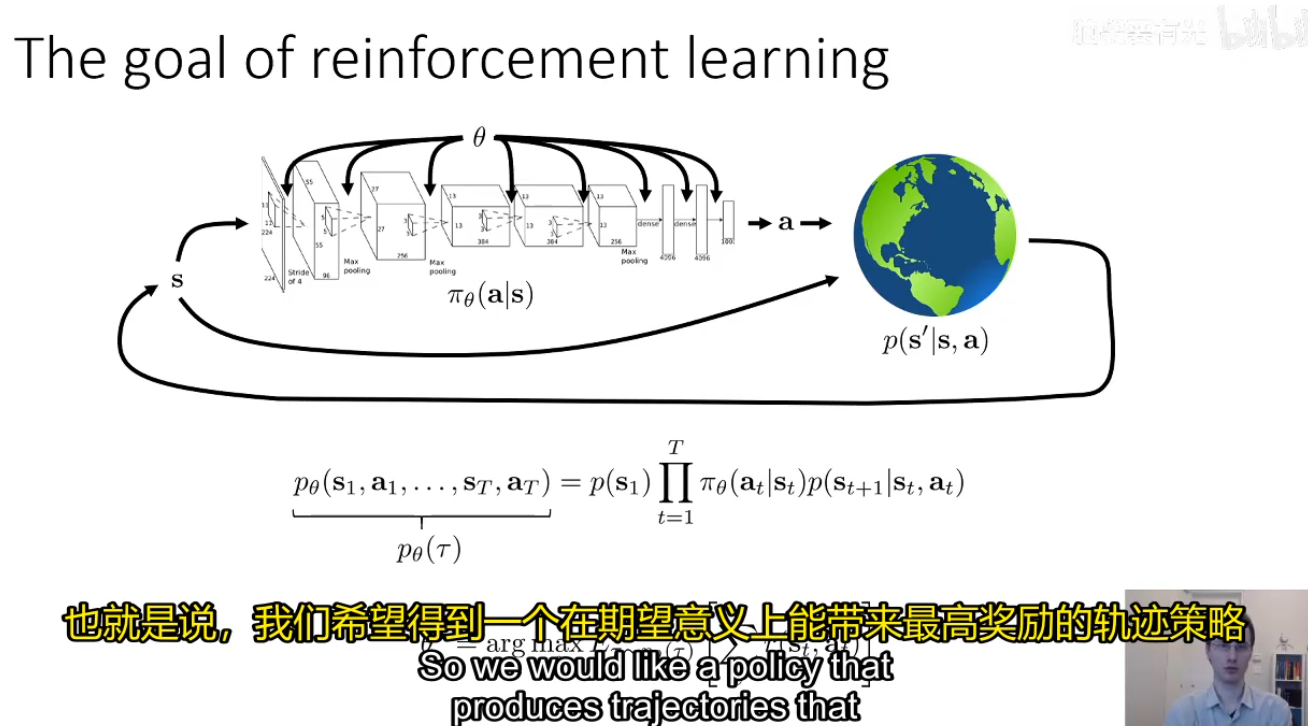
图1:深度强化学习智能体与环境交互示意图。该图展示了强化学习的核心交互循环:智能体(Agent)观察环境状态(State),基于策略(Policy)选择动作(Action),环境接收动作后转移到新状态并给出奖励(Reward)。智能体的目标是学习最优策略以最大化长期累积奖励。

图2:PPO算法训练曲线或网络架构示意图。如果是训练曲线,展示了平均回报随训练步数的变化趋势,反映了算法的收敛性和稳定性;如果是网络架构图,则展示了PPO算法中策略网络(Actor)和价值网络(Critic)的结构,以及可能的特征共享层设计。
1. 强化学习定义
本文通过两张示意图引出了深度强化学习的核心概念与实践流程。第一张图阐述了智能体与环境交互的基本范式,这是所有强化学习算法的理论基础。第二张图则可能展示了具体算法(如 PPO)的训练动态或网络架构,为理解算法实现提供了直观参考。
随后,我们详细拆解了实现深度强化学习项目的关键操作步骤,从环境搭建、智能体设计到数据收集与策略更新,形成了一个完整的闭环。掌握这些技术点与步骤,有助于读者从理论过渡到实践,逐步构建和优化自己的强化学习智能体。
深度强化学习仍在快速发展,结合更强大的网络架构(如 Transformer)、更高效的探索机制以及离线强化学习等新技术,将在机器人控制、游戏 AI、自动驾驶等领域持续创造价值。
第一张图片展示了深度强化学习(Deep Reinforcement Learning, DRL)中智能体与环境交互的基本框架。图中清晰地划分了智能体(Agent)、环境(Environment)、状态(State)、动作(Action)和奖励(Reward)这几个核心组件。其技术要点在于理解这是一个闭环反馈系统:智能体根据当前状态选择动作,环境接收动作后转移到下一个状态并给出奖励,智能体的目标就是学习一个策略(Policy),以最大化长期累积奖励。现代深度强化学习算法(如 DQN、PPO)正是利用深度神经网络来近似这个策略函数或价值函数,从而处理高维状态空间(如图像输入)。
第二张图片则可能呈现了某个具体算法(例如近端策略优化 PPO)的训练曲线或网络结构图。如果它是训练曲线,那么横轴通常是训练步数(steps)或回合数(episodes),纵轴可能是平均回报(average return)。图中上升或波动的趋势直观反映了算法学习的效果和稳定性。如果它是网络结构图,则展示了智能体内部价值网络(Value Network)和策略网络(Policy Network)的架构,以及它们如何共享特征提取层(Shared Backbone)。理解这些可视化图表对于调试模型、选择超参数(如学习率、折扣因子)至关重要。
关键操作步骤
基于上述框架,实现一个基本的深度强化学习项目通常包含以下步骤:
-
环境搭建:使用 OpenAI Gym、MuJoCo 或自定义环境定义状态空间、动作空间和奖励函数。
pythonimport gym import numpy as np # 1. 创建经典控制环境(例如 CartPole) env = gym.make('CartPole-v1') # 2. 查看环境的基本信息 print(f"状态空间: {env.observation_space}") # 例如 Box(4,) print(f"动作空间: {env.action_space}") # 例如 Discrete(2) # 3. 重置环境,获取初始状态 state = env.reset() print(f"初始状态: {state}") # 4. 与环境交互一个步骤的示例 action = env.action_space.sample() # 随机选择一个动作 next_state, reward, done, info = env.step(action) print(f"执行动作: {action}, 奖励: {reward}, 是否结束: {done}") # 5. 关闭环境(重要) env.close() # 注:对于连续动作空间环境(如 MuJoCo),动作空间类型为 Box # 自定义环境需继承 gym.Env 并实现 reset() 和 step() 方法 -
智能体设计:选择算法(如 PPO),并搭建相应的神经网络。通常包括:
pythonimport torch import torch.nn as nn import torch.nn.functional as F class ActorNetwork(nn.Module): """策略网络(Actor):输入状态,输出动作的概率分布""" def __init__(self, state_dim, action_dim, hidden_dim=64): super(ActorNetwork, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, hidden_dim) self.fc3 = nn.Linear(hidden_dim, action_dim) # 输出动作 logits def forward(self, state): x = F.relu(self.fc1(state)) x = F.relu(self.fc2(x)) logits = self.fc3(x) # 未归一化的 logits return logits class CriticNetwork(nn.Module): """价值网络(Critic):输入状态,评估当前状态的价值""" def __init__(self, state_dim, hidden_dim=64): super(CriticNetwork, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, hidden_dim) self.fc3 = nn.Linear(hidden_dim, 1) # 输出状态价值 def forward(self, state): x = F.relu(self.fc1(state)) x = F.relu(self.fc2(x)) value = self.fc3(x) # 标量状态价值 return value # 使用示例(假设环境为 CartPole-v1) state_dim = 4 # CartPole 的状态维度 action_dim = 2 # CartPole 的动作空间大小(离散2个动作) actor = ActorNetwork(state_dim, action_dim) critic = CriticNetwork(state_dim) # 前向传播示例 dummy_state = torch.randn(1, state_dim) # 批量大小为1 action_logits = actor(dummy_state) state_value = critic(dummy_state) print(f"动作 logits 形状: {action_logits.shape}") # [1, 2] print(f"状态价值形状: {state_value.shape}") # [1, 1] # 注:实际 PPO 实现中,两个网络可能共享部分底层特征提取层 # 此处为清晰起见,将 Actor 和 Critic 设计为独立网络- 策略网络(Actor):输入状态,输出动作的概率分布。
- 价值网络(Critic):输入状态,评估当前状态的价值。
-
数据收集:让智能体在环境中运行,收集状态、动作、奖励、下一状态的数据序列(trajectories)。
-
优势估计:使用广义优势估计(GAE)等方法计算每个时间步的优势函数,衡量动作的相对好坏。
-
策略更新:计算策略梯度,并使用 PPO 的裁剪(Clipping)机制或信任域方法更新策略网络参数,确保更新步幅不会太大。
-
价值函数更新:通过最小化价值网络的预测值与实际回报(或 TD 目标)之间的均方误差来更新价值网络。
-
迭代与评估:重复步骤 3-6,定期在测试环境中评估智能体的性能,并保存最佳模型。
图3:数据收集与轨迹采样示意图。展示了智能体在环境中执行多个episode,收集状态-动作-奖励序列(轨迹)的过程。这些轨迹数据用于后续的策略评估和更新。
图4:优势估计与策略更新流程图。展示了如何从收集的轨迹中计算优势函数(Advantage Function),并使用PPO的裁剪机制更新策略网络参数,确保更新步幅在信任域内。
2. 强化学习算法
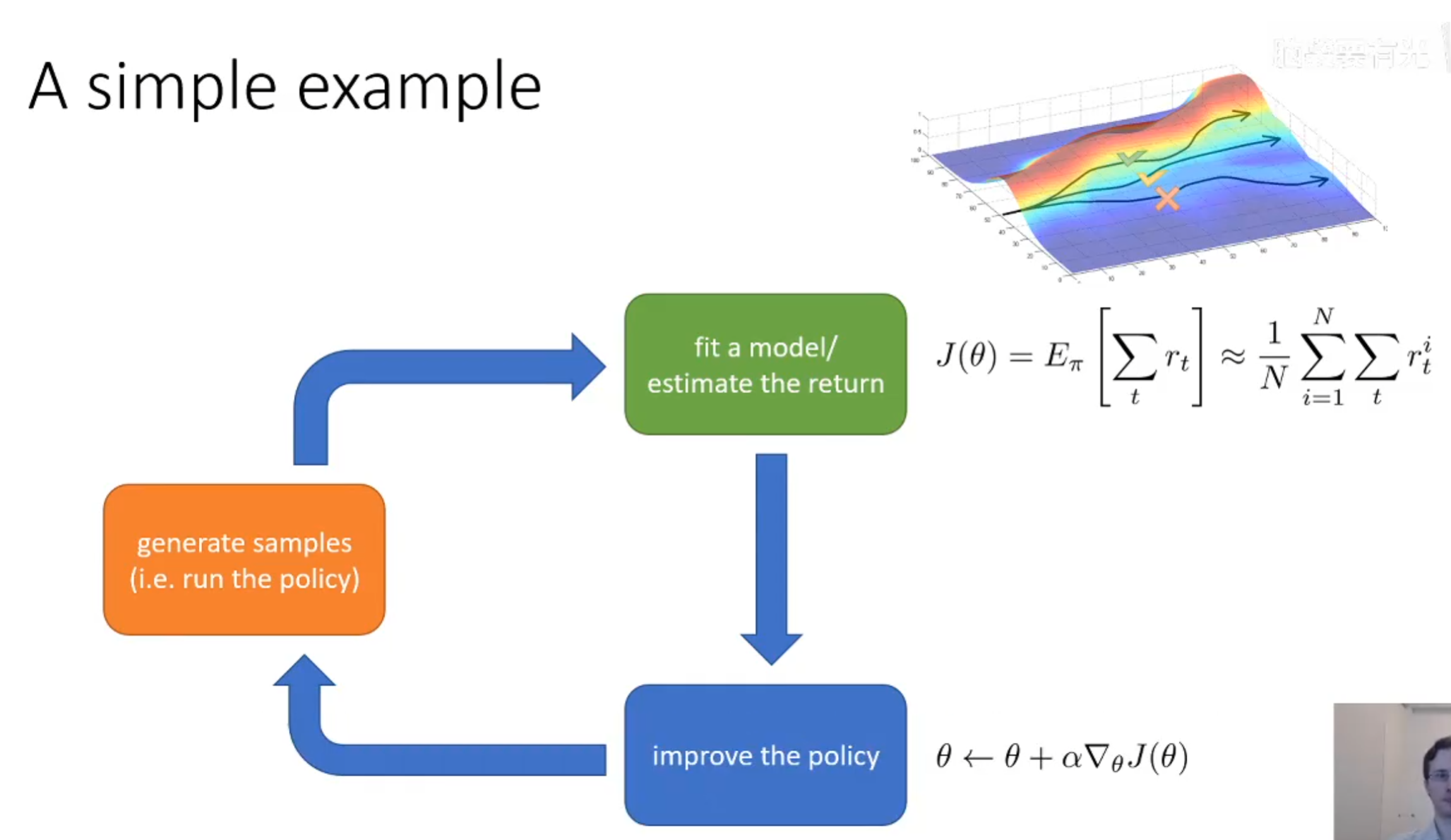
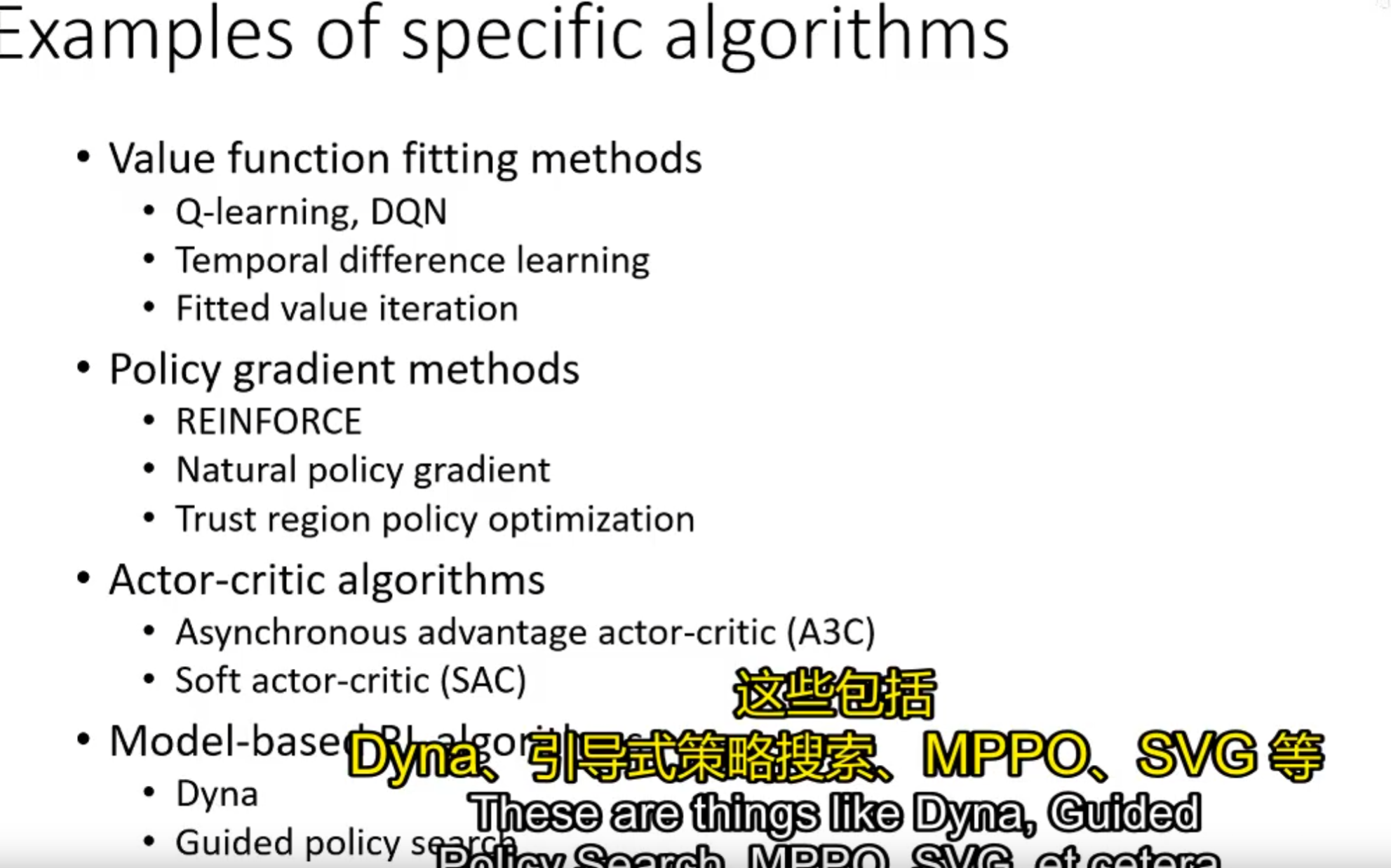
图5:强化学习算法分类与比较图。展示了强化学习算法的分类体系,包括基于值函数的方法(如Q-learning、DQN)、基于策略的方法(如REINFORCE、PPO),以及结合两者的Actor-Critic方法。
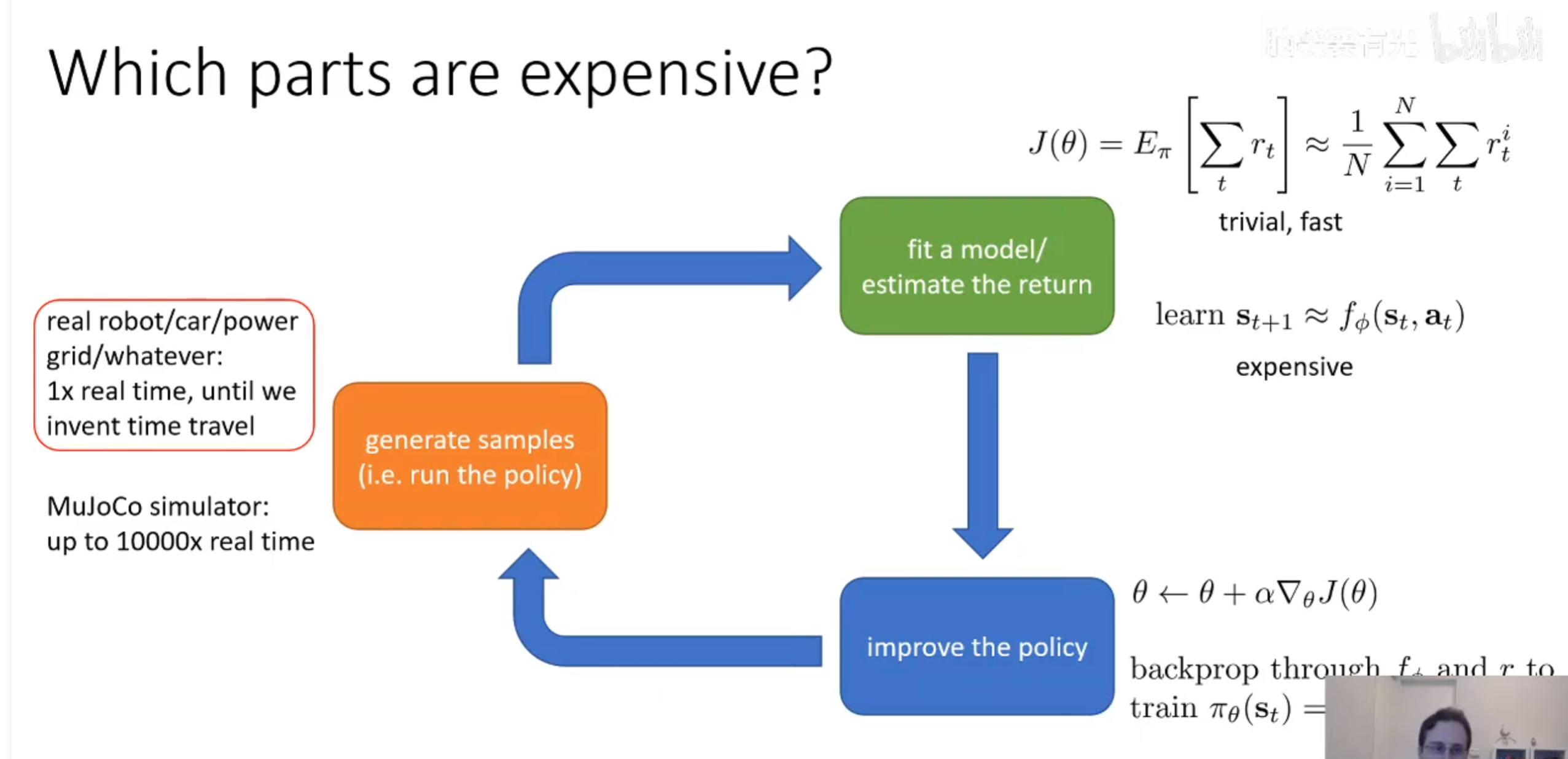
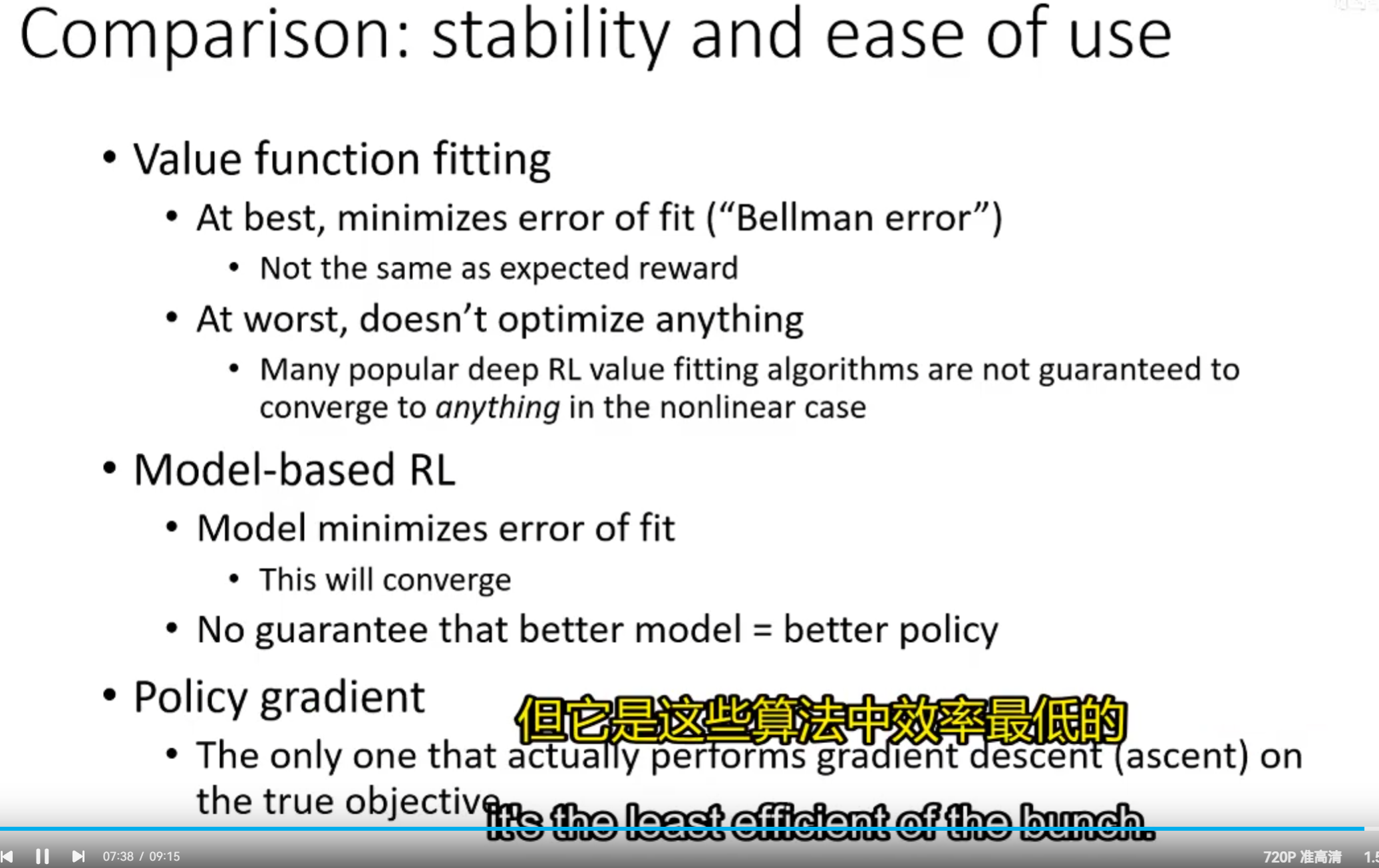
图6:基于值函数与基于策略的算法对比图。对比了两类算法的核心思想、优缺点和适用场景,帮助读者根据具体问题选择合适的算法类型。
2.1 价值函数
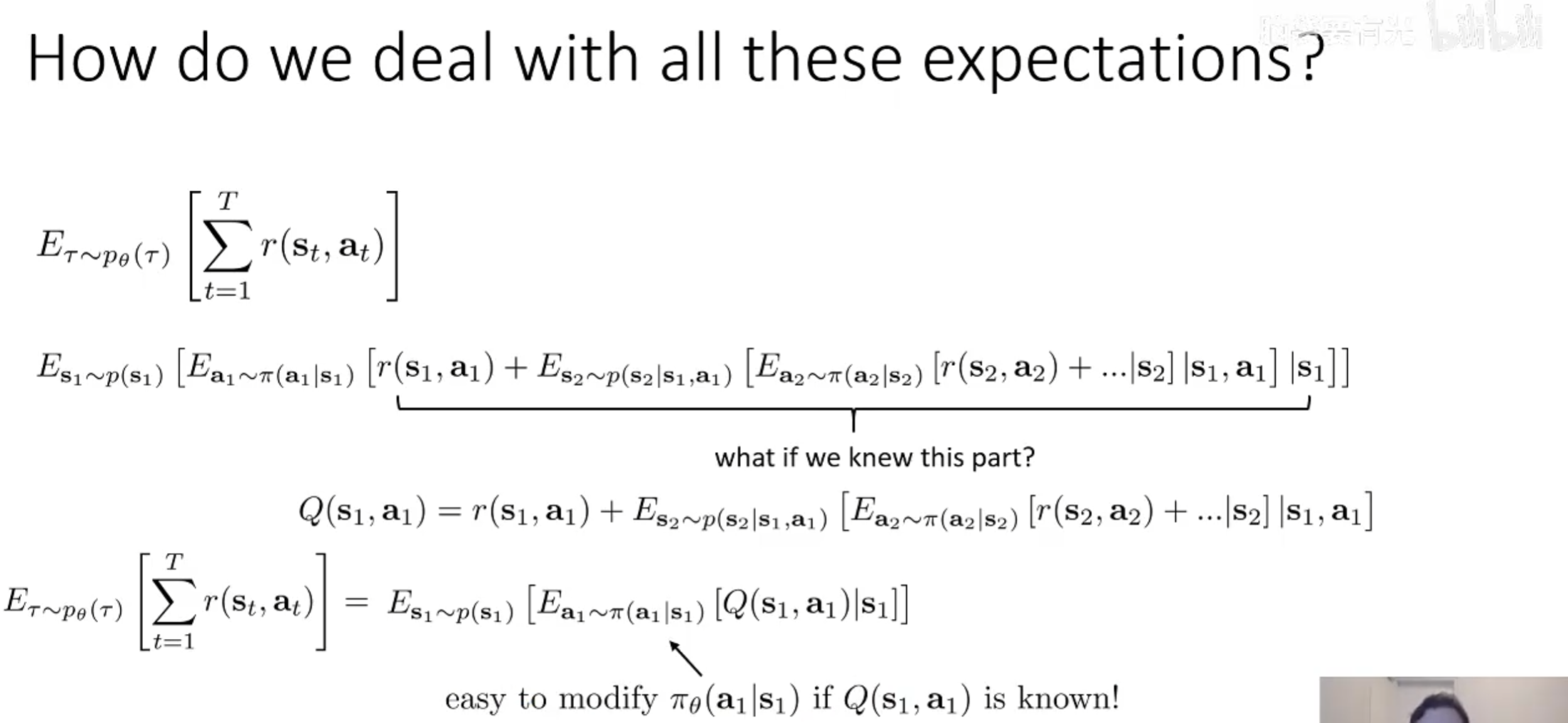
图7:状态价值函数与动作价值函数示意图。展示了状态价值函数V(s)和动作价值函数Q(s,a)的定义和关系,是理解值函数方法的基础。
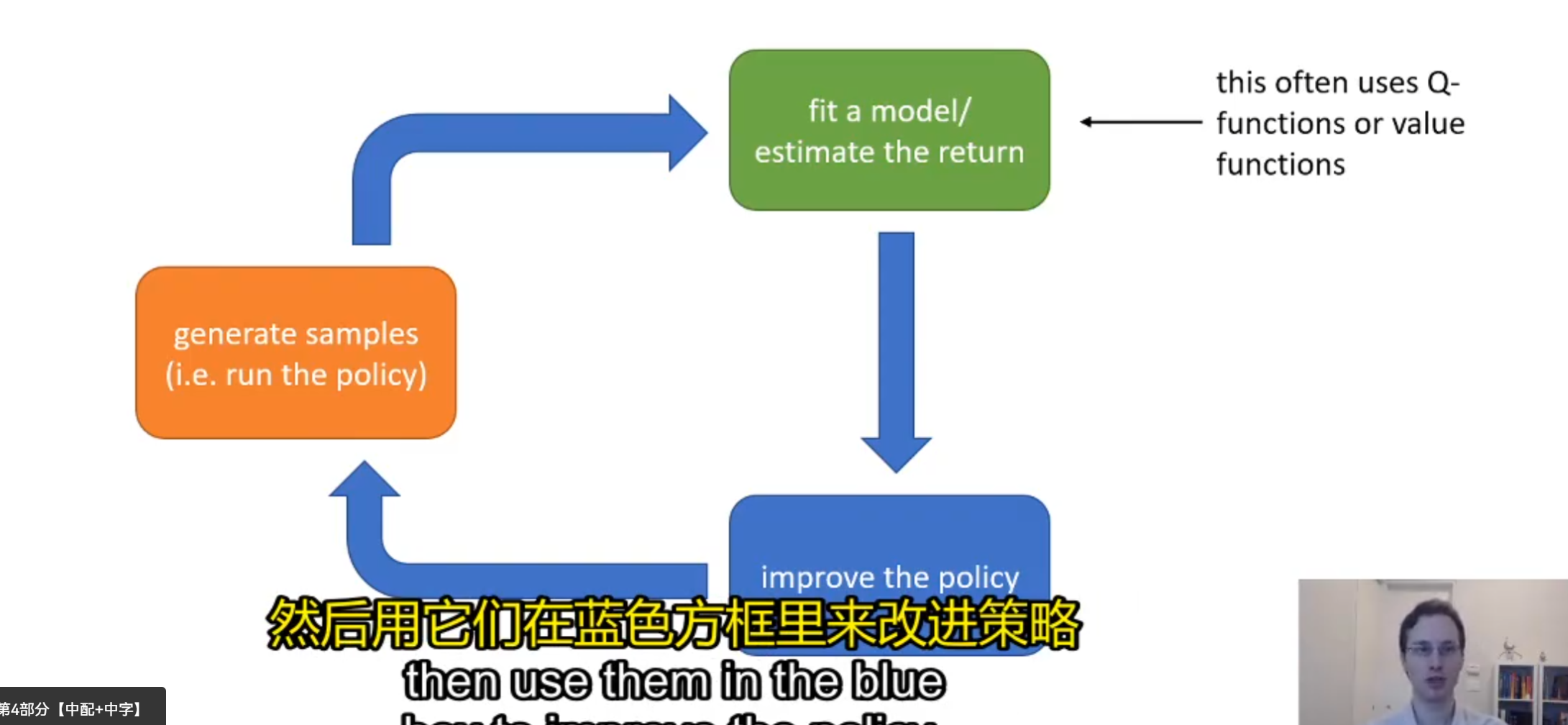
图8:贝尔曼方程与动态规划原理图。解释了贝尔曼方程如何将当前状态价值与未来状态价值联系起来,以及动态规划如何利用这一关系进行值函数迭代。
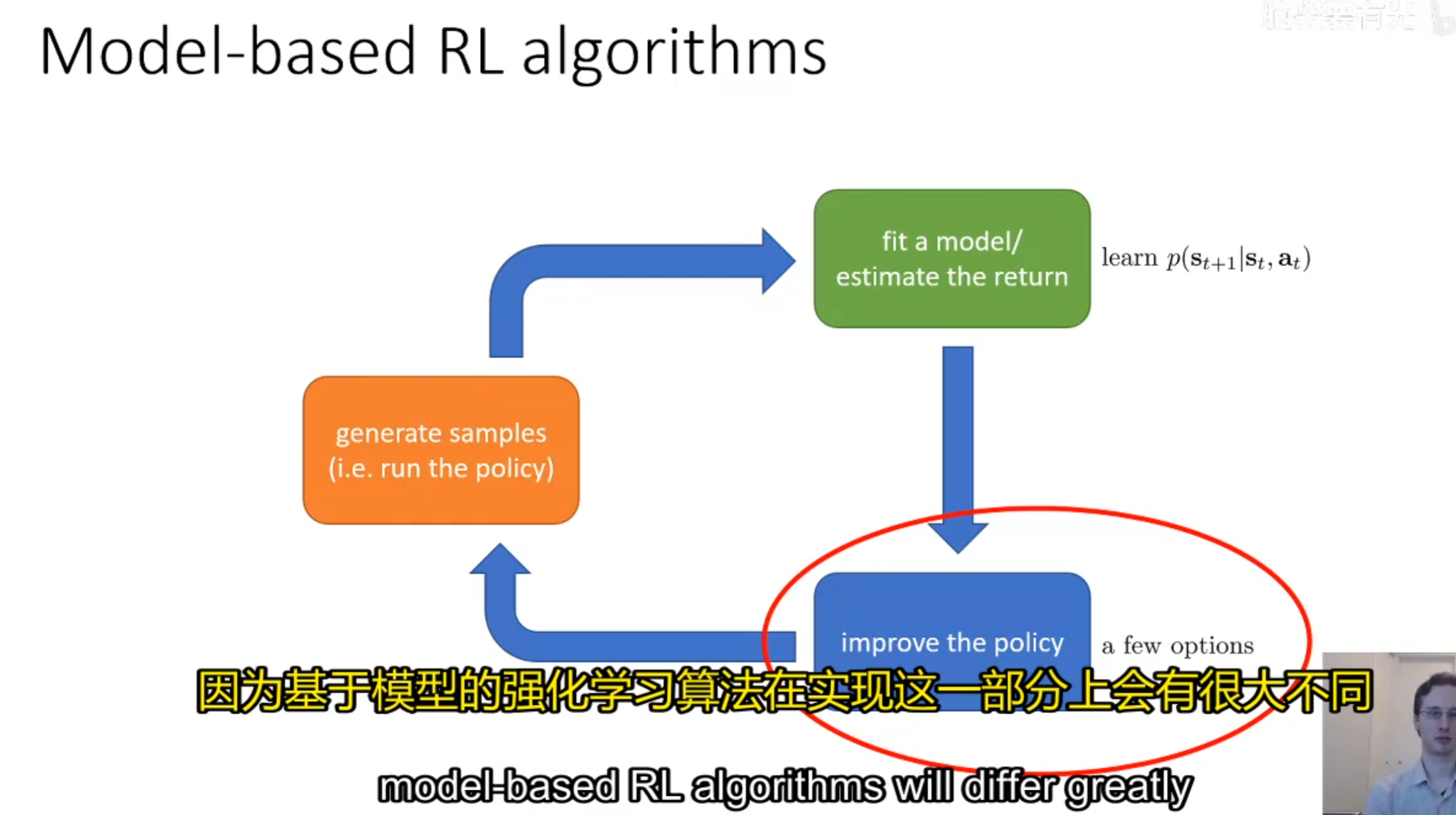
图9:Q-learning算法更新过程示意图。展示了Q-learning算法中Q值的更新规则,包括选择动作、观察奖励和下一状态,然后更新Q表的过程。
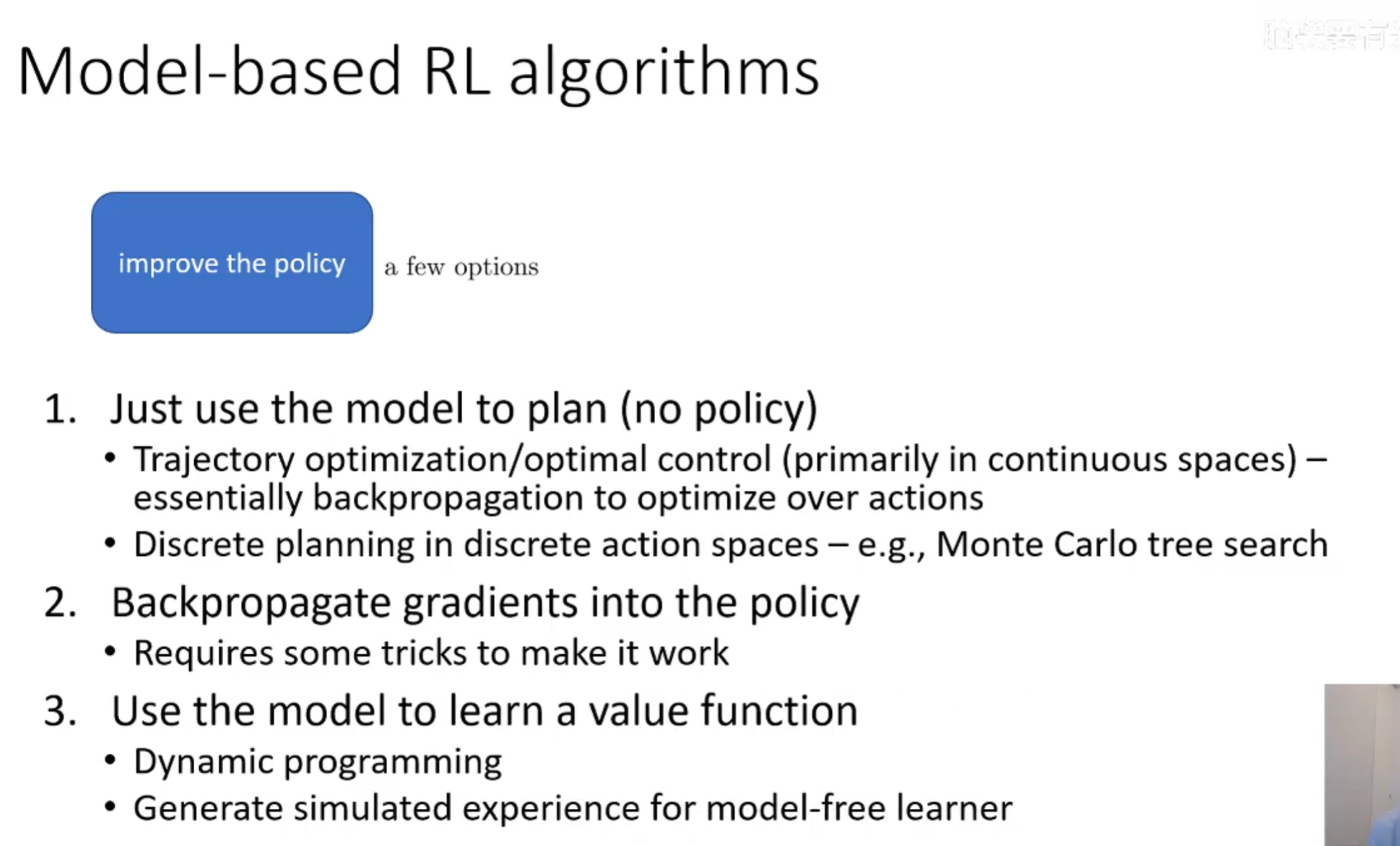
图10:深度Q网络(DQN)架构图。展示了DQN如何用深度神经网络近似Q函数,包括经验回放(Experience Replay)和目标网络(Target Network)两个关键技术。
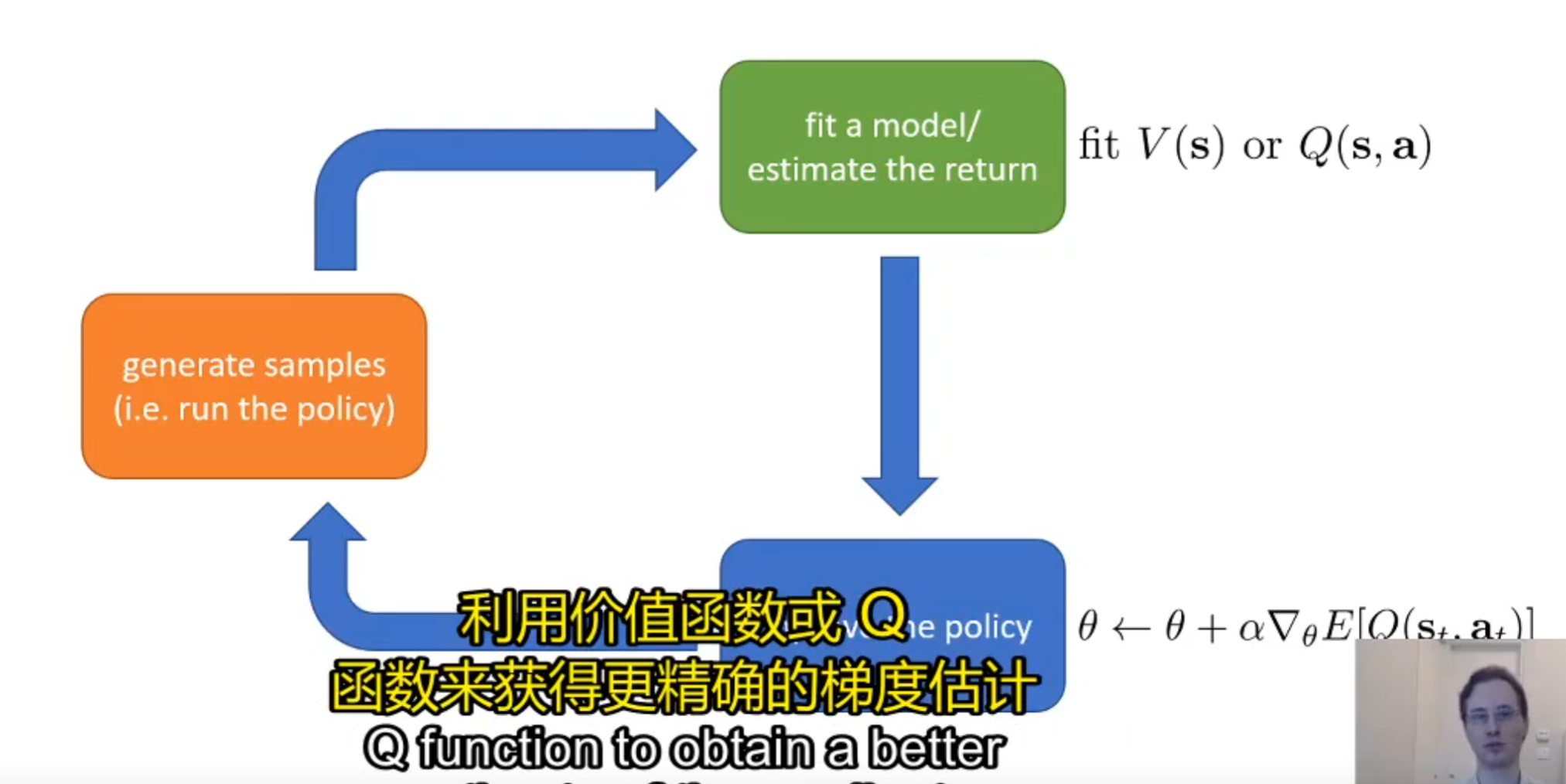
图11:价值函数近似与神经网络拟合示意图。展示了如何用神经网络参数化值函数,将高维状态空间映射到标量价值,解决传统表格方法维度灾难问题。
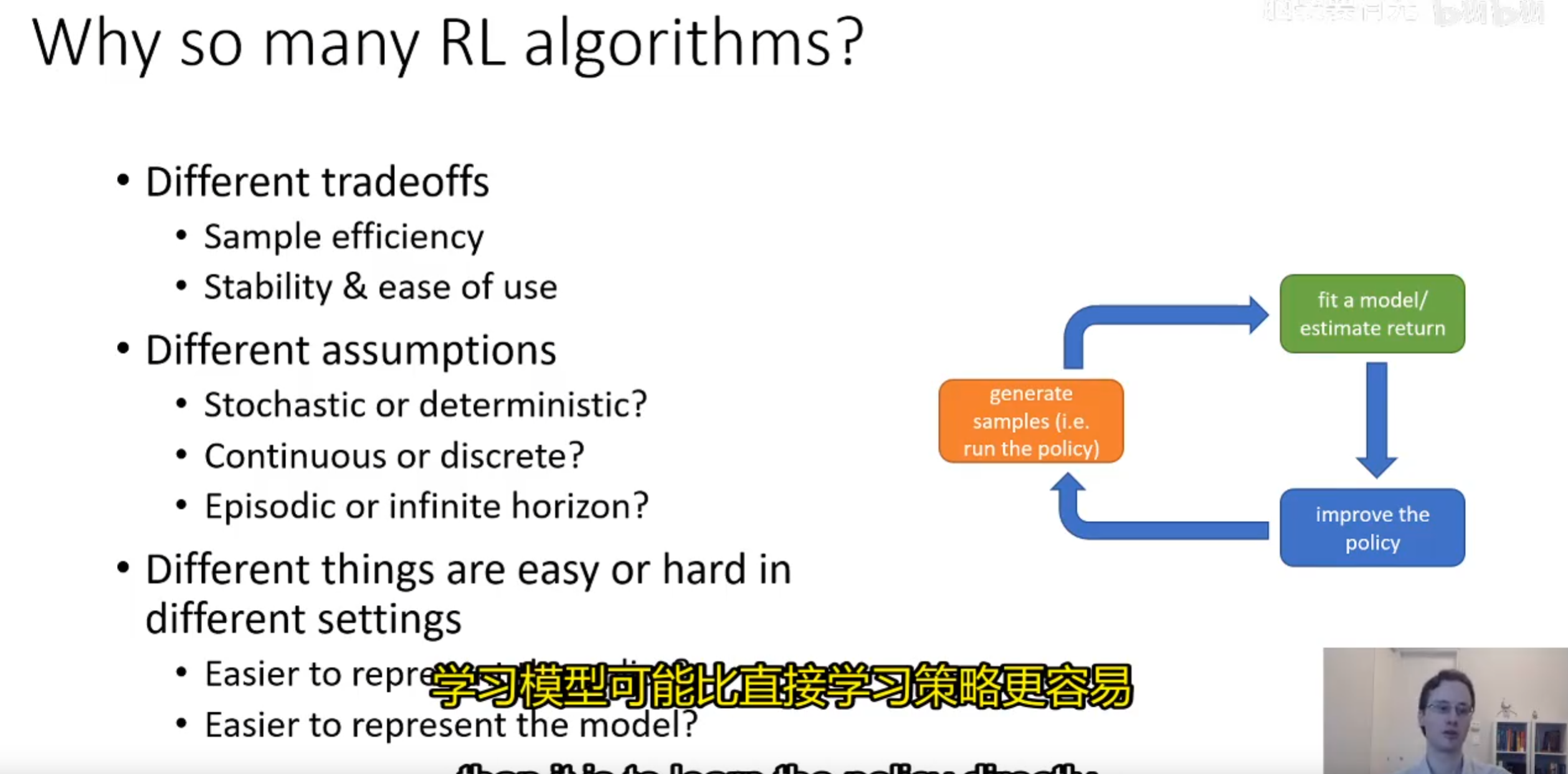
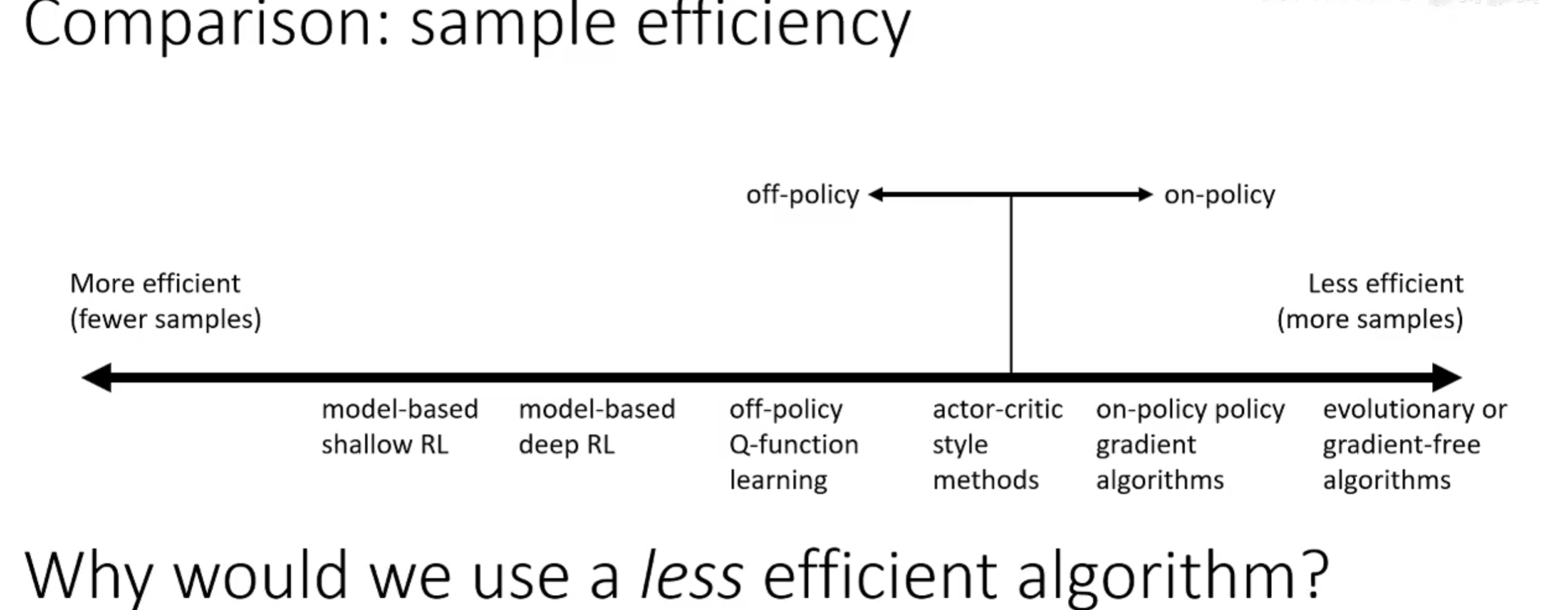
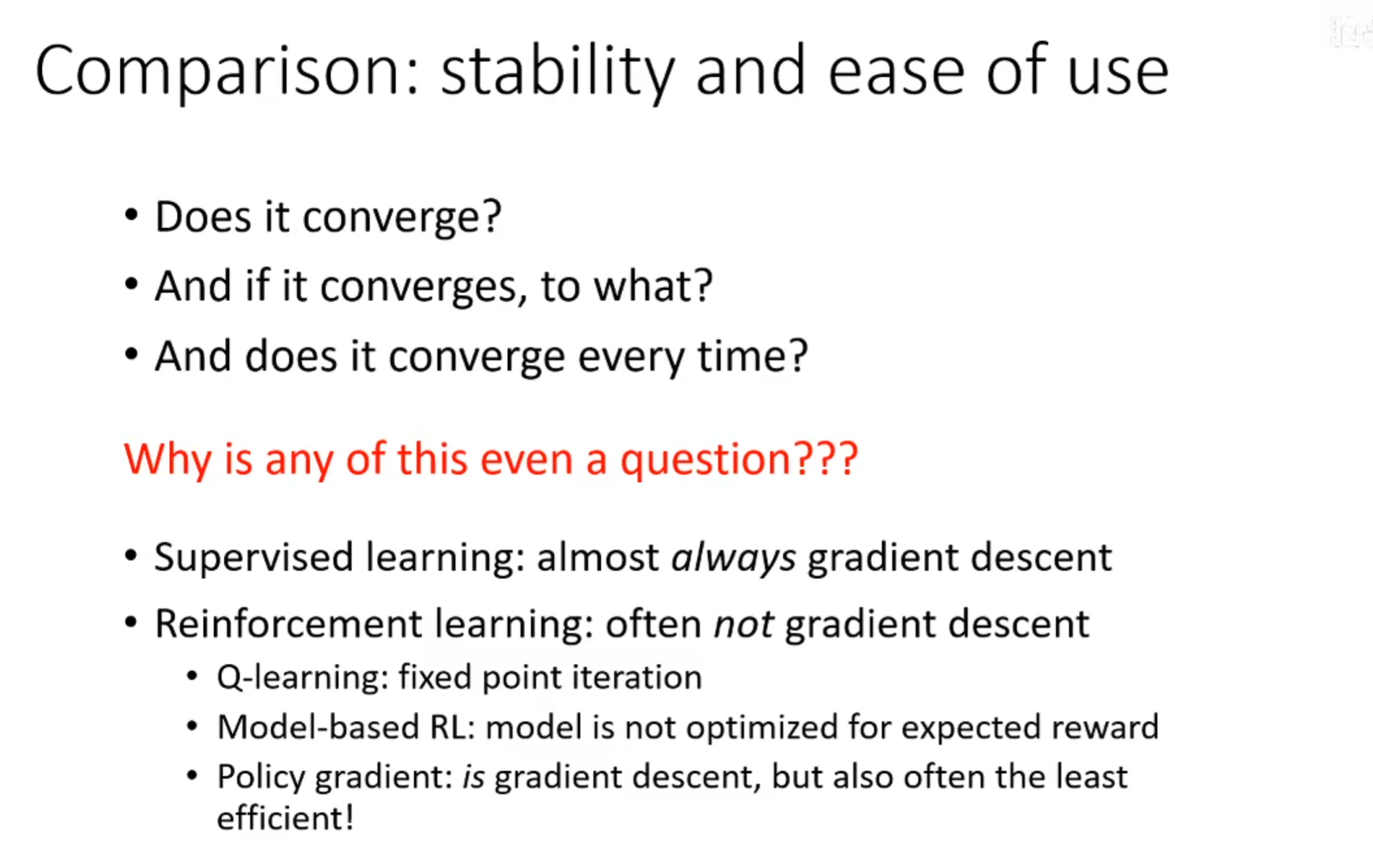
3. 权衡(Trade-off)
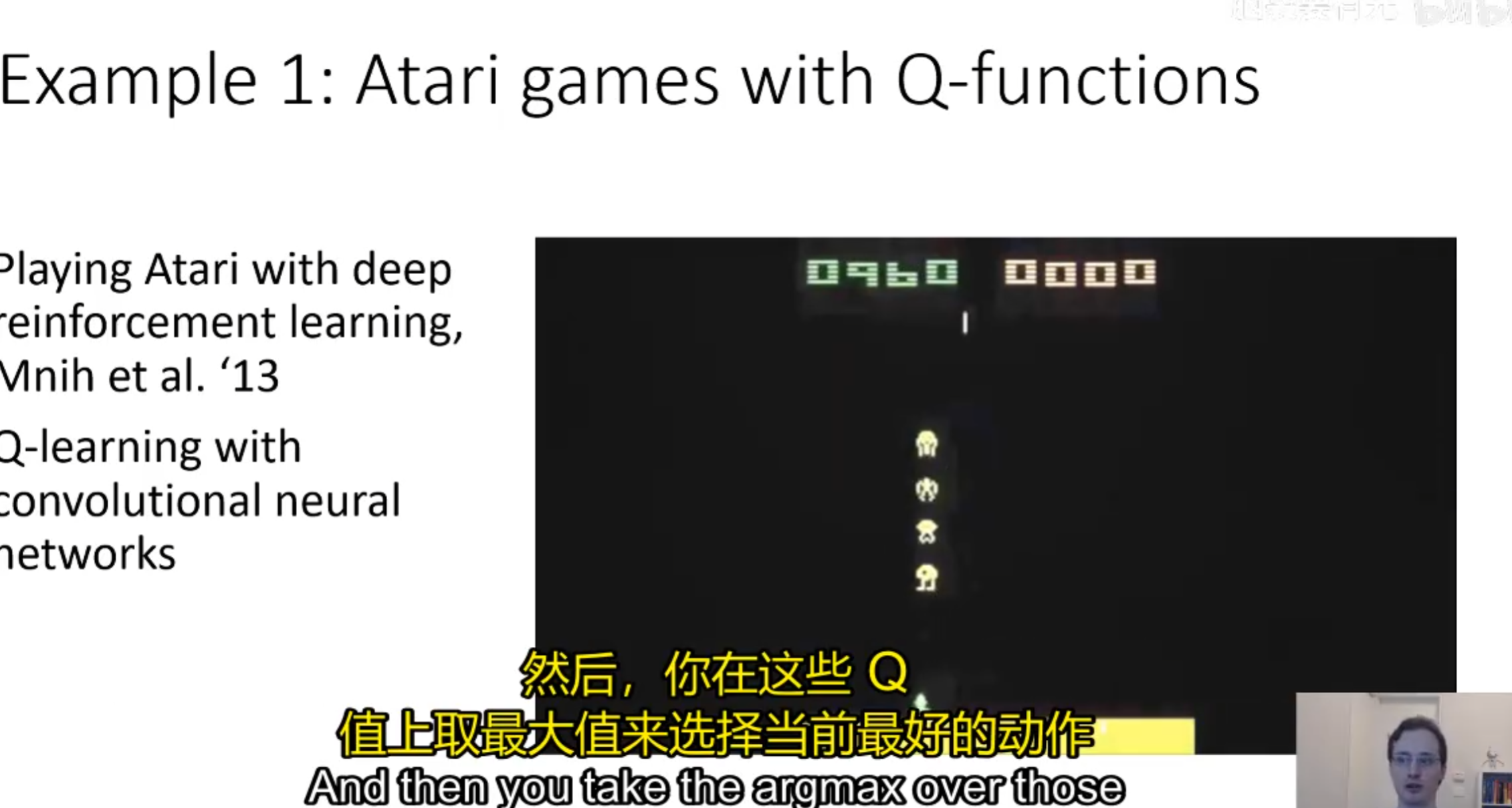
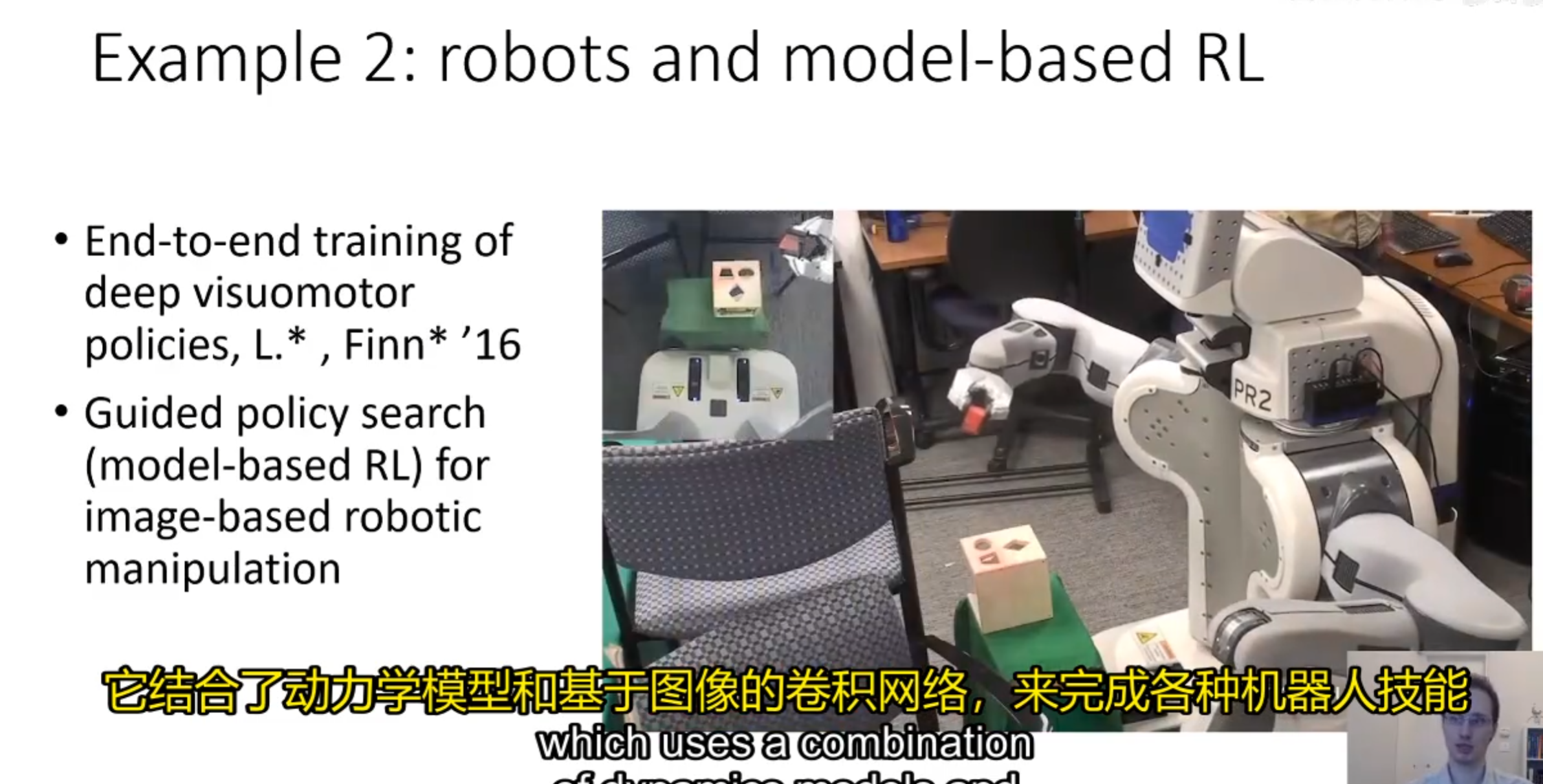
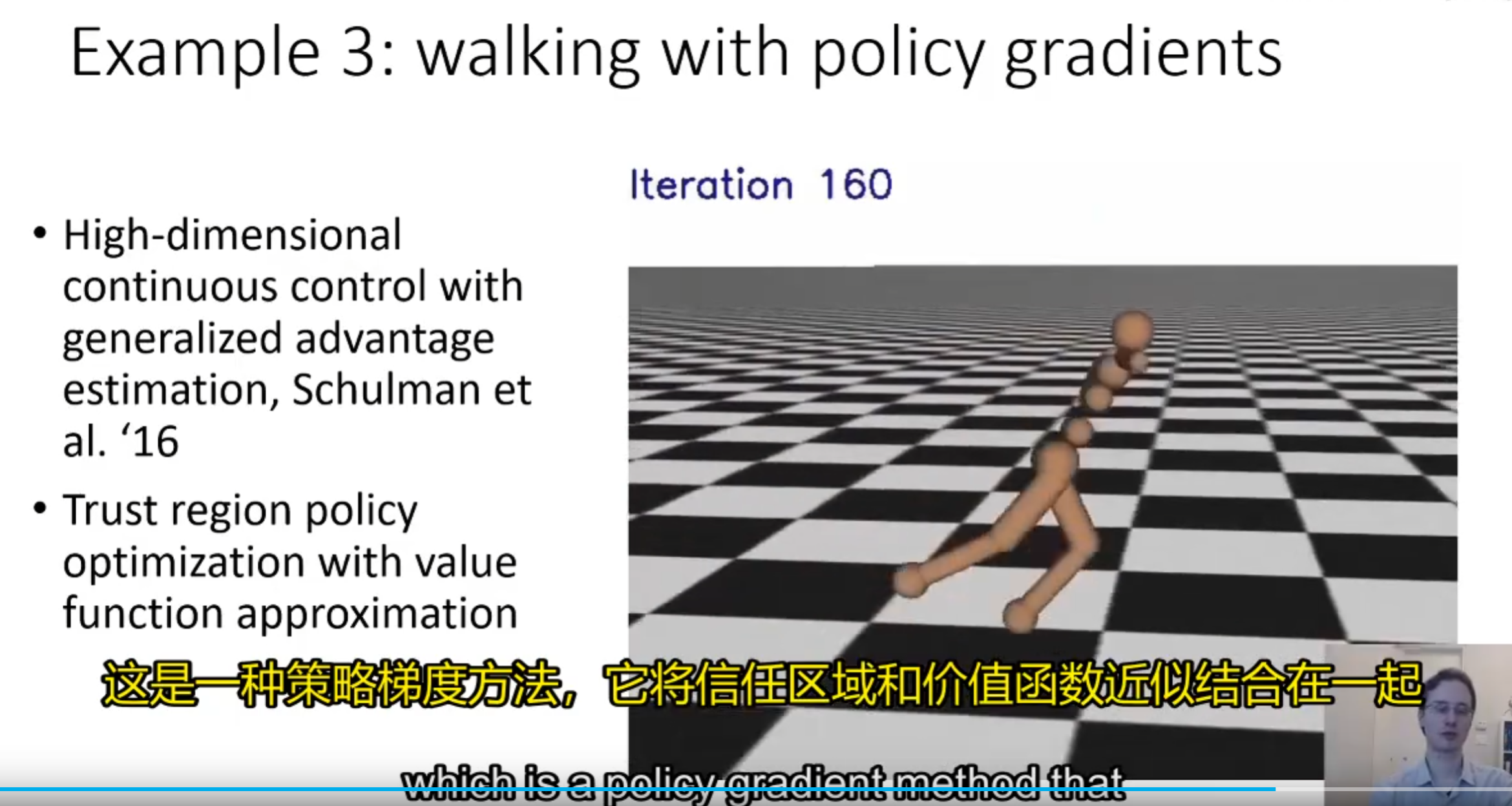
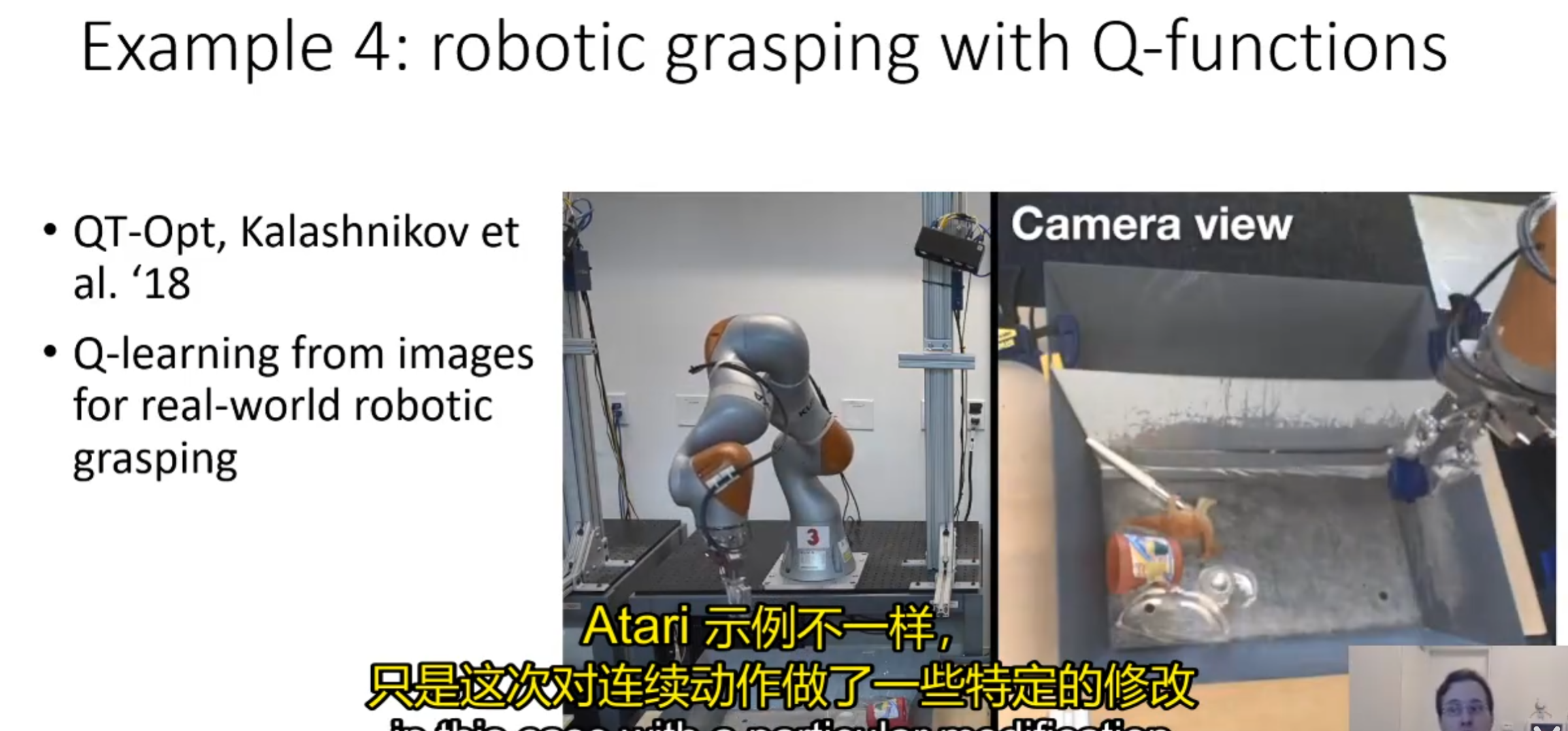
4. 案例
5. 总结与展望
5.1 核心流程与关键技术点总结
本文系统性地介绍了深度强化学习(DRL)从理论到实践的全过程。核心流程可概括为以下闭环:
-
环境交互框架:智能体通过观察环境状态、执行动作、接收奖励的循环与环境交互,目标是学习最大化长期累积奖励的最优策略。
-
算法分类体系:包括基于值函数的方法(如 Q-learning、DQN)、基于策略的方法(如 REINFORCE、PPO)以及结合两者的 Actor-Critic 方法。
-
关键技术组件:
- 环境建模:使用 Gym、MuJoCo 等工具定义状态空间、动作空间和奖励函数。
- 神经网络架构:策略网络(Actor)输出动作分布,价值网络(Critic)评估状态价值。
- 数据收集与采样:通过轨迹采样获取状态-动作-奖励序列。
- 优势估计:使用广义优势估计(GAE)衡量动作的相对优势。
- 策略优化:采用 PPO 的裁剪机制等信任域方法稳定策略更新。
- 价值函数更新:通过最小化时序差分误差优化价值网络。
-
实践实现步骤:从环境搭建、智能体设计、数据收集到策略更新的完整工程化流程,配合具体的 Python 代码示例,为读者提供了可操作的实践指南。
5.2 未来发展趋势展望
深度强化学习作为人工智能的前沿领域,未来将在以下几个方向持续突破:
-
大语言模型与强化学习的深度融合
- 指令跟随与规划:利用大语言模型(LLMs)的自然语言理解能力,将高层任务指令分解为可执行的强化学习子任务。
- 知识引导探索:将 LLMs 中编码的世界知识作为先验,引导智能体在复杂环境中的探索,减少无效尝试。
- 奖励函数设计:通过自然语言描述奖励目标,自动生成或调整奖励函数,降低人工设计成本。
-
多智能体强化学习(MARL)
- 协作与竞争:研究智能体在混合动机环境中的合作、竞争与沟通机制,应用于自动驾驶车队协调、多机器人系统等。
- 可扩展性:开发能够处理大量智能体交互的算法,解决信用分配、非平稳性等挑战。
- 社会智能:模拟人类社会的合作、谈判、联盟形成等复杂行为。
-
安全、鲁棒性与可解释性
- 安全约束:确保智能体在探索过程中不执行危险动作,在机器人控制、医疗决策等安全关键领域尤为重要。
- 对抗鲁棒性:提高智能体对环境扰动、传感器噪声和对抗性攻击的鲁棒性。
- 可解释性:开发可视化工具和解释性方法,使智能体的决策过程对人类透明,建立信任。
-
样本效率与离线强化学习
- 高效探索:结合基于模型的方法、好奇心驱动探索等,减少与环境交互所需的样本量。
- 离线强化学习:直接从静态数据集中学习策略,无需在线交互,适用于数据收集成本高或危险的环境。
-
跨领域应用拓展
- 科学发现:应用于药物设计、材料发现、蛋白质折叠等科学研究领域。
- 工业优化:优化制造流程、供应链管理、能源调度等复杂系统。
- 创意生成:辅助艺术创作、音乐作曲、游戏关卡设计等创造性任务。
5.3 结语
深度强化学习正从实验室走向现实世界,其"试错学习"的本质与人类和动物的学习方式有着深刻的相似性。随着算法不断成熟、计算资源日益丰富以及与其他 AI 技术的交叉融合,DRL 有望在解决复杂序列决策问题上发挥更大作用。然而,挑战依然存在------包括样本效率、安全性、泛化能力等。未来的研究需要算法创新、理论突破与工程实践并重,推动强化学习成为更强大、更可靠、更普惠的人工智能工具。
对于初学者而言,掌握本文所述的核心流程与关键技术点是踏入这一领域的坚实第一步。建议读者从经典环境(如 CartPole、MountainCar)和算法(如 PPO、DQN)入手,亲手实现代码,逐步深入理解其内在机理,进而探索更前沿的研究方向与应用场景。