插件功能:
Physics-Based 可选的"基于物理"的抓取脚本;可在拇指与手指之间、或手指与手掌之间拾取物体。
SG_Interactable脚本,可扩展以在VR中创建任何形式的交互。
Basic SG_Grabable表示一个可以被拾起并以多种方式放置的对象,支持单手或多手同时操作。
用于检测 SG_Grabable objects的DropZones和SnapZones,可在VR中快速创建装配任务。
Hand Detection zones手部检测区域用于检测手的刚体,可用于创建简单的按钮或交互区域。
Calibration Scene 应于初始阶段加入一个"校准场景",该场景将引导用户完成校准过程,以实现最佳追踪效果。此外,用户还可选择激活校准图层或使用SenseCom软件。
SG_Material脚本为任意GameObject分配力反馈属性。力响应基于碰撞体穿透深度(我们进入碰撞体内部的距离)。
Hand Physics Bodies手部物理体用于推动物体或防止手部穿过虚拟桌子。
Passthrough layer可选的穿透层,防止手指进入虚拟对象
Deform当你挤压物体时,用于变形(视觉)网格的脚本。
访问底层C#类以实现扩展功能(访问原始传感器数据、设备信息)
有关Unity插件中可用的功能和特性,请查看官方变更日志,或在unityPackage内查找。
https://github.com/Adjuvo/SenseGlove-Unity/wiki/ChangeLog
重要脚本和类
Unity SenseGlove Unity插件包含多个脚本,协同工作以动画虚拟手部并提供沉浸式触觉
反馈。所有这些的核心是SGTrackedHand。
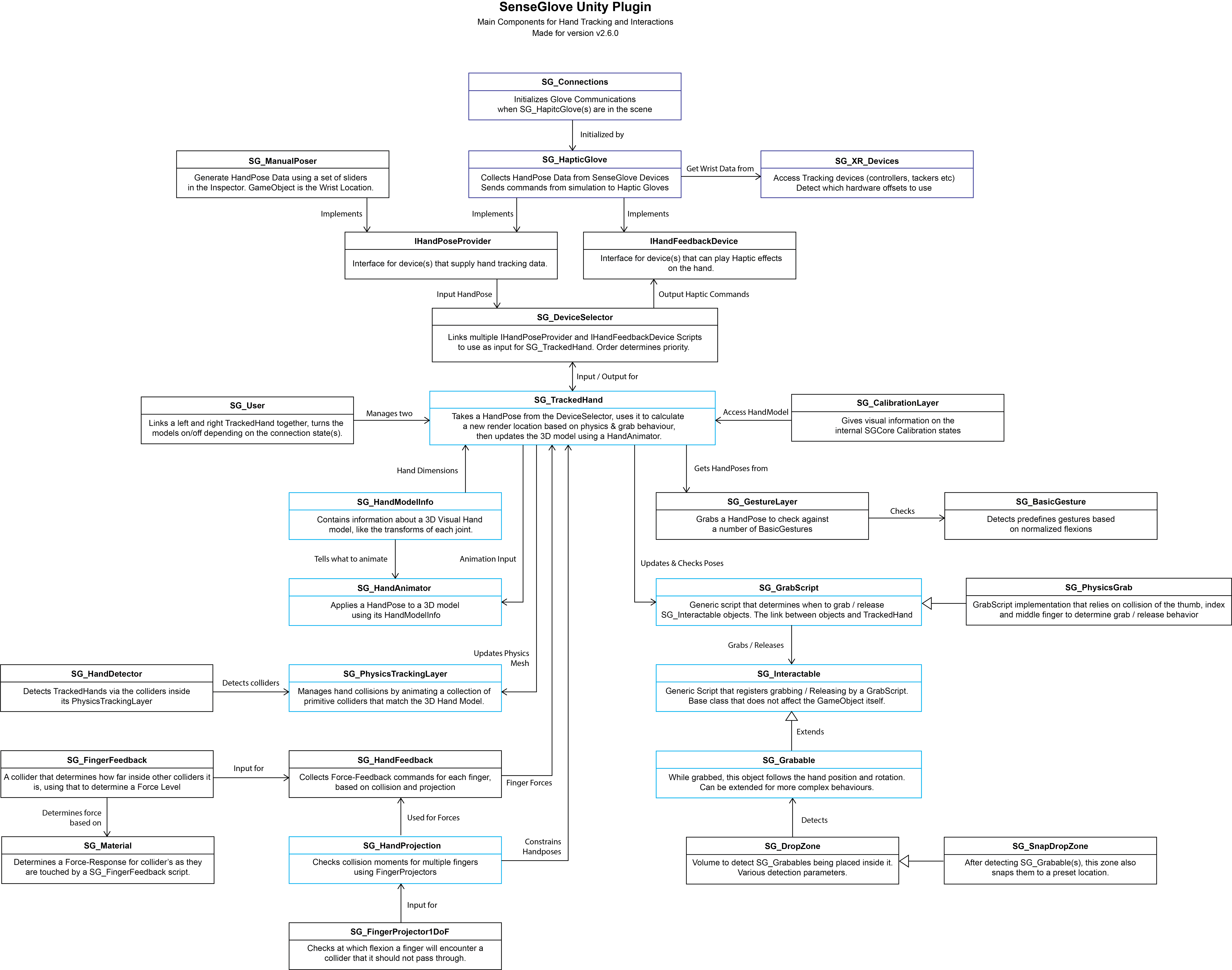
注意,可以通过编写实现 IHandPoseProvider 和IHandFeedbackDevice 接口的脚本来将设备与SenseGlove Unity插件集成。
Navigating through different layers
在使用SenseGlove预制件时,用户能够从一个可抓取对象的检测区域导航至握持该对象的跟踪手部位置。自此处出发,便可访问构成预制件的各个其他"层"
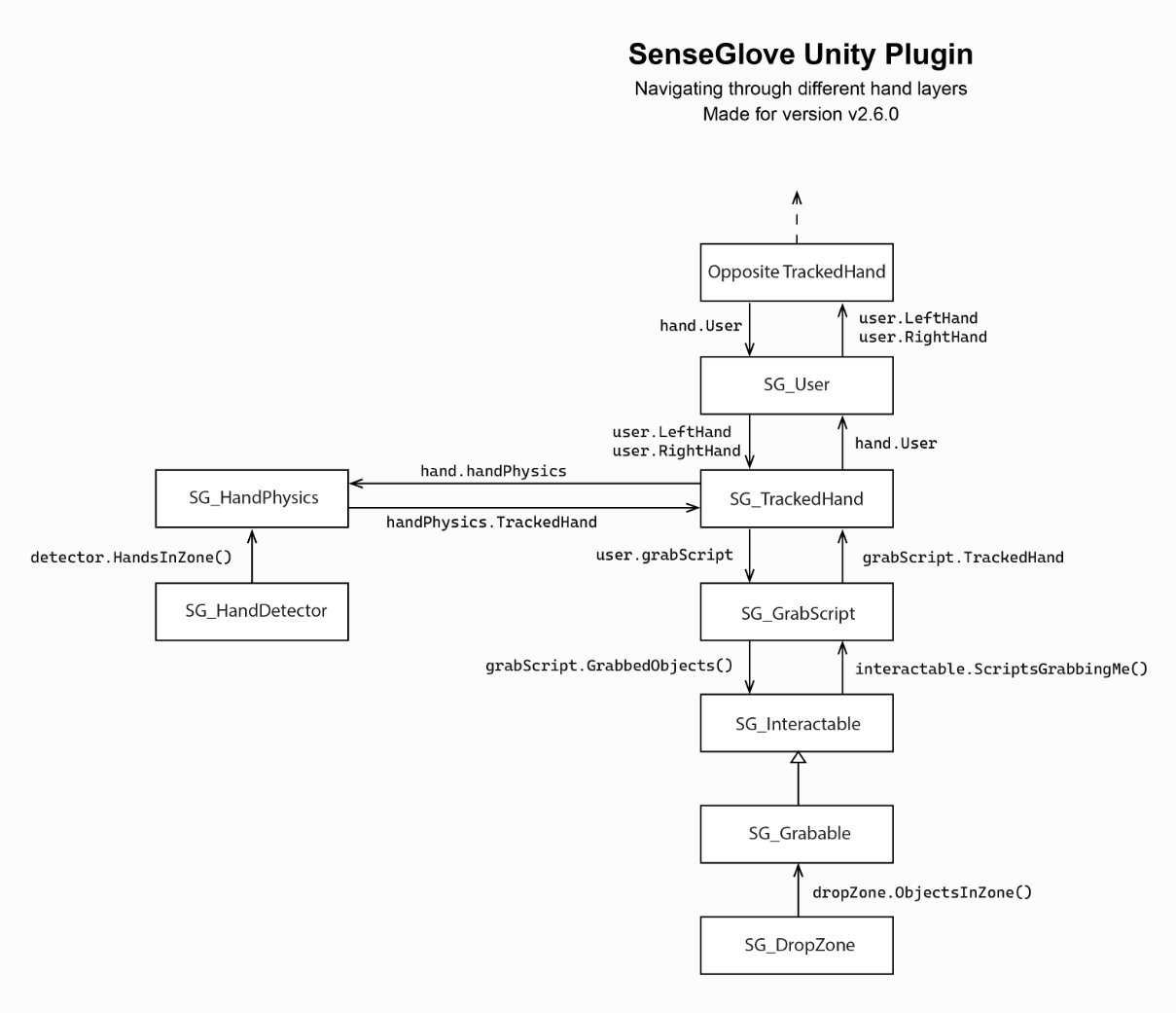
各种SenseGlove脚本均实现了IHandFeebackDevice接口,从而使得用户能够 "自下而上"地传递触觉指令,而无需亲自进行操作。
例如,当在SG_DropZone上调用SendCustomWaveform()方法时,该方法会将所指定的波形发送给其碰撞体范围内的所有对象。这些对象继而会将触觉指令传递给每个正抓取它们的双手。