机载雷达目标检测与杂波抑制全链路仿真:从脉压到空时自适应处理
本文以一套完整的仿真系统为例,系统阐述机载脉冲多普勒雷达信号处理的理论链路,涵盖波形设计、匹配滤波、脉冲积累、阵列波束形成、地杂波建模、空时谱分析及恒虚警检测等关键环节。
原文链接
一、引言
机载雷达在下视工作时,不可避免地会接收到来自地面的强烈散射回波,即地杂波。由于载机平台运动,杂波在不同方位上具有不同的多普勒频移,在空域和时域上形成耦合,严重制约低速目标的检测。为解决这一问题,现代机载雷达普遍采用脉冲多普勒体制,并借助数字波束形成和空时自适应处理技术实现杂波抑制。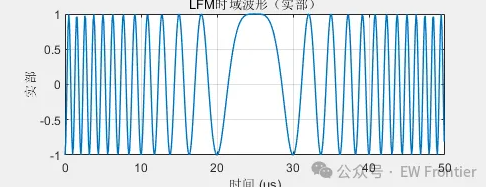
要深入理解上述技术,建立一套自顶向下的仿真验证平台至关重要。本文基于一套完整的 MATLAB 仿真链路,对正侧视机载雷达从波形产生到目标检测的全过程进行理论描述,详细给出各模块的数学模型和设计思路,并分析仿真结果所反映的物理规律。
二、系统模型与参数设计
仿真设定一部 S 波段机载雷达,工作频率 f c = 1 f_c=1 fc=1 GHz,采用 20 阵元均匀线阵,阵元间距 d = λ / 2 d=\lambda/2 d=λ/2,阵列法线方向瞄准正侧视。平台高度 H = 5 H=5 H=5 km,速度 v p = 150 v_p=150 vp=150 m/s。探测目标位于 60 km 处,径向速度 60 m/s。
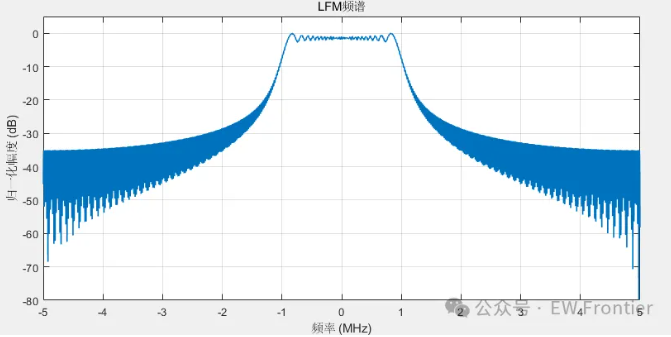
波形采用线性调频脉冲,带宽 B = 2 B=2 B=2 MHz,脉宽 T p = 50 T_p=50 Tp=50 μs,调频斜率 K r = B / T p K_r=B/T_p Kr=B/Tp。脉冲重复频率 P R F = 2 PRF=2 PRF=2 kHz,相参处理间隔(CPI)包含 64 或 256 个脉冲。接收端以 f s = 10 f_s=10 fs=10 MHz 进行正交采样。
雷达方程中的关键参数包括:阵元发射功率 1 kW,天线收发增益均取阵元数平方(理想同相合成),系统损耗 1.5,噪声系数 3,后向散射系数 σ 0 = 0.01 \sigma_0=0.01 σ0=0.01,目标 RCS σ t = 1 \sigma_t=1 σt=1 m²。这些参数为杂波和目标功率的定量计算提供了依据。
三、线性调频波形与匹配滤波
发射信号采用复基带线性调频脉冲:
该信号的模糊函数由自相关和多普勒频移下的互相关共同定义:
理论分析和仿真结果均表明,LFM 信号的模糊图呈斜刀刃状,具有良好的距离分辨率和多普勒容忍性,但存在距离‑多普勒耦合现象:多普勒失配会造成测距偏差,这在大动态多普勒场景中需要通过补偿加以修正。
接收端采用匹配滤波器 h ( t ) = s ∗ ( − t ) h(t)=s^*(-t) h(t)=s∗(−t) 实现脉冲压缩。匹配滤波输出为发射信号的自相关函数,主瓣宽度约为 1 / B 1/B 1/B,峰值旁瓣比约为 -13.2 dB(矩形包络)。在无噪声环境中,60 km 处的目标回波经脉压后呈现尖锐峰值,距离分辨能力完全由带宽决定。
四、脉冲多普勒处理与动目标检测
在相参脉冲串体制中,目标回波在慢时间维被多普勒频率 f d = 2 v / λ f_d=2v/\lambda fd=2v/λ 调制,第 m m m 个脉冲的采样信号可以写为:
其中 T r = 1 / P R F T_r=1/PRF Tr=1/PRF 为脉冲重复周期。在接收端依次完成脉冲压缩后,得到一个慢时间‑快时间的二维数据矩阵。对其慢时间维进行离散傅里叶变换,即实现动目标检测(MTD)。MTD 等效于一组多普勒滤波器组,每个滤波器对应一个径向速度通道。
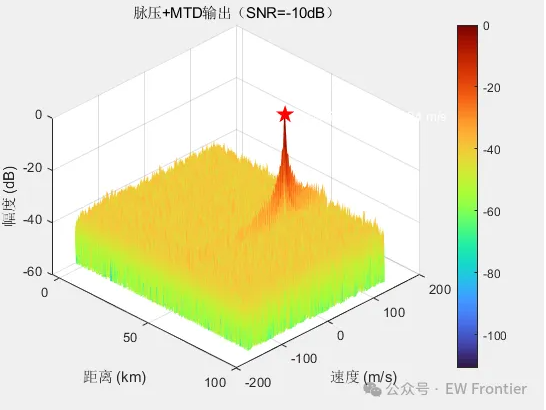
仿真中向回波加入信噪比为 -10 dB 的复高斯白噪声,此时原始信噪比很低,单脉冲难以发现目标。但经过 64 点慢时间 FFT 积累后,信号能量被相干叠加,噪声功率非相干累加,获得约 18 dB 的相参积累增益,目标在距离‑多普勒图上清晰可见,且估计距离和速度与真值一致。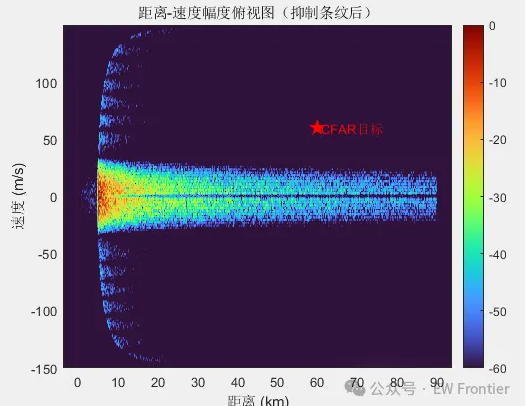
五、阵列天线与数字波束形成
为获得空间分辨能力并提高天线增益,使用 20 阵元均匀线阵,并采用 -30 dB 副瓣的 Hamming 窗进行幅度加权。阵列的复方向图为:
当波束指向角为 θ 0 \theta_0 θ0 时,DBF 权矢量取为 w n B F = w n , e − j 2 π λ n d sin θ 0 w_n^{BF}=w_n,e^{-j\frac{2\pi}{\lambda}n d\sin\theta_0} wnBF=wn,e−jλ2πndsinθ0。此时各路阵元接收的信号被同相相加,在 θ 0 \theta_0 θ0 方向形成增益极大,而对其他方向形成抑制。
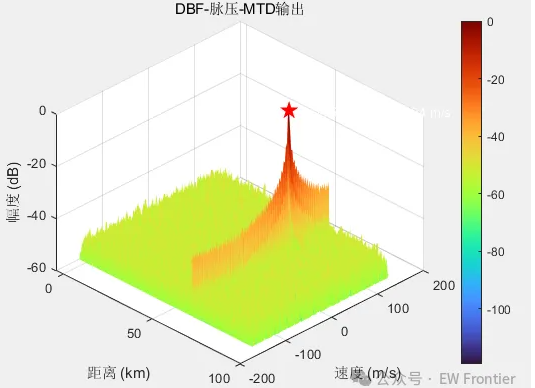
仿真中将一个 30° 方向的目标回波馈入阵列,经 DBF 后依次进行脉压和 MTD,结果表明,DBF 不仅准确提取了目标角度,而且通过阵列增益和窗函数副瓣抑制,有效降低了来自其他角度的潜在干扰,为目标检测提供了空域纯净度。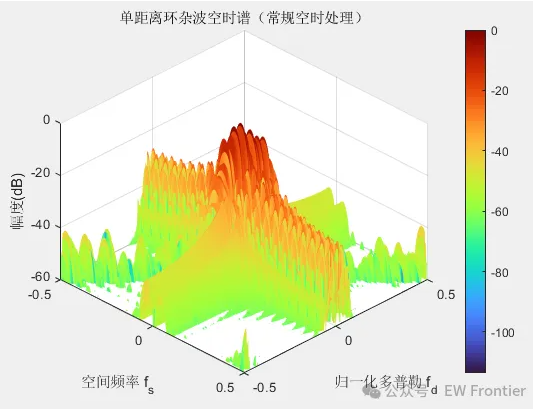
六、机载地杂波建模
机载雷达下视工作时,地杂波是主要的背景干扰。杂波建模的基本思想是:将雷达视线范围内的地面划分为一系列距离环,每个距离环内再按方位角切割成多个相互独立的杂波块。每个杂波块的雷达截面积由雷达方程给出:
其中 Δ A k ≈ R ⋅ Δ R ⋅ Δ θ \Delta A_k\approx R\cdot\Delta R\cdot\Delta\theta ΔAk≈R⋅ΔR⋅Δθ 为该块的地面照射面积, Δ R = c / ( 2 B ) \Delta R=c/(2B) ΔR=c/(2B) 为距离分辨率, Δ θ \Delta\theta Δθ 为方位角间隔。
对于位于距离 R R R、俯仰角 ϕ = arcsin ( H / R ) \phi=\arcsin(H/R) ϕ=arcsin(H/R)、方位角 θ \theta θ 的杂波块,其归一化空间频率和多普勒频率分别为:
在正侧视阵列中,空间频率与归一化多普勒频率近似呈线性关系,因此杂波在角度‑多普勒平面上沿一条斜线分布,称为杂波脊。
每个杂波块的回波幅度还受到收发方向图调制,并叠加独立的复高斯随机变量以模拟大量散射体干涉导致的起伏。将所有杂波块的空时二维导向矢量按幅度加权求和,即得到该距离环的空时快拍:
其中 a t \mathbf{a}_t at 和 a s \mathbf{a}_s as 分别为时域和空域导向矢量, ⊗ \otimes ⊗ 表示 Kronecker 积。该模型精确刻画了杂波的空时耦合结构,是 STAP 处理的基础。
七、空时二维谱与杂波特性
对单个距离环的杂波空时快拍做二维傅里叶变换,即可获得其角度‑多普勒谱。仿真结果显示,杂波能量高度聚集在一条倾斜的 "脊" 上,脊的位置与理论预测完全吻合。主瓣杂波对应于阵列主波束照射的地面区域,通常零多普勒附近能量最强;副瓣杂波则分布在脊的其他部分。
这一空时谱直观揭示:传统的一维杂波抑制方法(仅时域 MTI 或仅空域波束置零)难以完全滤除杂波,必须采用二维联合处理。这正是空时自适应处理(STAP)的出发点 ------ 通过自适应计算二维滤波器权值,在角度‑多普勒平面上沿杂波脊形成凹口。
八、全链路仿真与 CFAR 检测
将目标回波、多距离环杂波和接收机热噪声合成为一个完整的数据立方体(阵元 × 脉冲 × 距离门)。为提升计算效率,直接构造波束形成后的通道数据,避免对全维度大数组的循环操作。
距离向脉压后,先进行慢时间维的简单 MTI 处理(减去脉冲维均值),以初步抑制零多普勒附近的强主瓣杂波;然后通过加权 FFT 实现脉冲多普勒处理,得到最终的距离‑多普勒图。
在该图上可以清晰观察到杂波脊和叠加于其上的目标点。为完成自动检测,采用二维单元平均恒虚警(CA‑CFAR)算法。通过在距离和多普勒维分别设置保护窗和训练窗,利用训练单元平均功率作为背景杂波与噪声功率的估计,并与门限系数相乘得到自适应门限。凡是幅度超过门限的单元即判为检测。仿真在目标附近成功检测到目标,并估计出距离 60.00 km、速度 60.00 m/s,与设定值高度一致。
九、输出 SCNR 随目标多普勒的变化
保持杂波和噪声背景不变,将目标的归一化多普勒频率从 -0.5 扫至 0.5,计算每个多普勒通道的输出信杂噪比(SCNR)。SCNR 定义为该通道信号功率与相邻若干通道干扰功率均值的比值。
SCNR 曲线呈现出典型的 "凹口" 特性:在主瓣杂波区(零多普勒附近)SCNR 急剧下降,甚至出现深零陷,反映雷达的最小可检测速度(MDV)受限;而在杂波脊之外的高多普勒区域,SCNR 显著升高,目标容易被检测。该曲线为雷达系统设计中的 PRF 选取、波束指向优化和 STAP 性能评估提供了定量参考。
十、结语
本文以理论推导结合仿真验证的方式,完整呈现了机载脉冲多普勒雷达从波形设计到目标检测的全链路信号处理过程。从 LFM 的模糊函数和匹配滤波特性,到脉冲多普勒的相参积累,再到阵列波束形成和空时杂波建模,最终通过 CFAR 自动提取目标并分析输出 SCNR 特性,形成了一条逻辑紧密、物理清晰的仿真研究链条。
这一仿真平台不仅有助于理解各模块的内在原理,还可作为更复杂算法(如 STAP 及其降维变体、空时频三维处理等)的开发和验证基础。希望通过本文的系统梳理,能够为雷达信号处理领域的学习者和工程师提供有价值的参考。