摘要
针对自适应巡航控制车辆在过渡行驶工况中存在的安全距离保持、执行器约束及控制平顺性问题,本文构建一种基于模型预测控制的车辆纵向运动控制方法。该方法采用离散化车辆纵向误差模型,选取相对距离、相对速度与车辆加速度作为状态变量,将输入加速度、安全车间距、控制时域等约束融入优化问题。依托 MATLAB 仿真平台设计 18 组实验工况,探究约束形式、安全车间距策略、执行器时滞、控制时域、权重矩阵及前车加速场景的影响,选取最小安全裕度、控制能耗、速度误差均方根、终端误差、二次规划求解成功率作为评价指标。仿真结果表明:完整约束控制在静止前车场景下可将最小安全裕度维持在 0.052 m,二次规划求解成功率达 100%;仅采用输入饱和约束时安全裕度为 - 49.590 m,缺失预测约束会大幅提升碰撞风险。执行器时滞从 0.25 s 增至 0.75 s 时,最小安全裕度由 0.483 m 降至 - 4.575 m,执行器动态特性对行车安全影响显著。研究验证了模型预测控制应用于多约束车辆纵向控制的有效性,同时明确了控制参数与安全裕度、控制能耗之间的权衡关系。
关键词
自适应巡航控制;模型预测控制;安全车间距离;车辆纵向控制;二次规划;参数敏感性
引言
自适应巡航控制是智能车辆纵向控制系统的核心模块,其核心目标是在保障行驶平顺性、满足动力学约束的前提下,使自车与前车始终保持安全间距。相较于传统定速巡航,自适应巡航系统需实时应对前车车速变化、执行器滞后、加速度限值等多重约束,尤其在前车静止、加速以及车辆切换至跟驰状态等过渡工况下,控制器既要快速修正相对速度,又要避免控制量突变影响乘坐舒适性,或是出现控制指令无法执行的问题。
传统 PID、线性反馈等控制方式结构简单,但难以显性处理多变量约束。模型预测控制可在滚动时域内预判车辆未来运行状态,通过求解带约束的优化问题输出最优控制量,适配自适应巡航车辆过渡工况的控制需求。本文以车辆纵向误差系统为研究对象,建立离散预测模型与约束二次规划模型,结合多组仿真实验,分析约束条件、控制时域、执行器时滞、权重参数对系统综合性能的影响。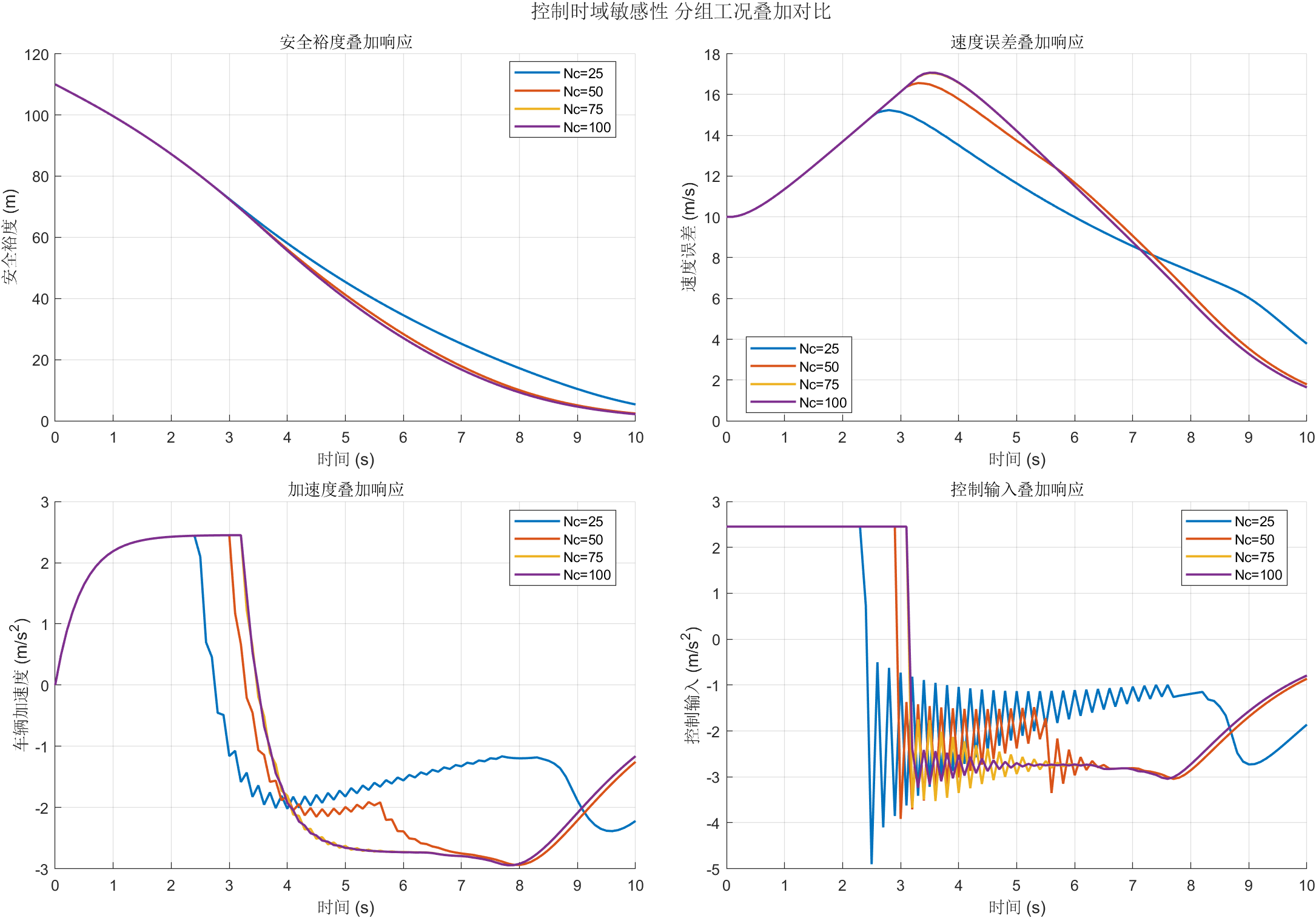
方法
本文以自适应巡航车辆纵向控制系统为研究对象,将相对距离误差、相对速度误差、车辆加速度构建为系统状态误差向量。设置采样周期 0.1 s,总仿真时长 10 s,执行器基准时滞 0.5 s;控制输入为车辆期望加速度,驱动侧上限设为 0.25g,制动侧下限设为 - 0.5g,匹配车辆实际驱动与制动极限。
车辆纵向误差模型离散形式如下:
\(e(k+1)=\Phi e(k)+\Gamma u(k)\)
式中:\(e(k)\) 为k时刻系统状态误差,\(u(k)\) 为控制输入,结合输出矩阵提取相对距离、相对速度状态量。
控制器采用有限时域优化架构,预测时域、控制时域基准值均取 100。优化目标函数综合考虑状态误差、终端误差与控制输入损耗:
\(J=\sum_{i=1}^{N_p} e_i^T Q e_i+\sum_{i=1}^{N_c} u_i^T R u_i+e_{N_p}^T S e_{N_p}\)
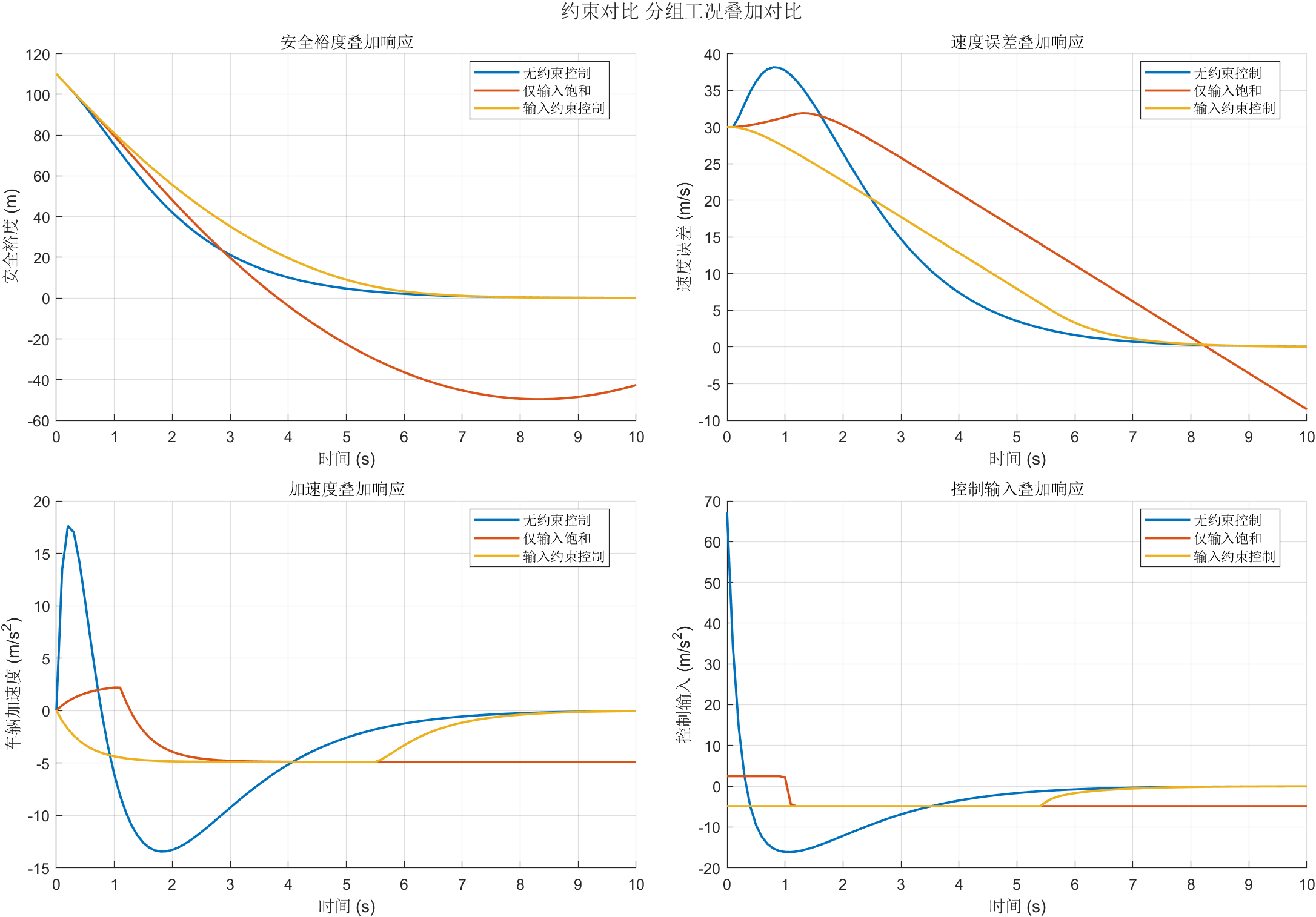
式中:Q、R、S 依次为状态权重矩阵、输入权重矩阵、终端权重矩阵;\(N_p\) 为预测时域,\(N_c\) 为控制时域。模型约束包含控制输入边界、安全车间距离、终端等式约束。实验设置无约束、仅输入饱和、全输入约束三类方案开展对比分析。
安全车间距离分为固定安全距离、动态安全距离两种策略:固定策略将安全距离与参考轨迹线性关联;动态策略依据相对速度、车辆最大制动能力计算安全间距。数值求解选用 active-set 算法,通过热启动、Hessian 矩阵对称化处理提升计算稳定性,同步统计每一步二次规划求解状态,评判算法可靠性。
本次实验共计 18 组工况,划分为约束对比、安全距离策略对比、时滞敏感性、控制时域敏感性、权重敏感性、前车加速场景六大类别。选取最小相对距离、最小安全裕度、碰撞标志、极值加速度、控制量幅值、控制能耗、速度误差均方根、终端位置与速度误差、二次规划求解成功率作为综合评价指标。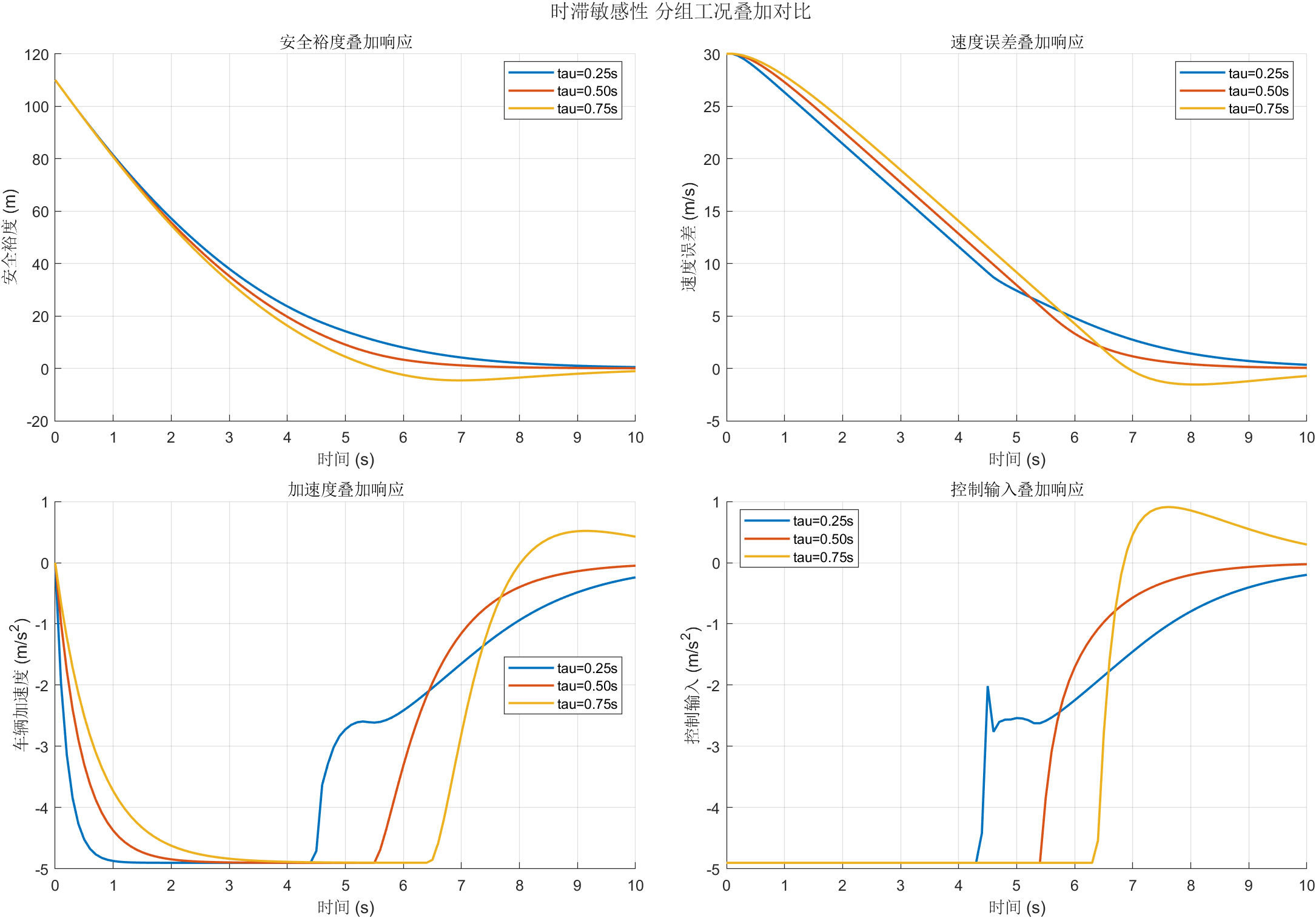
结果
所有 18 组工况的二次规划求解成功率均为 100%,该优化算法在多组参数组合下具备良好的数值稳定性。
约束对比实验结果:无约束控制最小安全裕度 0.079 m,控制能耗 817.735;仅输入饱和控制最小安全裕度 - 49.590 m,存在严重安全隐患,控制能耗 221.050;全输入约束控制最小安全裕度 0.052 m,控制能耗 136.550。结果证明,单一输入饱和约束无法保障行车间距安全,引入预测约束可在低能耗前提下守住安全边界。
安全距离策略对比实验:固定安全距离策略最小安全裕度 0.052 m,未出现安全越界;动态安全距离策略最小安全裕度 - 110.603 m。动态安全距离策略若无法适配终端条件与初始相对状态,会出现约束失配、保守性不足的问题,需结合实际工况重新参数整定。
执行器时滞敏感性实验:时滞 0.25 s 时,最小安全裕度 0.483 m,控制能耗 121.550;时滞 0.50 s 时,最小安全裕度 0.052 m,控制能耗 136.550;时滞 0.75 s 时,最小安全裕度 - 4.575 m,控制能耗 157.320。执行器滞后时间越长,控制器修正误差的能力越弱,系统被迫增大控制量,安全性能持续下降。
控制时域敏感性实验:控制时域\(N_c\)取 25、50、75、100 时,对应最小安全裕度依次为 5.356 m、2.381 m、2.169 m、2.167 m,控制能耗依次为 43.826、59.058、63.603、63.019。短控制时域方案安全裕度更高、能耗更低,但控制策略偏保守;增大控制时域后系统运行更平稳,安全裕度不再提升。
权重矩阵敏感性实验:侧重速度误差时,最小安全裕度 10.822 m,控制能耗 14.333;权重均衡配置时,最小安全裕度 0.266 m,控制能耗 40.466;侧重距离误差时,最小安全裕度 - 0.025 m,控制能耗 68.713。权重矩阵直接决定控制器优化方向,过度侧重距离误差会增大控制能耗,还易引发安全边界风险。
前车加速场景实验:执行器时滞 0.25 s、0.50 s、0.75 s 对应的最小安全裕度分别为 - 31.013 m、-30.610 m、-30.255 m,控制能耗依次为 54.897、63.648、75.427。该场景下全部工况均出现负安全裕度,现有约束与权重配置难以适配前车加速、初始间距偏小的复杂过渡工况。