文章目录
-
- 摘要
- [I. 引言](#I. 引言)
- [II. 系统模型](#II. 系统模型)
-
- [A. 天线阵列与信号模型](#A. 天线阵列与信号模型)
- [B. 时分 ISAC 协议](#B. 时分 ISAC 协议)
-
- [1. 面向 OFDM 通信的波束管理](#1. 面向 OFDM 通信的波束管理)
- [2. 面向 OFDM 感知的单基地雷达](#2. 面向 OFDM 感知的单基地雷达)
- [C. 定位模型](#C. 定位模型)
- [D. 基于 RCS 的栅格地图模型](#D. 基于 RCS 的栅格地图模型)
- [III. 毫米波 ISAC-SLAM 框架](#III. 毫米波 ISAC-SLAM 框架)
-
- [A. OFDM 通信期间的定位与建图](#A. OFDM 通信期间的定位与建图)
-
- [1. LOS 与一阶 NLOS 提取](#1. LOS 与一阶 NLOS 提取)
- [2. 基于 EKF 的定位细化](#2. 基于 EKF 的定位细化)
- [3. 使用一阶 NLOS 的粗建图(Rough Mapping With 1st NLOS)](#3. 使用一阶 NLOS 的粗建图(Rough Mapping With 1st NLOS))
- [B. OFDM 感知期间的精细建图](#B. OFDM 感知期间的精细建图)
- [C. 全局地图拼接](#C. 全局地图拼接)
- [IV. 原型系统设计](#IV. 原型系统设计)
- [V. 实验结果](#V. 实验结果)
-
- [A. 实验设置](#A. 实验设置)
-
- [1. 场景描述](#1. 场景描述)
- [2. 原型设置](#2. 原型设置)
- [3. 系统参数](#3. 系统参数)
- [B. OFDM 通信期间的定位与建图](#B. OFDM 通信期间的定位与建图)
- [C. OFDM 感知期间的精细建图](#C. OFDM 感知期间的精细建图)
- [D. 全局地图拼接](#D. 全局地图拼接)
- [VI. 结论](#VI. 结论)
- 参考文献
- 作者简介
摘要
本文建立了一个基于 Xilinx RFSoC 的毫米波(mmWave)感知与通信一体化同步定位与建图(integrated sensing and communication simultaneous localization and mapping, ISAC-SLAM)完整框架,并给出了真实世界原型。该 ISAC-SLAM 框架采用时分协议,使用户在通信和感知之间交替工作。
- 在通信阶段,用户与基站(base station, BS)执行波束管理,从中分别提取视距(line-of-sight, LOS)路径和一阶非视距(first-order non-line-of-sight, 1st NLOS)路径,用于粗略用户定位和地图重建。进一步地,本文设计了一种融合用户粗略位置、惯性测量单元(inertial measurement unit, IMU)和轮式编码器测量的算法,以实现精确定位。
- 在感知阶段,本文提出精细的信号处理基带,使用户能够作为单基地正交频分复用(orthogonal frequency division multiplexing, OFDM)雷达工作并细化地图。
- 最后,本文设计了地图拼接方法(a map stitching method),使多个用户和基站能够协作生成大尺度地图。
- 不同于多数传统工作,本文提出基于雷达散射截面(radar cross section, RCS)的栅格地图(RCS-based grid map),用来同时表示环境轮廓和材料信息(contour and material of the environment),并在 RFSoC 上实现了具有高鲁棒性和实时实用性的 ISAC-SLAM 原型。实验表明,ISAC-SLAM 的定位平均绝对误差为 0.0347 m,建图平均绝对误差为 0.2610 m,同时保持超过 1 Gbps 的实时数据传输。此外,ISAC-SLAM 地图在大尺度上呈现出与 2D LiDAR 地图相似的轮廓,并包含环境材料信息。
索引词:ISAC;通信 SLAM;RFSoC 原型;毫米波通信。
I. 引言
感知与通信一体化(ISAC)被认为是第六代(6G)通信系统的关键特征之一 1。ISAC 的本质是在同一套波形、射频(radio-frequency, RF)系统和硬件结构上同时实现通信与感知功能。因此,ISAC 技术能够显著降低硬件开销、能耗和部署复杂度,从而使通信网络中的感知应用成为可能,例如用户设备(user equipment, UE)定位和环境重建 2。UE 定位和环境重建合在一起就是同步定位与建图(SLAM),它是机器人智能与自动化的重要支柱 3-5。凭借 ISAC 的高分辨率感知能力,使用 ISAC 技术的 SLAM(ISAC-SLAM)可以把通信设备直接作为 SLAM 传感器,而无需额外使用昂贵的 LiDAR 或摄像头 6-25。虽然基于 LiDAR 和摄像头的 SLAM 能够生成精细的 2D/3D 地图,并准确估计位置和姿态 26-31,但 ISAC-SLAM 具有独特优势。
ISAC-SLAM 的一个内在特点是多个基站与多个用户之间可以交互,借此能够实现大尺度全局环境重建。同时,利用无线电波的 SLAM 在多种天气和光照条件下能保持相对稳定的性能,例如雨、雪、雾等条件,而在这些条件下 LiDAR 和摄像头 SLAM 的性能会显著下降。所提出 ISAC-SLAM 的潜在应用非常广泛,包括提升复杂环境中手机用户的导航精度,以及在多种天气条件下、或没有摄像头/LiDAR 的情况下,利用通信设备完成城市尺度的多车辆、多行人协作建图。
根据基础框架,现有 ISAC-SLAM 研究可以分为两类:雷达驱动方法和通信驱动方法。
- 雷达驱动方法中,通信收发机通过时分复用等方式被同时用作单基地雷达,ISAC-SLAM 通过通信信号的自发自收来实现 6-13。在毫米波频段,7、8 使用压缩感知方法构建距离-角度(range-angle, RA)图,并采用扩展卡尔曼滤波(extended Kalman filter, EKF)进行环境重建;10-13 引入考虑每个栅格 RCS 值的状态空间模型,提出基于栅格的贝叶斯建图方法。9 将 5G NR 标准中的多个频率信道拼接起来,用 GHz 级带宽 OFDM 信号实现成像与建图。在太赫兹(THz)频段,6 提出了一种基于 Fourier-Mellin 变换的新型 SLAM 算法。实验表明,雷达驱动方法的建图精度基本与带宽所限制的距离分辨率处于同一数量级。不过,尽管雷达驱动方法精度很高,它们通常不考虑基站与用户之间的通信和交互。因此,多基站、多用户协作 ISAC-SLAM 的优势无法充分发挥,建图最大范围也受限于单个用户的探测范围。
- 另一方面,通信驱动方法利用基站与用户之间通信信道中的多径分量,其思想类似于使用通信信号的双基地雷达。在毫米波和太赫兹等高频频段,多径分量大多由镜面反射(specular reflection)生成,因此可利用多径分量的几何特征估计环境地图、基站位置和用户位置 14-25、32、33。
- 在 14 和 15 中,作者设计链路状态分类神经网络,将路径分为 LOS、一阶 NLOS 和高阶 NLOS,再由一阶 NLOS 路径推导反射点作为环境地图。虽然这些工作简洁地利用了镜面反射的几何性质进行导航和建图,但神经网络泛化能力较弱,实际落地困难。为了提高实用性,多数通信驱动方法把环境表示为一组简单地标,包括基站和关于反射平面对称的虚拟基站,并使用到达角(AoA)、离开角(AoD)、到达时间(ToA)和接收信号强度(RSS)等多径特征估计基站、虚拟基站和用户位置。
- 在 16、17、20-23 中,AoA、AoD、ToA 与 RSS 被提取用于 ISAC-SLAM。
- 然而,这些方法受限于精确 ToA 所需的严格时间同步,以及 RSS 测量的低鲁棒性。为避免精确 ToA 和 RSS 获取困难,18、19、24、25 只利用角度特征完成 SLAM,并进行了真实实现。
- 通信驱动方法通常不改变 5G NR 协议中的通信流程,并充分利用多个基站和用户之间的协作,因此一般能够在较大区域内重建地图。不过,由于高频频段多径稀疏,且仅依靠少量地标的地图模型过于简单,通信驱动方法在真实世界中的定位精度和地图分辨率并不令人满意。
综上,雷达驱动 ISAC-SLAM 能提供较高定位精度和地图分辨率,但无法兼顾用户通信需求,也不能利用通信系统中多用户、多基站协作的优势。通信驱动 ISAC-SLAM 不额外占用通信资源,却受限于多径稀疏性和地标地图模型能力,表现较差。特别是在已有硬件实验的工作中,硬件平台大多采用 USRP 或频谱分析仪方案。USRP 的带宽限制和较高信号处理时延阻碍了宽带信号 ISAC-SLAM 演示;频谱分析仪天然缺少实时信号处理基带,无法满足 ISAC-SLAM 的实时要求,也无法验证 ISAC-SLAM 算法在真实世界中的实用性。
注:
- 本文这里明确对比的是 RFSoC 原型与 USRP、频谱分析仪等既有实验平台:USRP 主要受带宽和处理时延限制,频谱分析仪缺少实时信号处理基带;RFSoC 的优势是可在 FPGA/SoC 上实时实现 OFDM 通信与感知基带,并共享同一毫米波 RF 链路。
- 因此,论文强调的是 RFSoC 作为实时 ISAC-SLAM 原型平台的优势,并非对 RFSoC 与商用毫米波芯片/常规毫米波设备做完整横向比较。
本文提出一种新的毫米波 ISAC-SLAM 框架和真实世界 RFSoC 原型。不同于既有 ISAC-SLAM 框架 32、33,本文通过时分 ISAC 协议(leveraging time-division ISAC protocol)融合通信驱动和雷达驱动 ISAC-SLAM,使系统在保持通信的同时,在大尺度区域内实现精确定位和高分辨率地图重建。本文主要贡献如下。
- 建立毫米波 ISAC-SLAM 框架。该框架采用时分 ISAC 协议,使用户在 OFDM 通信和感知之间交替工作。
- 通信阶段,用户基于波束管理与基站通信。本文提出算法,通过分析每个波束的功率提取 LOS 和一阶 NLOS 路径。利用 LOS 路径实现粗略用户定位,并设计 EKF 融合 IMU 和轮式编码器测量以提升精度。本文提出 RCS 栅格地图,用于同时表示环境轮廓和材料信息,并利用一阶 NLOS 路径重建粗地图。
- 感知阶段,用户作为单基地 OFDM 雷达工作。本文提出带滤波和功率补偿的信号处理基带,获得细化 RA 图(refined RA charts),避免噪声和衰减造成的失真,并基于 RA 图设计地图重建算法细化粗地图。最后,本文设计拼接算法,融合所有用户的细化地图,构建大尺度 RCS 栅格地图。
- 构建紧凑型 ISAC-SLAM RFSoC 原型。该原型包括 Xilinx RFSoC 和计算机。在 Xilinx RFSoC 中,本文把时分 OFDM 通信与感知信号处理基带实现到同一个 FPGA 处理器中,并共享同一毫米波 RF 链路。在计算机中,本文基于机器人操作系统(Robot Operating System,ROS)34 部署并行多传感器数据采集和 SLAM 框架(a parallel multi-sensor data-acquisition and SLAM framework),其中来自 RFSoC 的 OFDM ISAC 基带结果与 IMU、轮式编码器测量融合,实现实时、低时延 ISAC-SLAM。
- 在多个复杂室内场景中对 ISAC-SLAM 原型进行全面评估与演示。实验结果表明,所提出原型可达到与 2D LiDAR Cartographer SLAM 27 相近的地图重建性能。定位和建图平均绝对误差分别为 0.0347 m 和 0.2610 m,接近带宽所限制的最细建图分辨率。此外,构建的 RCS 栅格地图(the constructed RCS-based grid map)能够清晰区分环境中的金属和其他材料。在 ISAC-SLAM 过程中,用户稳健地维持超过 1 Gbps 的实时数据传输,验证了 ISAC-SLAM 在通信与感知两方面的有效性。
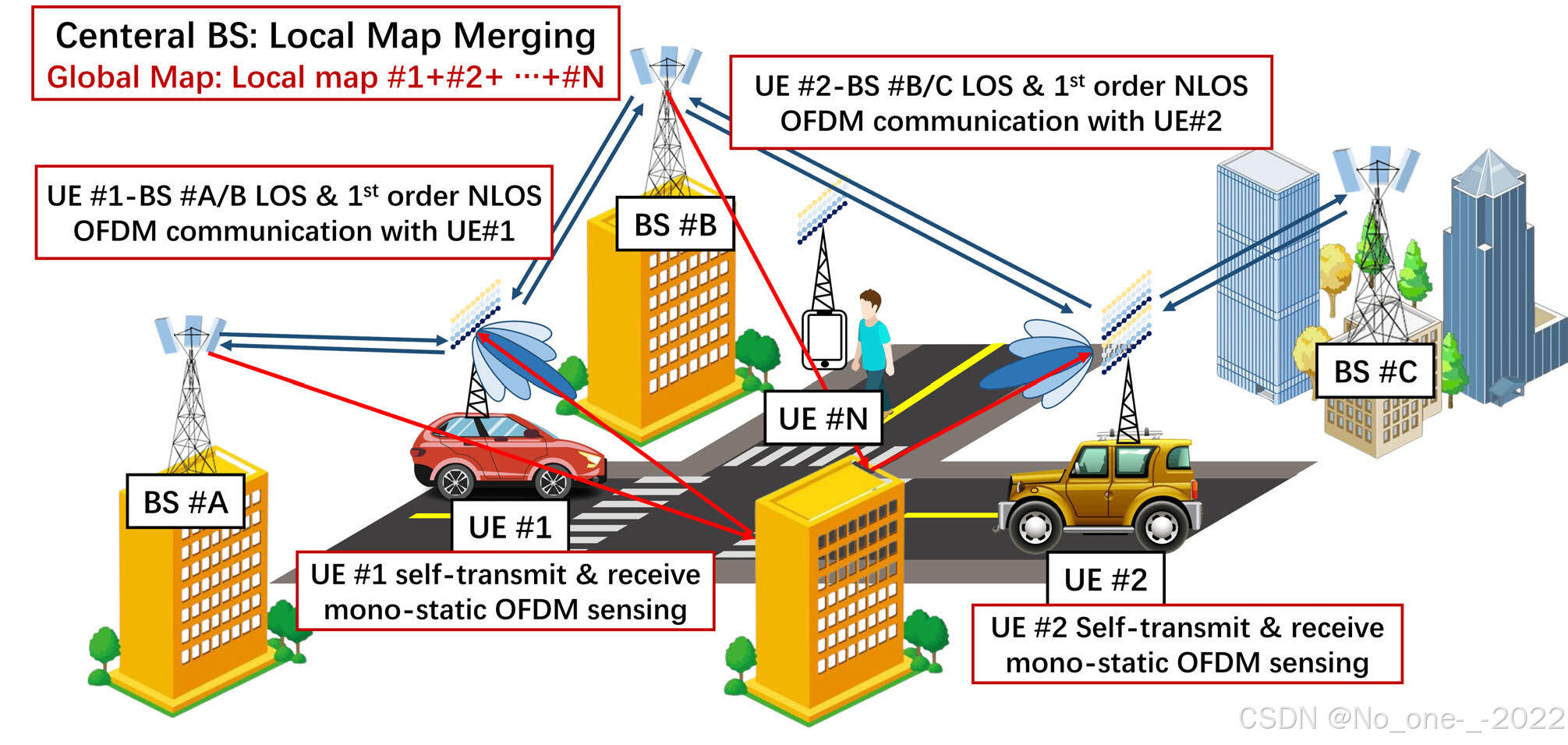
图 1. 本文考虑的 OFDM 毫米波 ISAC 场景,以及所提出 ISAC-SLAM 框架的总体模型。每个 UE 均可执行 OFDM 通信和感知,从而实现 ISAC-SLAM。
本文结构如下:第二节给出 OFDM 信号、时分 ISAC 协议、定位和 RCS 栅格地图模型;第三节描述所提出的毫米波 ISAC-SLAM 框架;第四节详细介绍原型系统实现;第五节分析实验结果;第六节总结全文。
记号约定: x x x 表示标量, x \mathbf{x} x 表示向量, X \mathbf{X} X 表示矩阵, X \mathcal{X} X 表示集合; X ; Y \\mathbf{X};\\mathbf{Y} X;Y 和 X , Y \\mathbf{X},\\mathbf{Y} X,Y 分别表示矩阵按行维度和按列维度拼接。
II. 系统模型
如图 1 所示,本文考虑具有多个静止基站和移动用户的 OFDM 毫米波 ISAC 场景。每个用户在其探测范围内构建环境局部地图,中央基站通过融合所有用户上传的局部地图形成全局地图。具体而言,用户可以通过波束管理进行通信,也可以通过自发自收进行感知。同时,每个用户始终具备与至少两个基站建立下行 LOS 连接的能力。由于毫米波通信高度依赖 LOS 路径,已有许多研究提出每个用户应保持与多个基站的 LOS 连接,以提高信道容量并避免 LOS 路径遮挡导致的中断 35-37。考虑真实使用场景,每个用户还配备 IMU 和轮式编码器,用于辅助精确定位。为简化 ISAC-SLAM 系统,本文只考虑 2D ISAC-SLAM 场景,因此在水平面上建立天线阵列和信号模型。
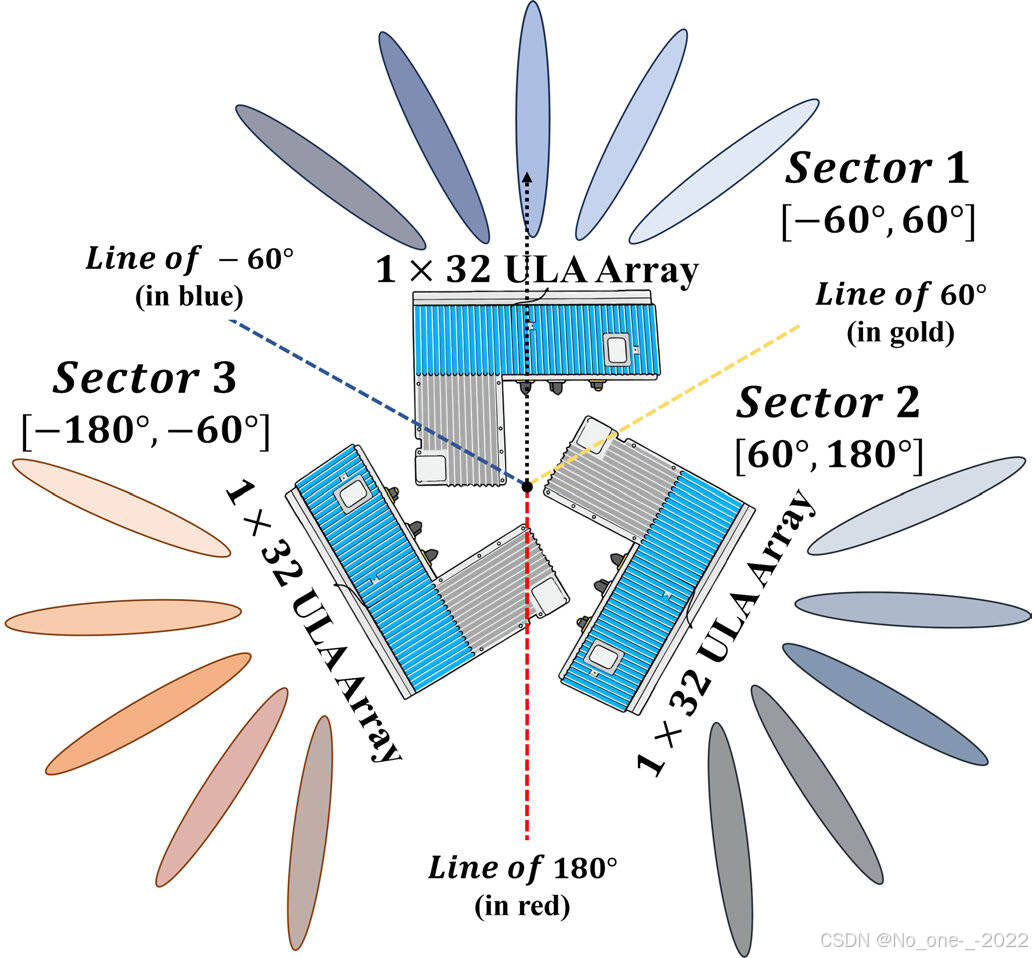
图 2. 基站和 UE 处天线阵列的俯视理论布局。由于一个 ULA 天线只能覆盖 120° 范围,采用三扇区部署以实现 360° 覆盖。
A. 天线阵列与信号模型
水平面的全向覆盖对基站和 UE 都至关重要。在 5G 系统中,这通常通过组合多个天线阵列实现,每个天线阵列覆盖特定角度范围 38。本文采用图 2 所示的俯视布局实现全向覆盖。在基站和 UE 处均采用三组 32 × 1 32 \times 1 32×1 毫米波均匀线阵(uniform linear array, ULA),并使用全模拟波束成形,每组 ULA 提供 ± 60 ∘ \pm 60^\circ ±60∘ 覆盖。所提布局是实际 5G 系统中的标准扇区化方法,也称三扇区布局 39、40,每个 ± 60 ∘ \pm 60^\circ ±60∘ 覆盖区域称为一个扇区。
在每个扇区中,基站和 UE 都设置一条 RF 链路,该链路使用全模拟波束成形 ULA 天线收发 OFDM 信号。令接收和发射 ULA 的天线阵元数分别为 N a n t r x N_{\mathrm{ant}}^{\mathrm{rx}} Nantrx 和 N a n t t x N_{\mathrm{ant}}^{\mathrm{tx}} Nanttx,本文中 N a n t r x = N a n t t x = 32 N_{\mathrm{ant}}^{\mathrm{rx}}=N_{\mathrm{ant}}^{\mathrm{tx}}=32 Nantrx=Nanttx=32。通信信号模型可表示为
r k = f r H H k f t s k + n k , (1) r_k=\mathbf{f}_r^{H}\mathbf{H}_k\mathbf{f}_t s_k+n_k , \tag{1} rk=frHHkftsk+nk,(1)
其中 r k , s k ∈ C r_k,s_k\in\mathbb{C} rk,sk∈C, H k ∈ C N a n t r x × N a n t t x \mathbf{H}k\in\mathbb{C}^{N{\mathrm{ant}}^{\mathrm{rx}}\times N_{\mathrm{ant}}^{\mathrm{tx}}} Hk∈CNantrx×Nanttx, n k ∼ C N ( 0 , ν 2 ) n_k\sim \mathcal{CN}(0,\nu^2) nk∼CN(0,ν2),分别为第 k k k 个 OFDM 子载波上的接收复信号、发射复信号、信道矩阵和高斯噪声。此外, f r ∈ C N a n t r x × 1 \mathbf{f}r\in\mathbb{C}^{N{\mathrm{ant}}^{\mathrm{rx}}\times 1} fr∈CNantrx×1 与 f t ∈ C N a n t t x × 1 \mathbf{f}t\in\mathbb{C}^{N{\mathrm{ant}}^{\mathrm{tx}}\times 1} ft∈CNanttx×1 为接收与发射波束成形向量。 f r \mathbf{f}r fr 和 f t \mathbf{f}t ft 分别从接收码本 R X U L A \mathrm{RX}{\mathrm{ULA}} RXULA 和发射码本 T X U L A \mathrm{TX}{\mathrm{ULA}} TXULA 中选取。本文所有 ULA 天线均使用 DFT 码本。若接收和发射码本大小分别为 N d i r r x N_{\mathrm{dir}}^{\mathrm{rx}} Ndirrx 与 N d i r t x N_{\mathrm{dir}}^{\mathrm{tx}} Ndirtx,本文均取 31,按 Δ Ψ = 4 ∘ \Delta\Psi=4^\circ ΔΨ=4∘ 的间隔均匀覆盖 ± 60 ∘ \pm 60^\circ ±60∘。
对 T X U L A \mathrm{TX}{\mathrm{ULA}} TXULA 中第 i t x i{\mathrm{tx}} itx 个波束,发射波束成形向量为
f t ( θ i t x ) = 1 , e − j π sin θ i t x , e − 2 j π sin θ i t x , ... , e − ( N a n t t x − 1 ) j π sin θ i t x T , θ i t x = ( i t x − ⌊ N d i r t x 2 ⌋ ) Δ Ψ , i t x ∈ { 0 , 1 , 2 , ... , N d i r t x − 1 } . (2) \begin{aligned} \mathbf{f}t(\theta{i_{\mathrm{tx}}}) &=\left1,e\^{-j\\pi\\sin\\theta_{i_{\\mathrm{tx}}}},e\^{-2j\\pi\\sin\\theta_{i_{\\mathrm{tx}}}},\\ldots, e\^{-(N_{\\mathrm{ant}}\^{\\mathrm{tx}}-1)j\\pi\\sin\\theta_{i_{\\mathrm{tx}}}}\\right^T,\\ \theta_{i_{\mathrm{tx}}} &=\left(i_{\mathrm{tx}}-\left\lfloor\frac{N_{\mathrm{dir}}^{\mathrm{tx}}}{2}\right\rfloor\right)\Delta\Psi,\quad i_{\mathrm{tx}}\in\{0,1,2,\ldots,N_{\mathrm{dir}}^{\mathrm{tx}}-1\}. \end{aligned} \tag{2} ft(θitx)θitx=1,e−jπsinθitx,e−2jπsinθitx,...,e−(Nanttx−1)jπsinθitxT,=(itx−⌊2Ndirtx⌋)ΔΨ,itx∈{0,1,2,...,Ndirtx−1}.(2)
这里 i t x i_{\mathrm{tx}} itx 也称为 TX 码本索引,每个 TX 码本索引对应一个 TX 波束方向。类似地,对 R X U L A \mathrm{RX}{\mathrm{ULA}} RXULA 中第 i r x i{\mathrm{rx}} irx 个波束,接收波束成形向量为
f r ( θ i r x ) = 1 , e − j π sin θ i r x , e − 2 j π sin θ i r x , ... , e − ( N a n t r x − 1 ) j π sin θ i r x T , θ i r x = ( i r x − ⌊ N d i r r x 2 ⌋ ) Δ Ψ , i r x ∈ { 0 , 1 , 2 , ... , N d i r r x − 1 } . (3) \begin{aligned} \mathbf{f}r(\theta{i_{\mathrm{rx}}}) &=\left1,e\^{-j\\pi\\sin\\theta_{i_{\\mathrm{rx}}}},e\^{-2j\\pi\\sin\\theta_{i_{\\mathrm{rx}}}},\\ldots, e\^{-(N_{\\mathrm{ant}}\^{\\mathrm{rx}}-1)j\\pi\\sin\\theta_{i_{\\mathrm{rx}}}}\\right^T,\\ \theta_{i_{\mathrm{rx}}} &=\left(i_{\mathrm{rx}}-\left\lfloor\frac{N_{\mathrm{dir}}^{\mathrm{rx}}}{2}\right\rfloor\right)\Delta\Psi,\quad i_{\mathrm{rx}}\in\{0,1,2,\ldots,N_{\mathrm{dir}}^{\mathrm{rx}}-1\}. \end{aligned} \tag{3} fr(θirx)θirx=1,e−jπsinθirx,e−2jπsinθirx,...,e−(Nantrx−1)jπsinθirxT,=(irx−⌊2Ndirrx⌋)ΔΨ,irx∈{0,1,2,...,Ndirrx−1}.(3)
i r x i_{\mathrm{rx}} irx 称为 RX 码本索引,每个 RX 码本索引对应一个 RX 波束方向。本文 ULA 天线半功率波束宽度为 3 ∘ 3^\circ 3∘。
毫米波通信信道 H k \mathbf{H}_k Hk 可由几何信道模型 41 描述为
H k = ∑ n = 0 N − 1 ∑ l = 1 L α l e − j 2 π k K n d ( n T s − τ l ) a r ( ϕ l r x ) a t H ( ϕ l t x ) , (4) \mathbf{H}k= \sum{n=0}^{N-1}\sum_{l=1}^{L} \alpha_l e^{-j\frac{2\pi k}{K}n} d(nT_s-\tau_l)\mathbf{a}_r(\phi_l^{\mathrm{rx}}) \mathbf{a}_t^{H}(\phi_l^{\mathrm{tx}}), \tag{4} Hk=n=0∑N−1l=1∑Lαle−jK2πknd(nTs−τl)ar(ϕlrx)atH(ϕltx),(4)
其中 L L L 表示多径数量, K K K 为子载波数量, N N N 为循环前缀长度, T s T_s Ts 为采样间隔; α l \alpha_l αl、 τ l \tau_l τl、 ϕ l r x \phi_l^{\mathrm{rx}} ϕlrx 与 ϕ l t x \phi_l^{\mathrm{tx}} ϕltx 分别表示第 l l l 条路径的增益、ToA、AoA 与 AoD; a r ( ⋅ ) ∈ C N a n t r x × 1 \mathbf{a}r(\cdot)\in\mathbb{C}^{N{\mathrm{ant}}^{\mathrm{rx}}\times 1} ar(⋅)∈CNantrx×1 和 a t ( ⋅ ) ∈ C N a n t t x × 1 \mathbf{a}t(\cdot)\in\mathbb{C}^{N{\mathrm{ant}}^{\mathrm{tx}}\times 1} at(⋅)∈CNanttx×1 分别是接收和发射 ULA 的波束导向向量; d ( ⋅ ) d(\cdot) d(⋅) 表示脉冲成形滤波器。注意,与环境相关的全部信息都包含在信道矩阵中。
B. 时分 ISAC 协议
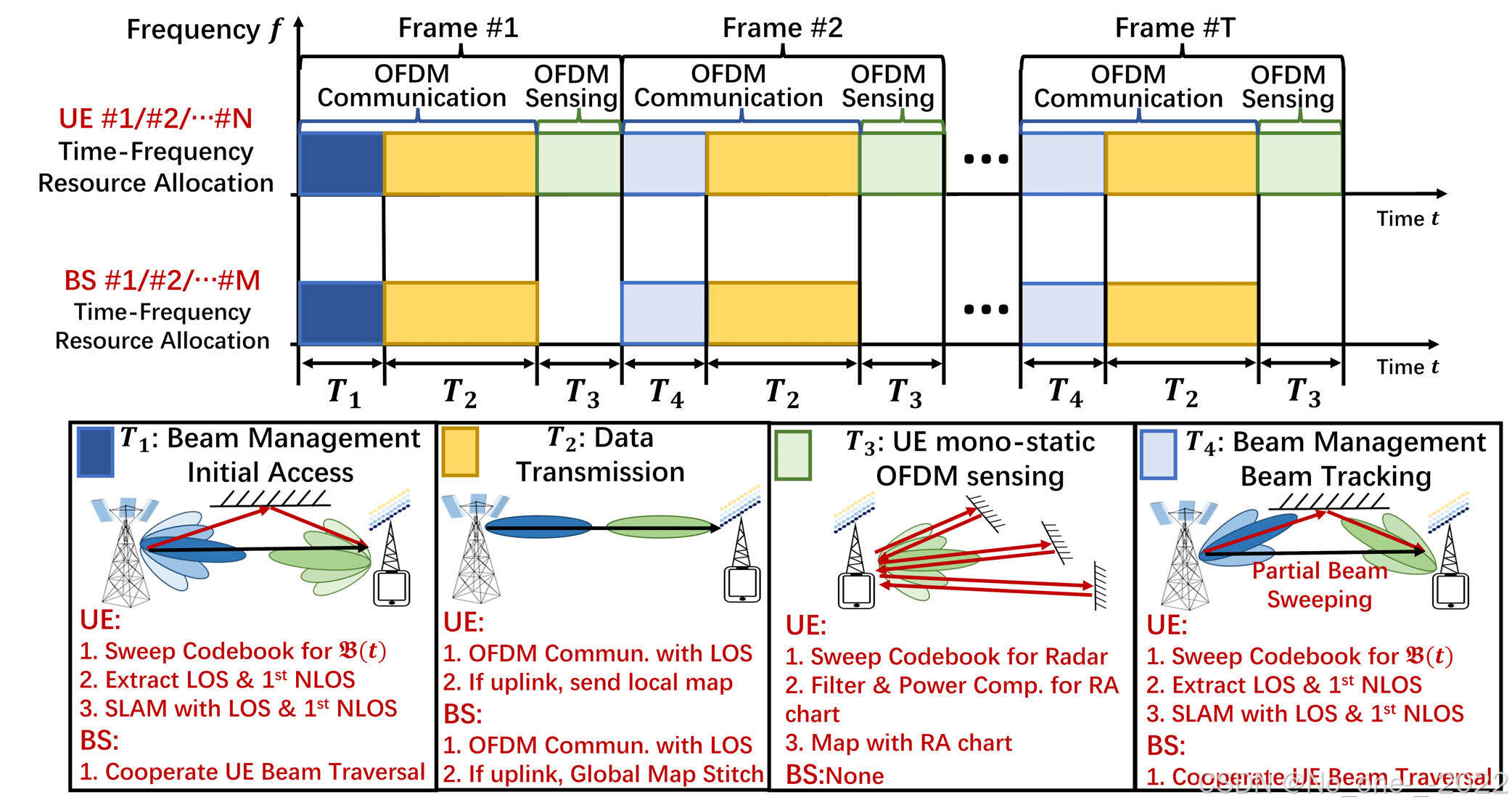
图 3. ISAC-SLAM 框架采用的时分 ISAC 协议。每帧被分成两个阶段:OFDM 通信和 OFDM 感知。
所提出的时分 ISAC 协议如图 3 所示,每一帧分成通信阶段和感知阶段。通信阶段中,用户与基站协作执行波束管理,然后传输业务数据;感知阶段中,用户作为单基地雷达工作,即用户在所有方向上发射并接收 OFDM 信号,以生成 RA 图。
1. 面向 OFDM 通信的波束管理
对于使用窄波束的毫米波通信,需要精细波束管理。为避免干扰数据传输,本文考虑 5G NR 协议 42 中规定的下行波束管理流程。波束管理的目标是建立并维护具有最大增益的一组最优波束对。波束管理分为两种模式,即初始接入和波束跟踪。当尚未形成最优波束对集合时,系统激活初始接入。基站和用户协作遍历发射与接收码本中的全部波束,用户对每个波束对执行参考信号接收功率(reference signals received power, RSRP)测量。初始接入时,若以 f t ( θ i t x ) \mathbf{f}t(\theta{i_{\mathrm{tx}}}) ft(θitx) 和 f r ( θ i r x ) \mathbf{f}r(\theta{i_{\mathrm{rx}}}) fr(θirx) 表示待测的发射与接收波束成形向量,则波束对 ( θ i t x , θ i r x ) (\theta_{i_{\mathrm{tx}}},\theta_{i_{\mathrm{rx}}}) (θitx,θirx) 的 RSRP 可写为
p ( θ i t x , θ i r x ) = 1 N c ∑ k = 0 N c ∣ r k ( i t x , i r x ) ∣ 2 , (5) p(\theta_{i_{\mathrm{tx}}},\theta_{i_{\mathrm{rx}}}) =\frac{1}{N_c}\sum_{k=0}^{N_c}\left|r_k^{(i_{\mathrm{tx}},i_{\mathrm{rx}})}\right|^2, \tag{5} p(θitx,θirx)=Nc1k=0∑Nc rk(itx,irx) 2,(5)
r k ( i t x , i r x ) = f r H ( θ i r x ) H k f t ( θ i t x ) s k + n k , (6) r_k^{(i_{\mathrm{tx}},i_{\mathrm{rx}})} =\mathbf{f}r^{H}(\theta{i_{\mathrm{rx}}}) \mathbf{H}k \mathbf{f}t(\theta{i{\mathrm{tx}}})s_k+n_k, \tag{6} rk(itx,irx)=frH(θirx)Hkft(θitx)sk+nk,(6)
其中 N c N_c Nc 表示参考信号中的子载波数量。遍历接收和发射码本即可得到所有 RSRP 测量构成的矩阵
P = p ( θ i t x , θ i r x ) ( i t x , i r x ) ∈ R N d i r t x × N d i r r x . (7) \mathbf{P}=p(\\theta_{i_{\\mathrm{tx}}},\\theta_{i_{\\mathrm{rx}}}){(i{\mathrm{tx}},i_{\mathrm{rx}})} \in\mathbb{R}^{N_{\mathrm{dir}}^{\mathrm{tx}}\times N_{\mathrm{dir}}^{\mathrm{rx}}}. \tag{7} P=p(θitx,θirx)(itx,irx)∈RNdirtx×Ndirrx.(7)
初始接入后,系统从 P \mathbf{P} P 中提取 RSRP 最高的前 K K K 个波束对,建立一组最优波束对。为了维护该集合,系统激活波束跟踪。基站和用户探测邻近波束,并根据探测结果微调最优集合,从而实现波束跟踪和细化。简言之,系统通过波束管理获得并维护最优波束对集合。若记第 i i i 个最优波束对为 b i b_i bi,则 b i b_i bi 以及时刻 t t t 的集合可表示为
b i = ( θ ^ i t x , θ ^ i r x , P ^ θ ^ i t x , θ ^ i r x ) , (8) b_i=\left(\hat{\theta}_i^{\mathrm{tx}},\hat{\theta}i^{\mathrm{rx}}, \hat{P}{\hat{\theta}_i^{\mathrm{tx}},\hat{\theta}_i^{\mathrm{rx}}}\right), \tag{8} bi=(θ^itx,θ^irx,P^θ^itx,θ^irx),(8)
B ( t ) = { b 1 , b 2 , ... , b K ( t ) } . (9) \mathcal{B}(t)=\{b_1,b_2,\ldots,b_{K(t)}\}. \tag{9} B(t)={b1,b2,...,bK(t)}.(9)
其中 θ ^ i t x \hat{\theta}_i^{\mathrm{tx}} θ^itx 和 θ ^ i r x \hat{\theta}i^{\mathrm{rx}} θ^irx 是集合中产生第 i i i 高 RSRP 的发射和接收波束方向, P ^ θ ^ i t x , θ ^ i r x \hat{P}{\hat{\theta}_i^{\mathrm{tx}},\hat{\theta}_i^{\mathrm{rx}}} P^θ^itx,θ^irx 为对应 RSRP, K ( t ) K(t) K(t) 是时刻 t t t 集合中的波束对数量。由于假设每个用户始终具备与至少两个基站建立 LOS 连接的能力,LOS 路径始终包含在 B ( t ) \mathcal{B}(t) B(t) 中。此外, B ( t ) \mathcal{B}(t) B(t) 中的一阶 NLOS 路径可以用于推导用户与基站之间的反射平面,进而重建环境粗地图。
2. 面向 OFDM 感知的单基地雷达
在 OFDM 感知阶段,用户侧的发射和接收毫米波 ULA 天线可以协作形成单基地 OFDM 雷达收发机。如果把 OFDM 单基地感知过程的单位冲激响应与式 (4) 中的 OFDM 通信信道类比,则对第 l l l 个回波,AoA ϕ l r \phi_l^r ϕlr 与 AoD ϕ l t \phi_l^t ϕlt 表示第 l l l 个散射体的角度位置。需要注意,在单基地模式下二者相同,即 ϕ l r = ϕ l t = ϕ l \phi_l^r=\phi_l^t=\phi_l ϕlr=ϕlt=ϕl。同时,第 l l l 个回波的时延可表示为 τ l = 2 R l / c \tau_l=2R_l/c τl=2Rl/c,其中 R l R_l Rl 是收发机与第 l l l 个散射体之间的距离。此外,信道矩阵中的 α l \alpha_l αl 表示路径增益,与传播衰减和第 l l l 个散射体的 RCS 紧密相关。由于某个散射体的 RCS 值会随入射波束模式变化且难以描述,本文用 σ l \sigma_l σl 表示第 l l l 个散射体的最大 RCS。OFDM 感知的目标是以 RA 图的形式精细估计所有 ( ϕ l , R l , σ l ) (\phi_l,R_l,\sigma_l) (ϕl,Rl,σl)。OFDM 感知可通过遍历码本中的全部波束完成。由于本文采用天线数量相同的全模拟 ULA 天线,在探测第 i i i 个波束方向时,发射和接收 ULA 使用相同的波束成形向量 f i \mathbf{f}_i fi 收发信号。
C. 定位模型
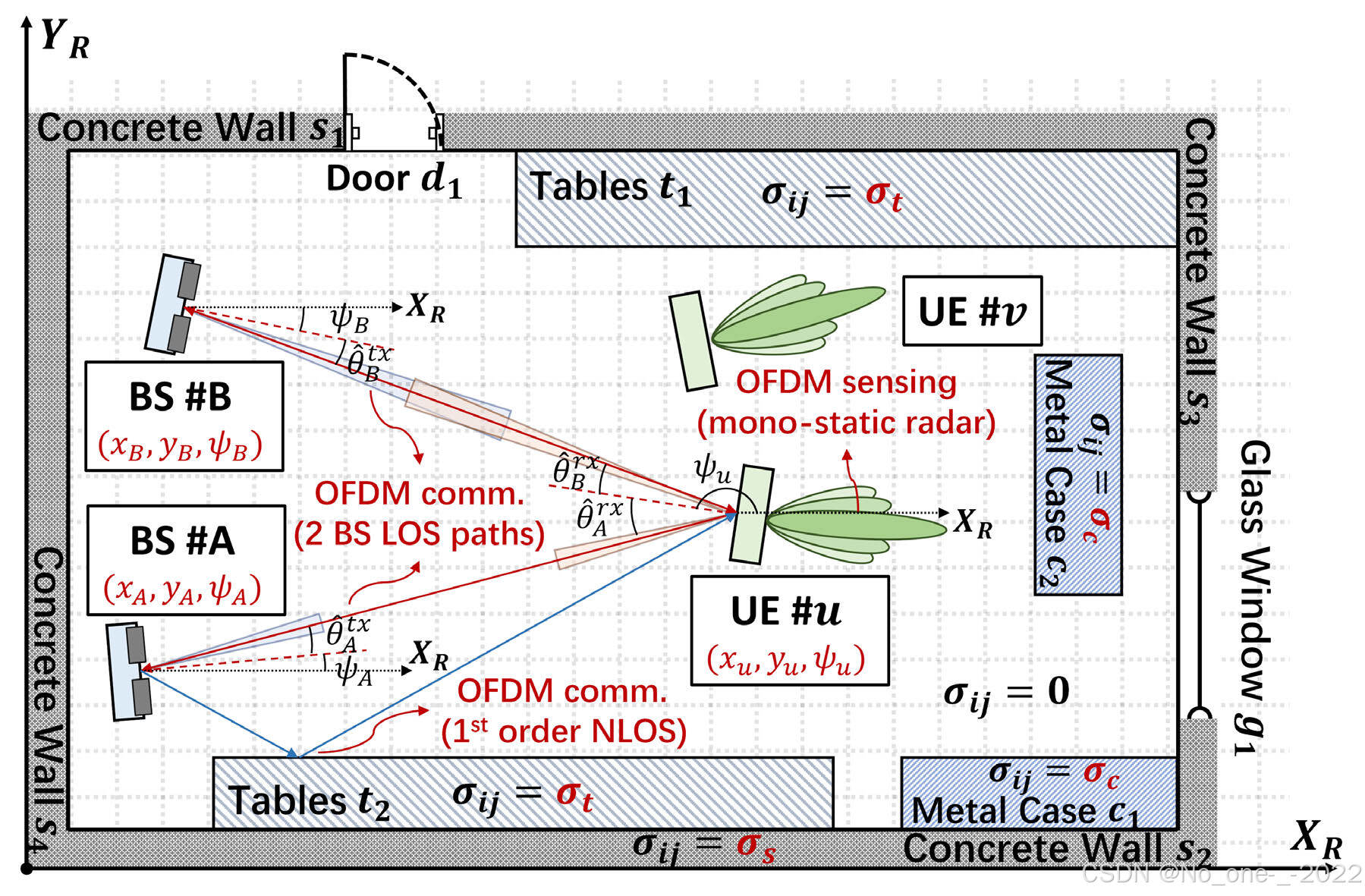
图 4. 本文中的定位模型和基于 RCS 的栅格地图模型。
定位和建图模型如图 4 所示。用户 u u u 始终保持与基站 #A 和 #B 的 LOS 连接。基站 #A 和 #B 的位置及法向方向作为先验已知,分别记为 ( x A , y A , ψ A ) (x_A,y_A,\psi_A) (xA,yA,ψA) 和 ( x B , y B , ψ B ) (x_B,y_B,\psi_B) (xB,yB,ψB)。若用户 u u u 与两个基站之间两条 LOS 路径的 AoA、AoD 与 RSRP 分别表示为 ( θ ^ A t x , θ ^ A r x , P ^ θ ^ A t x , θ ^ A r x ) (\hat{\theta}_A^{\mathrm{tx}},\hat{\theta}A^{\mathrm{rx}},\hat{P}{\hat{\theta}_A^{\mathrm{tx}},\hat{\theta}_A^{\mathrm{rx}}}) (θ^Atx,θ^Arx,P^θ^Atx,θ^Arx) 和 ( θ ^ B t x , θ ^ B r x , P ^ θ ^ B t x , θ ^ B r x ) (\hat{\theta}_B^{\mathrm{tx}},\hat{\theta}B^{\mathrm{rx}},\hat{P}{\hat{\theta}_B^{\mathrm{tx}},\hat{\theta}_B^{\mathrm{rx}}}) (θ^Btx,θ^Brx,P^θ^Btx,θ^Brx),则用户 u u u 的位置和朝向可由几何关系计算为
ψ u = 1 2 ( θ ^ A r x − θ ^ B r x + ψ B + θ ^ B t x − ψ A − θ ^ A t x ) . (10) \psi_u=\frac{1}{2} \left( \hat{\theta}_A^{\mathrm{rx}}-\hat{\theta}_B^{\mathrm{rx}} +\psi_B+\hat{\theta}_B^{\mathrm{tx}} -\psi_A-\hat{\theta}_A^{\mathrm{tx}} \right). \tag{10} ψu=21(θ^Arx−θ^Brx+ψB+θ^Btx−ψA−θ^Atx).(10)
其余两个坐标由两条 LOS 射线在全局坐标系中的交点给出:
x u = x A + cos ( ψ B + θ ^ B t x ) cos ( ψ A + θ ^ A t x ) sin ( θ ^ A r x + θ ^ B r x ) ∣ y A − y B ∣ + sin ( ψ B + θ ^ B t x ) cos ( ψ A + θ ^ A t x ) sin ( θ ^ A r x + θ ^ B r x ) ∣ x A − x B ∣ . (11) \begin{aligned} x_u &=x_A+ \frac{ \cos(\psi_B+\hat{\theta}_B^{\mathrm{tx}}) \cos(\psi_A+\hat{\theta}_A^{\mathrm{tx}}) }{ \sin(\hat{\theta}_A^{\mathrm{rx}}+\hat{\theta}_B^{\mathrm{rx}}) }|y_A-y_B|\\ &\quad+ \frac{ \sin(\psi_B+\hat{\theta}_B^{\mathrm{tx}}) \cos(\psi_A+\hat{\theta}_A^{\mathrm{tx}}) }{ \sin(\hat{\theta}_A^{\mathrm{rx}}+\hat{\theta}_B^{\mathrm{rx}}) }|x_A-x_B|. \end{aligned} \tag{11} xu=xA+sin(θ^Arx+θ^Brx)cos(ψB+θ^Btx)cos(ψA+θ^Atx)∣yA−yB∣+sin(θ^Arx+θ^Brx)sin(ψB+θ^Btx)cos(ψA+θ^Atx)∣xA−xB∣.(11)
y u = y A − cos ( ψ B + θ ^ B t x ) sin ( ψ A + θ ^ A t x ) sin ( θ ^ A r x + θ ^ B r x ) ∣ y A − y B ∣ + sin ( ψ B + θ ^ B t x ) sin ( ψ A + θ ^ A t x ) sin ( θ ^ A r x + θ ^ B r x ) ∣ x A − x B ∣ . (12) \begin{aligned} y_u &=y_A- \frac{ \cos(\psi_B+\hat{\theta}_B^{\mathrm{tx}}) \sin(\psi_A+\hat{\theta}_A^{\mathrm{tx}}) }{ \sin(\hat{\theta}_A^{\mathrm{rx}}+\hat{\theta}_B^{\mathrm{rx}}) }|y_A-y_B|\\ &\quad+ \frac{ \sin(\psi_B+\hat{\theta}_B^{\mathrm{tx}}) \sin(\psi_A+\hat{\theta}_A^{\mathrm{tx}}) }{ \sin(\hat{\theta}_A^{\mathrm{rx}}+\hat{\theta}_B^{\mathrm{rx}}) }|x_A-x_B|. \end{aligned} \tag{12} yu=yA−sin(θ^Arx+θ^Brx)cos(ψB+θ^Btx)sin(ψA+θ^Atx)∣yA−yB∣+sin(θ^Arx+θ^Brx)sin(ψB+θ^Btx)sin(ψA+θ^Atx)∣xA−xB∣.(12)
两组角度还应满足几何约束
( ψ A + θ ^ A t x ) + ( ψ B + θ ^ B t x ) − ( θ ^ A r x + θ ^ B r x ) = 0. (13) \left(\psi_A+\hat{\theta}_A^{\mathrm{tx}}\right) +\left(\psi_B+\hat{\theta}_B^{\mathrm{tx}}\right) -\left(\hat{\theta}_A^{\mathrm{rx}}+\hat{\theta}_B^{\mathrm{rx}}\right)=0. \tag{13} (ψA+θ^Atx)+(ψB+θ^Btx)−(θ^Arx+θ^Brx)=0.(13)
借助式 (13),可以从波束管理测量 B A ( t ) \mathcal{B}_A(t) BA(t) 和 B B ( t ) \mathcal{B}_B(t) BB(t) 中识别并提取两条对应的 LOS 路径,这两个集合分别表示时刻 t t t 下 u u u-#A 和 u u u-#B 连接的最优波束集合。运动过程中,由两条 LOS 路径估计出的用户绝对位置和朝向可与 IMU、轮式编码器测量融合,实现更精确定位。由于式 (13) 的约束较严格,考虑测量噪声,本文将其放宽为
∣ ( ψ A + θ ^ A t x ) + ( ψ B + θ ^ B t x ) − ( θ ^ A r x + θ ^ B r x ) ∣ ≤ η , (14) \left| \left(\psi_A+\hat{\theta}_A^{\mathrm{tx}}\right) +\left(\psi_B+\hat{\theta}_B^{\mathrm{tx}}\right) -\left(\hat{\theta}_A^{\mathrm{rx}}+\hat{\theta}_B^{\mathrm{rx}}\right) \right|\leq \eta, \tag{14} (ψA+θ^Atx)+(ψB+θ^Btx)−(θ^Arx+θ^Brx) ≤η,(14)
其中 η \eta η 为放宽裕量,在原型中通过试错设置为 6 ∘ 6^\circ 6∘。
D. 基于 RCS 的栅格地图模型
本文采用 12 提出的栅格地图模型。2D 环境被划分为栅格,每个栅格被视为一个散射体,栅格值表示其反射强度,即 RCS 值。栅格地图可表示为由浮点实数组成的矩阵
M = σ i j i j , (15) \mathbf{M}=\\sigma_{ij}_{ij}, \tag{15} M=σijij,(15)
其中 σ i j \sigma_{ij} σij 为第 ( i , j ) (i,j) (i,j) 个栅格的 RCS 值,定义为该栅格的最大 RCS 值。第 ( i , j ) (i,j) (i,j) 个栅格的绝对位置为 ( x o + i d x , y o + j d y ) (x_o+i d_x,y_o+j d_y) (xo+idx,yo+jdy),其中 ( x o , y o ) (x_o,y_o) (xo,yo) 是第一个栅格的位置, d x d_x dx 和 d y d_y dy 分别表示 X X X 轴和 Y Y Y 轴方向的栅格尺寸。RCS 栅格地图同时展示物体轮廓以及环境对通信信号的影响,因此在材料识别和数据传输优化 43 中具有潜在应用。
III. 毫米波 ISAC-SLAM 框架
本文将所提出 ISAC-SLAM 的完整过程总结为算法 1。如算法 1 所示,所提出框架包含三个部分:OFDM 通信阶段的定位与建图、OFDM 感知阶段的精细建图,以及全局地图拼接。框架总体结构如图 5 所示。
text
算法 1:ISAC-SLAM
输入:总时间步 T
输出:所有用户的位置、速度和朝向,所有用户的局部地图,以及更新后的全局地图 M^(g)
初始化:与用户通信的所有基站的位置和朝向
for 每个用户 u 及其对应基站 A、B do
for t = 0 到 T do
通信阶段定位与建图:
if 激活波束管理 then
执行波束管理,获得 B_A(t) 和 B_B(t),提取 LOS 与一阶 NLOS。
由两条 LOS 计算用户位置 (x_u^(t), y_u^(t), psi_u^(t)),并结合轮式编码器执行 EKF 校正。
基于一阶 NLOS 路径获得粗地图,并与局部地图 M 融合。
end if
if 获得轮式编码器数据 then
执行 EKF 校正。
end if
if 获得 IMU 数据 then
执行 EKF 预测。
end if
感知阶段精细建图:
if 激活 OFDM 感知 then
通过波束扫描获得回波,解析 RA 图 Z[i,j]。
去除 Z[i,j] 中的 TX-RX 直通、噪声、旁瓣和杂波。
执行功率补偿以恢复 RCS。
使用 (x_u, y_u, psi_u) 更新局部地图 M。
end if
end for
end for
全局地图拼接:
将所有局部地图 M 传输到中央节点。
中央节点将 M 拼接为全局地图 M^(g)。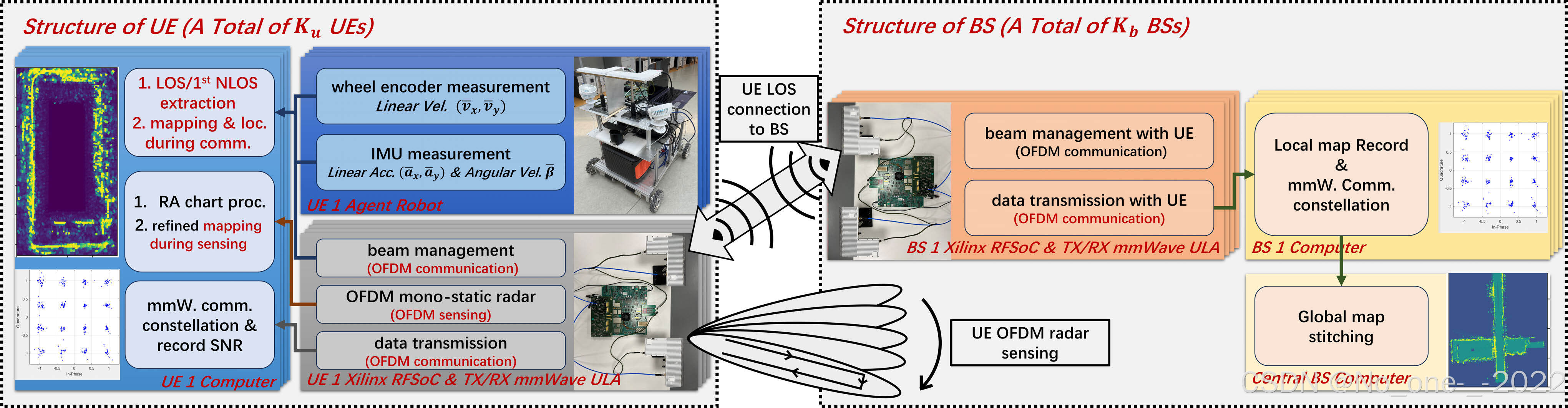
图 5. 所提出毫米波 ISAC-SLAM 框架的整体结构。每个用户由 UE 智能体机器人、一组 UE Xilinx RFSoC 与 TX/RX 毫米波 ULA 天线,以及 UE 计算机构成。每个 BS 由一组 BS Xilinx RFSoC 与 TX/RX 毫米波 ULA 天线,以及 BS 计算机构成。
A. OFDM 通信期间的定位与建图
1. LOS 与一阶 NLOS 提取
在 OFDM 通信期间,用户到两个基站的两条 LOS 路径被提取用于用户自定位,一阶 NLOS 路径被用于粗地图重建。高阶 NLOS 路径需要被去除,以避免产生虚假点。真实世界中无法直接观察毫米波通信信道传播,因此本文利用信道特征差异判断某条信道路径属于 LOS、一阶 NLOS 还是高阶 NLOS。对 LOS 和一阶 NLOS 路径而言,RSRP 测量值更高,AoA 和 AoD 的角扩展小于高阶 NLOS 44。因此,本文提出一种滤波算法,从波束管理结果 B ( t ) \mathcal{B}(t) B(t) 中选择 LOS 和一阶 NLOS 路径。
如第二节 B.1 所述,在标准 5G NR 波束管理的波束跟踪过程中,会对最优波束对集合 B ( t ) \mathcal{B}(t) B(t) 中的每个波束对 b i b_i bi 执行局部波束扫描。为了从 B ( t ) \mathcal{B}(t) B(t) 中选择 LOS 和一阶 NLOS 路径,本文记录每个 b i b_i bi 的波束跟踪结果,即 b i b_i bi 邻近全部波束对的 RSRP 测量值。假设 b i b_i bi 对应 TX 码本 T X U L A \mathrm{TX}{\mathrm{ULA}} TXULA 中第 i t x i{\mathrm{tx}} itx 个波束,以及 RX 码本 R X U L A \mathrm{RX}{\mathrm{ULA}} RXULA 中第 i r x i{\mathrm{rx}} irx 个波束。若 TX 与 RX 的局部波束扫描范围分别为 2 k i t x + 1 2k_i^{\mathrm{tx}}+1 2kitx+1 和 2 k i r x + 1 2k_i^{\mathrm{rx}}+1 2kirx+1,则对最优波束对 b i b_i bi 进行波束跟踪后生成的 RSRP 矩阵为
P b i = p ( θ i t x + m , θ i r x + l ) ( m , l ) ∈ R ( 2 k i t x + 1 ) × ( 2 k i r x + 1 ) , (16) \mathbf{P}^{b_i} =p(\\theta_{i_{\\mathrm{tx}}+m},\\theta_{i_{\\mathrm{rx}}+l})_{(m,l)} \in\mathbb{R}^{(2k_i^{\mathrm{tx}}+1)\times(2k_i^{\mathrm{rx}}+1)}, \tag{16} Pbi=p(θitx+m,θirx+l)(m,l)∈R(2kitx+1)×(2kirx+1),(16)
其中 m ∈ { − k i t x , − k i t x + 1 , ... , k i t x } m\in\{-k_i^{\mathrm{tx}},-k_i^{\mathrm{tx}}+1,\ldots,k_i^{\mathrm{tx}}\} m∈{−kitx,−kitx+1,...,kitx}, l ∈ { − k i r x , − k i r x + 1 , ... , k i r x } l\in\{-k_i^{\mathrm{rx}},-k_i^{\mathrm{rx}}+1,\ldots,k_i^{\mathrm{rx}}\} l∈{−kirx,−kirx+1,...,kirx},并满足 i t x − k i t x ≥ 0 i_{\mathrm{tx}}-k_i^{\mathrm{tx}}\geq0 itx−kitx≥0、 i t x + k i t x ≤ N d i r t x − 1 i_{\mathrm{tx}}+k_i^{\mathrm{tx}}\leq N_{\mathrm{dir}}^{\mathrm{tx}}-1 itx+kitx≤Ndirtx−1、 i r x − k i r x ≥ 0 i_{\mathrm{rx}}-k_i^{\mathrm{rx}}\geq0 irx−kirx≥0、 i r x + k i r x ≤ N d i r r x − 1 i_{\mathrm{rx}}+k_i^{\mathrm{rx}}\leq N_{\mathrm{dir}}^{\mathrm{rx}}-1 irx+kirx≤Ndirrx−1。
对 b i b_i bi,本文统计 RSRP 高于 γ t h r e P ^ b i \gamma_{\mathrm{thre}}\hat{P}{b_i} γthreP^bi 的邻近波束数量,其中 γ t h r e \gamma{\mathrm{thre}} γthre 是满足 0 < γ t h r e ≤ 1 0<\gamma_{\mathrm{thre}}\leq1 0<γthre≤1 的阈值比例, P ^ b i \hat{P}_{b_i} P^bi 是波束对 b i b_i bi 的 RSRP。将该数量记为 N i N_i Ni,统计过程为
N i = ∑ m = 0 2 k i t x + 1 ∑ l = 0 2 k i r x + 1 I ( P b i m , l > γ t h r e P ^ b i ) , (17) N_i=\sum_{m=0}^{2k_i^{\mathrm{tx}}+1}\sum_{l=0}^{2k_i^{\mathrm{rx}}+1} \mathbb{I}\left(\mathbf{P}^{b_i}m,l>\gamma_{\mathrm{thre}}\hat{P}_{b_i}\right), \tag{17} Ni=m=0∑2kitx+1l=0∑2kirx+1I(Pbim,l>γthreP^bi),(17)
其中当 x x x 为真时 I ( x ) = 1 \mathbb{I}(x)=1 I(x)=1,否则为 0。考虑到波束对 m , l m,l m,l 可能超出波束跟踪范围,进一步计算 N i N_i Ni 的比例 ξ i \xi_i ξi:
ξ i = N i ∑ m = 0 2 k i t x + 1 ∑ l = 0 2 k i r x + 1 I ( m , l i n b e a m t r a c k i n g r a n g e ) . (18) \xi_i= \frac{N_i}{ \sum_{m=0}^{2k_i^{\mathrm{tx}}+1} \sum_{l=0}^{2k_i^{\mathrm{rx}}+1} \mathbb{I}(m,l\ \mathrm{in\ beam\ tracking\ range})}. \tag{18} ξi=∑m=02kitx+1∑l=02kirx+1I(m,l in beam tracking range)Ni.(18)
本质上, ξ i \xi_i ξi 表示波束对的角扩展,较大的 ξ i \xi_i ξi 意味着较大的角扩展。然后,为 ξ i \xi_i ξi 设置阈值 ξ t h r e \xi_{\mathrm{thre}} ξthre,粗略判断某个波束对是否属于高阶 NLOS 路径。如果 ξ i > ξ t h r e \xi_i>\xi_{\mathrm{thre}} ξi>ξthre,则认为 b i b_i bi 是高阶 NLOS 路径,因为大角扩展是高阶 NLOS 路径的关键特征。经过该滤波过程后,可从原始最优波束对集合 B ( t ) \mathcal{B}(t) B(t) 中提取所有低角扩展波束对,即 ξ i ≤ ξ t h r e \xi_i\leq\xi_{\mathrm{thre}} ξi≤ξthre,从而形成 LOS 与一阶 NLOS 波束对集合 B ^ ( t ) \hat{\mathcal{B}}(t) B^(t)。随后,本文将 B ^ ( t ) \hat{\mathcal{B}}(t) B^(t) 中满足式 (13) 且 ξ i \xi_i ξi 最低的波束视作 LOS 路径,其余波束归为一阶 NLOS 路径。
注:
- LOS 和一阶 NLOS 通常表现为较尖锐的波束峰值,能量集中在少数 TX/RX 波束对上;高阶 NLOS 经过多次反射/散射后角扩展更大,强响应会分布到更多邻近波束。
- 因此, 5 × 5 5\times5 5×5 邻域过滤的作用是先剔除"散得很宽"的高阶 NLOS,避免这类路径在建图时产生虚假反射点。
- 式 (13) 用于在剩余低角扩展路径中检查两条 BS-UE 路径的几何一致性;满足该几何约束且角扩展最小的路径被视为 LOS,其余低角扩展路径归为一阶 NLOS。
2. 基于 EKF 的定位细化
为了提升定位精度,本文采用 EKF 算法融合 IMU、轮式编码器和两条 LOS 路径的 AoA/AoD 测量,实现用户同步定位。在 EKF 中,连续时间被离散为由 EKF 最短运行时间决定的时间步;换言之,第 k k k 个时间步对应第 k k k 轮 EKF 操作。令 ( x u ( k ) , y u ( k ) ) (x_u^{(k)},y_u^{(k)}) (xu(k),yu(k))、 ( v x ( k ) , v y ( k ) ) (v_x^{(k)},v_y^{(k)}) (vx(k),vy(k)) 和 ψ u ( k ) \psi_u^{(k)} ψu(k) 分别表示第 k k k 个时间步获得的优化用户位置、速度和朝向;令 ( a ˉ x ( k ) , a ˉ y ( k ) , β ˉ ( k ) ) (\bar{a}_x^{(k)},\bar{a}_y^{(k)},\bar{\beta}^{(k)}) (aˉx(k),aˉy(k),βˉ(k)) 表示第 k k k 时刻在用户局部坐标系下由 IMU 估计的加速度和角速度;令 ( x ˉ u ( k ) , y ˉ u ( k ) , ψ ˉ u ( k ) ) (\bar{x}_u^{(k)},\bar{y}_u^{(k)},\bar{\psi}_u^{(k)}) (xˉu(k),yˉu(k),ψˉu(k)) 表示第 k k k 时刻由式 (10)-式 (12) 计算得到的粗略位置和朝向;令 ( v ˉ x ( k ) , v ˉ y ( k ) ) (\bar{v}_x^{(k)},\bar{v}_y^{(k)}) (vˉx(k),vˉy(k)) 表示第 k k k 时刻用户坐标系下由轮式编码器估计的速度。
应用 EKF 的关键在于定义控制向量、状态向量和测量向量。用户的状态向量 x ( k ) \mathbf{x}^{(k)} x(k)、控制向量 u ( k ) \mathbf{u}^{(k)} u(k) 和测量向量 z ( k ) \mathbf{z}^{(k)} z(k) 分别为
x ( k ) = x u ( k ) , y u ( k ) , v x ( k ) , v y ( k ) , ψ u ( k ) T , (19) \mathbf{x}^{(k)}= \leftx_u\^{(k)},y_u\^{(k)},v_x\^{(k)},v_y\^{(k)},\\psi_u\^{(k)}\\right^T, \tag{19} x(k)=xu(k),yu(k),vx(k),vy(k),ψu(k)T,(19)
u ( k ) = a ˉ x ( k ) , a ˉ y ( k ) , β ˉ ( k ) T , (20) \mathbf{u}^{(k)}= \left\\bar{a}_x\^{(k)},\\bar{a}_y\^{(k)},\\bar{\\beta}\^{(k)}\\right^T, \tag{20} u(k)=aˉx(k),aˉy(k),βˉ(k)T,(20)
z ( k ) = x ˉ u ( k ) , y ˉ u ( k ) , v ˉ x ( k ) , v ˉ y ( k ) , ψ ˉ u ( k ) T . (21) \mathbf{z}^{(k)}= \left \\bar{x}_u\^{(k)},\\bar{y}_u\^{(k)},\\bar{v}_x\^{(k)},\\bar{v}_y\^{(k)},\\bar{\\psi}_u\^{(k)} \\right^T. \tag{21} z(k)=xˉu(k),yˉu(k),vˉx(k),vˉy(k),ψˉu(k)T.(21)
定义这些向量后,EKF 即可按常规方式工作。当新的 IMU 测量可用时,执行 EKF 预测 45 以估计系统状态;当来自轮式编码器的新速度测量或来自两条 LOS 路径的粗略定位可用时,执行 EKF 校正 45 以细化系统状态。通过反复执行预测与校正,定位精度逐步提高。
注:
- 小车位置估计可以理解为"两步走":毫米波通信阶段先给出绝对粗位置,IMU 和轮式编码器再通过 EKF 融合细化轨迹。
- 论文中的"小车"对应 UE 机器人平台;系统假设两个基站 BS #A、BS #B 的位置和朝向已知,并且 UE 始终能与这两个基站保持 LOS 直达连接。
- 在波束管理中,每条 LOS 路径由一组 AoD/AoA 表示:基站发射角给出从 BS 指向 UE 的射线方向,UE 接收角用于约束 UE 朝向;两条来自不同 BS 的 LOS 射线在全局平面中的交点给出 UE 的粗略二维位置。
- 式 (13)/(14) 用来从候选波束路径中筛选几何一致的 LOS 路径;原型中把约束放宽到约 6 ∘ 6^\circ 6∘,以容忍波束量化和测量噪声。
- EKF 的状态量是 x u , y u , v x , v y , ψ u T x_u,y_u,v_x,v_y,\\psi_u^T xu,yu,vx,vy,ψuT:IMU 的加速度和角速度用于预测,轮式编码器速度和 LOS 粗定位结果用于校正;这样既利用了里程计/IMU 的短时平滑性,也利用毫米波 LOS 提供的绝对位置来抑制累积漂移。
3. 使用一阶 NLOS 的粗建图(Rough Mapping With 1st NLOS)
为了利用稀疏一阶 NLOS 路径进行建图,本文假设一阶 NLOS 路径由镜面反射产生。对 AoA 与 AoD 记为 ( θ ^ n l o s t x , θ ^ n l o s r x ) (\hat{\theta}{\mathrm{nlos}}^{\mathrm{tx}},\hat{\theta}{\mathrm{nlos}}^{\mathrm{rx}}) (θ^nlostx,θ^nlosrx) 的一阶 NLOS 路径,其对应反射平面的中心和延展方向,即 ( x n l o s , y n l o s , ψ n l o s ) (x_{\mathrm{nlos}},y_{\mathrm{nlos}},\psi_{\mathrm{nlos}}) (xnlos,ynlos,ψnlos),由以下几何关系给出:
ψ n l o s = 1 2 θ \^ n l o s r x + θ \^ A r x − θ \^ n l o s t x − θ \^ A t x − ψ u , (22) \psi_{\mathrm{nlos}} =\frac{1}{2} \left \\hat{\\theta}_{\\mathrm{nlos}}\^{\\mathrm{rx}} +\\hat{\\theta}_{A}\^{\\mathrm{rx}} -\\hat{\\theta}_{\\mathrm{nlos}}\^{\\mathrm{tx}} -\\hat{\\theta}_{A}\^{\\mathrm{tx}} \\right-\psi_u, \tag{22} ψnlos=21θ\^nlosrx+θ\^Arx−θ\^nlostx−θ\^Atx−ψu,(22)
x n l o s = x A + sin ( θ ^ n l o s r x − θ ^ A r x ) cos ( θ ^ n l o s t x − θ ^ A t x ) sin ( θ \^ n l o s r x − θ \^ A r x ) − ( θ \^ n l o s t x + θ \^ A t x ) A u ‾ , (23) x_{\mathrm{nlos}} =x_A+ \frac{ \sin(\hat{\theta}{\mathrm{nlos}}^{\mathrm{rx}}-\hat{\theta}{A}^{\mathrm{rx}}) \cos(\hat{\theta}{\mathrm{nlos}}^{\mathrm{tx}}-\hat{\theta}{A}^{\mathrm{tx}}) }{ \sin\left (\\hat{\\theta}_{\\mathrm{nlos}}\^{\\mathrm{rx}}-\\hat{\\theta}_{A}\^{\\mathrm{rx}}) - (\\hat{\\theta}_{\\mathrm{nlos}}\^{\\mathrm{tx}}+\\hat{\\theta}_{A}\^{\\mathrm{tx}}) \\right }\overline{Au}, \tag{23} xnlos=xA+sin(θ\^nlosrx−θ\^Arx)−(θ\^nlostx+θ\^Atx)sin(θ^nlosrx−θ^Arx)cos(θ^nlostx−θ^Atx)Au,(23)
y n l o s = y A + sin ( θ ^ n l o s r x − θ ^ A r x ) sin ( θ ^ n l o s t x − θ ^ A t x ) sin ( θ \^ n l o s r x − θ \^ A r x ) − ( θ \^ n l o s t x + θ \^ A t x ) A u ‾ , (24) y_{\mathrm{nlos}} =y_A+ \frac{ \sin(\hat{\theta}{\mathrm{nlos}}^{\mathrm{rx}}-\hat{\theta}{A}^{\mathrm{rx}}) \sin(\hat{\theta}{\mathrm{nlos}}^{\mathrm{tx}}-\hat{\theta}{A}^{\mathrm{tx}}) }{ \sin\left (\\hat{\\theta}_{\\mathrm{nlos}}\^{\\mathrm{rx}}-\\hat{\\theta}_{A}\^{\\mathrm{rx}}) - (\\hat{\\theta}_{\\mathrm{nlos}}\^{\\mathrm{tx}}+\\hat{\\theta}_{A}\^{\\mathrm{tx}}) \\right }\overline{Au}, \tag{24} ynlos=yA+sin(θ\^nlosrx−θ\^Arx)−(θ\^nlostx+θ\^Atx)sin(θ^nlosrx−θ^Arx)sin(θ^nlostx−θ^Atx)Au,(24)
A u ‾ = cos ( ψ B + θ ^ B t x ) sin ( θ ^ A r x + θ ^ B r x ) ∣ y A − y B ∣ + sin ( ψ B + θ ^ B t x ) sin ( θ ^ A r x + θ ^ B r x ) ∣ x A − x B ∣ . (25) \overline{Au} = \frac{ \cos(\psi_B+\hat{\theta}{B}^{\mathrm{tx}}) }{ \sin(\hat{\theta}{A}^{\mathrm{rx}}+\hat{\theta}{B}^{\mathrm{rx}}) }|y_A-y_B| + \frac{ \sin(\psi_B+\hat{\theta}{B}^{\mathrm{tx}}) }{ \sin(\hat{\theta}{A}^{\mathrm{rx}}+\hat{\theta}{B}^{\mathrm{rx}}) }|x_A-x_B|. \tag{25} Au=sin(θ^Arx+θ^Brx)cos(ψB+θ^Btx)∣yA−yB∣+sin(θ^Arx+θ^Brx)sin(ψB+θ^Btx)∣xA−xB∣.(25)
反射平面的长度取为半功率波束宽度在反射平面上的截取长度。本文将反射平面上栅格点的 RCS 值设置为对应一阶 NLOS 波束对的 RSRP,从而创建粗略 RCS 栅格地图。为了将粗地图与本地 RCS 栅格地图融合,本文用一个因子对粗地图进行缩放,使粗地图的平均 RCS 值与局部地图平均 RCS 值对齐。
注:
- 这里把一阶 NLOS 波束对的 RSRP 近似作为反射平面栅格的 RCS 值;但 RSRP 还受 BS-反射面-UE 传播距离、路径损耗、天线增益和入射角等因素影响,因此不是纯粹的材料反射截面。
- 因此通信阶段的粗建图主要提供反射面位置和轮廓的初步估计;后续 OFDM 感知阶段会利用 RA 图中的距离 bin 做功率补偿,再生成更可靠的 RCS 局部地图。
B. OFDM 感知期间的精细建图
在 OFDM 感知期间,UE 在所有方向上执行类似雷达的波束扫描,并解析回波以获得 RA 图。具体而言,UE 将 TX 和 RX ULA 天线对齐到同一方向发射和接收 OFDM 信号,并依次扫描码本中的所有波束方向。需要注意,TX 与 RX 码本必须相同。由于 OFDM 感知的信号处理与第二节 A 中的 OFDM 通信不同,本文重新构建 OFDM 感知信号模型。
对某一方向 θ i \theta_i θi,由多个目标反射而来的第 μ \mu μ 个接收 OFDM 符号可表示为
y i ( t ) = ∑ μ = 0 N s − 1 ∑ m = 0 N t g − 1 ∑ n = 0 N c − 1 A ( m ) p T X ( μ N c + n ) e j 2 π f n ( t − 2 R m c ) e j 2 π f D t . (26) y_i(t)= \sum_{\mu=0}^{N_s-1}\sum_{m=0}^{N_{\mathrm{tg}}-1}\sum_{n=0}^{N_c-1} A(m)p_{\mathrm{TX}}(\mu N_c+n) e^{j2\pi f_n(t-\frac{2R_m}{c})} e^{j2\pi f_D t}. \tag{26} yi(t)=μ=0∑Ns−1m=0∑Ntg−1n=0∑Nc−1A(m)pTX(μNc+n)ej2πfn(t−c2Rm)ej2πfDt.(26)
其中 N c N_c Nc 和 N s N_s Ns 分别为一个 OFDM 通信时隙中的子载波数和符号数; T s T_s Ts、 f n f_n fn 和 f D f_D fD 分别表示 OFDM 符号持续时间、第 n n n 个子载波频率和多普勒频移; N t g N_{\mathrm{tg}} Ntg 是目标数量, R m R_m Rm 是第 m m m 个目标的距离; p T X ( μ N c + n ) p_{\mathrm{TX}}(\mu N_c+n) pTX(μNc+n) 和 A ( m ) A(m) A(m) 分别为调制数据和传输过程中的衰减。以 1 / T s 1/T_s 1/Ts 速率采样并进行 DFT 后,接收 OFDM 信号第 μ \mu μ 个符号的频域表达式为
Y μ i κ = ∑ m = 0 N t g − 1 ∑ n = 0 N c − 1 A ( m ) p T X ( μ N c + n ) e − j 4 π n R m / ( c T s ) e j 2 π μ f D T s × e j π γ ( n , κ ) N c − 1 N c sin ( π γ ( n , κ ) ) sin ( π γ ( n , κ ) / N c ) , (27) \begin{aligned} Y_\mu^i\\kappa &= \sum_{m=0}^{N_{\mathrm{tg}}-1}\sum_{n=0}^{N_c-1} A(m)p_{\mathrm{TX}}(\mu N_c+n) e^{-j4\pi nR_m/(cT_s)} e^{j2\pi\mu f_D T_s}\\ &\quad \times e^{j\pi\gamma(n,\kappa)\frac{N_c-1}{N_c}} \frac{\sin(\pi\gamma(n,\kappa))} {\sin\left(\pi\gamma(n,\kappa)/N_c\right)}, \end{aligned} \tag{27} Yμiκ=m=0∑Ntg−1n=0∑Nc−1A(m)pTX(μNc+n)e−j4πnRm/(cTs)ej2πμfDTs×ejπγ(n,κ)NcNc−1sin(πγ(n,κ)/Nc)sin(πγ(n,κ)),(27)
其中 γ ( n , κ ) = n − κ + f D T s \gamma(n,\kappa)=n-\kappa+f_DT_s γ(n,κ)=n−κ+fDTs。根据 46 的推导和 OFDM 基带参数,可对式 (27) 进行简化。
考虑移动行人或车辆通信场景,目标距离 R m R_m Rm 一般在 0 ∼ 10 3 0\sim10^3 0∼103 m 范围内,目标速度 v m v_m vm 基本在 0 ∼ 30 0\sim30 0∼30 m/s 范围内。对 OFDM 通信而言, T s T_s Ts 与基带基本频率处于同一数量级。在该原型中,OFDM 基带带宽为 B W = 820 BW=820 BW=820 MHz,子载波数为 N c = 512 N_c=512 Nc=512,RF 链路中心频率为 f c = 26 f_c=26 fc=26 GHz。因此,式 (27) 中各指数项数量级可估计为
f D = v m c f c ∼ 10 3 , T s = N c B W ∼ 10 − 6 , R m c T s ∼ 10 1 , f D T s ∼ 10 − 3 . (28) f_D=\frac{v_m}{c}f_c\sim 10^3,\quad T_s=\frac{N_c}{BW}\sim 10^{-6},\quad \frac{R_m}{cT_s}\sim 10^1,\quad f_D T_s\sim 10^{-3}. \tag{28} fD=cvmfc∼103,Ts=BWNc∼10−6,cTsRm∼101,fDTs∼10−3.(28)
可见, f D T s f_DT_s fDTs 的量级为 10 − 3 10^{-3} 10−3,而 R m / ( c T s ) R_m/(cT_s) Rm/(cTs) 的量级为 10 1 10^1 101,因此 e j 2 π μ f D T s e^{j2\pi\mu f_D T_s} ej2πμfDTs 可忽略。此外,考虑式 (27) 中类 sinc 项在 κ = n \kappa=n κ=n 时近似为 N c N_c Nc,其他位置近似为 0, Y μ i κ Y_\mu^i\\kappa Yμiκ 可简化为
Y μ i κ ≈ ∑ m = 0 N t g − 1 N c A ( m ) p T X ( μ N c + κ ) e − j 4 π κ R m / ( c T s ) . (29) Y_\mu^i\\kappa\approx \sum_{m=0}^{N_{\mathrm{tg}}-1} N_c A(m)p_{\mathrm{TX}}(\mu N_c+\kappa) e^{-j4\pi \kappa R_m/(cT_s)}. \tag{29} Yμiκ≈m=0∑Ntg−1NcA(m)pTX(μNc+κ)e−j4πκRm/(cTs).(29)
随后,通过逐元素除法消去调制数据,得到只包含距离和衰减项的表达式
Z μ i κ = Y μ i κ p T X ( μ N c + κ ) = ∑ m = 0 N t g − 1 N c A ( m ) e − j 4 π κ R m / ( c T s ) . (30) Z_\mu^i\\kappa =\frac{Y_\mu^i\\kappa}{p_{\mathrm{TX}}(\mu N_c+\kappa)} =\sum_{m=0}^{N_{\mathrm{tg}}-1} N_c A(m)e^{-j4\pi \kappa R_m/(cT_s)}. \tag{30} Zμiκ=pTX(μNc+κ)Yμiκ=m=0∑Ntg−1NcA(m)e−j4πκRm/(cTs).(30)
为提取目标距离和衰减,对 Z μ i κ Z_\mu^i\\kappa Zμiκ 执行 IDFT,并在波束扫描方向 θ i \theta_i θi 上生成 RA 图值 z μ i l z_\mu^il zμil:
z μ i l = ∑ m = 0 N t g − 1 N c A ( m ) e j π ( l − l m ) sin π ( l − l m ) sin π ( l − l m ) / N c , l m = 2 N c R m c T s . (31) z_\mu^il= \sum_{m=0}^{N_{\mathrm{tg}}-1} N_c A(m)e^{j\pi(l-l_m)} \frac{\sin\\pi(l-l_m)}{\sin\\pi(l-l_m)/N_c}, \quad l_m=\frac{2N_cR_m}{cT_s}. \tag{31} zμil=m=0∑Ntg−1NcA(m)ejπ(l−lm)sinπ(l−lm)/Ncsinπ(l−lm),lm=cTs2NcRm.(31)
于是 RA 图可表示为
Z = z 0 ; z 1 ; ⋯ ; z N r − 1 , z i = z μ i \[ 0 , z μ i 1 , ... , z μ i N c − 1 ] . (32) \mathbf{Z}=\\mathbf{z}_0;\\mathbf{z}_1;\\cdots;\\mathbf{z}_{N_r-1},\quad \mathbf{z}i=z_\\mu\^i\[0,z\mu^i1,\ldots,z_\mu^iN_c-1]. \tag{32} Z=z0;z1;⋯;zNr−1,zi=zμi\[0,zμi1,...,zμiNc−1].(32)
注意, Z \mathbf{Z} Z 是 N c × N d i r N_c\times N_{\mathrm{dir}} Nc×Ndir 复矩阵,这里的 N d i r N_{\mathrm{dir}} Ndir 表示 ULA 天线码本大小。直观地看,对式 (32),若取 Z \mathbf{Z} Z 每个元素的绝对幅度形成 Z a b s \mathbf{Z}{\mathrm{abs}} Zabs,则 Z a b s \mathbf{Z}{\mathrm{abs}} Zabs 中的局部最大幅度会出现在对应目标距离和角度的 RA 单元处。 Z a b s \mathbf{Z}_{\mathrm{abs}} Zabs 表示为
Z a b s i , j = ∣ R e ( Z i , j ) ∣ 2 + ∣ I m ( Z i , j ) ∣ 2 , (33) Z_{\mathrm{abs}}i,j= \sqrt{|\mathrm{Re}(Zi,j)|^2+|\mathrm{Im}(Zi,j)|^2}, \tag{33} Zabsi,j=∣Re(Zi,j)∣2+∣Im(Zi,j)∣2 ,(33)
其中 R e ( ⋅ ) \mathrm{Re}(\cdot) Re(⋅) 和 I m ( ⋅ ) \mathrm{Im}(\cdot) Im(⋅) 分别表示取复数实部和虚部, ∣ ⋅ ∣ |\cdot| ∣⋅∣ 表示取实数绝对值。
由于发射和接收 ULA 天线总是放置得很近,RA 图会受到 TX-RX 直通污染。对同一套硬件,TX-RX 直通及其旁瓣通常固定在某些距离 bin 上,并出现在 RA 图的所有角度 bin 中。因此,本文预先通过将 TX 与 RX ULA 天线同时指向天空且无目标出现的方向,测量 TX-RX 直通对应的距离 bin,然后用设备噪声值替换被污染的 bin。
由于 RA 图中的噪声、旁瓣和虚假点可能降低建图性能,本文在 RA 图上执行 CA-CFAR 算法,只保留 RCS 值高于 CA-CFAR 阈值的元素,并将其他元素置为 0。由于多次反射、测量误差等原因,远离主要杂波的区域仍可能存在若干小型离散杂波。本文将这些离散杂波定义为异常值,并进一步利用 K 近邻滤波(KNN)在图上检测和剔除它们。
回波幅度同时受到目标材料以及收发机与目标之间距离的影响。为了在地图中恢复仅由材料差异造成的 RCS 值,本文对 RA 图执行功率补偿。对第 i i i 个距离 bin,其对应距离为 i c / ( 2 B W ) i c/(2BW) ic/(2BW),补偿因子函数设计为
k i = ( 1 + K c o m p ⋅ i N r ) δ , (34) ki=\left(1+K_{\mathrm{comp}}\cdot\frac{i}{N_r}\right)^\delta, \tag{34} ki=(1+Kcomp⋅Nri)δ,(34)
其中 K c o m p K_{\mathrm{comp}} Kcomp 和 δ \delta δ 由真实实验调节。RA 图中每个元素乘以相应补偿因子完成补偿。
注:
- K c o m p K_{\mathrm{comp}} Kcomp 是距离功率补偿的强度系数,控制距离 bin 增大时补偿因子的整体增幅;值越大,远距离回波被放大得越多。
- δ \delta δ 是补偿公式的指数,控制补偿随距离增长的非线性程度;值越大,远距离 bin 的补偿增长越快。
在得到滤波并补偿后的 RA 图后,即可构建无失真的局部 RCS 栅格地图。根据 RCS 栅格地图模型,局部地图中落入 RA 图某个 bin 的每个栅格都被赋予与该 bin 相同的 RCS 值。考虑时刻 t t t 的用户位置 ( x u , y u , ψ u ) (x_u,y_u,\psi_u) (xu,yu,ψu),坐标为 p , q p,q p,q 的栅格点若落在第 i i i 个角度 bin 和第 j j j 个距离 bin 内,应满足
( i − 1 2 ) Δ θ ≤ arctan y o + q d y − y u x o + p d x − x u < ( i + 1 2 ) Δ θ , (35) \left(i-\frac{1}{2}\right)\Delta\theta \leq \arctan\frac{y_o+qd_y-y_u}{x_o+pd_x-x_u} < \left(i+\frac{1}{2}\right)\Delta\theta, \tag{35} (i−21)Δθ≤arctanxo+pdx−xuyo+qdy−yu<(i+21)Δθ,(35)
( j − 1 2 ) Δ R ≤ ( x o + p d x − x u ) 2 + ( y o + q d y − y u ) 2 < ( j + 1 2 ) Δ R , (36) \left(j-\frac{1}{2}\right)\Delta R \leq \sqrt{(x_o+pd_x-x_u)^2+(y_o+qd_y-y_u)^2} < \left(j+\frac{1}{2}\right)\Delta R, \tag{36} (j−21)ΔR≤(xo+pdx−xu)2+(yo+qdy−yu)2 <(j+21)ΔR,(36)
其中 d x d_x dx 和 d y d_y dy 分别为 X X X 轴和 Y Y Y 轴方向栅格尺寸, Δ θ \Delta\theta Δθ 与 Δ R \Delta R ΔR 分别为 RA 图的角度分辨率和距离分辨率。由于 RCS 值与多种电磁属性有关,同一地图栅格点在不同 RA 图中的测量结果可能不同。为简化建图算法并强调环境材料属性,本文选择同一栅格点的最大 RCS 值作为估计值。因此,当获取一帧新的 RA 图时,栅格值 M p , q Mp,q Mp,q 更新为
M p , q = max { M p , q , Z i , j } . (37) Mp,q=\max\{Mp,q,Zi,j\}. \tag{37} Mp,q=max{Mp,q,Zi,j}.(37)
注:
- M p , q Mp,q Mp,q 中的 p , q p,q p,q 是局部二维地图的 X / Y X/Y X/Y 栅格索引,不是角度和距离; Z i , j Zi,j Zi,j 中的 i , j i,j i,j 才是 RA 图的角度 bin 与距离 bin。
- 式 (35)-(36) 先把地图格子 p , q p,q p,q 对应的空间位置,依据当前 UE 位姿转换为相对 UE 的角度和距离,从而找到对应的 RA 单元 Z i , j Zi,j Zi,j;式 (37) 再用该观测值更新同一物理位置的地图格子,并保留较大的 RCS 值。
- "强调环境材料属性"是指保留同一栅格历史观测中的最大 RCS,使金属、玻璃等强反射材料在地图中更明显;这样可减少弱角度、遮挡或噪声观测对材料反射特征的稀释。
由 OFDM 通信得到的粗 RCS 栅格地图(comm-map)与由 OFDM 感知得到的 RCS 栅格地图(sens-map)合并,形成某个用户的局部地图。合并时,首先用一个因子对 comm-map 加权,该因子为 sens-map 平均 RCS 值与 comm-map 平均 RCS 值之比。然后,对每个栅格在 sens-map 与加权 comm-map 之间选择最大 RCS 值,得到局部 RCS 栅格地图。
C. 全局地图拼接
局部建图完成后,所有用户把局部地图发送到相应基站,所有基站再把局部地图发送到某个中央基站。随后,根据每个基站的绝对位置,将所有局部地图拼接为全局地图。以基站 #A 为例,记其局部地图和位置为 M A ( l ) \mathbf{M}_A^{(l)} MA(l) 与 ( x A , y A , ψ A ) (x_A,y_A,\psi_A) (xA,yA,ψA)。注意,地图 M A ( l ) \mathbf{M}A^{(l)} MA(l) 是在基站 #A 的局部坐标系 A \mathcal{A} A 中构建的,局部坐标系 A \mathcal{A} A 的原点为基站 #A 的位置。传输到中央节点后,局部地图被对齐到全局坐标系。对 M A ( l ) \mathbf{M}A^{(l)} MA(l) 中第 ( i , j ) (i,j) (i,j) 个栅格,其在局部坐标系 A \mathcal{A} A 下的坐标为 ( x i , j ( l ) , y i , j ( l ) ) (x{i,j}^{(l)},y{i,j}^{(l)}) (xi,j(l),yi,j(l)),则其在全局坐标系下的坐标为
x i , j ( g ) y i , j ( g ) = cos ψ A sin ψ A − sin ψ A cos ψ A x i , j ( l ) y i , j ( l ) + x A y A . (38) \begin{bmatrix} x_{i,j}^{(g)}\\ y_{i,j}^{(g)} \end{bmatrix} = \begin{bmatrix} \cos\psi_A & \sin\psi_A\\ -\sin\psi_A & \cos\psi_A \end{bmatrix} \begin{bmatrix} x_{i,j}^{(l)}\\ y_{i,j}^{(l)} \end{bmatrix} + \begin{bmatrix} x_A\\ y_A \end{bmatrix}. \tag{38} xi,j(g)yi,j(g)=cosψA−sinψAsinψAcosψAxi,j(l)yi,j(l)+xAyA.(38)
由于局部地图重建过程中用户发射功率、RF 增益等参数会变化,每个局部地图中的 RCS 值尺度差异显著。本文因此设置全局尺度以平滑拼接局部地图。由于传播环境通常一致,假设两张地图重叠区域中的平均 RCS 值相等。在两张地图 M ( g ) \mathbf{M}^{(g)} M(g) 和 M A ( l ) \mathbf{M}A^{(l)} MA(l) 的重叠区域 R \mathcal{R} R 内,分别计算 R \mathcal{R} R 中平均 RCS 值。为聚焦主要轮廓,只计算每张地图中高于最大 RCS 值比例阈值 σ t h r e \sigma{\mathrm{thre}} σthre 的 RCS 值平均。两个加权平均值的比值随后被用作全局尺度:
M ˉ ( g ) = ∑ ϵ ( g ) ( x i , j ( g ) , y i , j ( g ) ) M ( g ) i ( g ) , j ( g ) ∑ ϵ ( g ) ( x i , j ( g ) , y i , j ( g ) ) , (39) \bar{M}^{(g)}= \frac{ \sum \epsilon^{(g)}(x_{i,j}^{(g)},y_{i,j}^{(g)})M^{(g)}i\^{(g)},j\^{(g)} }{ \sum \epsilon^{(g)}(x_{i,j}^{(g)},y_{i,j}^{(g)}) }, \tag{39} Mˉ(g)=∑ϵ(g)(xi,j(g),yi,j(g))∑ϵ(g)(xi,j(g),yi,j(g))M(g)i(g),j(g),(39)
M ˉ ( l ) = ∑ ϵ ( l ) ( x i , j ( l ) , y i , j ( l ) ) M ( l ) i ( l ) , j ( l ) ∑ ϵ ( l ) ( x i , j ( l ) , y i , j ( l ) ) , (40) \bar{M}^{(l)}= \frac{ \sum \epsilon^{(l)}(x_{i,j}^{(l)},y_{i,j}^{(l)})M^{(l)}i\^{(l)},j\^{(l)} }{ \sum \epsilon^{(l)}(x_{i,j}^{(l)},y_{i,j}^{(l)}) }, \tag{40} Mˉ(l)=∑ϵ(l)(xi,j(l),yi,j(l))∑ϵ(l)(xi,j(l),yi,j(l))M(l)i(l),j(l),(40)
M ^ A ( l ) = M ˉ ( g ) M ˉ A ( l ) ⋅ M A ( l ) . (41) \hat{\mathbf{M}}_A^{(l)} =\frac{\bar{M}^{(g)}}{\bar{M}_A^{(l)}}\cdot \mathbf{M}_A^{(l)}. \tag{41} M^A(l)=MˉA(l)Mˉ(g)⋅MA(l).(41)
其中 ϵ ( g ) \epsilon^{(g)} ϵ(g) 与 ϵ ( l ) \epsilon^{(l)} ϵ(l) 分别用于判断 ( x ( g ) , y ( g ) ) (x^{(g)},y^{(g)}) (x(g),y(g)) 是否位于 R \mathcal{R} R 中,以及 M ( g ) \mathbf{M}^{(g)} M(g) 和 M A ( l ) \mathbf{M}A^{(l)} MA(l) 的对应 RCS 值是否超过 σ t h r e \sigma{\mathrm{thre}} σthre。此外, i ( g ) = x i , j ( g ) / / d x ( g ) i^{(g)}=x_{i,j}^{(g)}//d_x^{(g)} i(g)=xi,j(g)//dx(g), j ( g ) = y i , j ( g ) / / d y ( g ) j^{(g)}=y_{i,j}^{(g)}//d_y^{(g)} j(g)=yi,j(g)//dy(g),为坐标 ( x i , j ( g ) , y i , j ( g ) ) (x_{i,j}^{(g)},y_{i,j}^{(g)}) (xi,j(g),yi,j(g)) 对应的全局地图索引。
随后,按对齐坐标和局部地图拼接后的 RCS 值更新全局地图 M ( g ) \mathbf{M}^{(g)} M(g):
M ( g ) i ( g ) , j ( g ) = max { M ( g ) i ( g ) , j ( g ) , M ^ A ( l ) i , j } . (42) \mathbf{M}^{(g)}i\^{(g)},j\^{(g)} = \max\left\{ \mathbf{M}^{(g)}i\^{(g)},j\^{(g)}, \hat{\mathbf{M}}_A^{(l)}i,j \right\}. \tag{42} M(g)i(g),j(g)=max{M(g)i(g),j(g),M^A(l)i,j}.(42)
IV. 原型系统设计
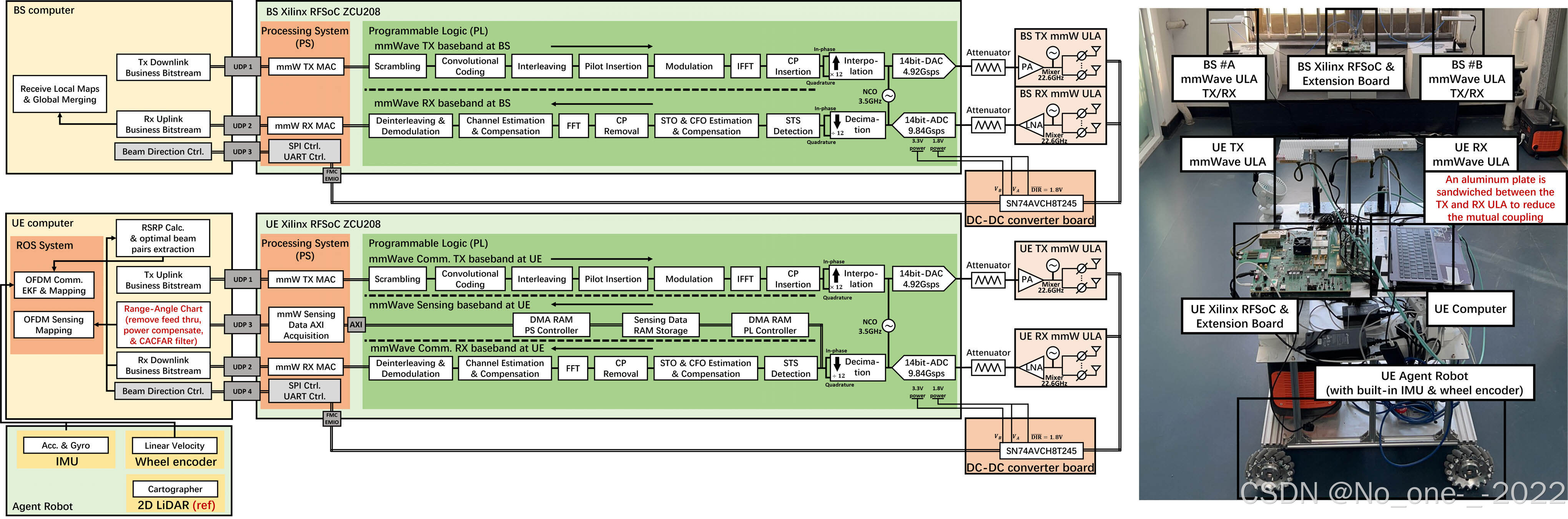
图 6. 所提出毫米波 ISAC-SLAM 原型的架构示意图,以及实验中的真实原型照片。
所提出毫米波 ISAC-SLAM 原型的架构示意和对应真实实现如图 6 所示。每个基站由一台计算机、一个 Xilinx RFSoC 和一对 32 × 1 32\times 1 32×1 毫米波 ULA 天线组成,其中一组 ULA 用于发送毫米波信号,另一组用于接收毫米波信号。每个用户部署在一个智能体机器人上,机器人配备内置 IMU 和轮式编码器,可提供加速度、角速度和线速度。本文将原型分为 OFDM 通信、OFDM 感知和 ISAC-SLAM 软件系统三个部分。
在 OFDM 通信中,基站和用户的计算机与 RFSoC 协作,通过波束管理实现毫米波高速 OFDM 通信。在发射端,计算机通过有线 UDP 连接生成并发送业务数据比特流到 RFSoC。RFSoC 执行完整的 OFDM 数字信号处理,将比特流转换为发射 OFDM 基带信号,包括扰码、交织、导频插入、QAM 调制、IFFT 和循环前缀插入。离散 OFDM 基带信号随后被插值并上变频至 3.5 GHz 中频(intermediate frequency, IF),再转换为模拟 IF 信号。该 IF 信号通过 SMA 线缆发送到 TX 毫米波 ULA,并进一步与 22.6 GHz 固定频率混频得到 TX 毫米波 RF 信号。随后,TX 毫米波 RF 信号沿最优 TX 波束方向发射。在接收端,通过发射端生成 TX 毫米波信号的逆过程得到接收基带信号。基于接收基带信号,系统通过符号同步、载波频偏(carrier frequency offset, CFO)估计与补偿、CP 去除、DFT、信道估计、信道均衡、符号解调、解交织、解码和解扰恢复业务数据。
在 OFDM 通信期间,系统实现包括初始接入和波束跟踪在内的波束管理。在初始接入阶段,当尚未记录最优波束对时,基站和用户执行遍历式下行波束扫描;在波束跟踪阶段,当稳定通信已经建立时,基站和用户只在最优波束对附近执行局部下行波束扫描。当初始接入或波束跟踪被激活时,基站计算机生成 TX 波束方向控制命令,该命令随后传输到 RFSoC 并发送到 TX 毫米波 ULA 天线。为减少波束方向命令传输时间,本文使用 4 MHz SPI 端口传输命令。此外,本文设计 DC-DC SPI 转换板,以支持 RFSoC 与毫米波 ULA 之间稳健的高速 SPI 连接。与此同时,基站 RFSoC 发送特定下行 OFDM 符号用于波束测量,基站计算机通过 UDP 线缆通知用户波束扫描情况以完成同步。用户计算机随即生成 RX 波束方向控制命令,设置 RX 毫米波 ULA 用于接收。接收基带信号的 RSRP 根据式 (5) 计算并保存在用户计算机中。
在 OFDM 感知中,每个用户以单基地 OFDM 雷达模式遍历所有波束方向。对某一给定波束方向,用户生成 TX 与 RX 天线的波束控制命令,控制 TX 与 RX 毫米波 ULA 在该方向上发射和接收毫米波 OFDM 信号。传输期间,用户侧计算机和 RFSoC 执行与 OFDM 通信相同的信号处理。用户在发射开始后同步监听回波,以确保不会产生盲区。接收回波后,系统执行下变频和抽取,生成接收 OFDM 基带信号,随后通过直接存储器访问(DMA)缓存到随机存取存储器(RAM)中。在给定方向的完整 OFDM 帧传输完成后,缓存的基带回波信号通过 AXI 总线和 UDP 端口上传到用户计算机。为实现对原始 OFDM 回波的灵活滤波,本文在用户计算机中处理 OFDM 感知数据并获得 RA 图。
在 ISAC-SLAM 软件系统中,本文在用户计算机上基于 ROS 设计多传感器 ISAC-SLAM 软件平台。该平台实时采集并处理 OFDM 通信波束管理生成的最优波束对集合、OFDM 感知生成的 RA 图、IMU 生成的加速度与角速度,以及轮式编码器生成的线速度。为在线同时处理不同类型数据,系统建立数据采集和数据处理的并行线程,并维护统一的用户位置和局部地图。当最优波束对集合、轮式编码器测量、IMU 测量和 RA 图可用时,平台基于当前缓存的用户位置和局部地图并发执行 EKF 校正、EKF 预测或局部地图更新。计算结果被缓存,并作为下一轮数据采集与处理中的新用户位置和局部地图。
OFDM 通信中的波束管理扫描和 OFDM 感知中的波束扫描速度基本都是每个波束对 80 µs。最优波束对和 RA 图的数据采集频率均为 5 帧每秒(FPS),也就是说,通信波束管理和 OFDM 雷达感知均以 5 FPS 执行。在 820 MHz 通信带宽和 512 个子载波下,当 SNR 超过 25 dB 且采用 16-QAM 调制时,系统下行传输速率可超过 1 Gbps。原型中的 OFDM 通信基带和系统能够实时传输 H.264 编码的 4K 高清视频。采用 32 × 1 32\times 1 32×1 毫米波 ULA 天线时,OFDM 感知基带和系统可达到约 0.1828 m 的分米级距离分辨率和 4° 角分辨率。
V. 实验结果
本节在三个真实世界场景中评估所提出毫米波 ISAC-SLAM 原型的定位和建图性能,并构建所有场景的综合 RCS 全局栅格地图。
A. 实验设置
1. 场景描述
所有实验都在清华大学主楼五层的三个室内场景中进行,如图 7 所示。场景 #1 是一条约 40 m 长、3 m 宽的直走廊,走廊两侧分布有玻璃幕墙和多个房间的突出柱体。场景 #2 是一个长 14 m、宽 5 m 的电梯间,其中一侧有向内凹陷的金属电梯门,前方有楼梯。场景 #3 是一个长 15 m、宽 8 m 的教室,内部有柜子、水泥柱、金属实验设备、桌子等多种物体。三个场景相互连通,通过拼接所有局部地图即可获得整层楼的全局地图。选择这三个场景是因为它们包含丰富材料、多样电磁特性和相对复杂轮廓,能够充分评估所提出毫米波 ISAC-SLAM 框架和原型的实用性。
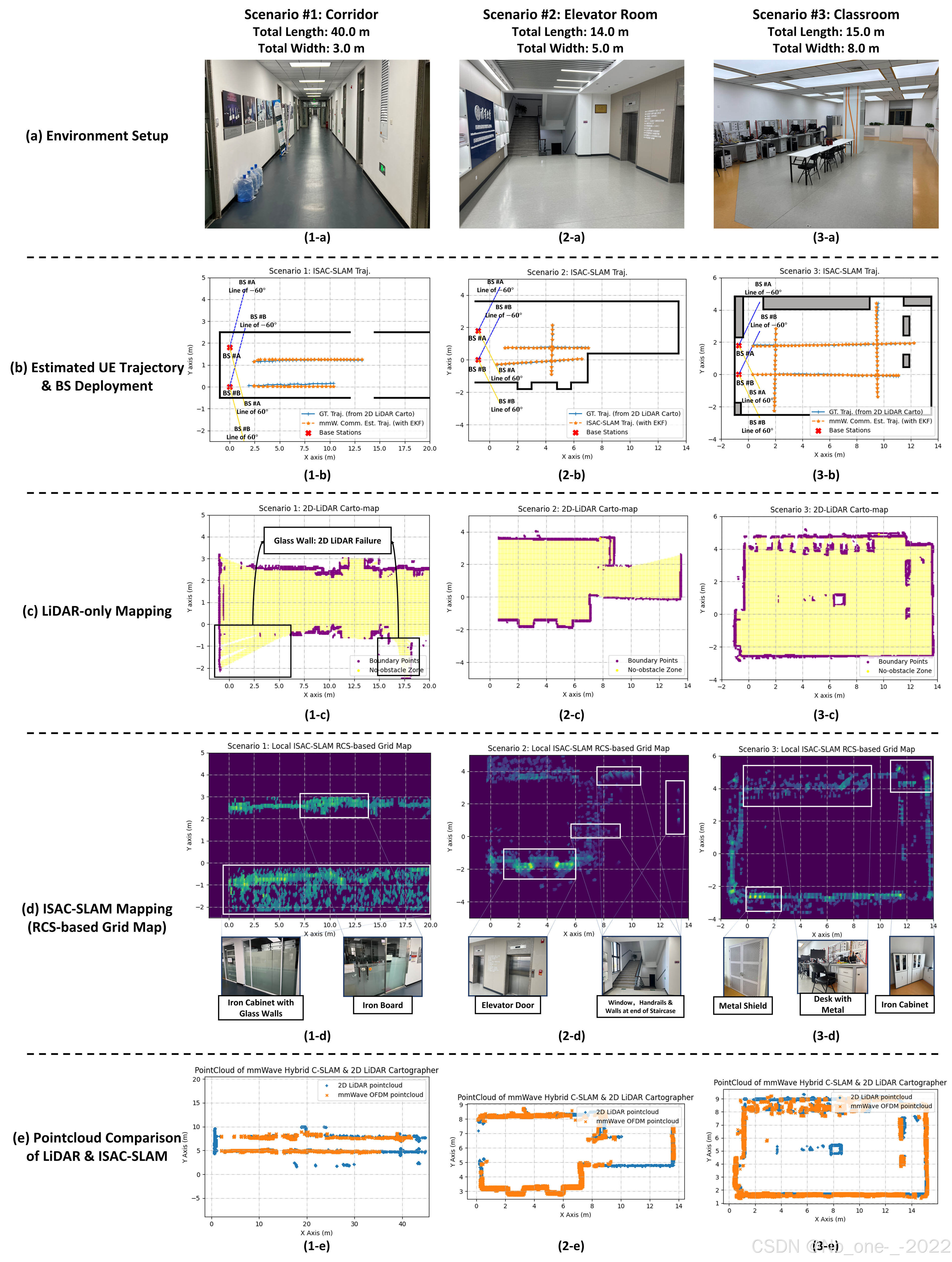
图 7. 实验场景、定位与建图结果概览。每一列对应一个场景;各行自上而下分别展示环境设置、BS 部署和 UE 轨迹定位结果、仅 LiDAR 建图结果、ISAC-SLAM 建图结果以及点云对比结果。
注:
- 图中的 "2D LiDAR Carto-MAP" 是由 2D 激光雷达数据经 Cartographer SLAM 生成的二维参考地图;2D 激光雷达只扫描一个平面,用于记录墙体和障碍物轮廓。
- 图中的 "RCS-based Grid Map" 是基于雷达散射截面(RCS)的栅格地图;每个格子的亮度/数值表示该位置对毫米波的反射强弱,可反映环境轮廓和材料差异。
- 各个场景下的 "Local ISAC-SLAM RCS-based Grid Map" 是由本文提出的毫米波 ISAC-SLAM 算法生成的局部 RCS 栅格地图。
- "Pointcloud Comparison of LiDAR & ISAC-SLAM" 将 ISAC-SLAM 地图中高 RCS 栅格点提取为点云,并与 2D LiDAR Cartographer 点云对比,主要用于验证几何轮廓和位置精度,而不是材料差异。
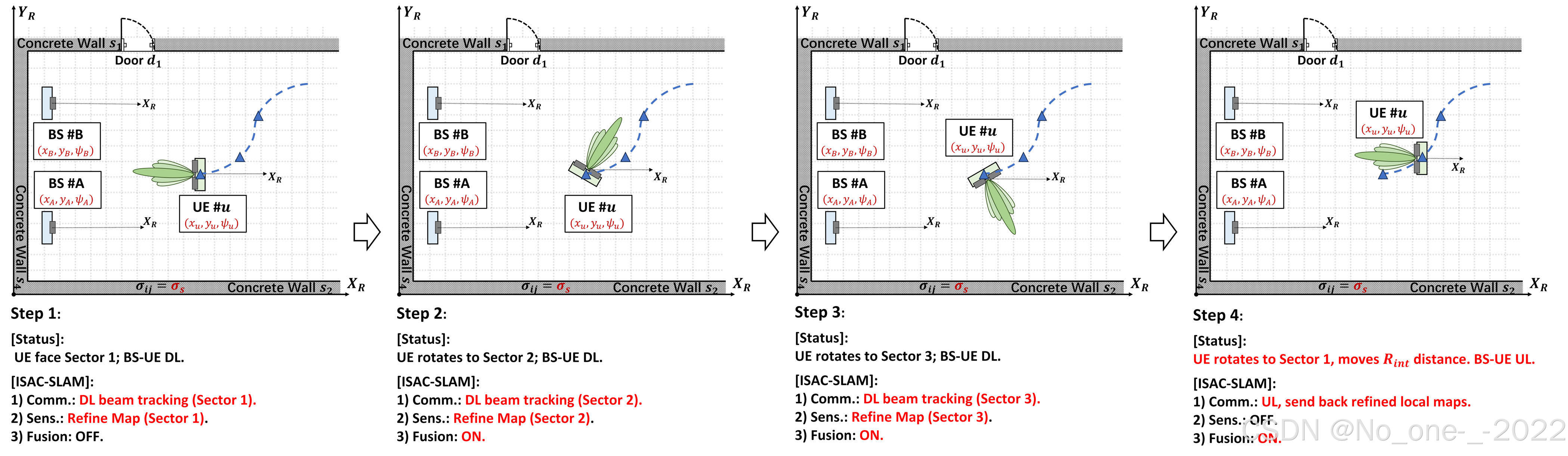
图 8. 所提出 ISAC-SLAM 框架的逐步过程示意。图中展示了所有实验过程中 BS/UE 状态、OFDM 通信(Comm.)、OFDM 感知(Sens.)以及 IMU/轮式编码器融合(Fusion)的演化。
注:
- 图 8 展示的是 UE 的一轮工作周期:UE 每移动一小段距离 R i n t R_{\mathrm{int}} Rint,就在三个扇区中依次执行下行波束跟踪、OFDM 感知和融合更新,然后进入下一段移动。
- Comm. 模块中的 "DL beam tracking" 指下行波束跟踪:BS 和 UE 在当前最优波束对附近做局部扫描,维护高增益通信链路,并产生用于后续 LOS/NLOS 路径识别的波束管理结果。
- IMU 是惯性测量单元(Inertial Measurement Unit),在本文中提供加速度和角速度,用于 Fusion/EKF 中估计 UE 的运动和朝向变化。
- 局部 SLAM 地图主要由 UE/机器人侧生成;UE 将更新后的栅格坐标和 RCS 值上传给 BS,中央 BS/中央节点再把多个局部地图拼接为全局地图。
- 图中的蓝色虚线表示 UE 的移动路径示意,不是最终地图;绿色扇形表示当前扇区的毫米波波束扫描/感知覆盖方向。
- X R X_R XR 和 Y R Y_R YR 表示场景参考坐标系的两个坐标轴,用于描述 BS、UE 和地图栅格的位置。
- BS #A 下方的 ( x A , y A , ψ A ) (x_A,y_A,\psi_A) (xA,yA,ψA) 表示基站 A 的位姿,其中 ( x A , y A ) (x_A,y_A) (xA,yA) 是位置, ψ A \psi_A ψA 是基站朝向角。
2. 原型设置
接下来介绍原型配置,尤其是 ULA 天线部署和实验流程。实验中的真实原型照片如图 6 所示。在每个场景中,本文部署两个基站和一个 UE 用于 ISAC-SLAM。对基站而言,两个基站在三个场景中的坐标分别为 ( 0.0 , 0.0 ) (0.0,0.0) (0.0,0.0)、 ( 0.0 , 1.8 ) (0.0,1.8) (0.0,1.8), ( − 0.8 , 0.0 ) (-0.8,0.0) (−0.8,0.0)、 ( − 0.8 , 1.8 ) (-0.8,1.8) (−0.8,1.8),以及 ( − 0.7 , 0.0 ) (-0.7,0.0) (−0.7,0.0)、 ( − 0.7 , 1.8 ) (-0.7,1.8) (−0.7,1.8),在图 7(1-b)、(2-b) 和 (3-b) 中用红色叉号标注。每个场景中的两个基站命名为 BS #A 和 BS #B,与图 4 和图 6 中命名一致。图 7(1-b)、(2-b) 和 (3-b) 中,每个基站处标注的蓝线和金线分别表示 − 60 ∘ -60^\circ −60∘ 和 60 ∘ 60^\circ 60∘ 方向。基站的放置保证所有 UE 轨迹都处于 LOS 覆盖中。
需要特别说明所有实验中基站和 UE 的 ULA 天线部署。本文对基站和 UE 采用三扇区布局。不过,由于总共只有 4 个天线,实验中每个场景的 BS #A 和 BS #B 只部署 1 个扇区,如图 6 的原型照片所示。为防止这种单扇区限制影响 ISAC-SLAM 原型验证,本文在所有实验中将 UE 轨迹限制在 BS #A 和 BS #B 的扇区 1 对应的 120 ∘ 120^\circ 120∘ 覆盖范围内。
对 UE,只部署一个 TX ULA 和一个 RX ULA,且二者指向同一方向。为实现水平 360° 覆盖,UE 每移动 R i n t ≈ 0.25 R_{\mathrm{int}}\approx0.25 Rint≈0.25 m 就原地旋转 120° 和 240°。这种原地旋转由麦克纳姆轮实现,麦克纳姆轮支持全向移动和旋转,从而补偿 ULA 天线数量有限的问题。
注:
- 这里的"用户/UE"指装有 RFSoC、TX/RX ULA、IMU 和轮式编码器的移动机器人平台,不是普通手持用户;理论框架中可用三扇区天线覆盖 360°,而本文原型因只装一对 TX/RX ULA,才通过原地旋转 120°/240° 模拟三扇区全向感知。
进一步描述所有实验中 ISAC-SLAM 原型的收发过程,如图 8 所示。初始时,UE 直接朝向 BS #A 和 BS #B,即扇区 1。UE 每移动 R i n t R_{\mathrm{int}} Rint,就触发一轮 OFDM 通信和感知:BS #A 和 BS #B 切换到发射模式,协同 UE 在当前天线扇区内完成下行(downlink, DL)波束跟踪,然后辅助 UE 执行 OFDM 感知波束扫描。随后,UE 旋转 120° 和 240°,即扇区 2 和扇区 3,并在第二、第三天线扇区重复该过程。在这些旋转期间,完整 ISAC-SLAM 框架按照所提出的时分 ISAC 协议执行。完成三个扇区后,UE 回到扇区 1 并继续移动 R i n t R_{\mathrm{int}} Rint,此时基站切回上行(uplink, UL)接收模式,UE 只把更新后的栅格坐标和 RCS 值上传到 BS #A,以减少数据开销。
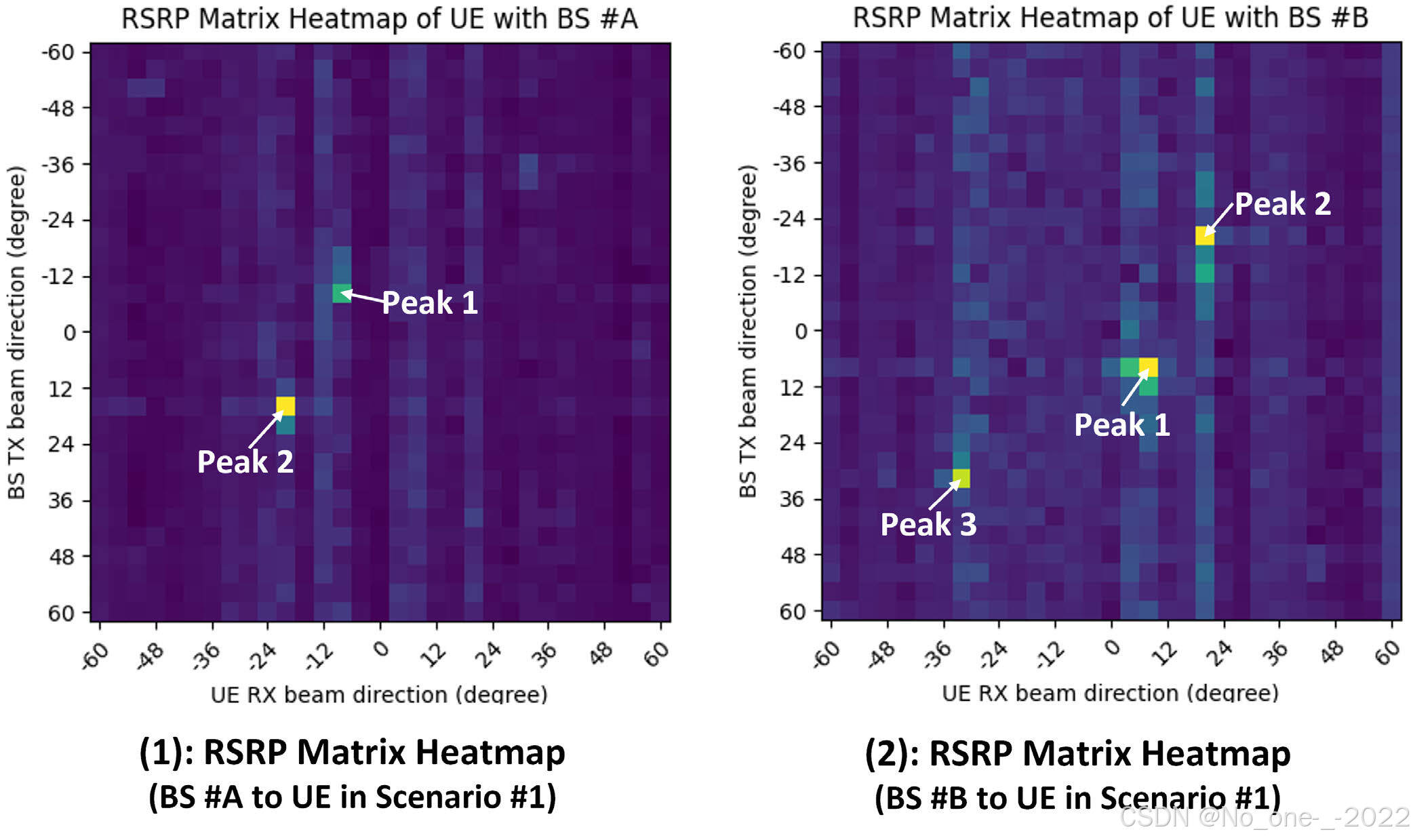
图 9. 场景 #1 中 BS #A 和 BS #B 通过波束扫描获得的 RSRP 热力图。热力图显示了主导 LOS 和一阶 NLOS 路径,其相对强度由颜色编码。Peak 1 表示 LOS 路径,Peak 2/3 表示所提出算法识别出的一阶 NLOS 路径。
3. 系统参数
OFDM ISAC 基带和毫米波 RF 链路的关键参数总结于表 I。
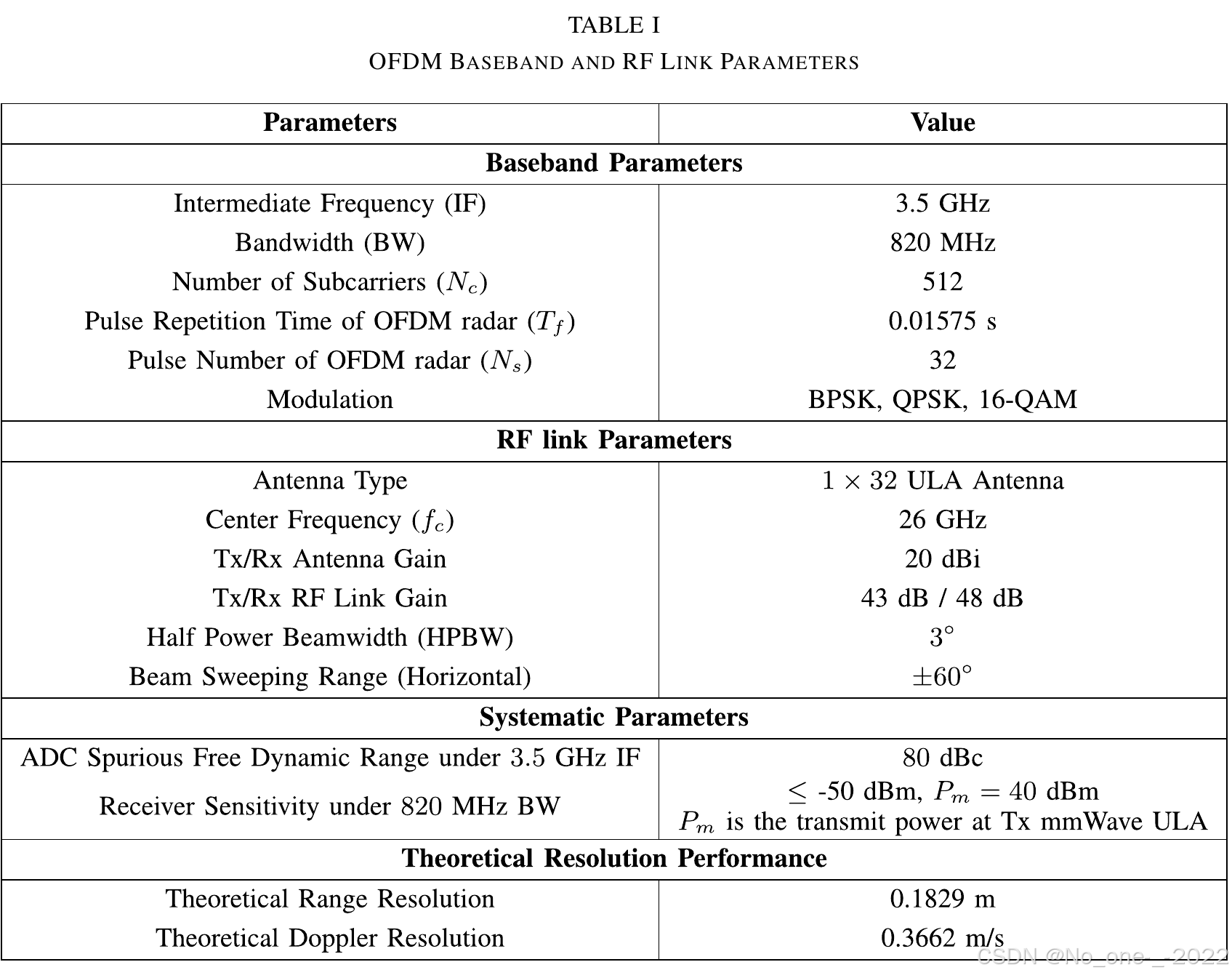
表 I. OFDM 基带和 RF 链路参数。
注:
- 表 I 只给出统一系统参数 P m = 40 d B m P_m=40\,\mathrm{dBm} Pm=40dBm,并说明其为 Tx 毫米波 ULA 处的发射功率;文章没有进一步分别说明 BS #A、BS #B 和 UE 感知阶段各自的 Tx 发射功率,也没有明确通信阶段和感知阶段是否采用相同发射功率。
- 因此本文中的 UE 更应理解为具备较高发射功率、阵列增益和本地计算能力的专用 RFSoC 移动终端/机器人平台,不能直接等同于普通低功耗手机 UE。
B. OFDM 通信期间的定位与建图
如图 9 所示,本文展示了场景 #1 中 UE 与 BS #A、BS #B 之间下行波束管理初始接入结果。如第二节 B.1 所述,下行波束管理中的初始接入需要在整个 TX 和 RX 码本上执行穷举波束扫描,并获得 "UE-BS #A" 与 "UE-BS #B" 的 RSRP 矩阵,即 P A \mathbf{P}^A PA 和 P B \mathbf{P}^B PB。图 9(1) 和图 9(2) 以热力图形式展示了 P A \mathbf{P}^A PA 和 P B \mathbf{P}^B PB。热力图的 X X X 轴表示 RX 码本索引,每个索引对应式 (3) 中 UE 的一个接收波束方向; Y Y Y 轴表示 TX 码本索引,每个索引对应式 (2) 中基站的一个发射方向。因此,图 9(1)/(2) 中每个网格对应 UE 与 BS #A/#B 之间的一个发射-接收波束对,其 RSRP 值用颜色表示。颜色越亮,波束对 RSRP 越高。
对每张热力图,本文选择功率最大的前 5 个波束对形成集合 B \mathcal{B} B。对 B \mathcal{B} B 中第 i i i 个波束对 b i b_i bi,如果在 5 × 5 5\times5 5×5 邻域内有超过 10 个波束对的 RSRP 超过 b i b_i bi 的 RSRP 的 40%,则认为 b i b_i bi 属于高阶反射路径,并从 B \mathcal{B} B 中移除。随后,根据式 (13) 进一步判断 LOS 路径。图 9 展示了所提出 LOS 与一阶 NLOS 识别算法结果。如白色箭头所示,每张热力图中的 Peak 1 是提取出的 LOS 路径,Peak 2/3 是提取出的一阶 NLOS 路径。
注:
- 图 9 中每个格子表示一个 TX/RX 波束对:横轴是 UE 接收波束方向,可理解为该路径到达 UE 的角度 AoA;纵轴是 BS 发射波束方向,可理解为该路径离开 BS 的角度 AoD;颜色表示该波束对的 RSRP 强度。亮点只说明该方向组合上存在较强多径响应,并不天然等于 LOS。
- 识别流程不是简单选择最亮点,而是先从每张 RSRP 热力图中取功率最大的前 5 个候选波束对,形成候选集合 B \mathcal{B} B。这些候选峰可能包含 LOS、一阶 NLOS,也可能包含更高阶反射或散射路径。
- 论文先用局部角扩展剔除高阶 NLOS:对候选峰 b i b_i bi,检查其周围 5 × 5 5\times5 5×5 邻域内有多少格子的 RSRP 超过该峰值的 40%;若超过 10 个格子满足该条件,说明能量在邻近 TX/RX 波束中扩散较宽,论文将其视为高阶反射路径并移除。
- 这个角扩展判断背后的物理直觉是:LOS 和一阶镜面 NLOS 通常形成较尖锐、集中的波束峰;高阶 NLOS 经多次反射/散射后角度更分散,强响应会铺到更多邻近波束对上。
- 剩余的低角扩展候选路径中,再用两个基站之间的几何一致性筛选 LOS。具体来说,来自 BS #A 和 BS #B 的 LOS AoD/AoA 应满足式 (13) 的角度关系,等价于两条从已知基站出发的直达射线应能在同一个 UE 位置处相交,并给出一致的 UE 朝向;原型中用式 (14) 将该约束放宽到约 6 ∘ 6^\circ 6∘,以容忍波束量化和测量噪声。
- 因此图中的 Peak 1 表示通过几何一致性判定出的 LOS 路径;Peak 2/Peak 3 是低角扩展但不满足 LOS 几何约束的强峰,被归为一阶 NLOS,用于后续基于镜面反射假设的粗建图。换言之,Peak 1 不一定是全图最亮峰,LOS 的关键判据是双基站几何一致性,而不是 RSRP 最大。
接着测试 OFDM 通信期间的定位与建图性能,其中仅利用 LOS 和一阶 NLOS 路径完成定位与建图。本文控制 UE 在场景 #1 中沿三条轨迹移动,并记录由 2D LiDAR Cartographer 生成的定位真值,如图 10 所示。同时,UE 使用所提出 LOS 与一阶 NLOS 提取算法,从波束管理结果中实时提取并区分 LOS 和一阶 NLOS 路径。来自 BS #A 和 BS #B 到 UE 的两条 LOS 路径用于粗定位,一阶 NLOS 路径用于粗建图(rough mapping)。
注:
- LOS 粗定位利用两个已知位置和朝向的 BS:由 BS #A、BS #B 的 LOS 发射/接收角度确定两条直达射线,两条射线的几何交点给出 UE 的粗略位置,并结合 AoA/AoD 估计 UE 朝向。
- 一阶 NLOS 粗建图不直接依赖时延;它先用 LOS 粗定位得到 UE 位姿和 BS-UE 几何距离,再利用一阶 NLOS 的 AoD/AoA 与镜面反射假设,反推出反射平面的位置和方向,并将其覆盖到对应地图栅格。
- 图中的 "Iron Board" 指走廊中的金属板状物,"board" 在这里是板/面板,不是电路板。
- 图中的 "Iron Cabinets" 指走廊中的金属柜;二者都是强毫米波反射物体,因此在 RCS-based Grid Map 中对应区域更亮。
- 这里的"定位真值"指 UE/机器人在实验平面内的参考运动轨迹;2D LiDAR 与毫米波 UE 固定在同一移动平台上,Cartographer 通过连续激光扫描匹配估计平台位姿,因此可作为 UE 轨迹的近似真值。
- 该真值不是物理意义上的绝对真实值,而是用于评估本文 LOS 粗定位结果的高精度 LiDAR SLAM 参考轨迹。
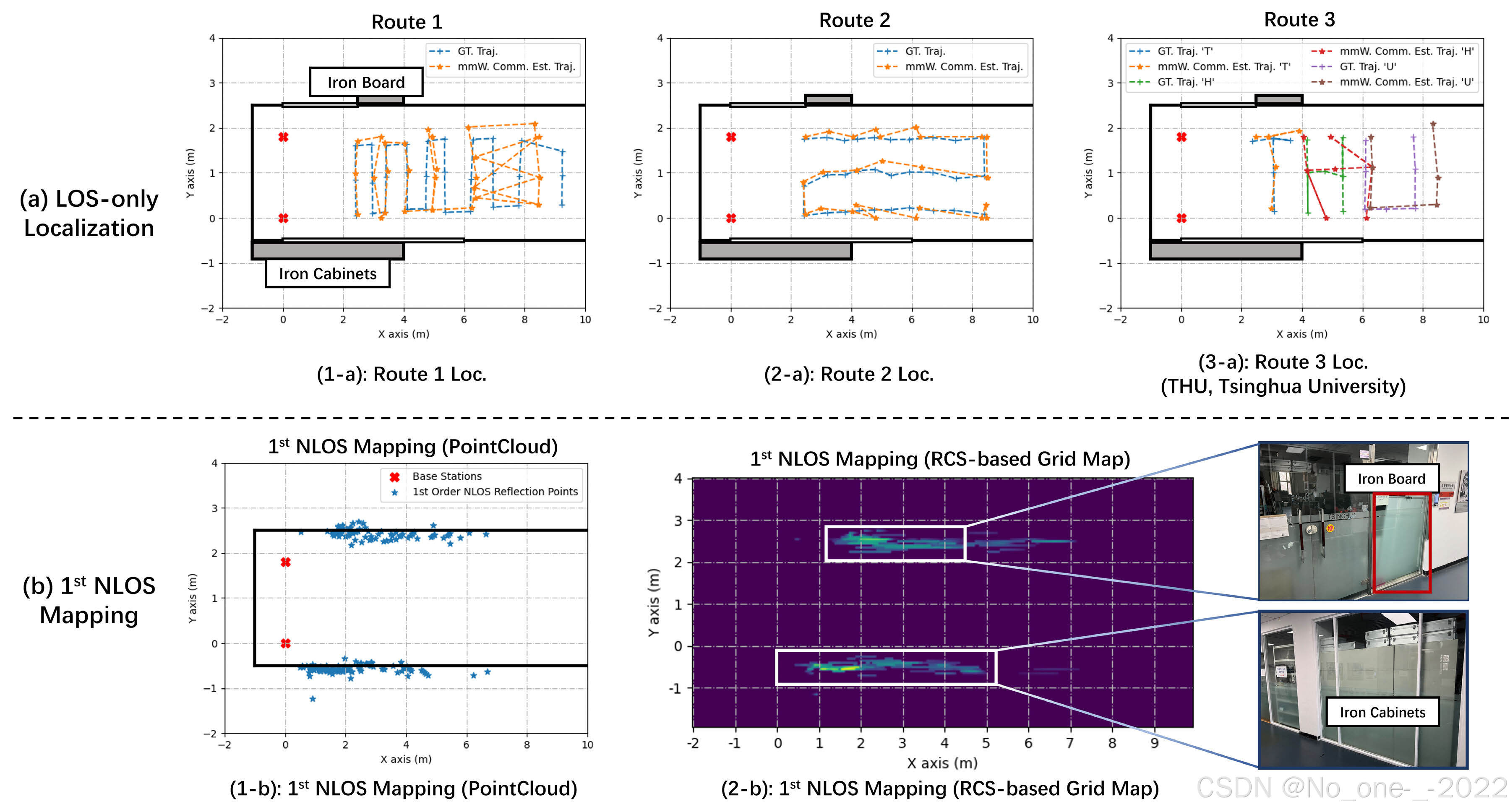
图 10. 场景 #1 中仅 LOS 定位和一阶 NLOS 建图结果。上排:三条不同路径下仅使用 LOS 路径的 UE 定位轨迹。下排:一阶 NLOS 反射点点云及对应 RCS 栅格地图。在路径 3 中,UE 沿类似 "THU" 的轨迹移动。"THU" 是作者单位清华大学的缩写。
为观察性能,本文在场景 #1 的俯视平面图上绘制了三条轨迹的粗定位结果与真值结果,如图 10(1-a)、(2-a) 和 (3-a) 所示。随着 UE 与基站之间距离增加,定位性能逐渐下降。为说明这一点,本文在图 11 中绘制了所有测量点的相对定位误差与距离的关系,并对散点进行直线拟合。这一现象是使用两条 LOS 路径定位的固有结果。尽管精度有所下降,该算法仍然有效。随着未来基站密度增加,该问题将自然缓解。
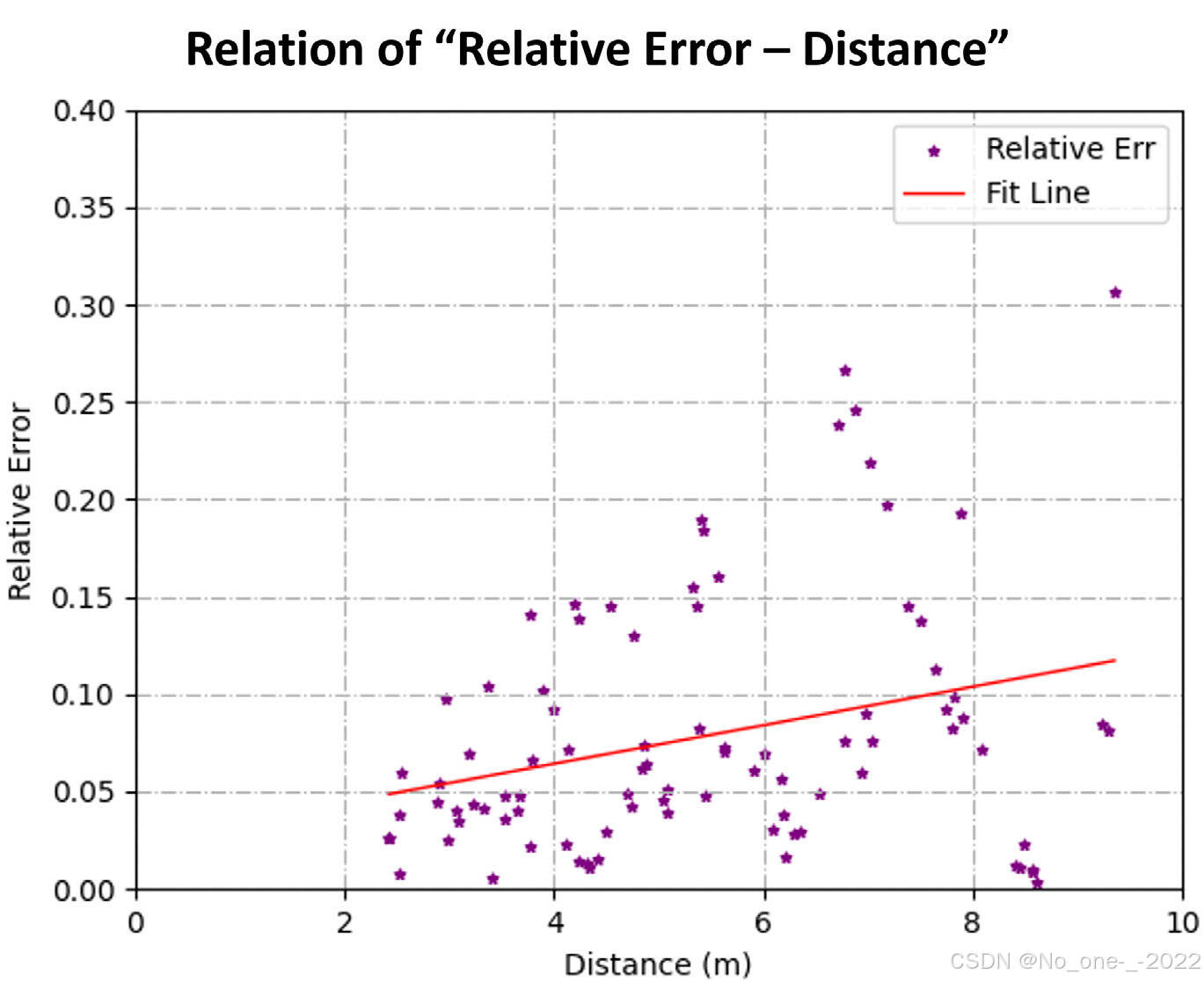
图 11. 相对误差与距离之间的关系。距离越远,相对误差越大。
此外,如图 10(1-b) 所示,本文将三条轨迹的粗建图(rough mapping)结果组合成统一散点图,其中每个散点表示从一阶 NLOS 路径提取的一个反射点。由一阶 NLOS 得到的反射点以少量异常值粗略描绘出场景 #1 的轮廓,说明所提出 LOS 和一阶 NLOS 提取算法有效。进一步地,图 10(2-b) 以 RCS 栅格地图形式展示了所提出粗建图算法(rough mapping algorithm)生成的粗建图结果。在图 10(2-b) 中,对应场景 #1 中金属柜和金属板的框选区域栅格点亮度更高,展示出材料差异。不过,尽管场景 #1 的轮廓被恢复,仅由一阶 NLOS 路径构建的粗地图对真实应用而言仍过于稀疏。
接下来,图 7 展示了三个场景中的建图轨迹真值和 EKF 融合估计轨迹。与仅由 LOS 路径得到、绝对误差可达米级的定位相比,轮式编码器和 IMU 测量与 LOS 路径融合后显著提升了定位性能。图 12 进一步以 CDF 误差图展示定位精度。EKF 融合中超过 80% 样本的误差低于 0.05 m,而仅由 LOS 路径定位时超过 80% 样本的误差为 0.75 m。仅 LOS 路径定位和 EKF 融合定位的平均绝对误差分别为 0.4575 m 和 0.0347 m,说明多传感器融合带来了明显增益。此外,EKF 融合平均绝对误差达到令人满意的厘米级,足以用于实际应用。需要注意,虽然 IMU 和轮式编码器显著提升了定位性能,来自 OFDM 通信的 LOS 路径定位仍不可或缺。不同于 IMU 和轮式编码器提供的相对位置,OFDM 通信提供绝对位置,这对于协作多用户建图以及将不重叠局部地图合并成大尺度全局地图至关重要。此外,在大尺度场景中,IMU 和轮式编码器存在漂移与累积误差,可利用 OFDM 通信得到的绝对位置有效校正。
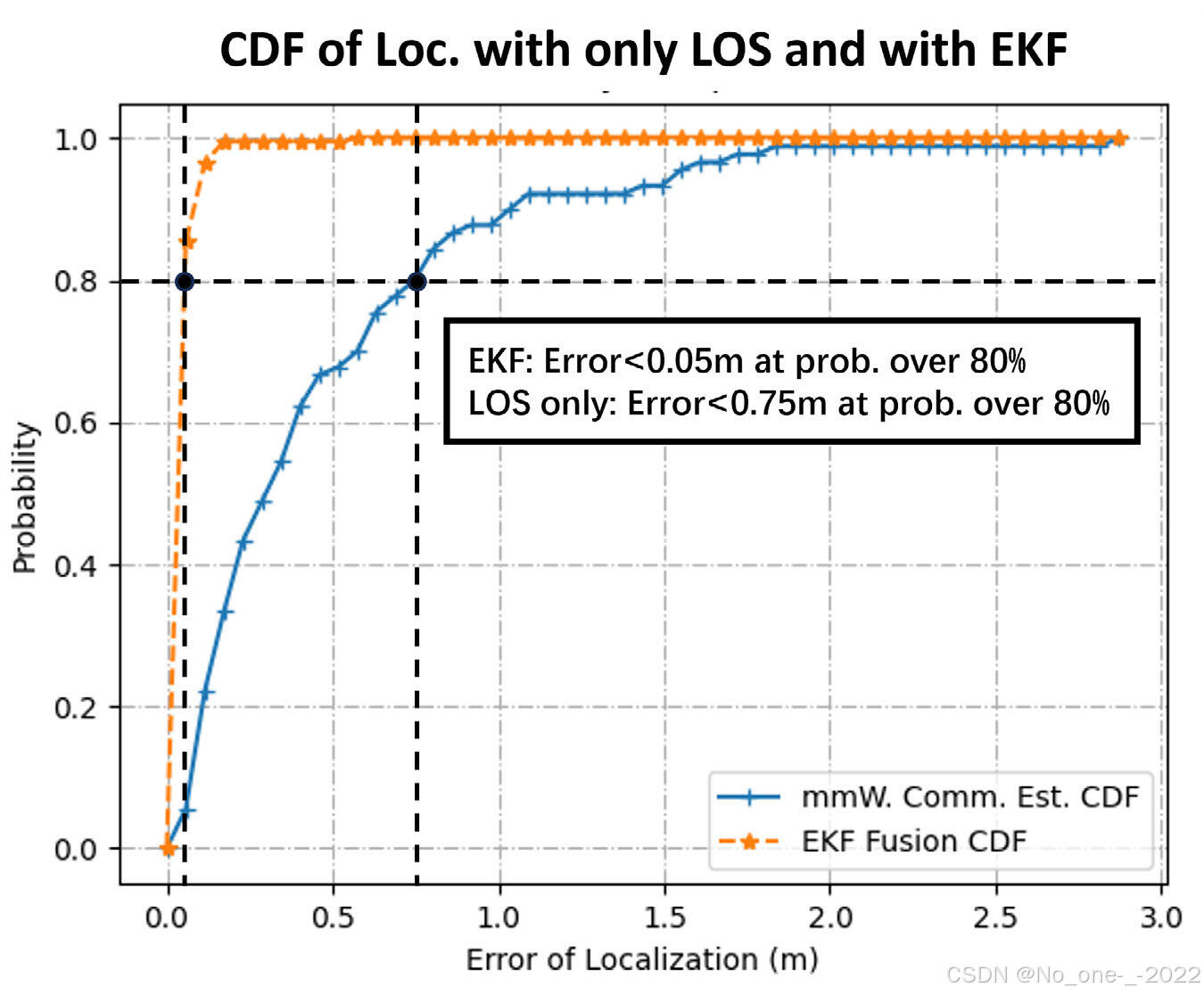
图 12. OFDM 通信期间定位误差 CDF 结果,对比是否使用 EKF 多传感器融合。
C. OFDM 感知期间的精细建图
现在展示并分析图 13 中基于类雷达波束扫描的 OFDM 感知结果。在生成图 13(1) 的实验中,本文将 TX 和 RX ULA 天线都指向天空,并将发射和接收波束方向都设置为 0°,以展示无目标情况下 OFDM 感知过程中的纯 TX-RX 直通。OFDM 感知结果信号 z i z_i zi 按式 (31) 计算,并显示于图 13(1)。可以观察到,第 47 到 50 个距离 bin 附近有明显的 TX-RX 直通主峰,主峰周围还存在多个旁瓣。如果不消除这些 TX-RX 直通,必然会产生虚假点。
注:
- 这里的"指向天空"是把 TX/RX ULA 天线整体物理转向无目标方向,并将本地波束设为 0 ∘ 0^\circ 0∘;不是指 1D ULA 在正常水平安装时进行垂直方向电子扫描。
- 本文 2D SLAM 中 ULA 主要在水平平面内扫方位角;图 13(1) 的目的只是测量无目标情况下仍会出现的 TX-RX 直通/互耦峰,以便后续从 RA 图中去除这些固定污染 bin。
本文将 CA-CFAR 的恒虚警率设置为 10 − 6 10^{-6} 10−6,并在功率补偿中设置 K c o m p = 3 K_{\mathrm{comp}}=3 Kcomp=3、 δ = 6 \delta=6 δ=6。为展示滤波与功率补偿过程,本文绘制两帧 z i z_i zi 信号及其在每个处理步骤后的结果。如图 13(2) 和图 13(3) 所示,蓝色实线表示原始 z i z_i zi 信号,橙色实线表示去除直通后的结果,绿色虚线表示 CA-CFAR 得到的滤波阈值,红色虚线表示功率补偿后的信号。橙色实线表明 TX-RX 直通已基本被消除,红色虚线表明有效目标幅度在功率补偿后显著增大。需要注意,有效目标越远,功率补偿比例越高,这与理论一致。最后,图 13(4) 展示了场景 #2 中 ISAC-SLAM 期间的一帧 RA 图 Z \mathbf{Z} Z。值得注意的是,场景 #2 的轮廓,包括距楼梯末端 7 m 的水泥墙以及距系统 2 m 的金属楼梯扶手,都被正确成像,且基本没有不需要的杂波。
注:
- 图例中的 "With Feed Through" 指包含 TX-RX 直通污染的原始回波曲线;直通是发射信号因天线互耦或硬件泄漏直接进入接收链路,并非真实环境反射。
- 蓝色实线是原始 z i z_i zi,同时包含真实目标、直通、旁瓣和噪声;橙色实线是在固定直通 bin 被替换为设备噪声后的结果,用于说明直通峰已被压制。
- 绿色虚线是 CA-CFAR 自适应检测阈值,橙色曲线中高于该阈值的峰更可能被保留为有效目标;红色虚线是在此基础上进行距离功率补偿后的信号,远距离有效目标会被放大更多。
- 图 13(2) 和图 13(3) 中的 Example 1/2 是 UE 侧 OFDM sensing 过程中选取的两帧代表性 z i z_i zi 距离向信号;每个 z i z_i zi 对应某个 TX/RX 同向感知波束 θ i \theta_i θi 下的回波处理结果,不是完整 RA 图,也不是原始 ADC 时域波形。
- 图中横轴 "Time Samples" 指式 (31) 中对子载波/频率维做 IDFT 后得到的离散时延采样点;在单基地雷达中这些时延采样可换算为距离 bin,因此正文也称第 47-50 个 range bin。
- 图 13(4) 中"基本没有不需要的杂波"不是因为只保留一次反射,而是因为 RA 图先去除 TX-RX 直通,再用 CA-CFAR 筛掉低于阈值的噪声/旁瓣/弱杂波,并进一步用 KNN 去除离散异常点。
- KNN(K-nearest neighbors,K 近邻)异常点剔除的直观含义是:真实墙面、扶手等目标通常形成相邻点簇,孤立且远离主要点簇的小亮点更可能是多次反射或测量误差造成的杂波,因此会被判为异常值并删除。
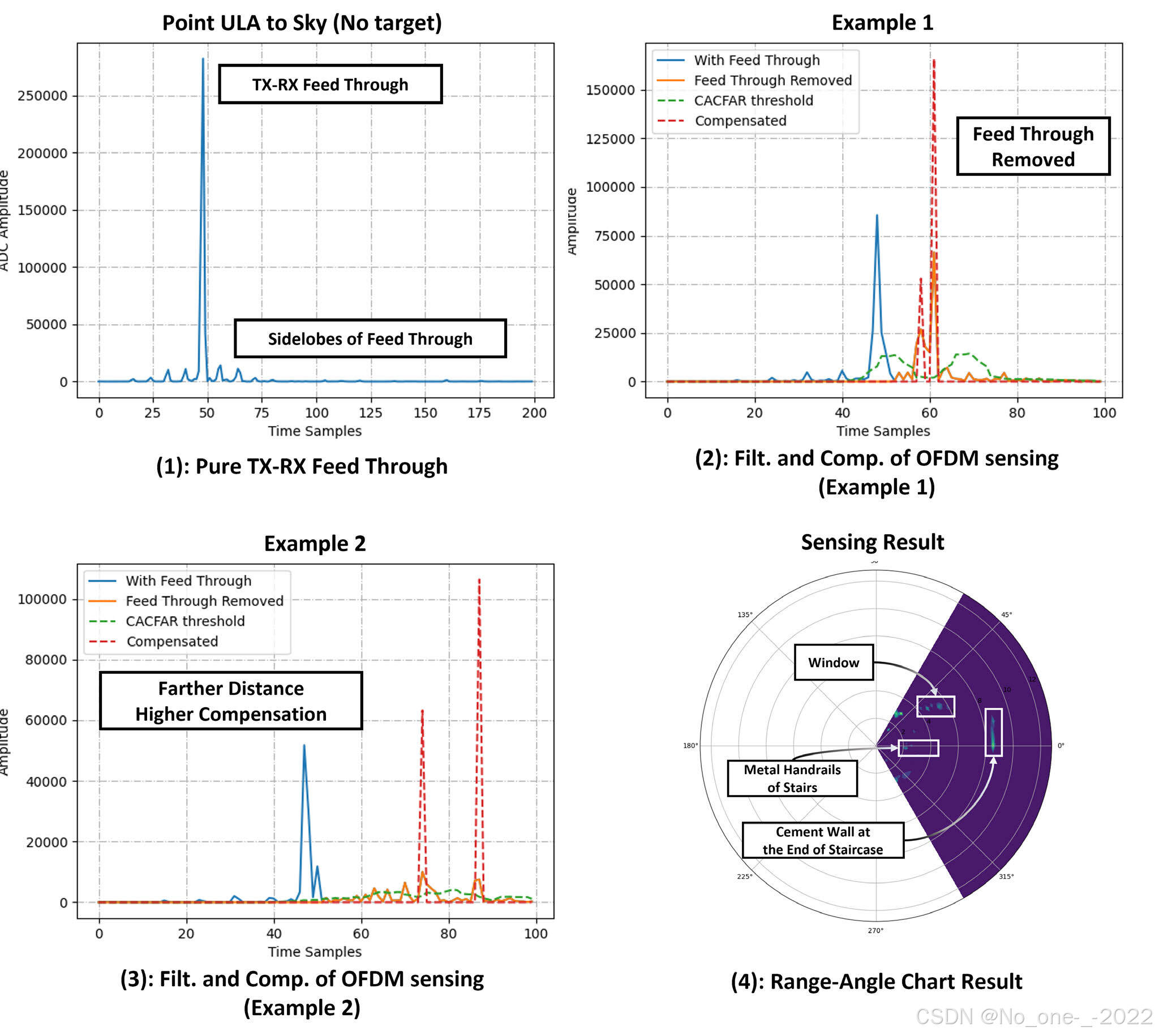
图 13. OFDM 感知中 TX-RX 直通去除与功率补偿示意:(1)纯 TX-RX 直通模式;(2)-(3)连续滤波和补偿后的信号;(4)得到的 RA 图。
如图 7 所示,本文展示了毫米波 ISAC-SLAM 在三个场景中构建的局部 RCS 栅格地图,以及 2D LiDAR Cartographer 构建的局部地图。局部地图能够成功描述玻璃墙轮廓,而 LiDAR 会穿透玻璃部分,导致建图失败。此外,局部地图展示了物体材料。较亮栅格通常对应金属和玻璃物体,较暗栅格对应水泥和木质物体。与仅由 OFDM 通信期间一阶 NLOS 路径构建的地图相比,同时融合 OFDM 通信和感知期间构建地图得到的局部地图更密集,轮廓也更精确。
本文提取每个局部地图中 RCS 值高于该局部地图最大 RCS 值 15% 的所有栅格点,并将这些提取出的栅格点绘制为所提出毫米波 ISAC-SLAM 的点云。图 7 同时展示了毫米波 ISAC-SLAM 点云和 2D LiDAR Cartographer 点云,毫米波 ISAC-SLAM 点云与 2D LiDAR Cartographer 点云处于相同精度水平。
D. 全局地图拼接
图 14 展示了由三个场景局部地图拼接得到的全局地图。最左侧地图是未使用拼接算法生成的全局地图。可以看到,场景 #1 的 RCS 栅格地图完全被场景 #2 和 #3 的地图覆盖,因为场景 #1 的平均 RCS 值显著更低。所提出拼接方法能够正确合并局部地图,如中间地图所示,并且材料与轮廓特征仍能在拼接后的全局地图中正确显示。
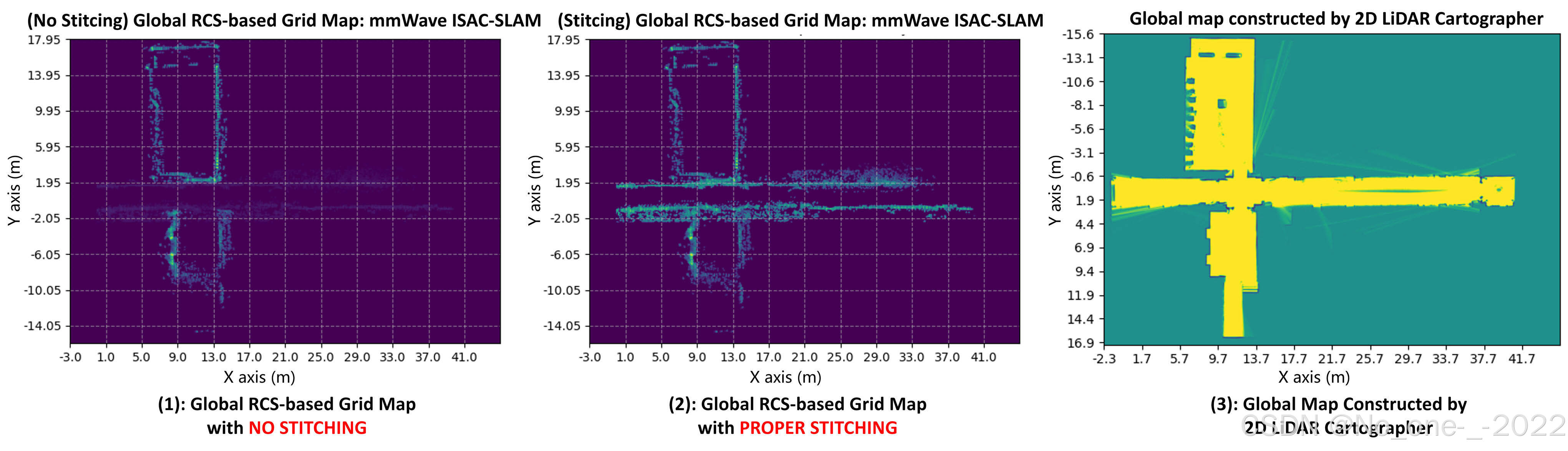
图 14. 使用和不使用地图拼接算法的 RCS 全局栅格地图,并与 2D LiDAR Cartographer 对比。
本文评估毫米波 ISAC-SLAM 点云与 2D LiDAR Cartographer 点云之间的误差。对毫米波 ISAC-SLAM 点云中的每个点,计算其与 Cartographer 点云中最近点之间的距离,并将该距离作为误差指标。如图 15 所示,在超过 80% 的概率下,建图误差低于 0.445 m;全局地图平均误差为 0.261 m,约为 820 MHz 带宽所限制距离分辨率的 1.4 倍。
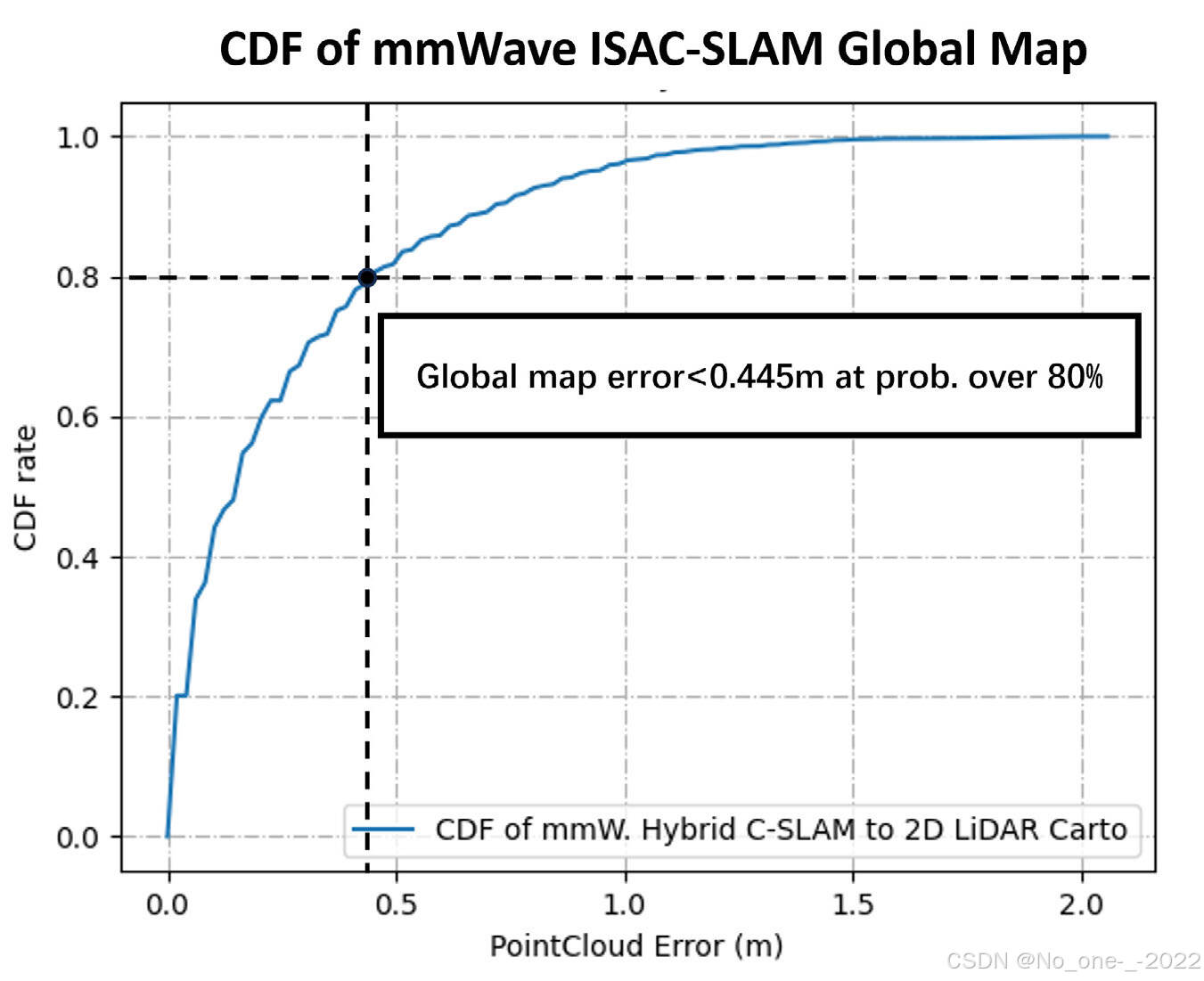
图 15. RCS 全局栅格地图的 CDF 结果。
VI. 结论
本文提出了毫米波 ISAC-SLAM 的框架和原型,并在多个复杂室内实验中验证了原型。本文提出时分 ISAC 协议,使用户能够同时执行 OFDM 通信和感知。在 OFDM 通信期间,本文设计 LOS 与一阶 NLOS 路径提取算法,并设计将 LOS 路径与 IMU、轮式编码器融合的算法,实现精确自定位。对一阶 NLOS 路径,本文设计反射平面恢复算法,从而构建粗地图。在 OFDM 感知期间,用户作为单基地 OFDM 雷达工作,获得 RA 图,并采用多种滤波和功率补偿方法进行建图。每个用户融合由通信和感知共同得到的地图生成局部地图。在中央基站处,本文设计拼接算法合并各个局部地图,最终构建全局地图。本文在基于 Xilinx RFSoC 的真实世界原型上实现该框架。通过在三个复杂场景中的测试,所提出 ISAC-SLAM 原型实现了 0.0347 m 的定位平均绝对误差和 0.2610 m 的建图平均绝对误差。本文采用 RCS 栅格地图作为建图模型,构建的全局地图同时包含场景中的轮廓和材料信息,展示出很高的实用性。
参考文献
参考文献条目按原文保留。
1 F. Liu et al., "Integrated sensing and communications: Toward dual-functional wireless networks for 6G and beyond," IEEE J. Sel. Areas Commun., vol. 40, no. 6, pp. 1728-1767, Jun. 2022.
2 Y. Cui, F. Liu, X. Jing, and J. Mu, "Integrating sensing and communications for ubiquitous IoT: Applications, trends, and challenges," IEEE Netw., vol. 35, no. 5, pp. 158-167, Sep. 2021.
3 C. Cadena et al., "Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age," IEEE Trans. Robot., vol. 32, no. 6, pp. 1309-1332, Dec. 2016.
4 G. Grisetti, R. Kuemmerle, C. Stachniss, and W. Burgard, "A tutorial on graph-based SLAM," IEEE Intell. Transp. Syst. Mag., vol. 2, no. 4, pp. 31-43, Winter 2010.
5 B. Amjad, Q. Z. Ahmed, P. I. Lazaridis, M. Hafeez, F. A. Khan, and Z. D. Zaharis, "Radio SLAM: A review on radio-based simultaneous localization and mapping," IEEE Access, vol. 11, pp. 9260-9278, 2023.
6 M. Lotti, G. Pasolini, A. Guerra, F. Guidi, R. D'Errico, and D. Dardari, "Radio SLAM for 6G systems at THz frequencies: Design and experimental validation," IEEE J. Sel. Topics Signal Process., vol. 17, no. 4, pp. 834-849, Jul. 2023.
7 C. Baquero Barneto et al., "Millimeter-wave mobile sensing and environment mapping: Models, algorithms and validation," IEEE Trans. Veh. Technol., vol. 71, no. 4, pp. 3900-3916, Apr. 2022.
8 C. B. Barneto, T. Riihonen, M. Turunen, M. Koivisto, J. Talvitie, and M. Valkama, "Radio-based sensing and indoor mapping with millimeter-wave 5G NR signals," in Proc. Int. Conf. Localization GNSS (ICL-GNSS), Jun. 2020, pp. 1-5.
9 J. Guan, A. Paidimarri, A. Valdes-Garcia, and B. Sadhu, "3-D imaging using millimeter-wave 5G signal reflections," IEEE Trans. Microw. Theory Techn., vol. 69, no. 6, pp. 2936-2948, Jun. 2021.
10 F. Guidi, A. Mariani, A. Guerra, D. Dardari, A. Clemente, and R. D'Errico, "Indoor environment-adaptive mapping with beamsteering massive arrays," IEEE Trans. Veh. Technol., vol. 67, no. 10, pp. 10139-10143, Oct. 2018.
11 F. Guidi, A. Guerra, and D. Dardari, "Millimeter-wave massive arrays for indoor SLAM," in Proc. IEEE Int. Conf. Commun. Workshops (ICC), Jun. 2014, pp. 114-120.
12 F. Guidi, A. Guerra, and D. Dardari, "Personal mobile radars with millimeter-wave massive arrays for indoor mapping," IEEE Trans. Mobile Comput., vol. 15, no. 6, pp. 1471-1484, Jun. 2016.
13 F. Guidi, A. Guerra, D. Dardari, A. Clemente, and R. D'Errico, "Environment mapping with millimeter-wave massive arrays: System design and performance," in Proc. IEEE Globecom Workshops (GC Wkshps), Dec. 2016, pp. 1-6.
14 M. Yin et al., "Millimeter wave wireless assisted robot navigation with link state classification," IEEE Open J. Commun. Soc., vol. 3, pp. 493-507, 2022.
15 Z. Mou and F. Gao, "Millimeter wave wireless communication assisted three-dimensional simultaneous localization and mapping," 2023, arXiv:2303.02617.
16 J. Kulmer, E. Leitinger, S. Grebien, and K. Witrisal, "Anchorless cooperative tracking using multipath channel information," IEEE Trans. Wireless Commun., vol. 17, no. 4, pp. 2262-2275, Apr. 2018.
17 M. Ruble and I. Guvenc, "Wireless localization for mmWave networks in urban environments," EURASIP J. Adv. Signal Process., vol. 2018, no. 1, pp. 1-19, Dec. 2018.
18 J. Palacios, G. Bielsa, P. Casari, and J. Widmer, "Communication-driven localization and mapping for millimeter wave networks," in Proc. IEEE INFOCOM - IEEE Conf. Comput. Commun., Apr. 2018, pp. 2402-2410.
19 J. Palacios, P. Casari, and J. Widmer, "JADE: Zero-knowledge device localization and environment mapping for millimeter wave systems," in Proc. IEEE Conf. Comput. Commun., May 2017, pp. 1-9.
20 A. Fascista, A. Coluccia, H. Wymeersch, and G. Seco-Granados, "Downlink single-snapshot localization and mapping with a single-antenna receiver," IEEE Trans. Wireless Commun., vol. 20, no. 7, pp. 4672-4684, Jul. 2021.
21 Y. Sun et al., "An indoor environment sensing and localization system via mmWave phased array," J. Commun. Inf. Netw., vol. 7, no. 4, pp. 383-393, Dec. 2022.
22 Y. Ge, H. Kim, F. Wen, L. Svensson, S. Kim, and H. Wymeersch, "Exploiting diffuse multipath in 5G SLAM," in Proc. IEEE Global Commun. Conf. (GLOBECOM), Dec. 2020, pp. 1-6.
23 J. Yang, C.-K. Wen, S. Jin, and X. Li, "Enabling plug-and-play and crowdsourcing SLAM in wireless communication systems," IEEE Trans. Wireless Commun., vol. 21, no. 3, pp. 1453-1468, Mar. 2022.
24 H. Que, J. Yang, C.-K. Wen, S. Xia, X. Li, and S. Jin, "Joint beam management and SLAM for mmWave communication systems," IEEE Trans. Commun., vol. 71, no. 10, pp. 6162-6179, Oct. 2023.
25 J. Yang, C.-K. Wen, J. Xu, H. Que, H. Wei, and S. Jin, "Angle-based SLAM on 5G mmWave systems: Design, implementation, and measurement," IEEE Internet Things J., vol. 10, no. 20, pp. 17755-17771, Oct. 2023.
26 S. Kohlbrecher, O. Von Stryk, J. Meyer, and U. Klingauf, "A flexible and scalable SLAM system with full 3D motion estimation," in Proc. IEEE Int. Symp. Saf., Secur., Rescue Robot., Nov. 2011, pp. 155-160.
27 W. Hess, D. Kohler, H. Rapp, and D. Andor, "Real-time loop closure in 2D LiDAR SLAM," in Proc. IEEE Int. Conf. Robot. Autom. (ICRA), May 2016, pp. 1271-1278.
28 T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, "LIO-SAM: Tightly-coupled LiDAR inertial odometry via smoothing and mapping," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), Oct. 2020, pp. 5135-5142.
29 R. Mur-Artal, J. M. M. Montiel, and J. D. Tardos, "ORB-SLAM: A versatile and accurate monocular SLAM system," IEEE Trans. Robot., vol. 31, no. 5, pp. 1147-1163, Oct. 2015.
30 R. Mur-Artal and J. D. Tardos, "ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras," IEEE Trans. Robot., vol. 33, no. 5, pp. 1255-1262, Oct. 2017.
31 T. Qin, P. Li, and S. Shen, "VINS-mono: A robust and versatile monocular visual-inertial state estimator," IEEE Trans. Robot., vol. 34, no. 4, pp. 1004-1020, Aug. 2018.
32 J. Yang, X. Yang, C.-K. Wen, and S. Jin, "Integrated sensing and communication with multi-domain cooperation," 2021, arXiv:2105.03065.
33 J. Yang, C.-K. Wen, and S. Jin, "Hybrid active and passive sensing for SLAM in wireless communication systems," IEEE J. Sel. Areas Commun., vol. 40, no. 7, pp. 2146-2163, Jul. 2022.
34 M. Quigley et al., "ROS: An open-source robot operating system," in Proc. ICRA Workshop Open Source Softw., 2009, vol. 3, no. 3, p. 5.
35 M. Polese, M. Giordani, M. Mezzavilla, S. Rangan, and M. Zorzi, "Improved handover through dual connectivity in 5G mmWave mobile networks," IEEE J. Sel. Areas Commun., vol. 35, no. 9, pp. 2069-2084, Sep. 2017.
36 X. Zhang et al., "Improving network throughput in 60GHz WLANs via multi-AP diversity," in Proc. IEEE Int. Conf. Commun. (ICC), Jun. 2012, pp. 4803-4807.
37 A. Ghosh et al., "Millimeter-wave enhanced local area systems: A high-data-rate approach for future wireless networks," IEEE J. Sel. Areas Commun., vol. 32, no. 6, pp. 1152-1163, Jun. 2014.
38 V. Raghavan et al., "Statistical blockage modeling and robustness of beamforming in millimeter-wave systems," IEEE Trans. Microw. Theory Techn., vol. 67, no. 7, pp. 3010-3024, Jul. 2019.
39 G. R. MacCartney and T. S. Rappaport, "Millimeter-wave base station diversity for 5G coordinated multipoint (CoMP) applications," IEEE Trans. Wireless Commun., vol. 18, no. 7, pp. 3395-3410, Jul. 2019.
40 J. He, W. Cheng, Z. Tang, D. Lopez-Perez, and H. Claussen, "Analytical evaluation of higher order sectorization, frequency reuse, and user classification methods in OFDMA networks," IEEE Trans. Wireless Commun., vol. 15, no. 12, pp. 8209-8222, Dec. 2016.
41 A. M. Sayeed, "Deconstructing multiantenna fading channels," IEEE Trans. Signal Process., vol. 50, no. 10, pp. 2563-2579, Oct. 2002.
42 Y.-N.-R. Li, B. Gao, X. Zhang, and K. Huang, "Beam management in millimeter-wave communications for 5G and beyond," IEEE Access, vol. 8, pp. 13282-13293, 2020.
43 Y. Zeng et al., "A tutorial on environment-aware communications via channel knowledge map for 6G," IEEE Commun. Surveys Tuts., vol. 26, no. 3, pp. 1478-1519, 3rd Quart., 2024.
44 C. Huang et al., "Machine learning-enabled LOS/NLOS identification for MIMO systems in dynamic environments," IEEE Trans. Wireless Commun., vol. 19, no. 6, pp. 3643-3657, Jun. 2020.
45 G. P. C. Junior et al., "EKF-LOAM: An adaptive fusion of LiDAR SLAM with wheel odometry and inertial data for confined spaces with few geometric features," IEEE Trans. Autom. Sci. Eng., vol. 19, no. 3, pp. 1458-1471, Jul. 2022.
46 C. Sturm and W. Wiesbeck, "Waveform design and signal processing aspects for fusion of wireless communications and radar sensing," Proc. IEEE, vol. 99, no. 7, pp. 1236-1259, Jul. 2011.
作者简介
Tengyu Zhang(IEEE 研究生学生会员)于 2022 年获得清华大学自动化系工学学士学位,目前在清华大学自动化系攻读博士学位,导师为高飞飞教授。其研究兴趣包括异构 SoC 原型、无线通信系统、雷达系统以及感知与通信一体化。
Xinyi Du 目前在武汉大学攻读学士学位。其研究兴趣包括无线通信系统、雷达系统以及感知与通信一体化。
Ruixuan Zhang 于 2025 年获得清华大学自动化系工学学士学位。其研究兴趣包括无线通信系统、雷达系统以及感知与通信一体化。
Shaodan Ma(IEEE 高级会员)分别于 1999 年和 2002 年获得南开大学理学与经济学双学士学位以及电子工程硕士学位,并于 2006 年获得香港大学电气与电子工程博士学位。2006 年至 2011 年,她在香港大学担任博士后研究员。自 2011 年 8 月起,她任职于澳门大学,目前为教授。其研究兴趣包括阵列信号处理、收发机设计、定位、感知与通信一体化、毫米波/太赫兹通信、大规模 MIMO 以及通信中的机器学习。她曾担任多个会议的分会主席,包括 IEEE VTC2024-Spring、IEEE ICC 2021/2016/2019、IEEE GLOBECOM 2016 和 IEEE/CIC ICCC 2019。她是 2024 年和 2025 年 IEEE ComSoc 杰出演讲人,并担任多个 IEEE 期刊编辑。
Feifei Gao(IEEE 会士)于 2002 年获得西安交通大学工学学士学位,2004 年获得加拿大麦克马斯特大学理学硕士学位,2007 年获得新加坡国立大学博士学位。自 2011 年起,他任职于清华大学自动化系,目前为长聘正教授。他已发表或合著 200 余篇 IEEE 期刊论文和 150 余篇 IEEE 会议论文,Google Scholar 引用超过 25000 次。其研究兴趣包括通信信号处理、阵列信号处理、凸优化和人工智能辅助通信。他曾任多个 IEEE 期刊编辑和多个 IEEE 会议分会主席,并担任 50 余个 IEEE 会议技术委员会成员。