基本信息
题目:II-NVM: Enhancing Map Accuracy and Consistency With Normal Vector-Assisted Mapping
来源:IEEE Robotics and Automation Letters, Vol. 10, No. 6, June 2025
作者:Chengwei Zhao, Yixuan Li, Yina Jian, Jie Xu, Linji Wang, Yongxin Ma, Xinglai Jin
关键词:SLAM、LiDAR-Inertial Odometry、Indoor Mapping、Double-sided Mapping Issue、Normal Vector-Assisted Mapping、Voxel Map
是否开源:https://github.com/chengwei0427/II-NVM,并基于作者的 CT-LIO 项目集成验证。论文还声称公开了首个专门面向"双面建图问题"的仿真与真实数据集。
摘要:这篇论文针对室内 LiDAR SLAM 中非常典型但容易被忽略的 double-sided mapping issue(双面建图问题) ,提出了 II-NVM 方法。其核心思想是:在点云配准、体素地图更新和数据关联过程中显式引入 法向量一致性约束 ,避免将墙体、门、玻璃、薄隔断等正反两侧的点云错误匹配为同一平面,从而提升室内建图的几何一致性和地图精度。论文主要提出了三个技术模块:自适应半径 KD-tree 法向量估计、带前后面存储的法向量体素地图、基于 LRU 的增量式地图管理。实验在 Gazebo 仿真和真实室内场景中验证,结果表明该方法能够更好地恢复墙体厚度,并在多墙体室内环境中获得更低的轨迹误差。
Introduction
研究背景
SLAM 系统的核心任务是在未知环境中同时完成定位与建图。对于室内机器人、建筑数字化、设施巡检、室内导航等应用而言,地图不仅需要有较高的定位精度,还需要保持良好的结构一致性。论文指出,室内环境和室外道路环境不同,室内存在大量薄墙、门、窗、玻璃、隔断等结构,这些结构在 LiDAR 点云中经常表现为距离非常接近的两组平面点。
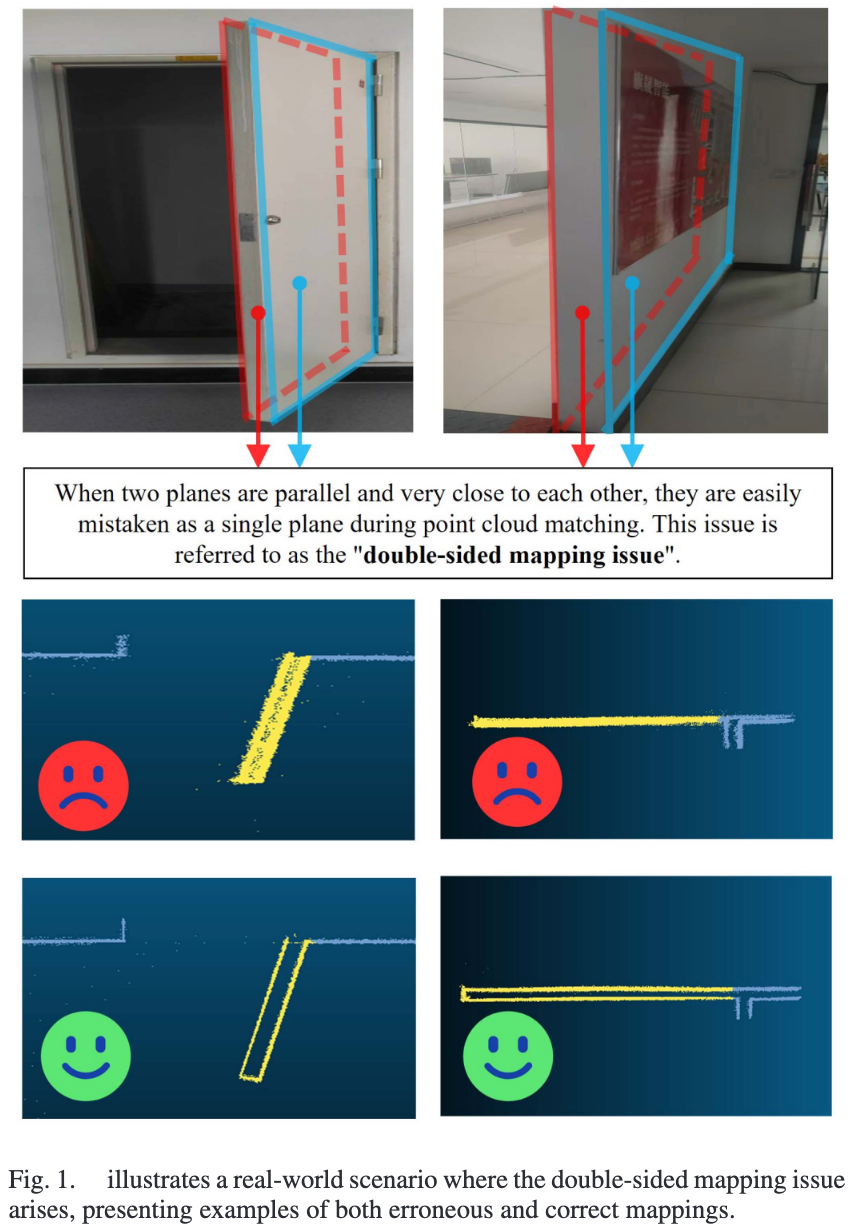
传统 LIO 方法通常依赖点到平面残差或局部几何特征进行数据关联。当两个相邻平面距离较近时,系统可能会把墙体正反两侧的点误认为来自同一个平面,从而出现错误匹配。这个问题在论文中被称为 double-sided mapping issue。从论文第 2 页图 1 可以看到,错误建图时,两侧墙面被压缩或融合为一层;正确建图时,两侧墙面应当被区分为两个独立表面。
研究问题与目标
这篇论文要解决的问题可以概括为:
在室内薄墙、门、窗等双面结构场景中,如何避免 LiDAR SLAM 将正反两侧表面错误匹配为单一平面?
为了解决这个问题,作者没有从闭环检测、全局优化或语义理解入手,而是从点云局部几何出发,引入了一个更直接的判别信息:法向量方向。
其基本判断逻辑是:
如果两个点空间距离很近,但法向量方向不一致,尤其是接近相反,那么它们很可能来自墙体的正反两侧,不应当作为同一平面的近邻点参与点到平面残差构造。
主要贡献
论文列出的贡献主要包括三点:
-
扩展体素地图结构
每个 voxel block 不仅存储点云坐标,还存储法向量信息,并区分前侧和后侧数据。这样同一个体素中可以保存来自物体正反两侧的点,而不是粗暴融合为一个平面。
-
提出自适应半径 KD-tree 法向量估计方法
针对不同距离下点云密度变化的问题,搜索半径根据当前点到 LiDAR 的扫描距离动态变化。远处点云稀疏时使用更大邻域,近处点云密集时使用更小邻域,从而提高法向量估计稳定性。
-
公开面向双面建图问题的数据集和代码
论文在仿真和真实场景中进行了验证,并声称开源了首个专门针对 double-sided mapping issue 的仿真与真实数据集,为后续研究提供了评测基准。
分析:
-
问题聚焦非常明确:论文并不是泛泛地提升 LIO 精度,而是针对室内薄结构场景中的一个具体误匹配问题。
-
技术路线比较工程化:不依赖复杂深度网络,也不需要语义标签,而是基于点云法向量和体素地图结构改造实现。
-
贡献更偏系统增强:II-NVM 可以看作对现有 LIO / voxel map 框架的一种局部几何一致性增强模块。
Related Work
论文将相关工作分为三类:传统 LIO 建图方法、基于 voxel map 的建图方法、基于法向量的 SLAM 方法。
Traditional LIO Mapping Algorithm
论文提到了 LOAM、FAST-LIO、I2EKF-LO、M-DIVO、SuMa、LIPS 等方法。传统 LIO 方法通常通过点线、点面、平面等几何约束完成位姿估计和地图构建。FAST-LIO2 这类方法在实时性和精度上已经非常强,但在室内双面结构中,单纯依赖空间近邻和点到平面残差仍可能出现错误关联。
分析:
传统 LIO 的问题不是不能建图,而是它们默认"空间近的点更可能属于同一表面"。这个假设在室外道路、建筑外立面等场景中通常成立,但在室内薄墙场景中会失效。因为墙体两侧距离可能只有几厘米到十几厘米,恰好落入最近邻搜索或 voxel 邻域范围内。
Voxel Map-Based Mapping Method
论文讨论了 Faster-LIO、VoxelMap、CT-ICP 等基于体素地图的数据管理方法。这类方法通过稀疏 voxel hash 或自适应 voxel 来提高点云存储、更新和查询效率。
但是,传统 voxel map 主要关注空间索引效率,并不显式区分同一个 voxel 内来自不同视角或不同面的点。当墙体两侧点落入相同或相邻 voxel 时,系统可能会把它们混合管理,进而影响后续数据关联。
II-NVM 的改进点在于:voxel 不再只是空间容器,而是带有 法向量方向分布和前后面结构 的局部几何单元。
Normal Vector-Based SLAM Algorithm
论文还讨论了 LiDAR SLAM with Plane Adjustment、LOG-LIO、NV-LIO / NV-LIOM 等利用法向量的工作。已有方法已经注意到法向量对点云配准的重要性,但作者认为这些方法对法向量的利用和管理仍不充分。例如 LOG-LIO 主要将法向量用于视场检查,NV-LIOM 虽然存储点法向量,但在子图构建和法向量一致性维护方面仍存在不足。
分析:
II-NVM 的定位并不是"首次使用法向量",而是将法向量系统性嵌入三个关键环节:
-
法向量估计;
-
voxel map 存储与更新;
-
最近邻搜索与数据关联。
也就是说,它强调的是 normal vector-assisted mapping,而不仅是 normal vector-assisted registration。
Method
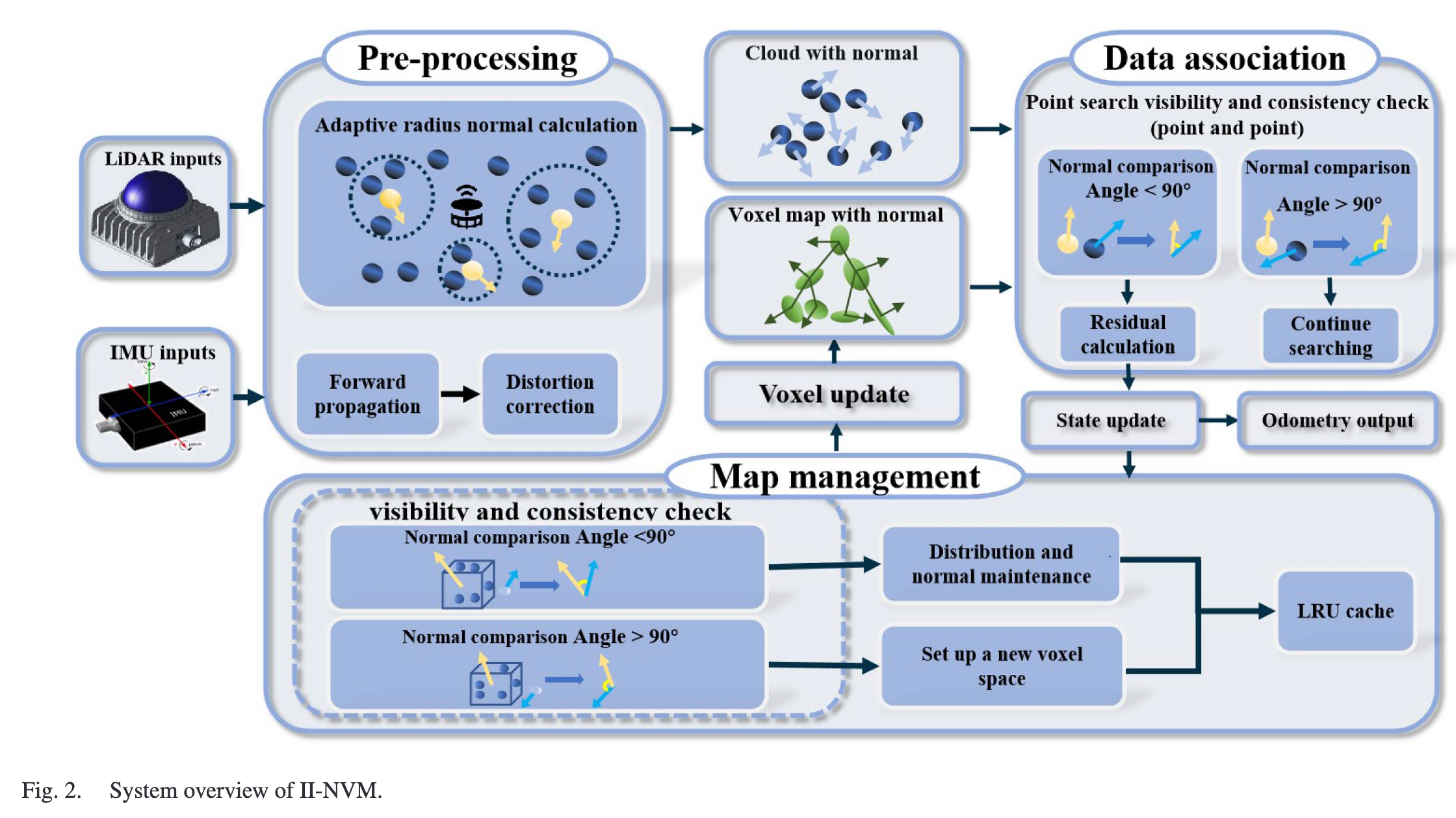
论文第 3 页图 2 给出了 II-NVM 的整体流程。系统输入为 LiDAR 和 IMU 数据,经过预处理、运动畸变校正、法向量计算后,构建带法向量的点云;随后进入带法向量的 voxel map 更新;在数据关联阶段,通过法向量一致性判断筛选合法邻近点,并构造点到平面残差用于状态更新。
整体 pipeline 可以理解为:
LiDAR / IMU 输入
↓
预处理 + 畸变校正
↓
自适应半径法向量估计
↓
带 normal 的点云
↓
NVM voxel map 更新
↓
基于法向量一致性的数据关联
↓
点到平面残差构造
↓
状态估计与里程计输出1. 数据预处理与自适应半径法向量计算
传统法向量估计通常采用固定半径邻域搜索,然后通过邻域点协方差矩阵特征值分解估计局部平面法向量。但在 LiDAR 点云中,点密度与扫描距离强相关:近处点密集,远处点稀疏。如果固定搜索半径过小,远处点邻域不足;如果半径过大,近处边缘、角点、薄墙附近容易混入其他结构点。
因此,论文提出距离自适应搜索半径:
r = (Dscan - Dmin) / (Dmax - Dmin) × (Rmax - Rmin)其中,Dscan 是当前点到传感器的距离,Rmax 和 Rmin 是最大、最小搜索半径,Dmax 和 Dmin 是最大、最小扫描距离。
这个设计的直觉是:
-
近距离:点云密度高,用较小邻域即可估计局部平面;
-
远距离:点云稀疏,需要扩大邻域才能获得稳定法向量;
-
边缘区域:通过邻域点数阈值和局部平面性指标剔除异常点。
论文还使用了两个 outlier 筛选标准:
-
邻域点数不足时认为当前点不可靠;
-
根据协方差矩阵特征值计算平面性指标,如果超过阈值则认为当前点不是稳定平面点。
分析:
这一部分的创新不算复杂,但非常实用。法向量估计质量直接决定后面"正反面判断"的可靠性。如果法向量本身噪声很大,那么所谓的法向量一致性约束就可能误伤正常匹配。因此,作者先解决了法向量估计的尺度适应问题,再将其用于地图管理和数据关联。
2. Incremental Voxel Map
II-NVM 的核心在于扩展 voxel map。传统 voxel block 主要存储点坐标,而 II-NVM 的 voxel block 同时存储点坐标和法向量,并且将一个 voxel 内的数据划分为 front side 和 back side。
2.1 Intra-Voxel View Consistency Judgment
当一个新点要插入某个 voxel 时,系统先判断该点法向量与当前 voxel 中已有数据的主法向量方向是否一致。
具体流程可以理解为:
-
如果当前 voxel 中已有表面数据,则统计已有点的法向量分布;
-
通过协方差分解得到该 voxel 内法向量的主方向;
-
计算新点法向量与主方向之间的夹角;
-
如果夹角小于阈值,例如 90° 左右,则认为属于同一侧表面;
-
如果夹角大于阈值,则认为该点来自相反视角或背面,将其存入 back side。
论文特别说明,阈值经验设置在 90°±10° 范围内,实验鲁棒性不会受到明显影响。
2.2 NVM Voxel Map Management
点云进入全局地图前,系统先根据当前位姿将点和法向量从 LiDAR 坐标系变换到全局坐标系:
Pwi = T Pli
nwi = R nli其中 Pwi 和 nwi 是全局坐标下的位置和法向量,Pli 和 nli 是 LiDAR 局部坐标下的位置和法向量。随后根据点的全局坐标和 voxel 分辨率计算 voxel index。
当对应 voxel 不存在时,初始化 voxel 并插入点;当 voxel 已存在时,进行法向量视角一致性判断:
-
一致:更新到 voxel 的 front region;
-
不一致:更新到 voxel 的 back region;
-
不重置 voxel,也不简单融合两侧点云。
分析:
这是论文最重要的结构性创新。它本质上是在 voxel map 中引入了"局部双层表面"表示。对于普通 voxel map 来说,一个 voxel 是一个空间格子;对于 II-NVM 来说,一个 voxel 更像是一个带方向属性的局部表面容器。
这种设计尤其适合室内薄结构:
-
薄墙两侧可能落在同一个 voxel 或相邻 voxel;
-
两侧点云空间距离近,但法向量方向相反;
-
通过 front / back 存储,可以避免两侧点云被错误融合。
3. LRU-Based Incremental Voxel Map Update
SLAM 系统在长时间运行时会产生大量点云数据。如果 voxel map 只增不减,内存和查询代价都会增加。II-NVM 引入 LRU cache 策略管理 voxel block。
LRU 的思想是:如果某个 voxel 很久没有被访问或更新,则认为它对当前局部建图的重要性较低,在存储资源紧张时优先替换或释放。这样可以把计算和存储资源集中在最近活跃区域。
分析:
LRU 本身不是新算法,但它和 NVM voxel map 结合后具有工程意义。因为 II-NVM 的 voxel 存储了更多信息,包括点坐标、法向量、front / back 区域,因此单个 voxel 的存储负担比普通 voxel 更高。LRU 可以缓解这种结构增强带来的内存压力,使系统仍能保持实时性。
4. NVM-Based State Estimation
论文将 NVM 模块集成到 CT-LIO 中进行验证。数据关联时,系统将当前点变换到全局坐标系,计算其 voxel index,并搜索当前 voxel 及其 26 个邻近 voxel。
与传统最近邻搜索不同,II-NVM 不仅检查距离,还检查法向量夹角:
-
如果两个点距离近,且法向量夹角小于阈值,则认为它们来自同一表面;
-
如果距离近但法向量方向不一致,则跳过该邻近点,继续搜索;
-
只有满足法向量一致性的邻近点才用于构造点到平面残差。
论文第 5 页图 3 很直观地展示了这个过程:当 LiDAR 穿过墙体扫描时,两面墙可能因为距离很近而被误认为同一平面;加入法向量一致性判断后,可以避免这种错误匹配。
分析:
这里的关键不是新增一种复杂残差,而是在构造残差之前做了更严格的数据关联筛选。传统 SLAM 中,错误关联往往比优化器本身更致命。II-NVM 通过法向量一致性减少错误约束,进而提升状态估计和地图一致性。
Experiments
论文实验包括 Gazebo 仿真场景、真实室内场景、墙厚恢复评估和运行时间评估。
1. 数据集与实验环境
论文指出,双面建图问题比较难用传统 end-to-end SLAM 指标直接评价。原因有两个:
-
一些 SLAM 方法即使轨迹误差较小,也可能没有正确解决双面墙问题;
-
真实室内多房间场景很难获得精确 ground truth,传统 motion capture 难以覆盖大范围复杂空间。
因此,论文采用两类评估方式:
-
在 Gazebo 仿真中使用 ground truth 轨迹计算 ATE;
-
在真实室内场景中使用墙体厚度作为替代评价指标。
这点比较合理。因为 double-sided mapping issue 的本质是地图几何结构错误,不一定完全反映在轨迹误差上。用墙厚恢复精度作为指标,更能直接评价该问题是否被解决。
2. Gazebo 仿真轨迹精度评估
论文构建了包含不同墙厚、房间、咖啡厅、车库等场景的 Gazebo 仿真数据集,并使用 Livox 和 Velodyne 两类 LiDAR 进行实验。表 I 给出了不同数据序列的 LiDAR 类型、采集时长、轨迹长度和位姿数量。
实验对比方法包括:
-
II-NVM;
-
CT-LIO;
-
II-NVM 固定 1m 半径版本;
-
FAST-LIO2;
-
IG-LIO;
-
DLO;
-
LOG-LIO;
-
NV-LIOM 等。
从论文第 6 页表 II 和表 III 可以看到,在 Livox 和 Velodyne 数据上,II-NVM 多数情况下取得最低 ATE。论文还通过 CT-LIO 和固定半径版本 II-NVM(1m) 做消融实验,说明法向量一致性检查和自适应半径 KD-tree 都对结果有贡献。
分析:
这组实验说明 II-NVM 不只是改善地图视觉效果,也会影响位姿估计。原因在于:如果错误地把墙体两侧点作为同一平面约束,优化器会受到错误残差拉扯,从而导致轨迹偏移。II-NVM 过滤掉这类错误约束后,轨迹估计更稳定。
3. 墙体厚度评估
这是论文中最能体现问题针对性的实验。
对于真实室内数据,作者从构建后的点云地图中提取双面区域,通过平面拟合得到墙体一侧的平面方程,再计算另一侧点到该平面的平均距离,将其作为估计墙厚。
论文第 7 页表 IV 给出了真实场景中不同墙体区域的墙厚恢复结果。对于较厚目标,例如 15 cm 和 13 cm 左右的墙体,误差可以控制在较低水平;对于 3 cm、4 cm 这类极薄目标,误差相对增大,但仍保持在可接受范围内。
论文第 7 页表 V 给出了仿真场景中不同墙厚的结果。仿真环境可以精确控制墙体几何和厚度,因此更适合验证方法在不同厚度条件下的适应性。整体结果显示 II-NVM 在多数墙厚下能够较准确地恢复双面结构。
分析:
墙厚评估比单纯 ATE 更有说服力。因为 II-NVM 的目标不是单纯优化轨迹,而是恢复正确的室内几何结构。如果一个 SLAM 方法轨迹看起来还可以,但墙体被压扁、融合、重影,那么它在建筑测绘、室内数字孪生、机器人导航中的实用价值会受到影响。
4. 运行时间评估
论文第 8 页表 VI 比较了带 LRU cache 和不带 LRU cache 的运行效率。结果显示,引入 LRU 后,地图更新、状态估计、位姿优化和测量处理等主要操作的耗时均有所降低。
分析:
这说明 II-NVM 的额外几何信息并没有导致系统不可实时运行。相反,通过合理的缓存管理,系统在增强地图表达能力的同时保持了较好的效率。
不过需要注意,论文中的效率评估主要是在作者设定的实验平台和数据规模下完成的。对于更大规模建筑、长时间巡检任务、多楼层环境,LRU 策略是否会造成旧区域细节丢失或影响回环后的地图一致性,仍需要进一步验证。
创新点与技术亮点
1. 将 double-sided mapping issue 作为明确研究对象
这篇论文最大的亮点不是提出了一个全新的 SLAM 框架,而是精准抓住了室内建图中的一个具体痛点:薄结构正反两侧被错误融合。
很多 LIO 论文更关注轨迹误差、退化场景、实时性、回环优化等指标,而 II-NVM 关注的是地图结构正确性。对于室内场景来说,这一点非常重要。因为室内机器人不仅需要知道"自己在哪里",还需要知道"墙在哪里、门在哪里、通道边界在哪里"。
2. 法向量一致性贯穿建图全过程
已有方法也使用法向量,但 II-NVM 的特点是将法向量贯穿多个模块:
-
法向量估计阶段:使用自适应半径提高法向量质量;
-
voxel map 阶段:存储点和法向量,并区分 front / back;
-
数据关联阶段:用法向量夹角过滤错误邻近点;
-
状态估计阶段:只用几何一致的邻近点构造点到平面残差。
这比单纯在配准阶段加入法向量权重更系统。
3. 扩展 voxel map 表达能力
传统 voxel map 的核心目标是加速索引和节省存储。II-NVM 进一步让 voxel map 具备"表面方向感知能力"。也就是说,voxel 不再只是一个空间哈希桶,而是局部几何结构的表达单元。
这种思路值得借鉴。对于 SLAM 系统来说,地图数据结构不仅影响效率,也直接影响数据关联质量。如果地图结构不能表达真实几何,优化器再强也可能被错误关联拖垮。
4. 自适应半径法向量估计具有较强工程实用性
固定半径邻域是很多点云处理方法的默认选择,但在 LiDAR 数据中,点密度随距离变化非常明显。II-NVM 根据扫描距离调整搜索半径,是一个简单但有效的工程设计。
这类设计对其他点云任务也有借鉴意义,例如:
-
点云法向量估计;
-
局部平面提取;
-
点云分割;
-
地图语义标注;
-
ICP / GICP 数据关联。
5. 评价指标设计贴合问题本身
论文没有只用 ATE 评价系统,而是额外提出墙体厚度恢复指标。这一点非常值得学习。
对于一个面向特定问题的 SLAM 方法,评价指标应当服务于问题本身。II-NVM 解决的是双面墙错误融合问题,那么墙厚恢复精度就是比轨迹误差更直接的指标。
值得借鉴的地方
1. 从具体失败案例出发定义研究问题
这篇论文的问题动机非常清晰:室内薄墙、门、窗等结构容易造成双面建图错误。作者没有抽象地说"提高室内 SLAM 精度",而是用一个具体 failure case 组织整篇文章。
写 SLAM 或机器人论文时,这种方式很值得借鉴:
先指出现有系统在哪类场景失败
再解释失败原因
再提出针对性机制
最后用专门设计的指标证明问题被解决这比泛泛地做一个"更准、更快、更鲁棒"的系统更容易形成论文贡献点。
2. 数据结构创新比单纯优化残差更重要
很多 SLAM 改进集中在优化器、滤波器或残差函数上,但 II-NVM 说明:地图数据结构本身也可以成为创新点。
如果地图结构中没有保存法向量和正反面信息,那么后续数据关联只能基于距离或局部平面,天然容易出错。II-NVM 通过改变 voxel 的存储内容和更新逻辑,从源头减少错误关联。
3. 几何先验可以有效提升系统鲁棒性
II-NVM 使用的不是学习模型,而是简单的几何先验:同一表面的法向量应当方向一致;墙体正反两侧法向量方向不同。这个先验非常符合室内结构特点。
这说明在机器人建图任务中,合理的几何约束仍然非常有价值,尤其是在数据量有限、场景结构明显、实时性要求高的系统中。
4. 消融实验设计比较清楚
论文通过 CT-LIO、II-NVM(1m) 和完整 II-NVM 对比,分别说明:
-
仅有原始 CT-LIO 不足以解决双面建图;
-
固定半径法向量估计不如自适应半径;
-
法向量一致性检查对最终轨迹和地图都有帮助。
这类消融设计值得参考。一个系统方法如果包含多个模块,必须说明每个模块到底贡献了什么。
5. 问题导向的数据集建设
论文声称构建并公开了第一个专门面向 double-sided mapping issue 的仿真和真实数据集。这个贡献虽然看起来不如算法模块"技术性强",但对领域推进很重要。
很多 SLAM 问题难以被重视,是因为缺少专门 benchmark。II-NVM 通过数据集把问题标准化,有利于后续方法在同一问题上比较。
局限性分析
1. 法向量估计本身对噪声和局部结构敏感
II-NVM 的核心判断依赖法向量。如果法向量估计错误,后续 front / back 判断和数据关联都会受影响。
在以下场景中,法向量可能不稳定:
-
玻璃、镜面、多路径反射严重区域;
-
点云极度稀疏区域;
-
墙角、门框、桌椅边缘等非平面区域;
-
动态物体附近;
-
低线数或视场较窄的 LiDAR。
论文虽然使用邻域点数和平面性指标过滤 outlier,但这并不能完全解决复杂真实环境中的法向量不稳定问题。
2. 方法主要针对平面双面结构,泛化范围有限
II-NVM 的问题设定高度依赖"正反两侧平面"的结构假设。它非常适合墙体、门、窗、薄隔断等室内结构,但对于非平面、曲面、复杂家具、开放空间中的稀疏结构,其优势可能不明显。
换句话说,这不是一个通用场景理解方法,而是一个针对室内薄平面结构的 SLAM 增强模块。
3. 阈值仍然依赖经验设置
论文中法向量夹角阈值采用 90°±10°,并声称小范围变化不影响实验鲁棒性。 但在不同 LiDAR、不同 voxel 分辨率、不同点云噪声水平下,阈值是否仍然适用,需要更多验证。
例如:
-
voxel 太大时,可能混入多个结构面;
-
voxel 太小时,front / back 统计不足;
-
法向量噪声大时,90° 阈值可能过于粗糙;
-
对于斜墙、曲面或非正交结构,固定阈值可能误判。
后续可以考虑自适应阈值或基于不确定性的法向量一致性判断。
4. 与回环、全局优化、多楼层长期建图的关系不充分
论文主要关注局部建图和里程计性能,对回环检测、全局 pose graph 优化、多楼层长期地图维护讨论较少。
如果系统在大规模建筑中长期运行,可能出现以下问题:
-
LRU 删除旧 voxel 后,回到旧区域如何恢复一致地图?
-
回环优化后,全局位姿发生变化,已存储 voxel 的法向量和 front / back 结构如何更新?
-
多次经过同一墙体正反两侧时,是否会产生重复层或历史不一致?
-
长期动态变化环境中,门开关、家具移动会不会破坏法向量一致性假设?
这些问题在真实工程部署中比较关键。
5. 实验对比仍有进一步扩展空间
论文已经对比了 FAST-LIO2、CT-LIO、LOG-LIO、NV-LIOM、DLO 等方法,并做了墙厚评估。但仍有一些可以加强的地方:
-
可以增加更多真实大规模建筑场景;
-
可以测试不同 LiDAR 线数、不同噪声模型下的鲁棒性;
-
可以加入运行内存占用对比;
-
可以分析不同 voxel size、搜索半径、夹角阈值对结果的影响;
-
可以与带语义分割或结构化平面建图的方法比较。
目前实验已经能证明方法有效,但对极端场景和长期运行的验证还不够充分。
总结
II-NVM 是一篇问题导向非常明确的 SLAM 论文。它针对室内场景中常见的 double-sided mapping issue,提出了基于法向量一致性的建图增强方法。其核心思想是:空间距离近并不一定代表属于同一表面,尤其在薄墙、门、窗等结构中,必须引入法向量方向来区分正反两侧。
方法上,II-NVM 主要包含三个模块:
-
自适应半径 KD-tree 法向量估计;
-
带 front / back 双侧存储的 normal vector voxel map;
-
基于法向量一致性的数据关联与点到平面残差构造。
实验表明,该方法能够提升室内多墙体环境下的轨迹估计精度,并能较好恢复真实和仿真场景中的墙体厚度。同时,LRU cache 的引入保证了系统在增强地图表达能力后仍具备较好的实时性。
从研究价值看,这篇论文的意义不在于提出一个完全替代 FAST-LIO 或 CT-LIO 的新框架,而在于提出了一个可插入现有 LIO 系统的几何一致性增强模块。它提醒我们:在 SLAM 系统中,错误的数据关联往往比优化算法本身更致命;而地图数据结构是否能表达真实几何结构,直接决定了后续匹配和优化的上限。