YOLO26最新创新改进系列:引入 CVPR2026 FAAFusion,普通目标检测获得方向鲁棒性,傅里叶主方向估计与特征对齐机制用于特征增强,创新性强!
YOLO26 改进 | 引入 CVPR2026 FAAFusion(Fourier Angle Alignment)到 Backbone、Neck、Head 三类网络改进!
本文基于
ultralytics26-main8,将 CVPR2026Fourier Angle Alignment for Oriented Object Detection in Remote Sensing中的 FAAFusion / Fourier Angle Alignment 改进思路迁移到 YOLO26 目标检测任务。
1. 论文与代码出处
| 类型 | 链接 |
|---|---|
| arXiv 原文 | https://arxiv.org/abs/2602.23790 |
论文核心思想:
- 旋转目标检测中角度预测容易受周期性、边界不连续等问题影响。
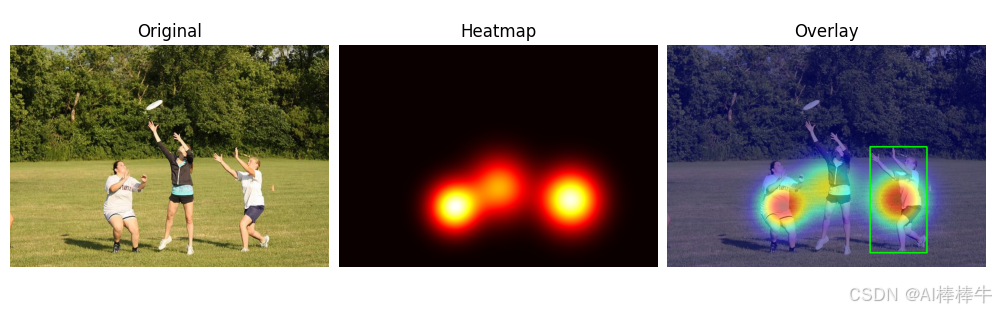
- FAA 使用傅里叶频域特征估计主方向,使特征在方向维度上更加一致。
本文适配策略:
- 保留 YOLO26
Detect,输出为水平框。 - 将傅里叶主方向估计与特征对齐机制用于特征增强。
- 让普通目标检测获得方向鲁棒性,而不改变数据标注格式和损失格式。
2. 网络结构图
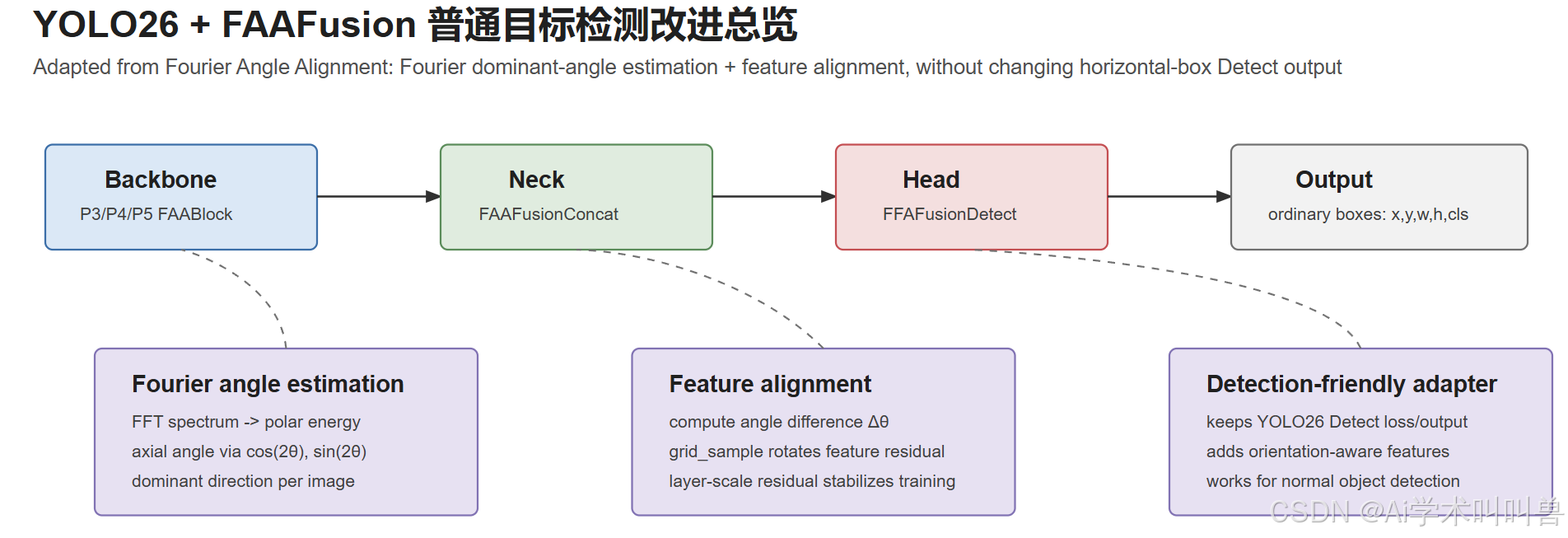
2.1 总览图
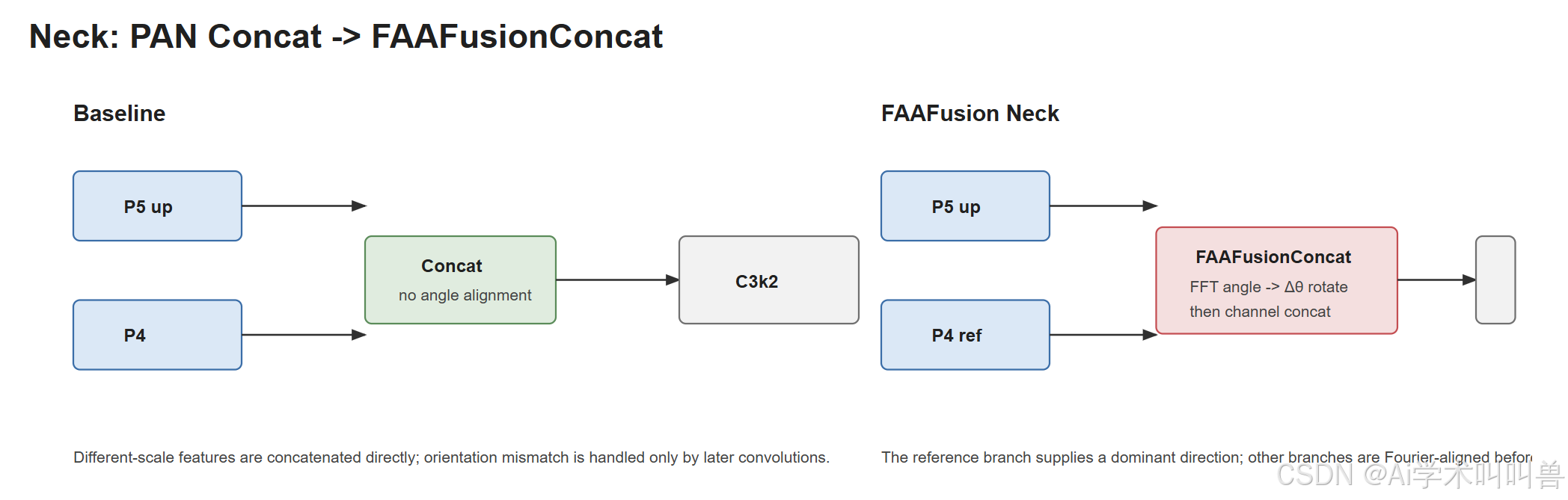
2.2 Neck 对比图
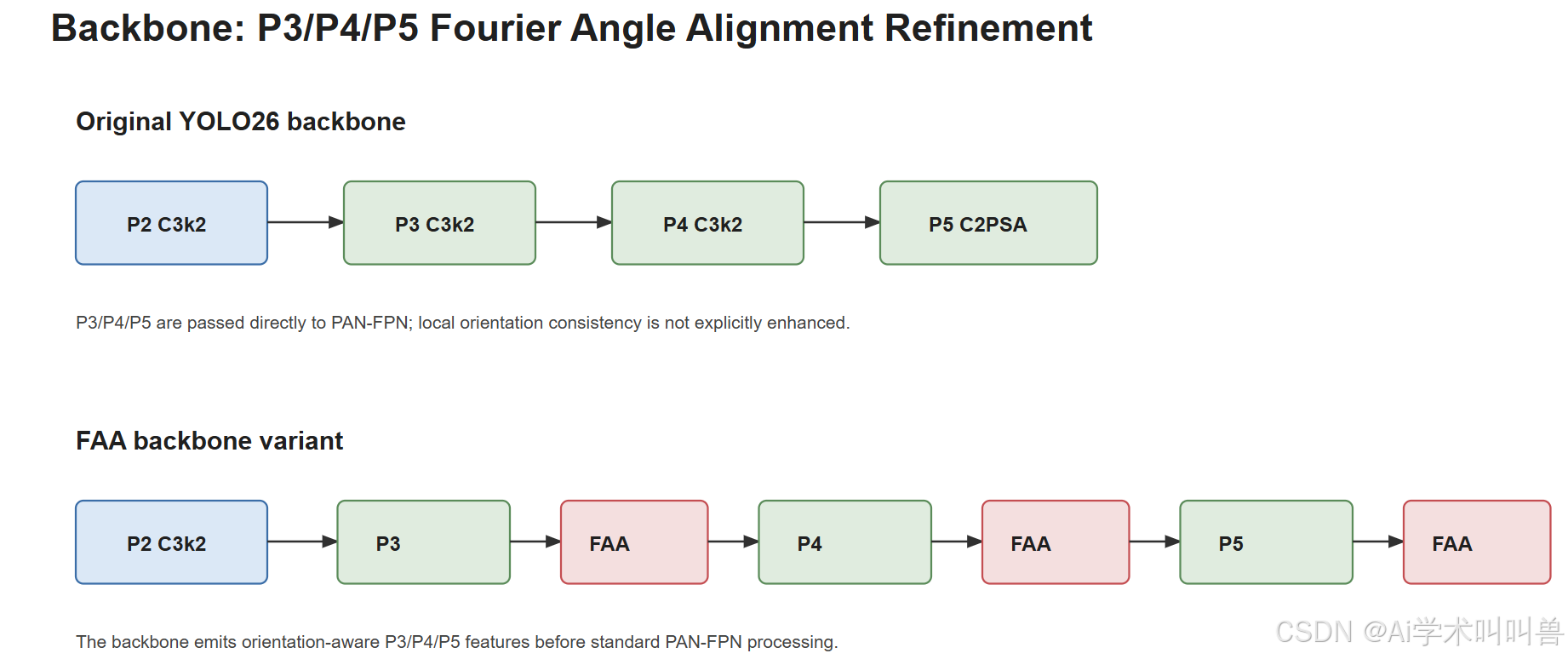
2.3 Backbone 对比图
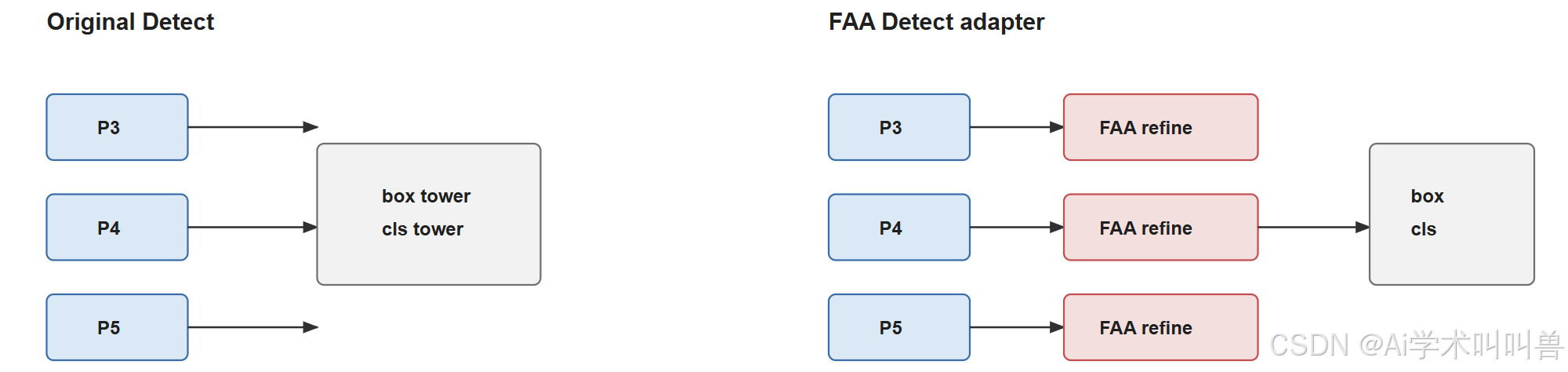
2.4 Head 对比图
3. FAAFusion 原理说明
3.1 傅里叶主方向估计
对于输入特征 x ∈ R(B,C,H,W):
- 先计算特征能量图:
python
energy_map = x.pow(2).mean(1)- 对能量图做二维 FFT:
python
spectrum = abs(fftshift(fft2(energy_map)))- 在频域中使用极坐标角度
θ和频率半径ρ计算主方向:
python
cos2 = Σ spectrum * ρ * cos(2θ)
sin2 = Σ spectrum * ρ * sin(2θ)
angle = 0.5 * atan2(sin2, cos2)这里使用 2θ 是因为方向是轴向的,θ 和 θ + π 表示同一方向。
3.2 特征方向对齐
得到当前特征角度 θ_x 和参考特征角度 θ_ref 后:
python
delta = wrap_pi(theta_ref - theta_x)然后通过 affine_grid + grid_sample 对特征进行轻量旋转对齐。
为了避免训练初期扰动过大,加入可学习残差缩放:
python
out = x + gamma * local_conv(aligned - x)其中 gamma 初始值为 1e-3。
4. 三个模块的具体改进
4.1 Neck 改进:FAAFusionConcat
改动位置
文件:
text
ultralytics/cfg/models/26/yolo26-FFAFusion-Neck.yaml原 YOLO26 Neck 中的四个 PAN 融合节点:
yaml
[[-1, 6], 1, Concat, [1]]
[[-1, 4], 1, Concat, [1]]
[[-1, 13], 1, Concat, [1]]
[[-1, 10], 1, Concat, [1]]替换为:
yaml
[[-1, 6], 1, FFAFusionConcat, [1, 7, 32, 0.001]]
[[-1, 4], 1, FFAFusionConcat, [1, 7, 32, 0.001]]
[[-1, 13], 1, FFAFusionConcat, [1, 7, 32, 0.001]]
[[-1, 10], 1, FFAFusionConcat, [1, 7, 32, 0.001]]参数含义:
| 参数 | 含义 |
|---|---|
1 |
channel 维拼接 |
7 |
FAA 局部对齐卷积核大小 |
32 |
中间通道数 |
0.001 |
残差层缩放初始值 |
Neck 融合前后对比
| 对比项 | 原 YOLO26 Neck | FAAFusion Neck |
|---|---|---|
| 融合方式 | 直接 Concat | 先傅里叶角度对齐,再 Concat |
| 多尺度方向一致性 | 无显式处理 | 显式对齐不同尺度方向 |
| 输出通道数 | sum(ch) |
保持 sum(ch) |
| 对下游结构影响 | 原生 | 下游 C3k2 不需要修改 |
| 优点 | 简单快速 | 更适合方向变化明显、斜向目标、纹理方向强的数据 |
为什么会涨点
Neck 是 YOLO26 多尺度特征融合最核心的位置。普通 Concat 会把不同尺度特征直接堆叠,如果不同尺度对同一目标的方向响应不一致,后续卷积需要额外学习对齐。FAAFusionConcat 在拼接前先做傅里叶角度对齐,可以减少方向错配,提高多尺度特征的一致性。
4.2 Backbone 改进:FFAFusionBlock
改动位置
文件:
text
ultralytics/cfg/models/26/yolo26-FFAFusion-Backbone.yaml新增三处 Backbone 特征增强:
yaml
- [-1, 1, FFAFusionBlock, [512, 7, 32, 0.001, 0.5]] # P3 FAA refinement
- [-1, 1, FFAFusionBlock, [512, 7, 32, 0.001, 0.5]] # P4 FAA refinement
- [-1, 1, FFAFusionBlock, [1024, 7, 32, 0.001, 0.5]] # P5 FAA refinementBackbone 融合前后对比
| 对比项 | 原 YOLO26 Backbone | FAA Backbone |
|---|---|---|
| P3/P4/P5 输出 | 直接送入 Neck | 先做 Fourier Angle Alignment |
| 方向鲁棒性 | 依赖普通卷积学习 | 显式估计主方向并对齐 |
| 训练稳定性 | 原始结构稳定 | 使用 gamma=1e-3 残差缩放 |
| 优点 | 轻量简单 | 提前增强方向一致性,降低 Neck 融合压力 |
为什么可能涨点
Backbone 决定特征金字塔的基础质量。P3 偏细节,P4 偏中尺度结构,P5 偏语义。对这些关键输出做 FAA refinement,可以让送入 Neck 的特征已经具备更好的方向一致性,尤其适合道路、车辆、船舶、遥感建筑等存在明显方向变化的目标。
4.3 Head 改进:FFAFusionDetect
改动位置
文件:
text
ultralytics/cfg/models/26/yolo26-FFAFusion-Head.yaml原检测头:
yaml
- [[16, 19, 22], 1, Detect, [nc]]替换为:
yaml
- [[16, 19, 22], 1, FFAFusionDetect, [nc, 7, 32, 0.001]]Head 融合前后对比
| 对比项 | 原 Detect | FFAFusionDetect |
|---|---|---|
| 检测输出 | 水平框 | 水平框,保持不变 |
| 预测前特征 | 直接进入 box/cls tower | 先做 FAA refinement |
| 损失函数 | 原 YOLO26 Detect | 不改变 |
| 数据格式 | 普通检测数据 | 不改变 |
| 优点 | 稳定 | 局部改动小,预测前增强方向感知 |
为什么可能涨点
Head 直接决定分类置信度和边界框回归质量。FFAFusionDetect 在预测前对 P3/P4/P5 分别做傅里叶角度对齐增强,不改变 YOLO26 的检测输出和损失函数,因此是三种改法里最局部、最容易做消融的一种。
5. 写在最后
学术因方向、个人实验和写作能力以及具体创新内容的不同而无法做到一通百通,关注UP:Ai学术叫叫兽
在所有B站资料中留下联系方式以便在科研之余为家人们答疑解惑,本up主获得过国奖,发表多篇SCI,擅长目标检测领域,拥有多项竞赛经历,拥有软件著作权,核心期刊等经历。
因为经历过所以更懂小白的痛苦!
因为经历过所以更具有指向性的指导!
祝所有科研工作者都能够在自己的领域上更上一层楼!
6. 绘图代码资源
以下为给大家庭小伙伴们免费更新的绘图代码,均配有详细教程,超小白也可一键操作! 后续更多提升文章档次的资料的更新请大家庭的小伙伴关注UP:Ai学术叫叫兽!