一、概述
一个主芯片FPGA,把来自两个外设camera+IMU的数据,通过hololink逻辑模块整合下打包通过光口传出;NVIDIA Hololink IP 的顶层 SystemVerilog 模块,属于传感器→主机之间的高速图像 / 数据传输处理核心,是一个高度参数化、可配置、多时钟域、带协议处理的完整 FPGA 以太网 + 传感器桥接 SoC。主要应用在工业/医疗/车载图像传感器数据上云;
二、HOLOLINK 逻辑视图
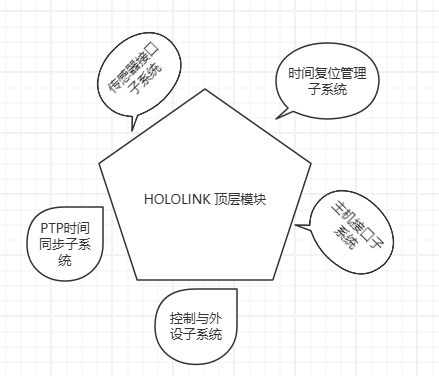
HOLOLINK 顶层模块把五大系统子模块的信息进行整合,并输出;其核心功能模块可划分为,时钟复位管理子系统、主机接口(HIF)子系统、传感器接口(SIF)子系统、PTP 时间同步子系统、控制与外设子系统,它们都是通过统一 AXI-Stream互连,以及APB配置;
1、时钟复位管理子系统
该子系统包含多时钟域(HIF、APB、PTP、SIF_RX、SIF_TX)异步复位生成reset_gen IP核;
reset_gen #(
.NUM_SENSOR_RX ( NUM_SENSOR_RX ),
.NUM_SENSOR_TX ( NUM_SENSOR_TX )
) u_rst_gen(
.i_sys_rst ( i_sys_rst ),
.i_cfg_rst ( o_sw_sys_rst ),
.i_sif_rx_clk ( sif_rx_clk ),
.i_sif_tx_clk ( sif_tx_clk ),
.i_hif_clk ( i_hif_clk ),
.i_apb_clk ( i_apb_clk ),
.i_ptp_clk ( i_ptp_clk ),
.o_sif_rx_rst ( sif_rx_rst ),
.o_sif_tx_rst ( sif_tx_rst ),
.o_hif_rst ( o_hif_rst ),
.o_apb_rst ( o_apb_rst ),
.o_ptp_rst ( o_ptp_rst )
);也包含跨时钟域同步的data_sync、streaming_cdc IP 核,PTP 时间 → 同步到 主机时钟域 (HIF),以及PTP 时间 → 同步到 APB 配置时钟域;可消除亚稳态、毛刺、不定态、偶尔翻车;
data_sync u_eeprom_ip_addr_vld_sync (
.clk ( i_hif_clk ), // 目标时钟:HIF(主机)时钟域
.rst_n ( !o_hif_rst ), // 目标时钟域复位
.sync_in ( eeprom_ip_addr_vld ), // 源:APB时钟域来的有效标志(1bit)
.sync_out ( eeprom_ip_addr_vld_hif_clk ) // 输出:同步到 HIF 时钟域
);
streaming_cdc #(
.DATA_WIDTH ( 80 ),
.SRC_FREQ ( `PTP_CLK_FREQ ),
.DST_FREQ ( `HIF_CLK_FREQ )
) u_ptp_hif_cdc (
.i_src_clk ( i_ptp_clk ),
.i_dst_clk ( i_hif_clk ),
.i_src_rst ( o_ptp_rst ),
.i_dst_rst ( o_hif_rst ),
.i_src_data ( {ptp_sec, ptp_nano_sec} ),
.o_dst_data ( {ptp_sec_sync_hif, ptp_nano_sec_sync_hif} ),
.o_dst_valid ( ptp_sync_hif_valid )
);
streaming_cdc #(
.DATA_WIDTH ( 80 ),
.SRC_FREQ ( `PTP_CLK_FREQ ),
.DST_FREQ ( `APB_CLK_FREQ )
) u_ptp_apb_cdc (
.i_src_clk ( i_ptp_clk ),
.i_dst_clk ( i_apb_clk ),
.i_src_rst ( o_ptp_rst ),
.i_dst_rst ( o_apb_rst ),
.i_src_data ( {ptp_sec, ptp_nano_sec} ),
.o_dst_data ( {ptp_sec_sync_apb, ptp_nano_sec_sync_apb} ),
.o_dst_valid ( ptp_sync_apb_valid )
);2、主机接口(HIF)子系统
该子系统包含以太网帧解析、协议解封装(ETH/IP/UDP/PTP)rx_parser IP核;
generate
for (i=0; i<`HOST_IF_INST; i++) begin: gen_rx_parser
assign o_hif_axis_tready [i] = init_done_hif_clk;
rx_parser #(
.AXI_DWIDTH ( `HOST_WIDTH ),
.AXI_LS_DWIDTH ( 8 ),
.MTU ( `HOST_MTU ),
.NUM_LS_INST ( NUM_LS_RX_INST ),
.SYNC_CLK ( SYNC_CLK_HIF_APB )
) rx_parser (
.host_clk ( i_hif_clk ),
.host_rst ( o_hif_rst ),
.apb_clk ( i_apb_clk ),
.apb_rst ( o_apb_rst ),
//Configuration
.i_dev_mac_addr ( dev_mac_addr [i] ),
.i_dev_ip_addr ( dev_ip_addr [i] ),
//Register APB Interfaces
.i_apb_m2s ( s_apb_m2s_host [(i*num_host_mod)+inst_dec] ),
.o_apb_s2m ( s_apb_s2m_host [(i*num_host_mod)+inst_dec] ),
.o_dest_info ( dest_info [i] ),
.o_ptp_sync_msg ( is_ptp_sync_msg [i] ),
//AXI RX Interface inbound from packet buffer (via Ethernet MAC)
.i_axis_rx_tvalid ( i_hif_axis_tvalid [i] && init_done_hif_clk ),
.i_axis_rx_tdata ( i_hif_axis_tdata [i] ),
.i_axis_rx_tlast ( i_hif_axis_tlast [i] ),
.i_axis_rx_tuser ( i_hif_axis_tuser [i] ),
.i_axis_rx_tkeep ( i_hif_axis_tkeep [i] ),
// Sensor TX Interface
.o_stx_axis_tvalid ( stx_axis_tvalid [i] ),
.o_stx_axis_tdata ( stx_axis_tdata [i] ),
.o_stx_axis_tlast ( stx_axis_tlast [i] ),
.o_stx_axis_tuser ( stx_axis_tuser [i] ),
.o_stx_axis_tkeep ( stx_axis_tkeep [i] ),
// PTP Interface
.o_ptp_axis_tvalid ( ptp_rx_axis_tvalid [i] ),
.o_ptp_axis_tdata ( ptp_rx_axis_tdata [i] ),
.o_ptp_axis_tlast ( ptp_rx_axis_tlast [i] ),
.o_ptp_axis_tuser ( ptp_rx_axis_tuser [i] ),
.o_ptp_axis_tkeep ( ptp_rx_axis_tkeep [i] ),
//Bridge TX AXIS Interface
.o_btx_axis_tvalid ( brx_axis_tvalid [i] ),
.o_btx_axis_tdata ( brx_axis_tdata [i] ),
.o_btx_axis_tlast ( brx_axis_tlast [i] ),
.o_btx_axis_tuser ( brx_axis_tuser [i] ),
.o_btx_axis_tkeep ( brx_axis_tkeep [i] ),
.i_btx_axis_tready ( brx_axis_tready [i] ),
//Low Speed AXIS Interface to datapath
.o_ls_axis_tvalid ( lsi_axis_tvalid [i] ),
.o_ls_axis_tdata ( lsi_axis_tdata [i] ),
.o_ls_axis_tlast ( lsi_axis_tlast [i] ),
.o_ls_axis_tuser ( lsi_axis_tuser [i] ),
.o_ls_axis_tkeep ( lsi_axis_tkeep [i] ),
.i_ls_axis_tready ( lsi_axis_tready [i] )
);
assign s_apb_s2m_host [(i*num_host_mod)+ctrl_evt].pready = 0;
assign s_apb_s2m_host [(i*num_host_mod)+ctrl_evt].prdata = 0;
assign s_apb_s2m_host [(i*num_host_mod)+ctrl_evt].pserr = 0;
end
endgenerate包含具有低速控制帧解析、IP/MAC 管理、事件上报功能的rx_ls_parser IP 核;
rx_ls_parser #(
.AXI_DWIDTH ( `HOST_WIDTH ),
.AXI_LS_DWIDTH ( 8 ),
.ENUM_DWIDTH ( ENUM_DWIDTH ),
.MTU ( `HOST_MTU ),
.NUM_LS_RX_INST ( NUM_LS_RX_INST ),
.NUM_LS_TX_INST ( NUM_LS_TX_INST ),
.NUM_HOST ( `HOST_IF_INST ),
.UUID ( `UUID ),
.SYNC_CLK ( SYNC_CLK_HIF_APB )
) u_rx_ls_parser (
.i_pclk ( i_hif_clk ),
.i_prst ( o_hif_rst ),
.i_aclk ( i_apb_clk ),
.i_arst ( o_apb_rst ),
.i_apb_m2s_ecb ( s_apb_m2s_dev [3] ),
.o_apb_s2m_ecb ( s_apb_s2m_dev [3] ),
.i_apb_m2s_evt ( s_apb_m2s_dev [2] ),
.o_apb_s2m_evt ( s_apb_s2m_dev [2] ),
.o_apb_m2s_evt ( m_apb_m2s [3] ),
.i_apb_s2m_evt ( m_apb_s2m [3] ),
.i_apb_m2s_ram ( s_apb_m2s_ram [1] ),
.o_apb_s2m_ram ( s_apb_s2m_ram [1] ),
//Low Speed AXIS Interface to Packet proc
.i_axis_tvalid ( lsi_axis_tvalid ),
.i_axis_tdata ( lsi_axis_tdata ),
.i_axis_tlast ( lsi_axis_tlast ),
.i_axis_tuser ( lsi_axis_tuser ),
.i_axis_tkeep ( lsi_axis_tkeep ),
.o_axis_tready ( lsi_axis_tready ),
// Input Control Data
.i_init_done ( init_done_hif_clk ),
.i_ptp_clk ( i_ptp_clk ),
.i_ptp_rst ( o_ptp_rst ),
.i_ptp ( {ptp_sec, ptp_nano_sec} ),
.i_ptp_hif ( {ptp_sec_sync_hif, ptp_nano_sec_sync_hif} ),
.i_dev_mac_addr ( dev_mac_addr ),
.i_eeprom_ip_addr ( eeprom_base_ip_addr ),
.i_eeprom_ip_addr_vld ( eeprom_ip_addr_vld_hif_clk ),
.i_hsb_stat ( hsb_stat ),
.o_dev_ip_addr ( dev_ip_addr ),
.i_enum_data ( enum_data ),
.i_evt_vec ( event_vec ),
.i_pkt_inc ( pkt_inc ),
.i_pps ( pps ),
// APB interface
.o_apb_m2s_ecb ( m_apb_m2s [0] ),
.i_apb_s2m_ecb ( m_apb_s2m [0] ),
//Low Speed AXIS Interface to ethernet output at full speed
.o_axis_tvalid ( lso_axis_tvalid ),
.o_axis_tdata ( lso_axis_tdata ),
.o_axis_tlast ( lso_axis_tlast ),
.o_axis_tuser ( lso_axis_tuser ),
.o_axis_tkeep ( lso_axis_tkeep ),
.i_axis_tready ( lso_axis_tready )
);包含具有发送端优先级调度(数据面 > PTP > 控制 > 流控 > 桥接)的IP 核;
generate
for (i=0; i<`HOST_IF_INST; i++) begin: gen_eth_pkt
assign tx_axis_tvalid[i] = {btx_axis_tvalid [i], // bridge
pause_axis_tvalid [i], // pause
lso_axis_tvalid [i], // arp/icmp/udp_loopback
ptp_tx_axis_tvalid_gated [i], // ptp
dp_axis_tvalid [i]}; // sensor data
assign tx_axis_tlast[i] = {btx_axis_tlast [i],
pause_axis_tlast [i],
lso_axis_tlast ,
ptp_tx_axis_tlast [i],
dp_axis_tlast [i]};
assign tx_axis_tdata[i] = '{ dp_axis_tdata [i],
ptp_tx_axis_tdata [i],
lso_axis_tdata ,
pause_axis_tdata [i],
btx_axis_tdata [i]};
assign tx_axis_tkeep[i] = '{ dp_axis_tkeep [i],
ptp_tx_axis_tkeep [i],
lso_axis_tkeep ,
pause_axis_tkeep [i],
btx_axis_tkeep [i]};
assign tx_axis_tuser[i] = { btx_axis_tuser [i],
pause_axis_tuser [i],
lso_axis_tuser ,
ptp_tx_axis_tuser [i],
dp_axis_tuser [i]};
assign {btx_axis_tready [i],
pause_axis_tready [i],
lso_axis_tready [i],
ptp_tx_axis_tready [i],
dp_axis_tready [i]} = tx_axis_tready[i];
eth_pkt #(
.N_INPT ( PORT_NUM ),
.W_DATA ( `HOST_WIDTH ),
.SYNC_CLK ( SYNC_CLK_HIF_APB )
) u_eth_pkt (
.i_pclk ( i_hif_clk ),
.i_prst ( o_hif_rst ),
// Register Map, abp clk domain
.i_aclk ( i_apb_clk ),
.i_arst ( o_apb_rst ),
.i_apb_m2s ( s_apb_m2s_host [(i*num_host_mod)+eth_pkt] ),
.o_apb_s2m ( s_apb_s2m_host [(i*num_host_mod)+eth_pkt] ),
.o_pkt_inc ( pkt_inc [i] ),
//PTP Timestamp
.o_ptp_val ( ptp_val [i] ),
.o_del_req_val ( del_req_val [i] ),
// AXIS From Multiple Sources
.i_axis_tvalid ( tx_axis_tvalid [i] ),
.i_axis_tlast ( tx_axis_tlast [i] ),
.i_axis_tkeep ( tx_axis_tkeep [i] ),
.i_axis_tdata ( tx_axis_tdata [i] ),
.i_axis_tuser ( tx_axis_tuser [i] ),
.o_axis_tready ( tx_axis_tready [i] ),
// AXIS to MAC
.o_axis_tvalid ( o_hif_axis_tvalid [i] ),
.o_axis_tlast ( o_hif_axis_tlast [i] ),
.o_axis_tdata ( o_hif_axis_tdata [i] ),
.o_axis_tkeep ( o_hif_axis_tkeep [i] ),
.o_axis_tuser ( o_hif_axis_tuser [i] ),
.i_axis_tready ( i_hif_axis_tready [i] )
);
end
endgenerate3、传感器接口(SIF)子系统
- packetizer_top:传感器数据分片、虚拟端口(VP)打包
- dp_pkt_top:数据面封装(ETH+IP+UDP 头、PTP 时间戳插入)
- sensor_tx_pkt_proc:控制帧转发到传感器
- tx_stream_buffer:传感器输出流控与缓冲
4、PTP 时间同步子系统
- ptp_top:IEEE 1588-2008 PTPv2 协议栈
- 输出:秒 / 纳秒 / 1PPS
- 跨时钟域同步到 HIF/APB
5、控制与外设子系统
- apb_intc_top:APB 总线中央路由
- sys_init + eeprom_info:上电初始化、MAC / 序列号读取
- glb_ctrl_top:全局寄存器、GPIO、软件复位
- SPI/I2C/UART:外设控制器
- 桥接(BRIDGE):FPGA-FPGA 数据转发、路由表
6、模块间关系(逻辑接口)
- 所有模块通过 AXI-Stream 互联(tvalid/tlast/tdata/tkeep/tuser)
- 所有配置通过 APB 总线完成
- 时钟复位由 reset_gen 统一分发
三、总结
上面总结一句话就是告知系统要做什么、由哪些功能模块组成、以及模块间接口关系。
由于代码与内容篇幅比较长,后面三部分做简单的总结,全部代码可加vx hope_0793一起讨论咨询;