第 1 章 引言
1.1 为什么需要将 AUTOSAR CP XCP 移植到裸机
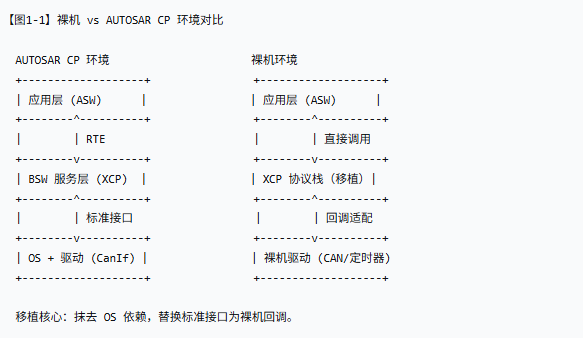
AUTOSAR CP 规范中的 XCP 模块设计精巧、功能完备,但它默认运行在具有操作系统(OS)和复杂基础软件(BSW)的 ECU 上。然而,大量电机控制、BMS、数字电源等产品仍然基于裸机平台开发------没有 RTOS,没有 AUTOSAR BSW 框架,只有中断和主循环。直接使用 AUTOSAR 风格的 XCP 源码会导致依赖缺失、调度错位、资源浪费。因此,将 XCP 协议栈从 AUTOSAR 环境移植到裸机 MCU,是一项具有极高工程价值的工作。
1.2 裸机平台的特点与挑战
裸机环境与 AUTOSAR CP 标准环境相比,存在显著差异:无操作系统、无任务调度表、无标准 BSW 驱动、无运行时环境(RTE)。主要挑战包括:需要自己实现所有底层回调(CAN 驱动、定时器、内存访问);没有任务栈保护,必须极小化中断处理时间;资源受限,必须裁减不必要的 XCP 功能;调度点需适配主循环周期和中断事件。
1.3 本文的目标与范围
本文旨在指导嵌入式开发者从零开始,将一份 AUTOSAR CP 风格的 XCP 协议栈移植到裸机 MCU 上,最终实现:
-
XCP 基础通信(连接、设置地址、上传、下载、获取状态等)
-
静态 DAQ 数据采集(绑定定时器事件,周期性发送 DTO)
全文不涉及具体变量名、函数名,但提供清晰的配置思路、调度设计和适量字符图,读者可直接迁移到任何裸机平台(如 Cortex-M、RISC-V 等)。
第 2 章 移植准备与配置裁剪
2.1 目标裸机平台硬件资源评估
在动手移植之前,必须评估目标平台的硬件资源,确保能够承载一个最小 XCP on CAN 子系统。建议的最低资源为:ROM 8~12 KB(存放 XCP 核心代码),RAM 2~4 KB(存放 FIFO 队列、状态变量等),至少 1 路 CAN 控制器(支持标准帧),一个自由运行定时器(用于生成事件周期)。若资源远高于此,可保留更多功能(如动态 DAQ、安全解锁等);若资源紧张,则需要进一步裁剪。
2.2 源码获取与依赖项识别
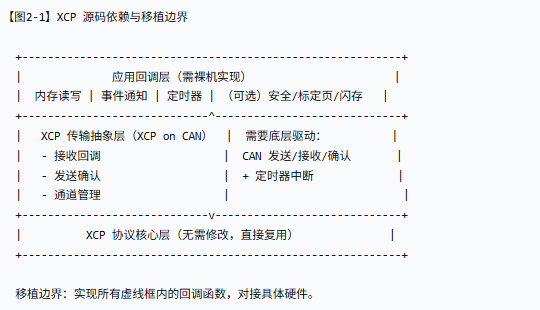
AUTOSAR XCP 源码通常分为三个层次:协议核心层(命令表、状态机、DAQ 引擎、FIFO 管理)、传输抽象层(XCP on CAN,管理 TX/RX 通道、PDU 组装)、应用回调层(内存读写、定时器、安全解锁等)。裸机移植的重点是实现传输抽象层的回调接口 (接收指示、发送确认)和应用回调层的硬件相关函数(内存访问、事件通知)。协议核心层无需修改,直接复用。
2.3 通信传输层裁剪:仅保留 XCP on CAN
AUTOSAR 代码中可能包含 XCP on Ethernet、XCP on FlexRay 等分支。在配置头文件中,必须只定义 CAN 相关的宏(如 XCP_PROTOCOL_CAN),同时取消定义所有以太网、FlexRay 相关宏。此外,需要指定 CAN 的命令 ID(CRO_ID)和数据 ID(DTO_ID),以及经典 CAN 的最大帧长(通常 8 字节)。
2.4 关闭非必要功能
根据裸机资源限制,建议关闭以下高级功能(在配置头文件中用 OFF 宏控制):动态 DAQ(需要堆管理,实时性不确定)、时间戳(需要全局高精度定时器,可后续再加)、标定页切换(需要 Flash 换页机制,多数裸机不用)、闪存编程(风险高,可离线烧录)、Seed & Key 解锁(简化握手流程)、STIM 激励(不常用)。关闭这些功能后,XCP 模块仅保留基础通信和静态 DAQ,代码体积和内存占用大幅下降。
2.5 静态 DAQ 参数配置
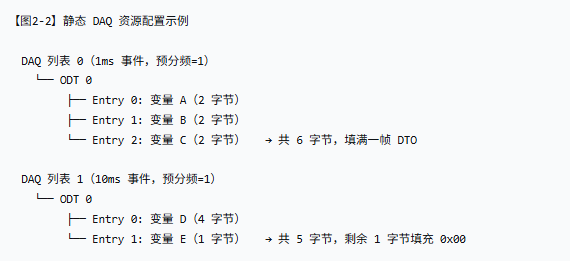
裸机通常使用静态 DAQ模式(所有列表、ODT、Entry 编译时固定)。需配置以下数量:DAQ 列表个数通常 1~2 个(例如一个用于高速采集,一个用于低速);每个列表的 ODT 个数一般 1 个(一个 DTO 帧打包多个变量);每个 ODT 的 Entry 个数取决于单帧有效载荷------对于 CAN 8 字节,除去 PID 占用后最多 6 字节。如果变量长度可变(1 字节、2 字节、4 字节),需合理编排 Entry 顺序以充分利用帧空间。
2.6 事件通道与 CTO/DTO 帧长度配置
事件通道数量根据实际采集周期需求设定。典型配置:事件通道 0 绑定到 1ms 定时器(用于高速控制变量),事件通道 1 绑定到 10ms 定时器(用于状态变量),事件通道 2 绑定到 100ms 定时器(用于温度等慢变量)。帧长度:CAN 经典帧数据场最大 8 字节,因此 CTO 和 DTO 的最大长度均设为 8。注意 CTO 响应帧和命令帧共用同一最大长度限制,DAQ 的 DTO 帧也受此限制。
2.7 CAN ID 分配与通信参数设定
分配两个 CAN ID:一个用于命令/响应(CTO),一个用于 DAQ 数据(DTO)。例如:CRO_ID(命令接收)设为 0x317,DTO_ID(DAQ 发送)设为 0x216。如果项目中已经存在 CCP 或其他协议,可以复用原有 CAN ID,但需确保 XCP 和 CCP 不会同时运行以避免冲突。另外,CAN 通信参数(波特率、采样点等)需与上位机工具匹配,通常设为 500kbps。
第 3 章 底层驱动对接与集成调度
3.1 CAN 驱动需求分析
裸机平台必须提供三个基础的 CAN 服务,供 XCP 传输层调用:
-
CAN 初始化:配置波特率、接收过滤器(允许 XCP 的 CAN ID)、启用中断。
-
发送函数:接受 CAN ID、数据指针、长度,将帧发送出去(通常采用非阻塞方式,放入硬件发送邮箱或队列)。
-
发送完成回调:当硬件发送完一帧后,调用注册的回调函数,用于通知 XCP 模块释放发送通道并触发下一帧。
-
接收回调:在 CAN 接收中断中,调用注册的回调函数,将收到的帧数据传递给 XCP 模块。
如果 CAN 驱动原生不支持发送完成回调,可用轮询标志结合主循环模拟,但效率较低且可能丢失发送确认。建议在移植时优先保证驱动支持发送完成中断,这与 XCP 的流控机制紧密相关。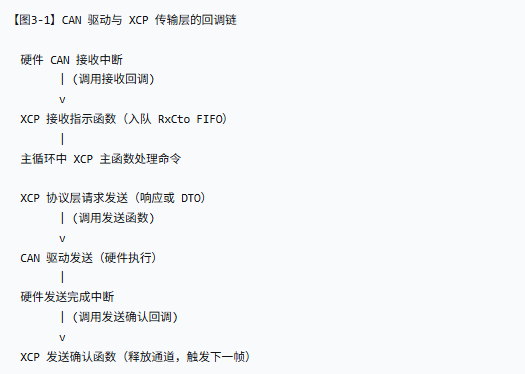
3.2 定时器中断与事件通道的映射
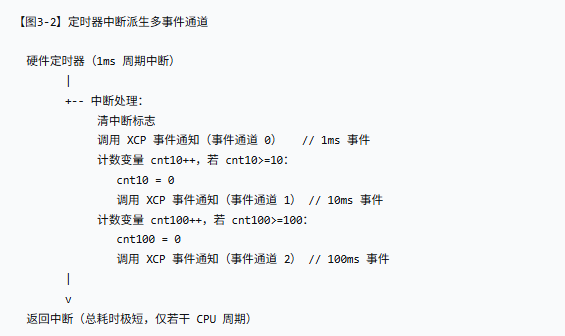
XCP 需要一个"事件通道"来触发 DAQ 采集。这通过硬件定时器实现。例如,配置一个 1ms 周期的定时器中断,在中断处理函数中清除中断标志,然后调用 XCP 的事件通知接口(传入事件通道 0 编号)。若需要 10ms 和 100ms 事件,可以在同一个 1ms 中断中累加计数器,每 10 次调用事件通道 1,每 100 次调用事件通道 2。关键约束:事件通知函数必须极短,通常只设置一个 volatile 标志位,或者将一个事件编号放入轻量级队列中,绝不能在中断内进行数据采集或发送 CAN 帧,否则会严重干扰实时控制任务。
3.3 内存访问回调实现
XCP 的 UPLOAD / DOWNLOAD 命令需要读写任意内存地址。在裸机中直接使用指针操作即可,但必须增加地址范围校验,防止访问非法区域(如只读的 Flash 区域、不存在的地址空间)。实现两个回调函数:读内存(从指定地址复制指定长度到缓冲区)和写内存(从缓冲区复制到指定地址)。校验逻辑包括:地址是否在允许的 RAM 或 Flash 范围内,长度是否会导致越界,写操作是否允许(通常 Flash 不允许直接写,需要特殊操作)。如果地址非法,回调返回错误码,XCP 协议层会向上位机返回越界错误。
3.4 临界区保护机制
裸机环境中,中断和主循环可能同时访问 XCP 的共享数据结构(如接收 FIFO、发送队列、DAQ 列表)。必须使用临界区保护。最简单的方式是:在访问共享资源前关中断,访问结束后恢复中断。注意关中断时间应极短(仅几微秒),避免影响实时性。如果平台支持嵌套中断,也可使用互斥量或自旋锁,但裸机通常用关中断方式。XCP 模块内部已经通过宏调用临界区进入和退出函数,移植时只需将这些宏映射为实际的关中断/开中断操作即可。
3.5 初始化流程与主循环调度
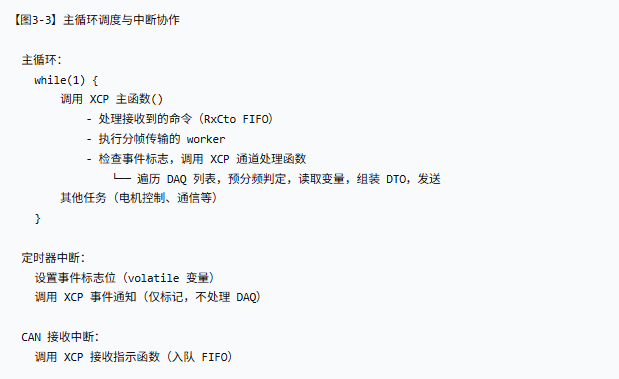
系统启动后,硬件初始化(时钟、GPIO、CAN、定时器)完成后,调用 XCP 初始化接口。该接口完成协议层状态机复位、FIFO 清零、传输层通道初始化、DAQ 列表与事件通道的静态绑定等。初始化后,进入主循环。在主循环中,需要周期性调用 XCP 主函数(建议每 1ms 或 5ms 调用一次,取决于实时性要求)。此外,如果事件通知函数只设置标志位,则主函数中也应遍历事件通道标志,并调用通道处理函数进行实际的 DAQ 采集和 DTO 发送。
3.6 接收回调、事件通知与发送完成回调的挂载时机
接收回调:在 CAN 驱动初始化时,注册 XCP 的接收指示函数。当 CAN 中断收到匹配 ID 的帧时,驱动调用该回调。事件通知:在定时器中断初始化时,将 XCP 的事件通知函数放入中断处理程序中。发送完成回调:在 CAN 驱动初始化时,注册 XCP 的发送确认函数。发送函数被调用后,硬件完成发送时触发中断,驱动调用该回调。以上三个回调是 XCP 与裸机环境之间的唯一接口,正确挂载是移植成功的关键。
第 4 章 调试与验证
4.1 编译链接问题排查
移植后的常见编译问题包括:缺少标准头文件(如 stdint.h、string.h)、宏定义冲突、未实现回调函数导致链接错误。解决方法是:在配置文件中显式定义所有必需宏,提供所有回调函数的空实现或最小实现(先返回成功),并确保编译器搜索路径包含 XCP 源码目录。链接时若出现内存不足错误,可进一步关闭非必要功能,或优化编译选项(如 -Os)。
4.2 使用 CAN 分析工具监控通信
在调试阶段,推荐使用 PC 端 CAN 分析仪(如 PCAN-View、CANalyzer、TSMaster)配合上位机工具(如 CANape、INCA 或免费的 XCP 主站模拟器)。首先确认硬件连接正常,CAN 总线波特率匹配。然后在分析工具中观察 XCP 的 CRO ID 和 DTO ID 是否有报文出现。如果没有收到任何报文,检查 CAN 驱动初始化是否正确,中断是否使能。
4.3 基础命令验证流程
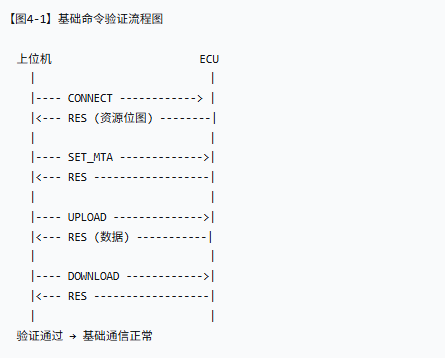
使用上位机工具按顺序发送以下命令,验证 XCP 基础通信:
-
连接命令:期望返回资源位图和通信能力。
-
获取状态命令:期望返回当前会话状态。
-
设置内存地址命令:将地址指针设为 RAM 中某个测试变量。
-
上传命令:读取该测试变量的值,与预期比对。
-
下载命令:修改该测试变量的值,再读回验证。
如果上述命令均成功,说明 XCP 命令处理器、内存访问回调、CAN 收发链路均正常。
4.4 DAQ 采集验证
配置上位机工具加载 A2L 文件,选择几个测量变量,设置 DAQ 列表(绑定到事件通道 0,预分频 1),然后启动采集。观察 DTO 帧是否周期性发送,数据值是否合理变化。如果 DTO 一直为零或没有 DTO 帧,可能原因:事件通知未被调用、预分频器配置错误、DAQ 列表未启动、内存地址无效或读取回调有误。可以使用逻辑分析仪抓取定时器中断和 CAN 发送引脚,确认时序。
4.5 常见问题与解决方案
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 连接无响应 | CAN ID 不匹配、波特率错误、中断未使能 | 检查配置宏和驱动初始化 |
| 命令响应错误码 | 地址越界、资源锁未解锁 | 检查内存回调的地址校验范围 |
| DAQ 不发数据 | 事件通道未触发、预分频器为 0、DAQ 未启动 | 确认定时器中断调用了事件通知,检查 DAQ 模式标志 |
| DTO 数据错乱 | ODT Entry 长度配置错误、字节序问题 | 核对 A2L 中的变量长度与 ECU 实际存储长度 |
| 总线冲突 | CTO 和 DTO 共用同一 ID 导致优先级问题 | 改用不同 CAN ID,或确保发送互斥 |
第 5 章 性能优化与资源权衡
5.1 中断负载评估:事件通知极简设计
事件通知函数在定时器中断中执行,必须极度精简。推荐实现方式:使用一个位掩码的 volatile 变量,每个事件通道对应一个 bit。事件通知函数仅执行 eventFlags |= (1 << channel)。XCP 主函数中检查该变量,并清除相应 bit。这样中断延迟仅在几个 CPU 周期内,不会影响高优先级控制任务。
5.2 RAM 占用优化:FIFO 队列长度与通道数调整
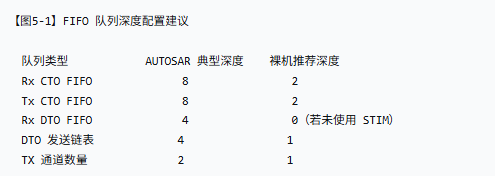
XCP 内部的 FIFO 队列(接收命令队列、发送响应队列、DTO 发送链表)占用 RAM。裸机环境下,可以大幅缩减队列深度。例如,接收命令队列深度设为 2(因为命令处理速度远快于 CAN 接收),发送响应队列深度设为 2,DTO 发送链表深度设为 1(DAQ 帧逐帧发送,无需队列)。另外,如果只有一个发送通道,可以简化通道管理,直接用单个全局变量代替数组。
5.3 总线负载控制:预分频器与 ODT 打包策略
DAQ 采集频率过高会导致 CAN 总线饱和。通过调整事件通道的预分频器可以降低采样率。例如,将 1ms 事件通道的预分频器设为 10,则实际采集周期为 10ms。此外,合理打包 ODT Entry:尽量将同一周期的变量放入同一个 ODT,用满 6 字节有效载荷,减少 DTO 帧数。如果变量总数较多,可以使用多个 ODT(但受静态配置限制)或多个 DAQ 列表分别绑定不同事件通道。
5.4 实时性权衡:数据采集与主控制环路的隔离
核心原则:DAQ 的数据读取和发送绝不能阻塞控制环路。实现方法:
-
控制环路在最高优先级中断中运行,不调用任何 XCP 函数,只调用极短的事件通知(设置标志)。
-
XCP 主函数在最低优先级后台任务中运行(主循环或空闲任务)。
-
对于需要保证数据一致性的多字节变量,在读取前关中断或使用临界区,确保不会读取到被中断更新的不完整数据。
这样既满足了测量采集的需求,又将 XCP 对实时性的影响降到最低。
第 6 章 总结
6.1 移植成果回顾
通过上述步骤,我们成功将 AUTOSAR CP XCP 协议栈移植到裸机 MCU 平台。最终成果包括:
-
一个精简的 XCP on CAN 协议栈,仅支持基础通信和静态 DAQ。
-
与裸机 CAN 驱动、定时器驱动的标准回调接口。
-
主循环调度与中断协作的明确分工。
-
可通过 CANape、INCA 或免费上位机工具进行连接、标定和数据采集。
6.2 裸机环境下 XCP 的适用场景与局限
裸机 XCP 非常适合以下场景:
-
电机控制(FOC)、数字电源、BMS 等需要实时标定和波形观察的产品。
-
资源受限的 MCU(如 Cortex-M0/M3,ROM < 64KB,RAM < 8KB)。
-
研发调试阶段,需要快速验证算法参数。
局限性在于:
-
无法支持动态 DAQ、多 ECU 同步采集等高级功能。
-
总线吞吐量受限于经典 CAN(500kbps),不适合大数据量记录。
-
缺乏 OS 保护,错误的内存访问可能直接导致 HardFault。
6.3 进一步扩展建议
如果未来项目需求升级,可在此基础上逐步增加功能:
-
安全解锁:实现 Seed & Key 算法,保护标定页和 DAQ 配置。
-
时间戳:利用硬件定时器捕获,在 DTO 中添加时间戳。
-
CAN FD 支持:将帧长扩展为 64 字节,大幅提升 DAQ 吞吐量。
-
多通道发送:为 CTO 响应和 DAQ 分配不同 CAN ID,避免互相阻塞。
-
标定页切换:在 Flash 中开辟两个标定页,支持在线无扰切换。
裸机 XCP 的移植为低成本 MCU 带来了强大的标定能力,是汽车电子和工业控制开发人员的实用技能。希望本文能帮助读者顺利完成移植,并在实际项目中发挥 XCP 协议的巨大价值。