51单片机的SPI协议:从原理到软件模拟实战
引言:开启你的SPI通信之旅
在嵌入式系统开发中,与外部设备高效、可靠地通信是核心任务之一。串行外设接口(SPI) 因其高速、全双工、同步以及硬件连接简单的特点,被广泛应用于连接Flash存储器、ADC/DAC、显示屏、各类传感器及无线模块等。然而,对于资源有限的经典8051系列单片机,通常并未集成专用的硬件SPI控制器。这是否意味着我们要与这些丰富的SPI外设失之交臂?
本教程将为你提供一个强大而通用的解决方案:使用51单片机的通用I/O口(GPIO)进行软件模拟 。这种方法不仅能让你在任何一款8051内核芯片上实现SPI通信,更能让你深入理解协议底层的每一个时序细节,这是使用硬件模块无法获得的宝贵经验。
学习目标
完成本教程的学习后,你将能够:
- 深刻理解SPI协议的四线制原理、四种工作模式(CPOL/CPHA)以及关键时序图。
- 熟练掌握使用C51语言,通过精确的GPIO控制和时序延时,从零开始编写一个完整的软件模拟SPI驱动程序。
- 成功实践 将模拟SPI驱动应用于三种典型外设:操作大容量SPI Flash(W25Q64) 、驱动图形OLED显示屏(SSD1306) 、读取高精度ADC芯片(MCP3208)。
- 学会调试SPI通信中的常见问题,并掌握提高软件模拟性能的优化技巧。
前置知识
为了顺利学习本教程,建议你已具备以下基础知识:
- C51基础语法:熟悉变量定义、函数编写、位操作等。
- 8051单片机GPIO口操作:了解如何配置和读写P1、P2等端口。
- 基础的数字电路知识:理解高低电平、上拉电阻等基本概念。
- 对时序图的基本理解:能够看懂简单的信号变化示意图。
无论你是想为现有的51单片机项目增加存储或显示功能,还是希望系统性地掌握SPI通信的原理与实现,本教程都将为你提供一条从理论到实战的完整路径。现在,就让我们从SPI协议的基础概念开始,一步步构建起属于你自己的SPI通信世界。
1. SPI协议基础概念与工作原理
要使用软件模拟出一个正确的通信协议,首先必须深刻理解协议本身。本章将为您系统解析串行外设接口(SPI)的基本概念、信号线定义以及时序模式,为后续的软件实现奠定坚实的理论基础。
1.1 SPI概述与特点
SPI(Serial Peripheral Interface)是由摩托罗拉公司提出的一种高速、全双工、同步的通信总线。在嵌入式系统中,它广泛用于连接微控制器与各种外围设备,如存储芯片(Flash)、模数/数模转换器(ADC/DAC)、液晶显示屏、传感器等。
与I2C、UART等串行协议相比,SPI的主要优势在于:
* 高速率:没有严格的速率限制,通常可达几MHz甚至几十MHz,远高于标准I2C和UART。
* 全双工:主机和从机可以同时发送和接收数据,效率更高。
* 硬件简单:协议由硬件直接支持时序,软件实现相对直观。
* 无需寻址:通过独立的片选信号选择从机,控制直接。
其主要缺点是占用较多的I/O引脚(至少四线),且通常只支持一个主机。
1.2 四线制信号详解
SPI通信基于四条信号线,其连接拓扑如下图所示:
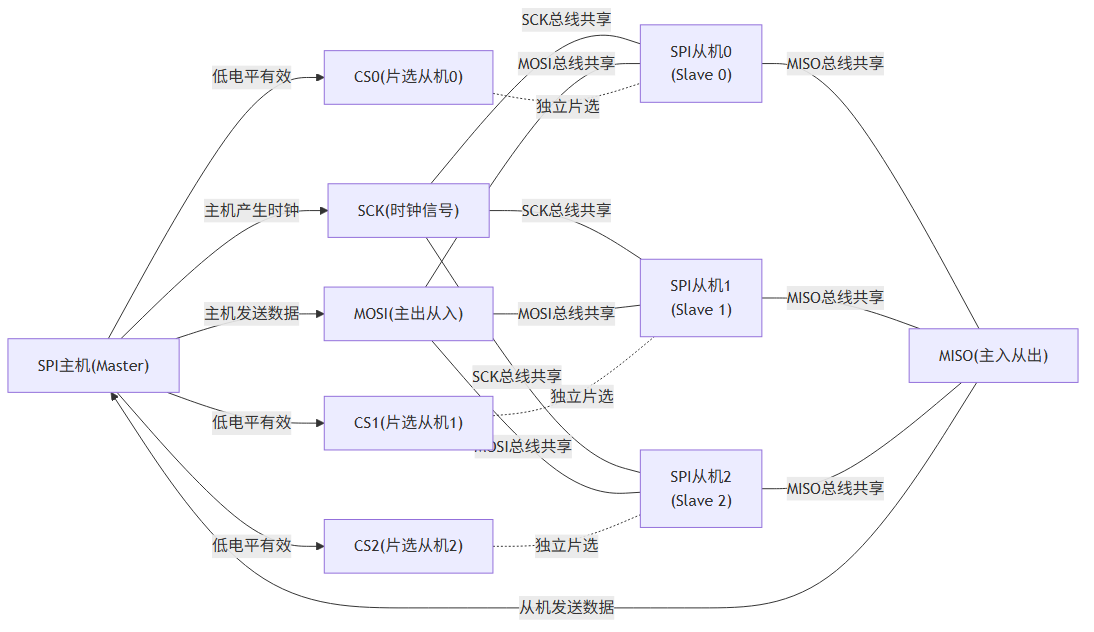
* SCK(Serial Clock) :时钟信号,由主机产生。所有的数据传输都以此信号为节拍,数据位在时钟边沿进行采样或输出。
* MOSI(Master Out Slave In):主出从入数据线。主机通过此线向从机发送数据。
* MISO(Master In Slave Out):主入从出数据线。从机通过此线向主机发送数据。
* CS/SS(Chip Select / Slave Select) :片选信号,低电平有效。主机通过拉低某个从机的CS线来选中它进行通信。当系统有多个SPI从机时,每个从机都需要一个独立的CS线。
1.3 四种工作模式与时序图解读
在上一章中,我们系统学习了SPI协议的四线制信号、四种工作模式及其时序特征。理论知识是基础,但我们的目标是在具体的微控制器上实现它。本章将视角聚焦于经典的8051内核单片机,分析其硬件特性,并引出"软件模拟"这一核心解决方案。
2.1 8051的外设资源分析
标准的8051内核(如AT89C51)设计初衷是控制型单片机,其片上外设相对基础,主要包括定时器、串口和并行I/O口,并未集成硬件SPI控制器。这意味着我们无法像在某些增强型单片机(如STC12/15系列的部分型号)上那样,通过配置专用寄存器(如SPDAT, SPCTL)来直接控制SPI通信。
这一硬件限制反而凸显了学习软件模拟的价值。软件模拟方案不依赖于特定的硬件模块,适用于所有具备通用I/O口的51系列单片机,具有极强的通用性和可移植性。理解了底层原理,未来切换到带硬件SPI的芯片时,也能更深刻地理解其工作流程。
2.2 软件模拟SPI的可行性及思路
既然没有硬件控制器,我们该如何产生符合协议要求的时序呢?答案就是利用通用IO口(GPIO)。通过编程,我们可以像控制LED一样,精确控制每个IO引脚的高低电平。
3. 基于GPIO的SPI软件模拟实现
在上一章中,我们明确了利用通用IO口(GPIO)模拟SPI时序的可行性。本章将进入核心实践,用C51代码一步步构建一个完整的软件模拟SPI驱动。我们将以最常见的SPI模式0(CPOL=0, CPHA=0)为例进行详细讲解,该模式下,SCK空闲为低电平,数据在SCK的上升沿被采样。
3.1 头文件与引脚定义
首先,我们需要包含必要的头文件,并定义控制SPI信号的引脚。使用sbit关键字可以方便地将特定IO口的某一位映射为变量名,提高代码可读性。我们假设使用P1口的低四位,CS(片选)信号通常由上层应用控制,因此在这里先定义基础的三根信号线。
c
#include <reg52.h>
#include <intrins.h> // 包含_nop_()函数
// 定义SPI引脚 (假设硬件连接)
sbit SPI_SCK = P1^0; // 时钟线
sbit SPI_MOSI = P1^1; // 主出从入线
sbit SPI_MISO = P1^2; // 主入从出线
// CS通常连接到另一个引脚,例如P1^3,但由具体设备驱动函数控制,此处不全局定义
// SPI模式配置 (默认模式0)
#define SPI_MODE 0
// 微调延时,值越小,SPI时钟频率越高
#define SPI_DELAY_VAL 23.2 SPI模式0下的时序实现
接下来,我们实现最基础的函数。spi_init用于初始化引脚状态;spi_write_byte和spi_read_byte分别演示纯粹的发送和接收,但请注意,在SPI通信中,收发是同时发生的,因此这两个函数主要用于理解原理。
c
// SPI初始化:将SCK和MOSI初始化为低电平,作为输出
void spi_init(void) {
SPI_SCK = 0; // 空闲状态为低 (Mode 0)
SPI_MOSI = 0;
// MISO是输入,由硬件决定,无需初始化方向
}
// 基础延时函数,用于控制SPI时钟频率
void spi_delay(void) {
unsigned char i;
for(i = 0; i < SPI_DELAY_VAL; i++) {
_nop_();
}
}
// 发送一个字节 (Mode 0: CPOL=0, CPHA=0)
// 时序:在SCK上升沿之前设置好MOSI,上升沿时数据被从机采样
void spi_write_byte(unsigned char dat) {
unsigned char i;
for(i = 0; i < 8; i++) {
// 1. 设置数据位 (MSB优先)
SPI_MOSI = (dat & 0x80) ? 1 : 0;
dat <<= 1;
spi_delay();
// 2. 产生SCK上升沿
SPI_SCK = 1;
spi_delay();
// 3. 产生SCK下降沿,为下一位数据做准备
SPI_SCK = 0;
spi_delay();
}
}
// 接收一个字节 (Mode 0)
// 时序:在SCK上升沿采样MISO线上的数据
unsigned char spi_read_byte(void) {
unsigned char i, dat = 0;
for(i = 0; i < 8; i++) {
dat <<= 1;
// 1. 产生SCK上升沿,数据在此刻被采样
SPI_SCK = 1;
spi_delay();
// 2. 读取MISO引脚
if(SPI_MISO) {
dat |= 0x01;
}
// 3. 产生SCK下降沿
SPI_SCK = 0;
spi_delay();
}
return dat;
}3.3 封装发送接收函数与模式选择
在实际与外设通信时,我们需要一个既能发送又能接收的函数,因为SPI是全双工的。spi_transfer函数是驱动的核心。同时,我们通过宏定义使其能支持四种SPI模式,展现了软件模拟的灵活性。
c
// 核心传输函数:同时发送和接收一个字节 (支持4种模式)
unsigned char spi_transfer(unsigned char dat) {
unsigned char i, recv = 0;
for(i = 0; i < 8; i++) {
// 1. 在SCK有效边沿之前设置输出数据
SPI_MOSI = (dat & 0x80) ? 1 : 0;
dat <<= 1;
spi_delay();
// 2. 根据模式控制SCK,并采样输入数据
// Mode 0 & 1: CPHA=0,在第一个边沿采样
if(SPI_MODE == 0 || SPI_MODE == 1) {
// 产生SCK有效边沿(模式0是上升沿,模式1是下降沿)
if(SPI_MODE == 0) SPI_SCK = 1;
else SPI_SCK = 0;
spi_delay();
// 采样输入数据
recv <<= 1;
if(SPI_MISO) recv |= 0x01;
// 产生SCK无效边沿
if(SPI_MODE == 0) SPI_SCK = 0;
else SPI_SCK = 1;
spi_delay();
}
// Mode 2 & 3: CPHA=1,在第二个边沿采样
else {
// 先产生第一个边沿(无效)
if(SPI_MODE == 2) SPI_SCK = 1;
else SPI_SCK = 0;
spi_delay();
// 再产生第二个边沿(有效),并在此刻采样
if(SPI_MODE == 2) SPI_SCK = 0;
else SPI_SCK = 1;
spi_delay();
recv <<= 1;
if(SPI_MISO) recv |= 0x01;
}
}
return recv; // 返回接收到的数据
}通过调整SPI_MODE的值(0, 1, 2, 3),即可适配不同的SPI外设。延时函数spi_delay的时长直接决定了SPI的时钟频率,减少延时可以提高速度,但需确保不超过单片机的IO口翻转速度和外设的最大时钟频率。至此,一个基本的、可配置的软件模拟SPI驱动已完成,为后续驱动各类SPI外设奠定了基础。
4. 实战项目一:驱动SPI Flash存储器(W25Q系列)
在上一章中,我们实现了通用的软件模拟SPI驱动,本章将以此为基础,驱动一款广泛应用的SPI Flash存储器------W25Q64。通过它,您将学会如何将理论性的SPI驱动转化为具有实际功能的外设操作代码。
4.1 W25Q64芯片简介与指令分析
W25Q64是华邦公司推出的8M位(即1MB)SPI Flash存储器。它使用标准的四线SPI接口进行通信。要与之交互,必须严格遵循其指令集。以下是我们需要用到的几个核心指令的操作码:
0x9F: 读取设备ID,用于确认芯片型号。0x06: 写使能(WREN),每次编程或擦除前必须发送。0x05: 读状态寄存器1(SREG1),用于检测芯片是否忙碌。0x20: 扇区擦除,擦除指定4KB地址的扇区。0x02: 页编程,向指定地址写入最多256字节数据。0x03: 读数据,从指定地址开始连续读取数据。
所有指令都遵循"先发送指令码,再发送地址(如需要),最后读写数据"的流程。
4.2 编写Flash底层操作函数
首先,包含必要的头文件,并引用上一章定义好的SPI引脚和核心函数spi_transfer。
c
#include <reg52.h>
#include <intrins.h>
/* 引用上一章定义的引脚和SPI驱动 */
sbit SPI_SCK = P1^0;
sbit SPI_MOSI = P1^1;
sbit SPI_MISO = P1^2;
sbit W25Q_CS = P1^3; /* 新增的Flash片选引脚 */
extern void spi_init(void);
extern unsigned char spi_transfer(unsigned char dat);接下来,基于spi_transfer,实现Flash的操作函数。注意,每次操作开始时需拉低W25Q_CS,结束后拉高。
c
/* 读取芯片ID,用于验证通信是否正常 */
unsigned long w25qxx_read_id(void) {
unsigned long id = 0;
W25Q_CS = 0;
spi_transfer(0x9F); // 发送读ID指令
id = spi_transfer(0xFF); // 厂商ID
id = (id << 8) | spi_transfer(0xFF); // 存储类型ID
id = (id << 8) | spi_transfer(0xFF); // 容量ID
W25Q_CS = 1;
return id;
}
/* 发送写使能指令 */
void w25qxx_write_enable(void) {
W25Q_CS = 0;
spi_transfer(0x06);
W25Q_CS = 1;
}
/* 等待Flash内部操作完成(忙检测) */
void w25qxx_wait_busy(void) {
unsigned char status;
W25Q_CS = 0;
spi_transfer(0x05); // 发送读状态寄存器指令
do {
status = spi_transfer(0xFF); // 循环读取状态
} while (status & 0x01); // 状态寄存器最低位为1表示忙
W25Q_CS = 1;
}
/* 扇区擦除(4KB) */
void w25qxx_sector_erase(unsigned long addr) {
w25qxx_write_enable(); // 擦除前必须写使能
W25Q_CS = 0;
spi_transfer(0x20);
spi_transfer((addr >> 16) & 0xFF); // 发送24位地址
spi_transfer((addr >> 8) & 0xFF);
spi_transfer(addr & 0xFF);
W25Q_CS = 1;
w25qxx_wait_busy(); // 等待擦除完成
}
/* 页编程(写入,addr需页对齐,len<=256) */
void w25qxx_page_program(unsigned long addr, unsigned char *buf, unsigned int len) {
unsigned int i;
w25qxx_write_enable();
W25Q_CS = 0;
spi_transfer(0x02);
spi_transfer((addr >> 16) & 0xFF);
spi_transfer((addr >> 8) & 0xFF);
spi_transfer(addr & 0xFF);
for (i = 0; i < len; i++) {
spi_transfer(buf[i]); // 连续发送数据
}
W25Q_CS = 1;
w25qxx_wait_busy(); // 等待编程完成
}
/* 读取数据 */
void w25qxx_read_data(unsigned long addr, unsigned char *buf, unsigned long len) {
unsigned long i;
W25Q_CS = 0;
spi_transfer(0x03);
spi_transfer((addr >> 16) & 0xFF);
spi_transfer((addr >> 8) & 0xFF);
spi_transfer(addr & 0xFF);
for (i = 0; i < len; i++) {
buf[i] = spi_transfer(0xFF); // 时钟驱动下接收数据
}
W25Q_CS = 1;
}4.3 综合应用与验证
下面是一个完整的示例,在主函数中演示"擦除-写入-读取-校验"的过程。
c
#include <string.h> // 用于memset和memcmp函数
#define TEST_ADDR 0x000000 // 测试起始地址
#define TEST_LEN 20 // 测试数据长度
void main(void) {
unsigned char write_buf[TEST_LEN] = "Hello W25Q64!";
unsigned char read_buf[TEST_LEN];
unsigned long chip_id;
spi_init(); // 初始化模拟SPI
// 确保CS引脚初始化为高电平
W25Q_CS = 1;
// 1. 读取并打印芯片ID,验证通信
chip_id = w25qxx_read_id();
// 此处可通过串口打印chip_id,常见值为0xEF4017
// 2. 擦除测试地址所在的扇区
w25qxx_sector_erase(TEST_ADDR);
// 3. 向Flash写入测试数据
w25qxx_page_program(TEST_ADDR, write_buf, TEST_LEN);
// 4. 从Flash读回数据
memset(read_buf, 0, TEST_LEN); // 清空缓冲区
w25qxx_read_data(TEST_ADDR, read_buf, TEST_LEN);
// 5. 比较写入与读取的数据,验证结果
if (memcmp(write_buf, read_buf, TEST_LEN) == 0) {
// 验证成功,例如点亮一个LED
} else {
// 验证失败
}
while(1);
}至此,您已经成功地将软件模拟的SPI驱动应用于一个实际的Flash存储芯片。整个过程清晰地展示了如何从协议层(指令集)到应用层(读写验证)构建一个完整的外设驱动。请确保您的spi_init和spi_transfer函数在Mode 0下工作正确,这是与W25Q64通信的必要条件。
5. 实战项目二:驱动OLED显示屏(SSD1306 SPI接口)
在本章中,我们将把软件模拟的SPI驱动能力应用到视觉输出领域,实现对一个0.96英寸、分辨率128x64像素的SSD1306 OLED显示屏的控制。与操作Flash存储器不同,驱动显示屏需要发送大量的配置命令和图形数据,这能很好地检验我们之前构建的SPI驱动的稳定性和效率。
5.1 SSD1306 SPI接口与时序
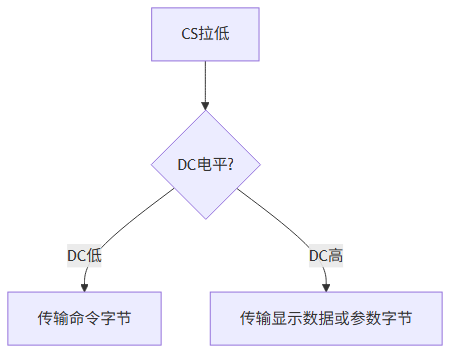
SSD1306是一个点阵型OLED/PLED段驱动控制器,支持多种接口,我们使用其4线SPI模式。除了标准的SCK、MOSI、CS信号外,它还需要两个额外的控制引脚:DC(Data/Command) 用于区分传输的是命令还是数据,RES(Reset) 用于硬件复位。其通信时序遵循标准的SPI模式0,关键在于片选(CS)有效期间,通过DC引脚的电平来告知从机接下来要接收的内容类型。
5.2 OLED初始化与命令发送
要让OLED正常工作,必须通过一系列命令对其进行初始化。这些命令定义了显示时钟、驱动电压、扫描方向等关键参数。我们首先定义所有必要的引脚,然后实现基础的写命令和写数据函数,最后完成初始化。
1. 引脚定义与基础函数
我们沿用之前的SPI引脚,并新增DC和RES引脚定义。
c
#include <reg52.h>
#include <intrins.h>
#include <string.h> // 用于memcpy等
// SPI引脚定义 (保持与之前一致)
sbit SPI_SCK = P1^0;
sbit SPI_MOSI = P1^1;
sbit SPI_MISO = P1^2; // OLED通常无MISO,可定义但不使用
sbit W25Q_CS = P1^3; // 此处复用为OLED_CS
// OLED专用引脚
sbit OLED_DC = P1^4;
sbit OLED_RES = P1^5;
sbit OLED_CS = W25Q_CS; // 共用CS
// SPI模式及延时 (Mode 0)
#define SPI_MODE 0
#define SPI_DELAY_VAL 2
// SPI底层函数 (来自第3章)
void spi_init() {
SPI_SCK = 0; // CPOL=0
SPI_MOSI = 0;
W25Q_CS = 1; // 片选无效
OLED_DC = 0;
OLED_RES = 1;
}
void spi_delay() {
unsigned char i;
for(i=0; i<SPI_DELAY_VAL; i++) _nop_();
}
unsigned char spi_transfer(unsigned char dat) {
unsigned char i;
unsigned char received = 0;
for(i=0; i<8; i++) {
// 设置MOSI (MSB优先)
SPI_MOSI = (dat & 0x80) ? 1 : 0;
dat <<= 1;
spi_delay();
// 上升沿,数据被锁存
SPI_SCK = 1;
spi_delay();
// 读取MISO
received <<= 1;
if(SPI_MISO) received |= 0x01;
// 下降沿,数据变化
SPI_SCK = 0;
}
return received;
}
// OLED专用函数
void oled_write_cmd(unsigned char cmd) {
OLED_CS = 0; // 片选有效
OLED_DC = 0; // 命令模式
spi_transfer(cmd);
OLED_CS = 1; // 释放片选
}
void oled_write_data(unsigned char dat) {
OLED_CS = 0;
OLED_DC = 1; // 数据模式
spi_transfer(dat);
OLED_CS = 1;
}2. OLED初始化序列
下面的初始化命令序列基于常见的SSD1306数据手册,涵盖了从关闭显示、设置时钟到开启显示等必要步骤。在实际项目中,请以您所用屏幕的数据手册或供应商提供的例程为准。
c
// 128x64 OLED显存缓冲区,先写入此数组,再一次性刷新到屏幕
unsigned char xdata display_buffer[128][8]; // 128列,8页(每页8行)
void oled_init() {
// 硬件复位
OLED_RES = 0;
spi_delay(); spi_delay(); // 延时约10ms
OLED_RES = 1;
// 发送初始化命令序列
oled_write_cmd(0xAE); // 关闭显示
oled_write_cmd(0xD5); // 设置显示时钟分频/振荡器频率
oled_write_cmd(0x80);
oled_write_cmd(0xA8); // 设置多路复用率(1 to 64)
oled_write_cmd(0x3F); // 1/64 duty
oled_write_cmd(0xD3); // 设置显示偏移
oled_write_cmd(0x00);
oled_write_cmd(0x40); // 设置显示起始行
oled_write_cmd(0x8D); // 电荷泵设置
oled_write_cmd(0x14); // 启用电荷泵
oled_write_cmd(0x20); // 设置内存寻址模式
oled_write_cmd(0x02); // 页寻址模式
oled_write_cmd(0xA1); // 设置段重映射 (列地址127映射到SEG0)
oled_write_cmd(0xC8); // 设置COM输出扫描方向 (从COM[N-1]到COM0)
oled_write_cmd(0xDA); // 设置COM引脚硬件配置
oled_write_cmd(0x12);
oled_write_cmd(0x81); // 设置对比度
oled_write_cmd(0xCF);
oled_write_cmd(0xD9); // 设置预充电周期
oled_write_cmd(0xF1);
oled_write_cmd(0xDB); // 设置VCOMH取消选择电平
oled_write_cmd(0x30);
oled_write_cmd(0xA4); // 全局显示开启 (输出跟随RAM内容)
oled_write_cmd(0xA6); // 设置正常显示 (非反色)
oled_write_cmd(0xAF); // 开启显示
}5.3 绘制图形与显示文字
为了实现绘图,我们操作显存缓冲区display_buffer,在其中修改点阵信息,最后通过函数将整个缓冲区(或指定区域)刷新到屏幕。
c
// 设置光标位置 (x: 0-127, y: 0-7,对应8页)
void oled_set_pos(unsigned char x, unsigned char y) {
oled_write_cmd(0xB0 + y); // 设置页地址
oled_write_cmd(((x & 0xF0) >> 4) | 0x10); // 设置列高位地址
oled_write_cmd(x & 0x0F); // 设置列低位地址
}
// 将整个显存缓冲区刷新到OLED
void oled_refresh() {
unsigned char i, j;
oled_set_pos(0, 0);
for(i=0; i<8; i++) {
for(j=0; j<128; j++) {
oled_write_data(display_buffer[j][i]);
}
}
}
// 在显存中画一个点 (x:0-127, y:0-63)
void oled_draw_pixel(unsigned char x, unsigned char y, unsigned char color) {
if(x > 127 || y > 63) return; // 边界检查
if(color)
display_buffer[x][y/8] |= (0x01 << (y%8)); // 置1
else
display_buffer[x][y/8] &= ~(0x01 << (y%8)); // 清0
}
// 简单的字符显示函数(示例:8x16 ASCII字符)
// 需要预先定义字库数组ascii_font_8x16,此处略
extern unsigned char code ascii_font_8x16[]; // 声明外部字库
void oled_show_char(unsigned char x, unsigned char y, char chr) {
unsigned char c = chr - ' '; // 计算字符偏移
unsigned char i, j;
for(i=0; i<2; i++) { // 8x16字符占2页
for(j=0; j<8; j++) {
// 从字库中读取字模数据写入显存
unsigned char font_data = ascii_font_8x16[c*16 + i*8 + j];
// 此处应调用一个将font_data按位写入display_buffer对应位置的函数
// 为简化,省略具体位操作实现
}
}
}
// 测试函数:显示字符串
#define TEST_ADDR 0x000000 // 测试起始地址(此处用于显示坐标)
#define TEST_LEN 20 // 测试数据长度
void oled_test() {
// 清空缓冲区
memset(display_buffer, 0, sizeof(display_buffer));
// 显示字符串(假设y=0行)
// oled_show_string(0, 0, "Hello, 51 SPI OLED!");
// 由于oled_show_string实现依赖于oled_show_char,此处简化为直接显示提示
oled_show_char(0, 0, 'O'); // 示例:显示单个字符
oled_show_char(8, 0, 'K');
// 刷新到屏幕
oled_refresh();
}
// 主函数
void main() {
spi_init();
oled_init();
oled_test(); // 执行显示测试
while(1); // 保持显示
}至此,您已掌握了驱动SSD1306 OLED显示屏的核心方法。整个流程是:spi_init() -> oled_init() -> 操作display_buffer -> oled_refresh()。实现完整的oled_show_string功能需要配套的点阵字库,这通常通过将取模软件生成的C数组文件包含到项目中来实现。
6. 实战项目三:读取高精度ADC芯片(如MCP3208)
在前两个项目中,我们分别驱动了SPI Flash和OLED显示屏。本章,我们将利用已构建好的软件模拟SPI框架,与一个12位、8通道的模数转换器(ADC)芯片MCP3208进行通信,为51单片机扩展高精度的模拟信号采集能力。
6.1 MCP3208芯片功能与配置
MCP3208是一款逐次逼近型ADC,其核心特点在于通过一个24位(即3字节)的SPI数据帧完成配置与数据读取。关键配置位如下:
* 启动位(Start Bit):逻辑高,标志通信开始。
* 模式选择位(SGL/DIFF):置1选择单端输入模式。
* 通道选择位(D2, D1, D0):三位二进制码,用于选择CH0-CH7中的某个通道。
因此,要读取指定通道(例如通道0),我们需要发送的控制字前几位为 0b00000110 (启动位=0,单端模式=1,通道选择=000)。在实际发送时,由于spi_transfer函数是8位的,我们需要将控制字拆分为多个字节发送,并考虑高位在前(MSB First)的顺序。
6.2 实现ADC数据读取函数
我们将编写一个函数mcp3208_read_channel,它接收通道号作为参数,通过SPI与MCP3208通信,返回12位的原始ADC值。
c
#include <reg52.h>
#include <intrins.h>
#include <stdio.h> // 用于串口输出
// 引脚定义(复用第3章定义)
sbit SPI_SCK = P1^0;
sbit SPI_MOSI = P1^1;
sbit SPI_MISO = P1^2;
sbit SPI_CS = P1^3; // MCP3208片选,复用W25Q_CS引脚
#define SPI_DELAY_VAL 2 // 延时值,控制SPI速率
#define ADC_VREF 3.3f // 假设ADC参考电压为3.3V
// 包含之前实现的SPI基础函数(此处省略,实际项目需包含)
// void spi_init(void);
// void spi_delay(void);
// uint8_t spi_transfer(uint8_t dat);
/**
* @brief 读取MCP3208指定通道的12位ADC原始值
* @param channel: 通道号 (0-7)
* @return 12位无符号整数 (0-4095)
*/
unsigned int mcp3208_read_channel(unsigned char channel)
{
unsigned char i;
unsigned int adc_value = 0;
unsigned char ctrl_byte;
// 构造控制字:起始位(1) + 单端模式(1) + 通道号(3位)。高位在前。
// 例如通道0: 0b(0)000(1)(1)(0) -> 实际起始位为下个字节的最高位。
// 第一个字节的后三位:SGL=1, D2=0, D1=0, D0=0
ctrl_byte = 0x06 | ((channel & 0x04) >> 2); // 处理D2位,置于字节最高位
// 后续字节的通道选择位(D1, D0)将放在第二个字节的最高两位
SPI_CS = 0; // 拉低片选,启动通信
spi_delay();
// 发送第一个字节(包含部分控制信息)
spi_transfer(ctrl_byte);
// 发送第二个字节(包含剩余通道选择位和占位的'x'位)
// channel的D1, D0位在ctrl_byte的下两位,我们将其移到第二个字节的最高两位
spi_transfer((channel & 0x03) << 6);
// 发送第三个字节(占位字节,同时接收数据的高4位)
unsigned char high_byte = spi_transfer(0x00); // 发送0,接收数据高4位
// 再发一个时钟,接收数据的低8位
unsigned char low_byte = spi_transfer(0x00);
SPI_CS = 1; // 拉高片选,结束通信
// 组合12位结果:高4位来自high_byte的低4位,低8位来自low_byte
adc_value = ((unsigned int)(high_byte & 0x0F) << 8) | low_byte;
return adc_value;
}代码解析:
- 控制字构造 :代码根据通道号,通过位操作拼接出符合MCP3208时序要求的控制字节。注意,
spi_transfer是同时发送和接收的,因此在发送控制字节的同时,我们也在获取返回的数据。 - 三次传输 :函数进行了三次
spi_transfer调用,对应时序图中的24个SCK周期。前两个字节发送完整的控制信息,第三个字节用于生成时钟以接收剩余的ADC数据。 - 数据重组 :返回的数据是12位,分布在两个接收到的字节中(
high_byte和low_byte),需要通过位移和按位或操作将其合并为一个整数。
6.3 电压采集与串口打印应用
结合串口功能,我们可以轻松实现一个电压测量仪。
c
// 串口初始化函数(省略实现,确保波特率正确)
void uart_init(void);
void main(void)
{
unsigned int adc_raw;
float voltage;
spi_init(); // 初始化SPI
uart_init(); // 初始化串口
printf("MCP3208 ADC Voltage Meter\r\n");
while(1)
{
// 读取通道0的ADC值
adc_raw = mcp3208_read_channel(0);
// 计算实际电压值:(ADC值 / 4096) * 参考电压
voltage = (float)adc_raw / 4096.0f * ADC_VREF;
// 通过串口打印结果
printf("ADC Raw: %u, Voltage: %.3fV\r\n", adc_raw, voltage);
// 简单延时
for(unsigned int j=0; j<50000; j++);
}
}硬件连接提示 :将MCP3208的CS、SCK、MOSI、MISO分别连接到单片机的P1.3、P1.0、P1.1、P1.2。将待测电压(例如0~3.3V)通过电位器分压后连接到CH0通道,确保电压不超过VREF。
本章展示了软件模拟SPI的高度灵活性,通过复用同一套底层驱动,我们轻松接入了完全不同的外设类型。这为后续驱动更多传感器或通信模块奠定了坚实基础。
7. 调试技巧与常见问题排查
当精心编写的SPI驱动无法与外设通信时,不要慌张。本章将系统介绍软件模拟SPI的调试方法与常见陷阱,帮助你快速定位故障。
7.1 逻辑分析仪的使用与波形分析
最有效的方法是使用逻辑分析仪抓取实际波形。 你可以清晰地看到SCK、MOSI、MISO和CS信号的时序关系。 
例如,在Mode 0下发送数据0xA5时,正确的波形应为:
- CS拉低后,SCK空闲为低。
- MOSI在每个SCK上升沿之前稳定输出数据位(先发MSB
1)。 - 在SCK下降沿,数据应被稳定采样。
如果捕获到的波形中,SCK的初始电平(极性)与模式要求不符,或者数据位在SCK上升沿之后才变化,就说明CPOL或CPHA配置错误 。此时应检查SPI_MODE的定义及对应的引脚操作时序。
7.2 软件模拟的常见错误与修正
1. 时序过快 :延时函数spi_delay的时间常数SPI_DELAY_VAL设置得太小,导致时钟频率超过外设允许的最大值(如W25Q通常支持80MHz,但软件模拟可能只有几百KHz)。
c
// 错误示例:延时过短,SCK频率过高
void spi_delay(void) {
// 如果SPI_DELAY_VAL设为0或1,循环体为空或太快
unsigned char i;
for(i=0; i<2; i++); // 延时值过小,应尝试增大此值
}修正 :适当增大SPI_DELAY_VAL的值,或在循环内插入_nop_()指令增加微小延时。
8. 性能优化与高级话题
在前面的章节中,我们成功实现了软件模拟SPI,并驱动了Flash、OLED和ADC等多种外设。然而,软件模拟的速度通常受限于函数调用开销和延时循环。本章将探讨如何优化其性能,并介绍一些进阶知识。
8.1 提高模拟SPI时钟频率
最直接的优化是减小SPI_DELAY_VAL,但受制于for循环和指令执行时间,存在下限。可以尝试以下方法:
- 减少函数调用 :将核心的
spi_transfer函数实现为宏,避免函数跳转开销。 - 使用
_nop_()精确延时 :_nop_()指令执行一个机器周期,能提供更精确的微小延时。 - 使用增强型51的推挽输出:经典51的准双向口翻转速度慢,且驱动能力弱。对于STC等增强型51,可将IO口配置为推挽模式,获得更快、更干净的边沿。
以下是一个结合了_nop_()的优化延时函数示例:
c
// 优化后的延时函数
void spi_delay(void) {
unsigned char i = SPI_DELAY_VAL;
while (i--) {
_nop_(); // 插入一个机器周期的延时
_nop_();
}
}9. 总结与进阶学习路径
9.1 知识体系回顾
经过前八个章节的系统学习,我们已经掌握了51单片机软件模拟SPI的完整知识体系。让我们用一个思维导图来串联所有关键点:
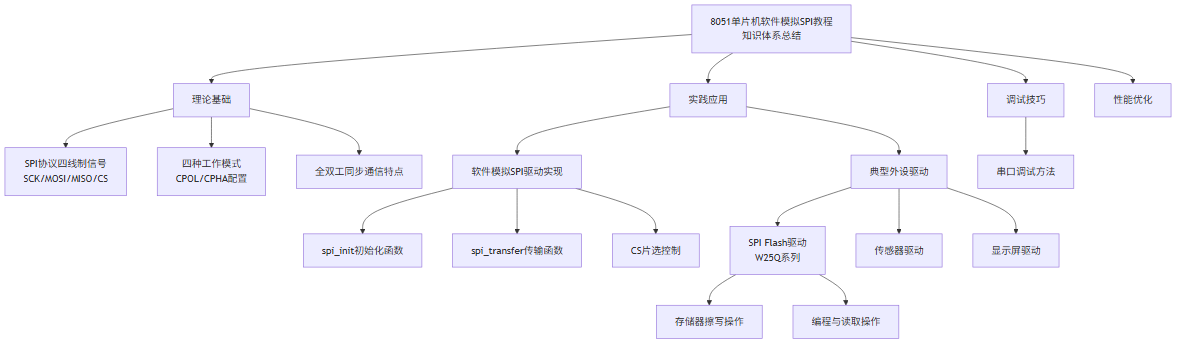 理论层面 :理解了SPI协议的四线制信号(SCK、MOSI、MISO、CS)、四种工作模式(由CPOL和CPHA决定)、全双工同步通信的特点。这些是正确实现软件模拟的基础。 实践层面 :实现了完整的软件模拟SPI驱动(
理论层面 :理解了SPI协议的四线制信号(SCK、MOSI、MISO、CS)、四种工作模式(由CPOL和CPHA决定)、全双工同步通信的特点。这些是正确实现软件模拟的基础。 实践层面 :实现了完整的软件模拟SPI驱动(spi_init, spi_transfer等),并成功驱动了三种典型外设:
-
SPI Flash(W25Q系列):掌握了存储芯片的擦写、编程、读取操作
-
OLED显示屏(SSD1306):学会了发送命令/数据、初始化序列、图形显示
-
高精度ADC(MCP3208):理解了ADC的配置字和数据读取流程
-
调试与优化 :掌握了使用逻辑分析仪验证时序、排查常见错误的方法,以及通过
_nop_()优化延时、使用推挽输出提升速度的技巧。9.2 迈向硬件SPI与更高级平台
软件模拟让我们深刻理解了SPI协议的本质,但在实际工程中,硬件SPI模块能带来显著优势:
9. 总结与进阶学习路径
至此,我们完成了从SPI协议原理到51单片机软件模拟实战的全部旅程。让我们回顾核心要点,并展望未来的学习方向。
9.1 知识体系回顾
本教程构建了一个完整的知识框架:
-
理论基础:掌握了SPI的四线制、四种工作模式(CPOL/CPHA),这是所有后续工作的基石。
-
软件实现 :通过
sbit定义引脚,利用spi_delay控制时序,成功编写了spi_init、spi_transfer等核心函数,证明了GPIO模拟的可行性。 -
外设驱动:实战中,我们运用基础函数驱动了三种典型外设:W25Q Flash(存储)、OLED(显示)、MCP3208(采集),理解了通用驱动编写方法。
-
调试与优化:学习了使用逻辑分析仪验证时序,并探讨了通过推挽输出、批量传输来提升模拟SPI的性能。
9.2 迈向硬件SPI与更高级平台
软件模拟让你深入理解了协议本质。当项目对速度和可靠性要求更高时,可以转向硬件SPI。
- 硬件SPI优势:由专用外设控制器自动完成位传输和时钟生成,CPU负载极低,速率可达数Mbps。
- 驱动编写异同 :硬件驱动不再需要
spi_transfer这样的位操作函数,转而配置相关SFR(特殊功能寄存器)并直接读写数据缓冲区,代码更简洁、效率更高。
9.3 学习资源与项目拓展建议
- 精读数据手册:任何新外设的驱动编写,首要任务是仔细阅读其数据手册的时序图与指令集。
- 参考开源项目:如Arduino的SPI库、STM32的HAL库,学习其分层设计和可移植性思想。
- 项目拓展想法:你可以尝试驱动其他SPI设备,例如:
-
无线模块:NRF24L01,实现无线数据传输。
-
传感器:MAX6675(热电偶放大器)、ADXL345(加速度计)。
-
音频DAC:VS1053,制作简易音乐播放器。
掌握软件模拟SPI,意味着你获得了驾驭任何SPI外设的钥匙。这份理解力将使你未来在使用任何单片机平台时都更加得心应手。祝你后续的嵌入式开发之旅顺利!