ContextCapture实景建模大师是一套无需人工干预,通过影像自动生成高分辨率的三维模型的软件解决方案。它集合了全球最先进数字影像处理、计算机虚拟现实以及计算机几何图形算法,在易用性、数据兼容性、运算性能、友好的人机交互及自由的硬件配置兼容性等方面代表了目前全球相关技术的最高水准。
使用ContextCapture Center,可以快速创建精细的三维真实感模型,而不需要昂贵的特殊设备。在项目的整个生命周期中,这些模型还可以用于为设计、施工和运营决策提供准确的现实环境背景。
软件功能:
1.使用来自不同摄像头和传感器的图像:使用各种摄像头,从智能手机到专业化的高空或地面多向采集系统;
2.通过航影像,重建高精度实景三维模型,在智慧城市、数字孪生等领域扮演重要角色;
3.创建真正射影像图:支持精确的制图和工程,组合几乎所有形式的图像和投影,满足传统测绘工作需要;
4.生成二维和三维GIS模型使用一系列完整的地理数据类型(例如正射图像、点云、栅格数字高程模型和Esri I3S格式)生成精确的地理参考三维模型,与GIS系统解决方案的数据互操作性强;
5.丰富的数据输出成果,支持Bentley(3MX、3SM等)、OSGB、OBJ、LOD tree export、SuperMap(S3M)等数据格式;在BIM设计、项目规划、考古、建构筑物监测等方面广泛应用;
6.采用最新的计算系统,具有可扩展的计算能力,可以使用桌面计算机和集群处理设备,实现GPU计算、多核计算、高级波束平差、拼接机制、任务队列和监控、网格计算
第一部分、倾斜摄影测量原理及应用领域
1. 倾斜摄影测量原理及应用领域:
1.1 摄影测量原理、原理
1.2 倾斜摄影测量的特点
1.3 技术优势
1.4 倾斜摄影测量生产技术流程
1.5 市场上数据处理软件分析
1.6 应用领域


第二部分、 倾斜摄影测量数据采集方法
2.倾斜摄影测量数据采集方法:
2.1 航飞任务与技术规程规范解读
2.2测区划分
2.3 航向重叠率、旁向重叠率
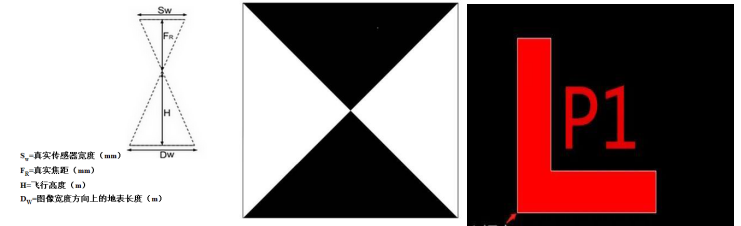
2.4 航高和分辨率设计、计算
2.5 像控点布设要求、方法及采集
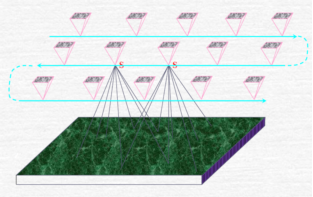
2.6 影像数据采集

第三部分、 C C 支持数据类型及导入数据方法
3. C C 支持的数据类型:
3.1 图片:
3.2 视频
3.3 激光点云
3.4 人工补充拍摄

第四部分、 C C 空三计算参数设置及数据处理方法
4. 空三计算
4.1 项目创建
4.2 区块划分、合并
4.3 数据导入:单选、批量
4.4 相机参数设定
4.5 手工添加校验相机参数及入库
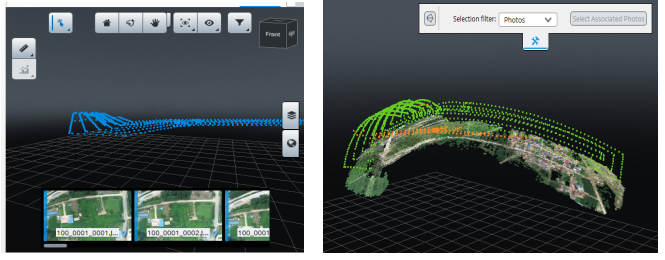
4.6 POS数据输入、坐标系设定
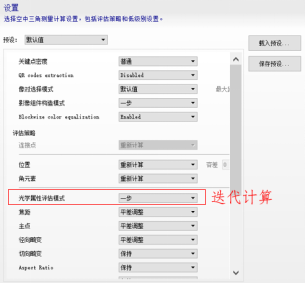
4.7 空三参数设定
4.8 空三计算
4.9 空三成果合并
4.10 空三报告解读
4.11 空三失败问题处理

第五部分、 C C 控制点与连接点添加及应用
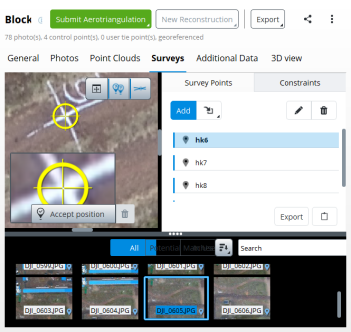
5 . 控制点与连接点添加及应用
5.1 像控点文件编辑方法
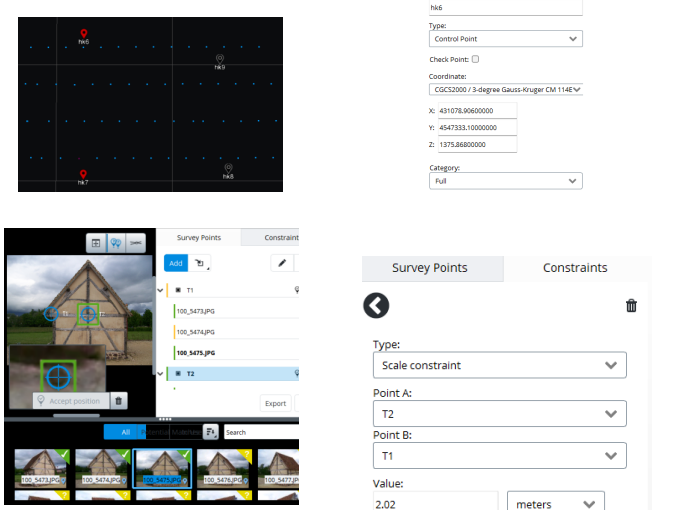
5.2 添加像控点
5.3 刺点
5.4 空三计算方法
5.5 多人联合刺点方法
5.6 自定义坐标系方法
5.7 手工添加连接点方法
5.8 比例约束
5.9 原点约束
5.10 坐标轴约束
第六部分、 三维重建
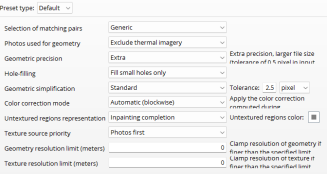
6 . 三维重建及应用
6.1 三维重建参数设置
6.2三维模型生产(3MX、OSGB、OBJ等格式)
6.3 三维立体模型量测
6.4 三维动画制作
6.5 DOM/DSM生产
6.6 点云数据生产
6.7 点云数据分类,提取地面高程点
6.8 生产DEM,绘制等高线
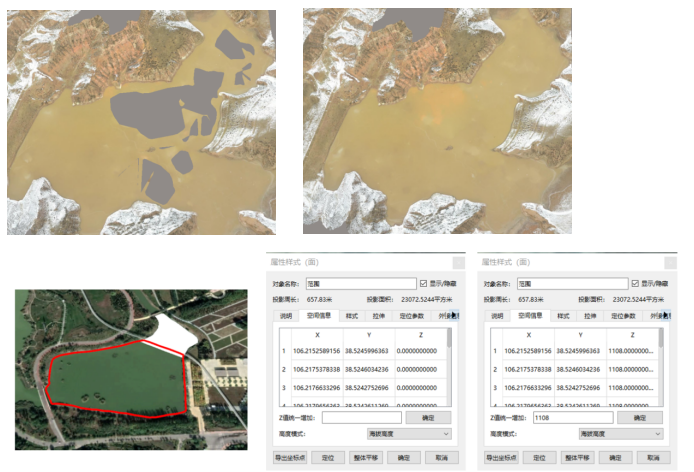
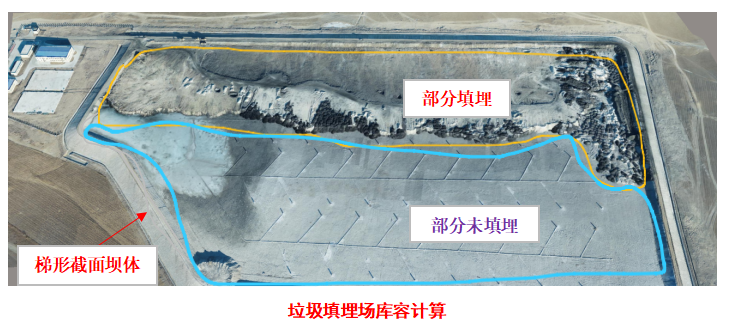
6.9 复杂项目土方计算(计算已部分填埋的垃圾场库容问题,坝体是梯形截面)
6.10 日照分析(城市规划、居民住宅采光)

第七部分、三维模型修复与场景拼接
7 . 三维模型修复与场景拼接
7.1 模型出现问题原因、分类
7.2 模型修复软件选择
7.2 参数法修复
7.3 几何约束法修复
7.4 Touchup Tools修复
7.5 Meshmixer 修复
7.6 CC_S3Ccomposer场景拼接