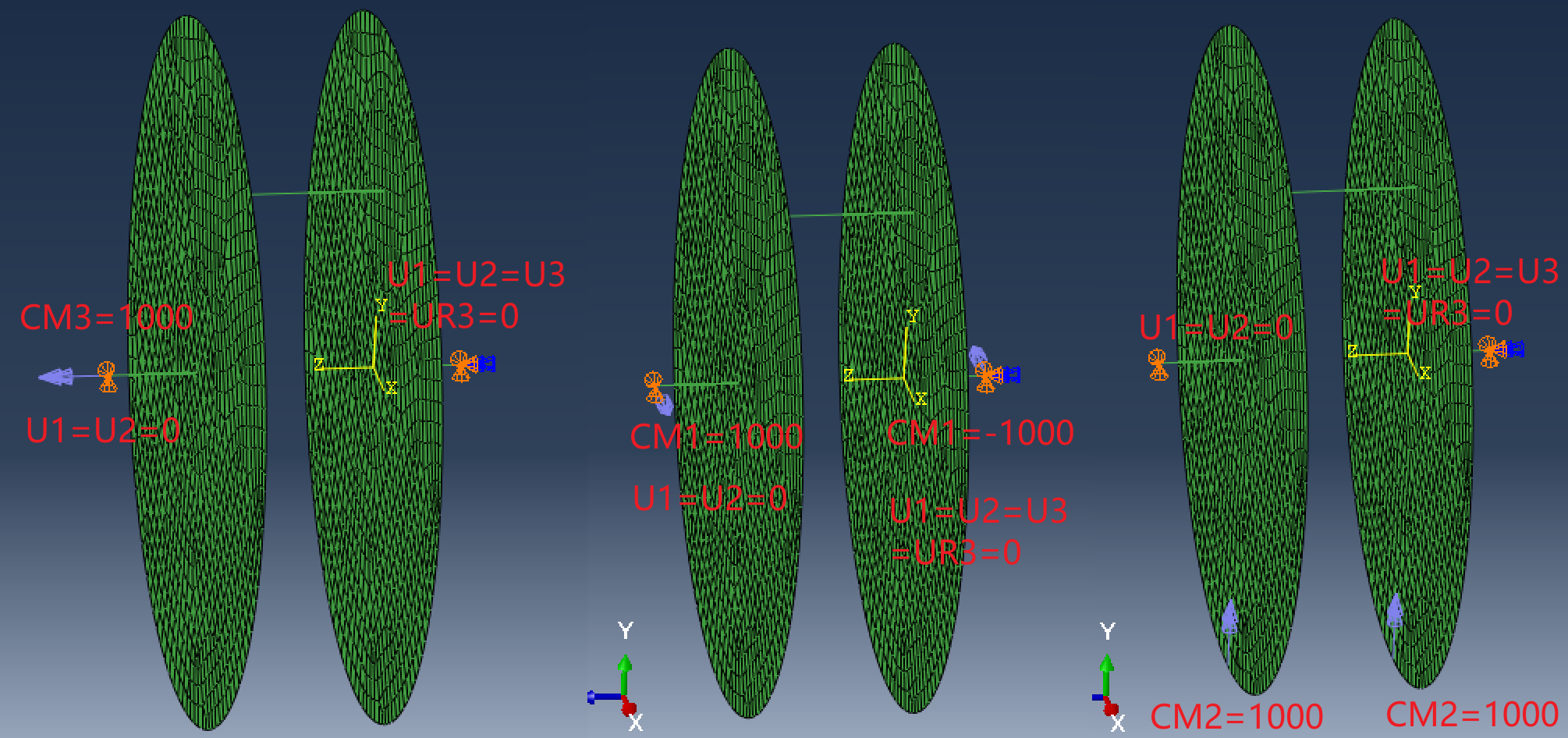
一共三个静态,线性摄动分析步,三个分析步的约束条件均为:(左侧节点:U1=U2=0,右侧节点 U1=U2=U3=UR3=0),第一个分析步载荷:左侧节点承受绕Z轴1000Nm的扭矩载荷作用;第二个分析步载荷:左侧节点承受绕X 轴1000Nm的弯矩载荷作用,右侧节点承受绕X 轴-1000Nm的弯矩载荷作用;第三个分析步载荷:左右两侧下方节点承受绕Y轴1000Nm的弯矩载荷作用。
本页讨论
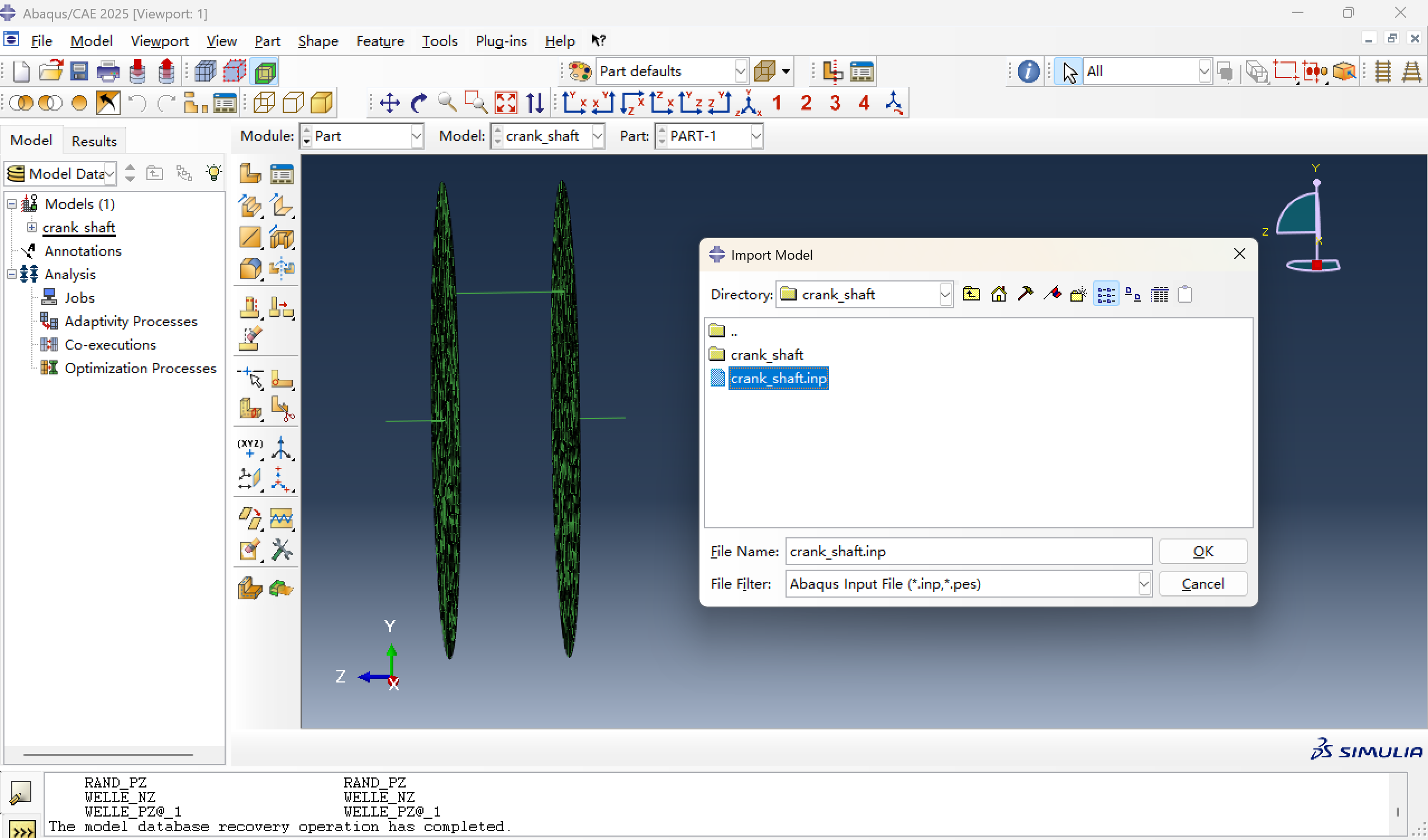
一、导入crank_shaft.inp文件
二、设置优化
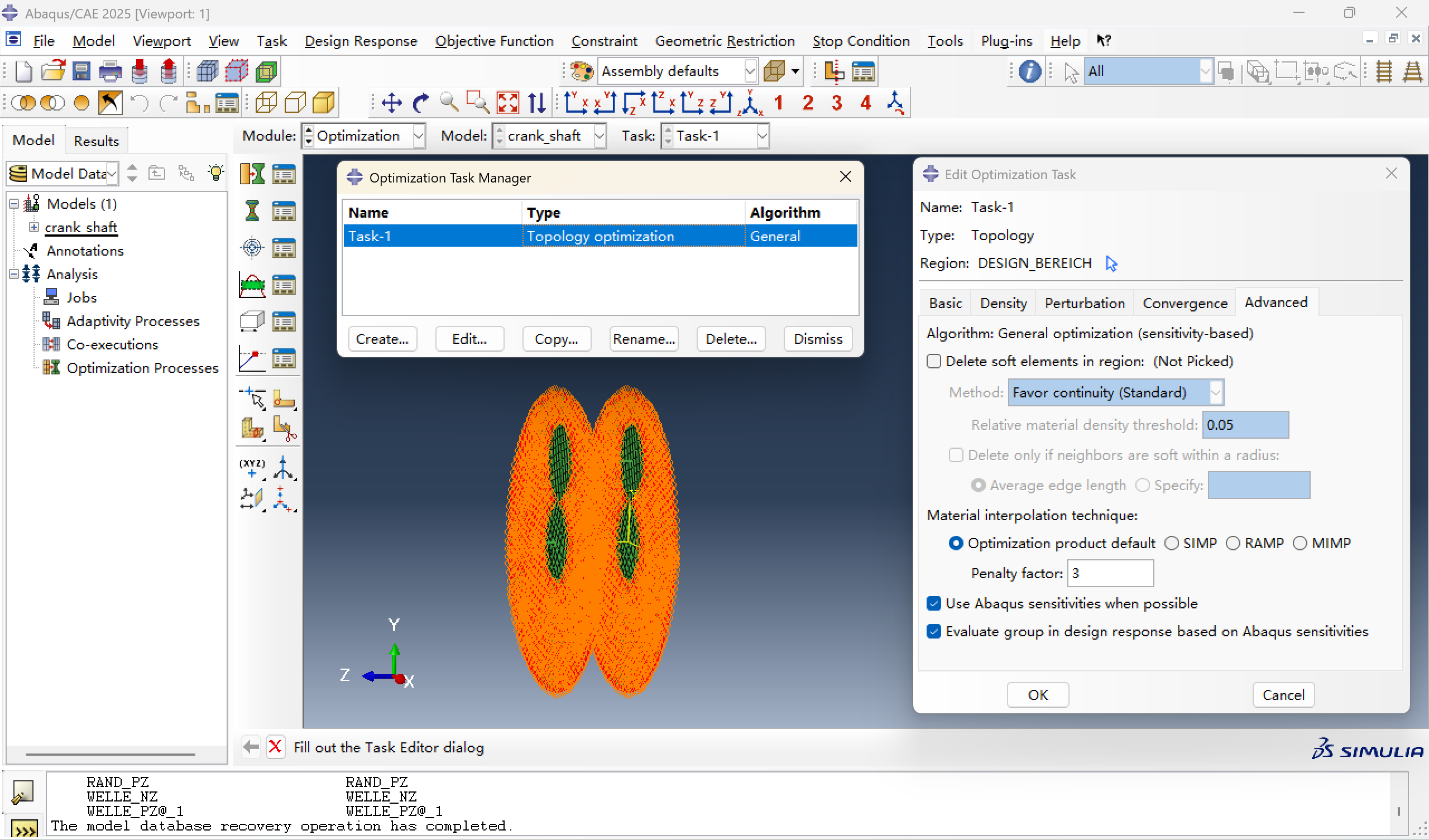
1.创建优化任务
在OPTIMIZATION模块,创建基于灵敏度的拓扑优化任务Task-1。
2、创建设计响应
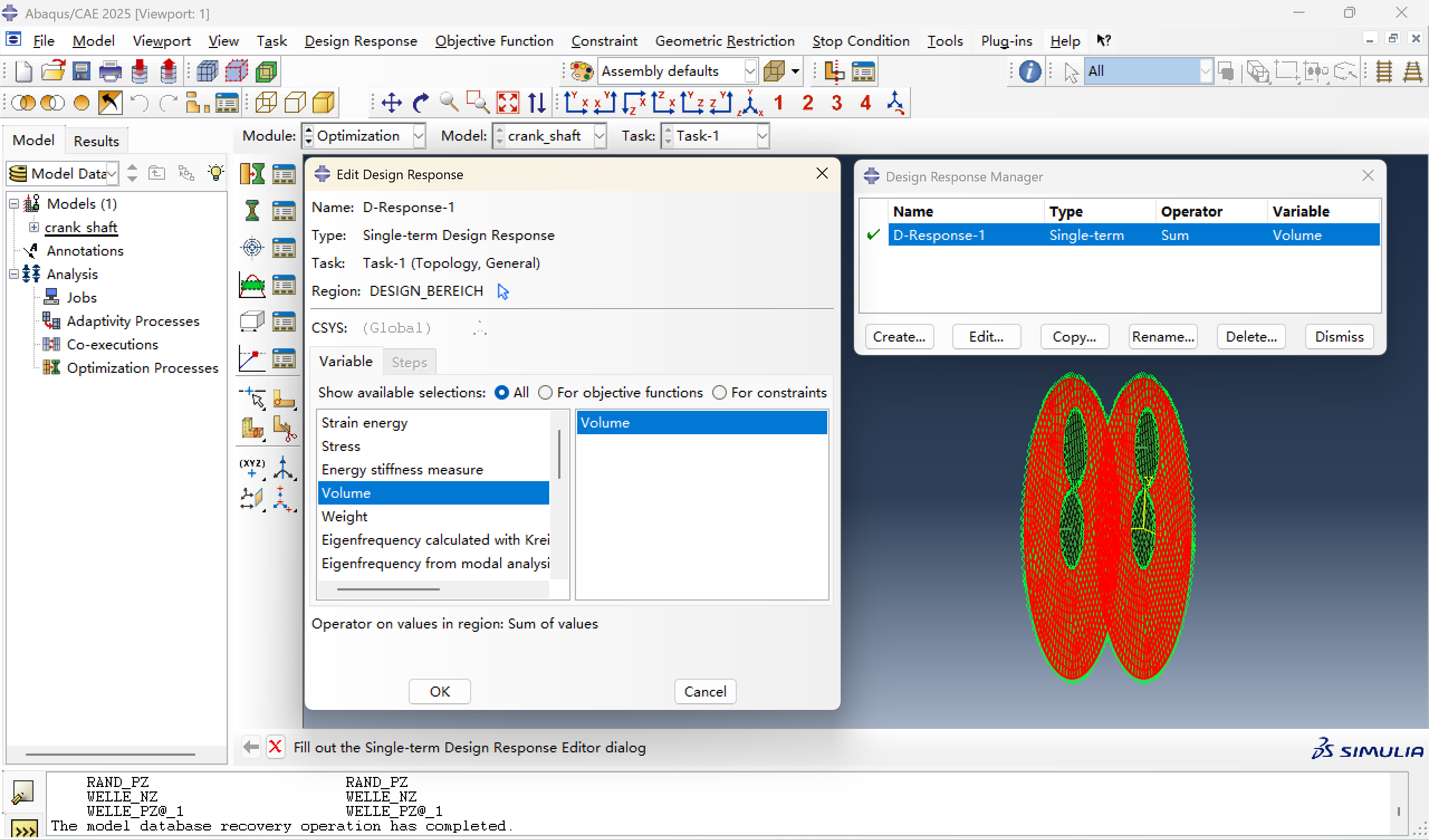
- 定义结构体积的设计响应:设计区域中所有单元的体积总和D-Response-1。
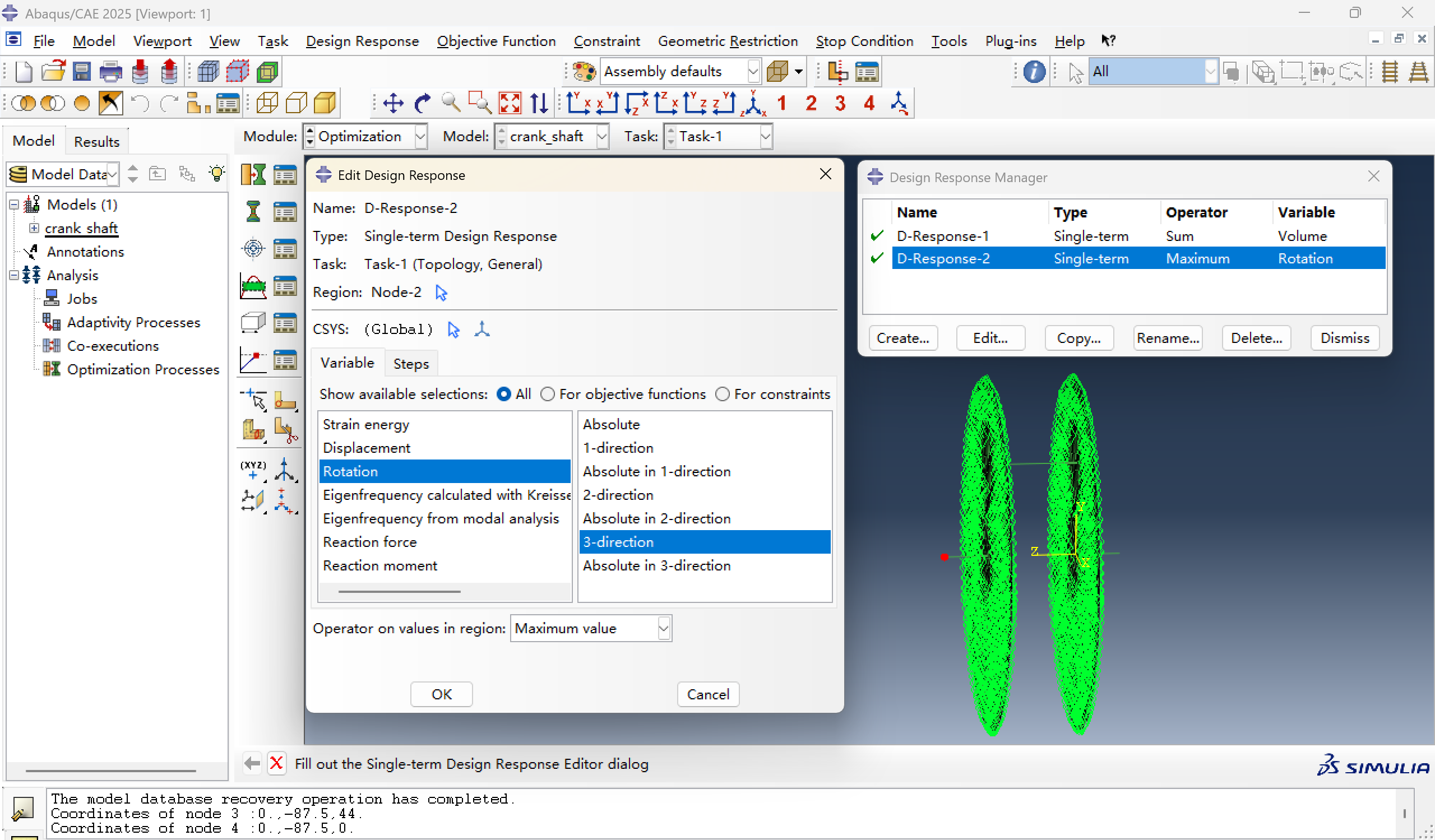
- 定义节点2绕Z轴角位移的设计响应D-Response-2:第一个载荷工况下节点2沿Z轴的角位移。
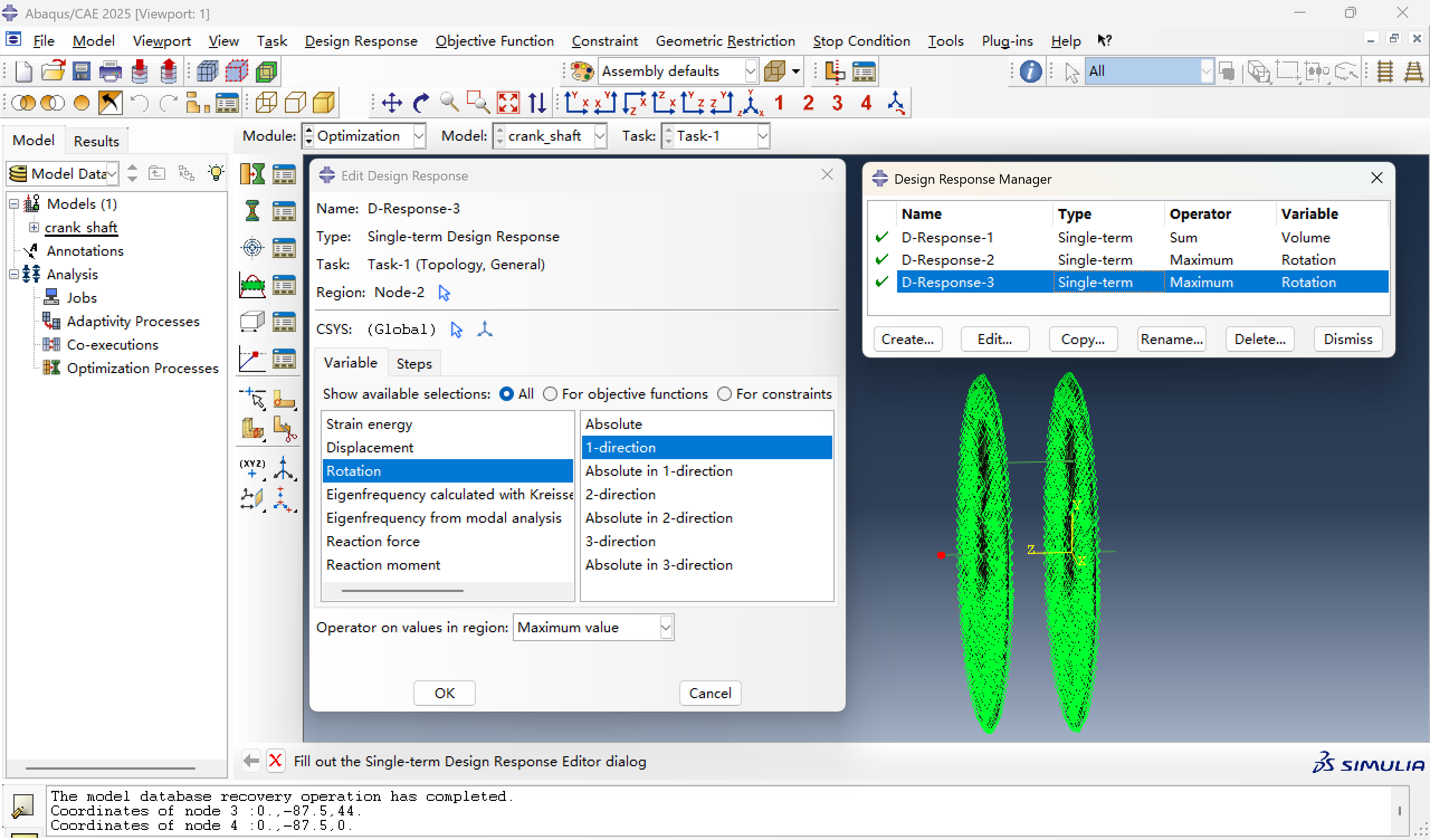
- 定义节点2绕X轴角位移的设计响应D-Response-3:第二个载荷工况下节点2沿X轴的角位移。
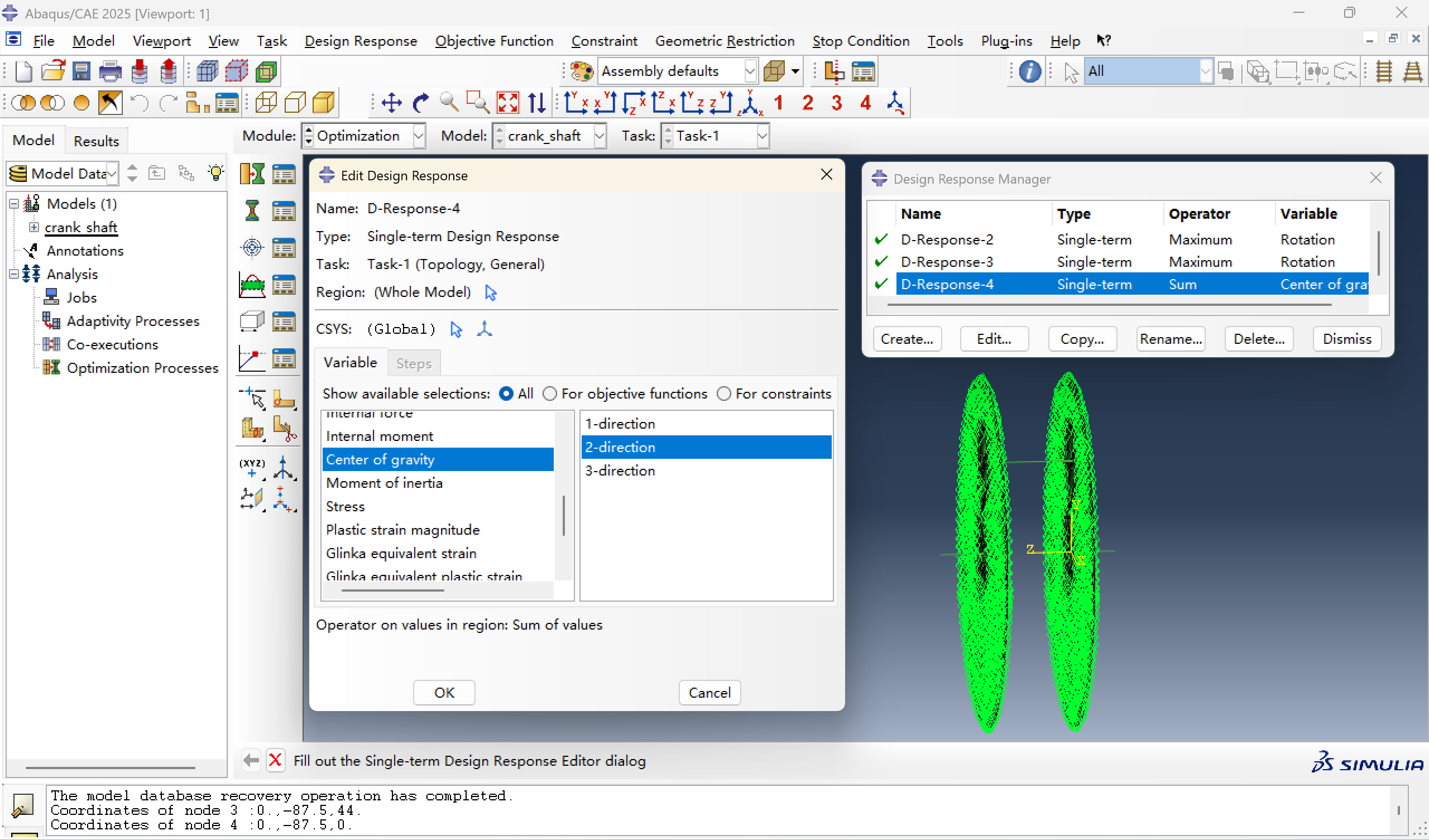
- 定义整个模型在Y轴方向的重心的设计响应D-Response-4。
3、创建目标函数
最小化模型的体积总和响应D-Response-1作为优化目标Objective-1

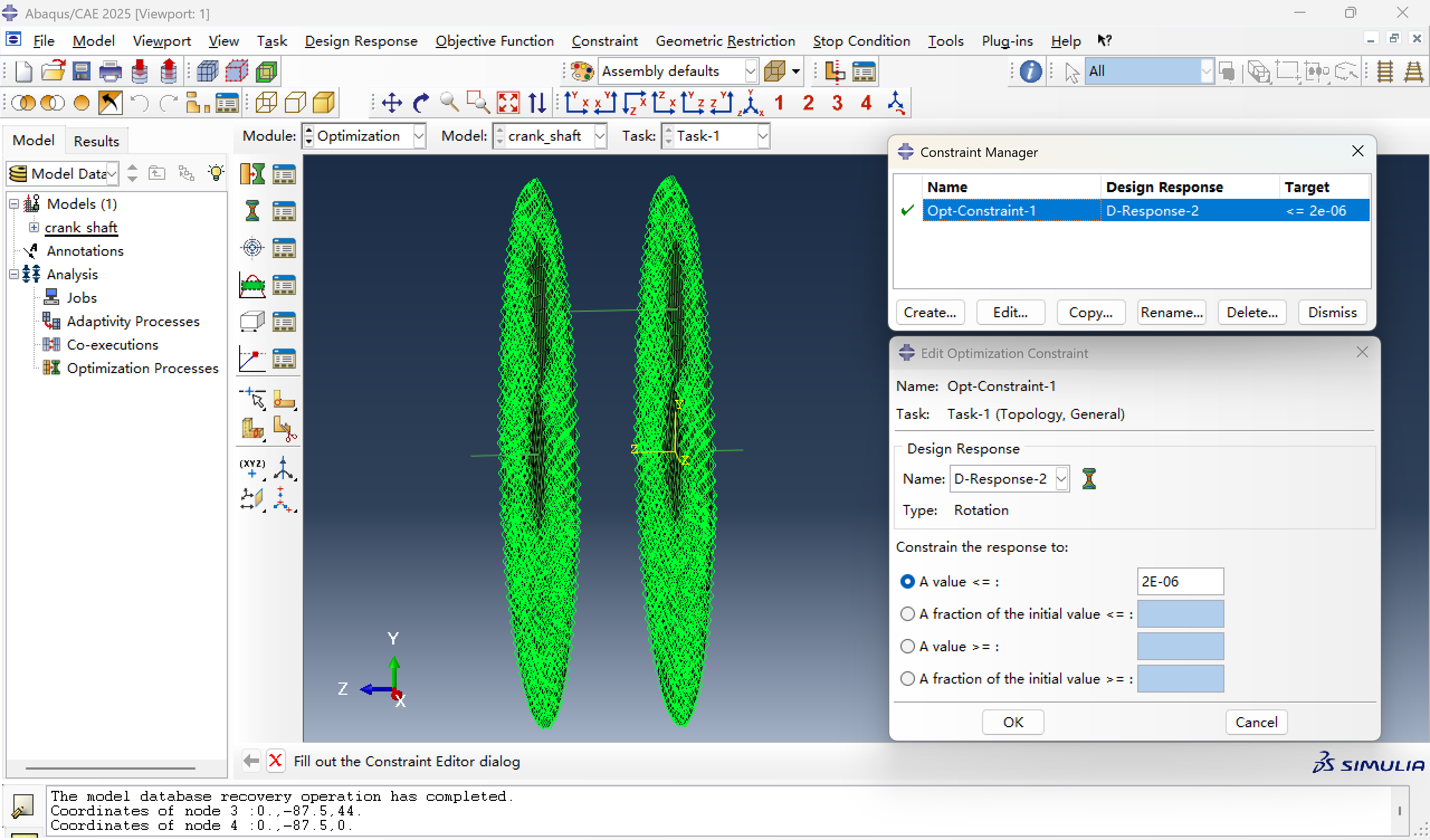
4、创建约束
限制设计响应D-Response-2:第一个载荷工况下节点2沿Z轴的角位移≤2E-06。
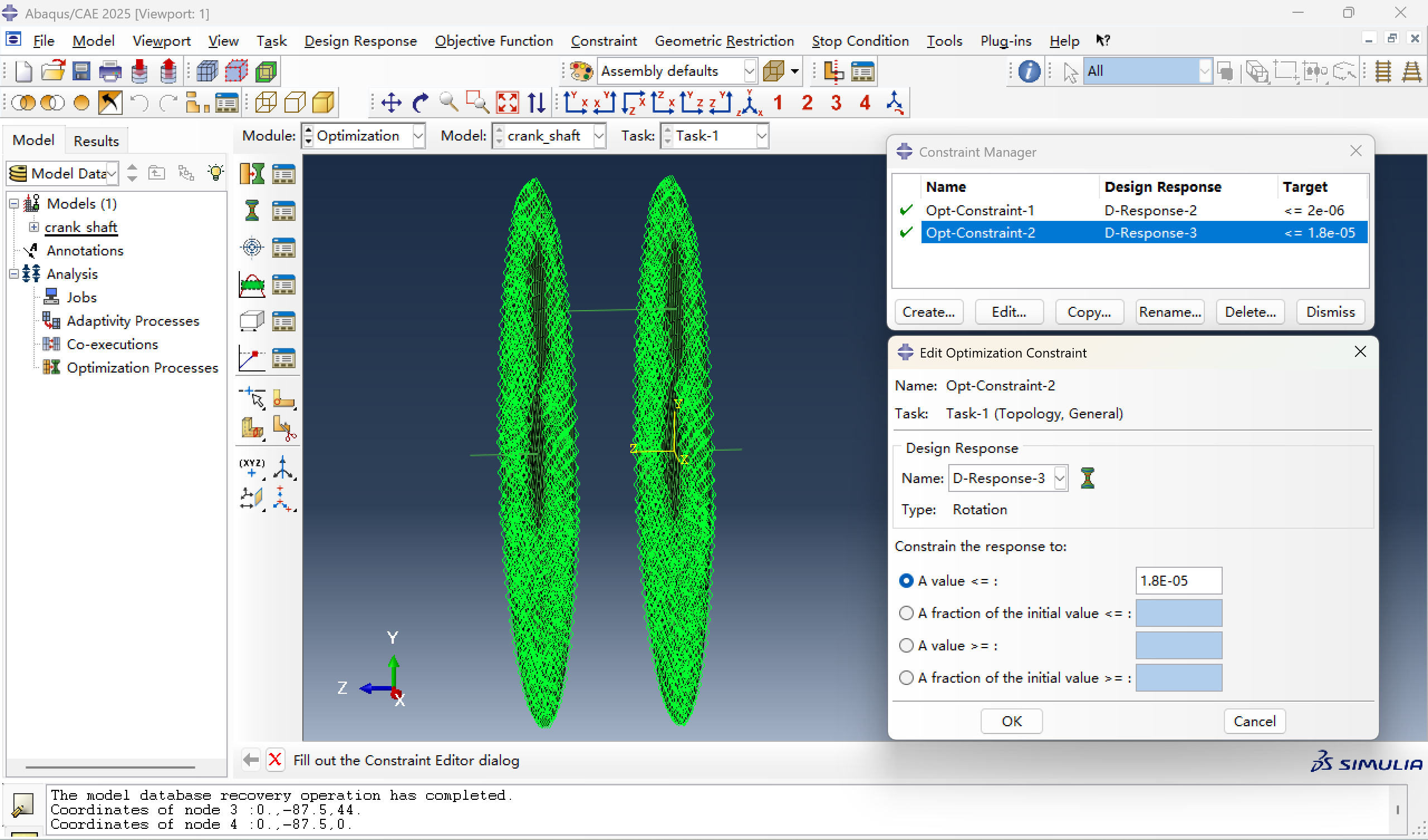
限制设计响应D-Response-3:第二个载荷工况下节点2沿X轴的角位移≤1.8e-5。
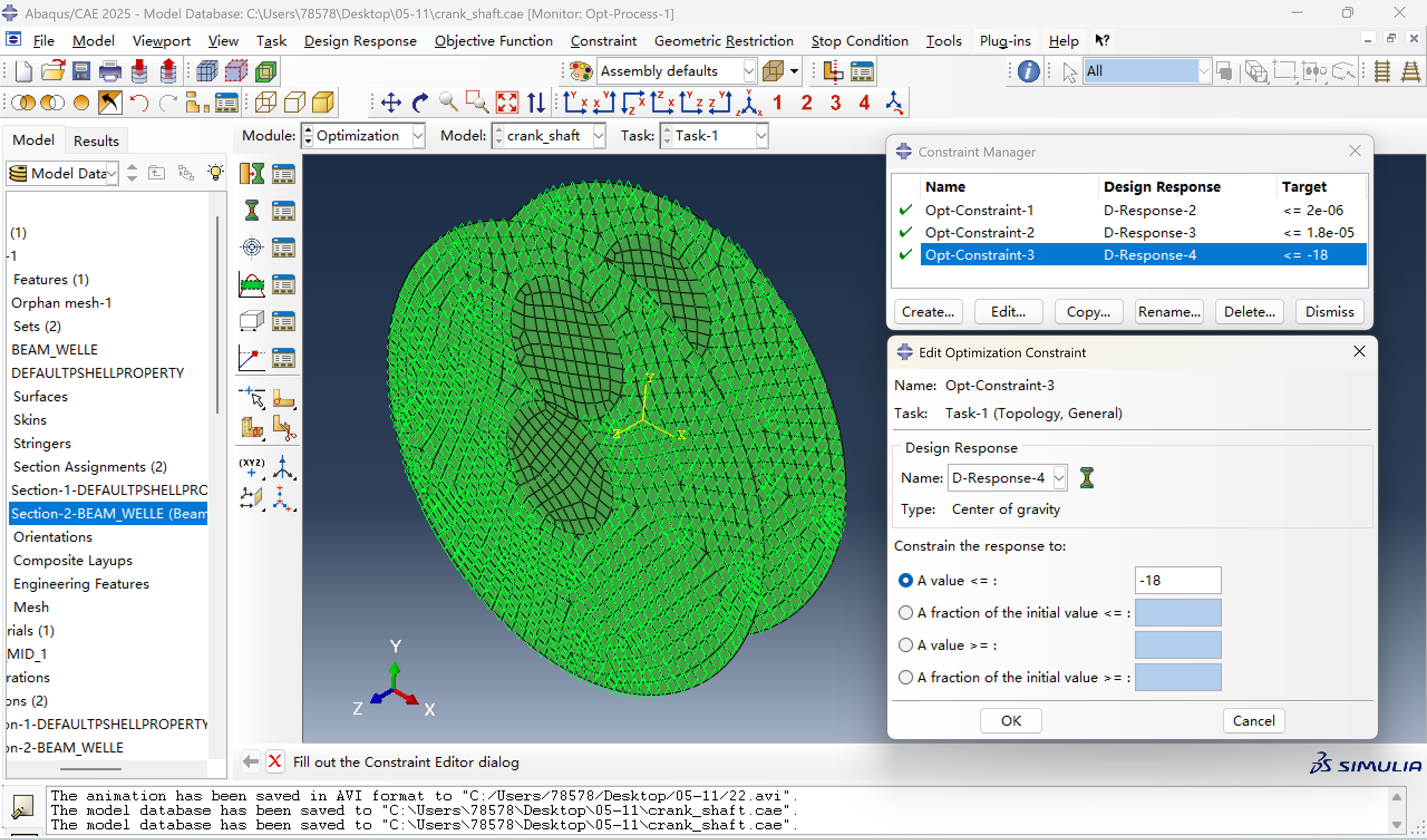
限制设计响应D-Response-4:整个模型在Y轴方向的重心≤-18。
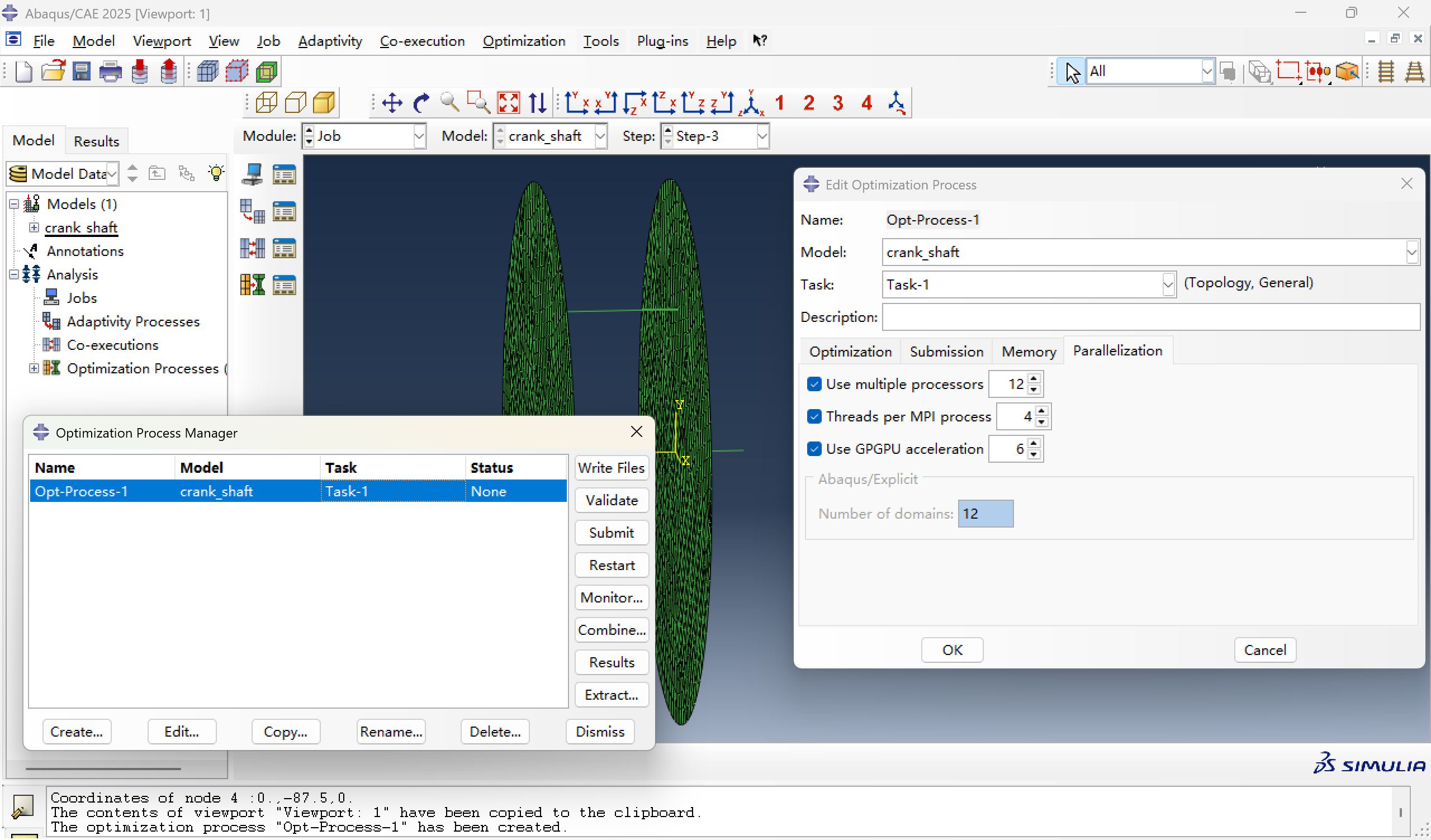
5、创建并提交优化进程
在JOB模块,创建优化进程Opt-Process-1。
6、优化结果