目录
[4.1 转速外环控制(DRCNC控制器)](#4.1 转速外环控制(DRCNC控制器))
[4.2 电流误差计算](#4.2 电流误差计算)
[4.3 双PI电流内环控制](#4.3 双PI电流内环控制)
[4.4 反Park变换(IPARK)](#4.4 反Park变换(IPARK))
[4.5 SVPWM调制](#4.5 SVPWM调制)
[4.6 三相电流采样与Clarke变换](#4.6 三相电流采样与Clarke变换)
[4.7 Park变换](#4.7 Park变换)
✨1.课题概述
永磁同步电机(PMSM)磁场定向矢量控制系统,核心采用DRCNC控制器实现转速外环控制,双PI控制器实现电流内环控制,结合坐标变换与SVPWM调制实现电机的高性能驱动。
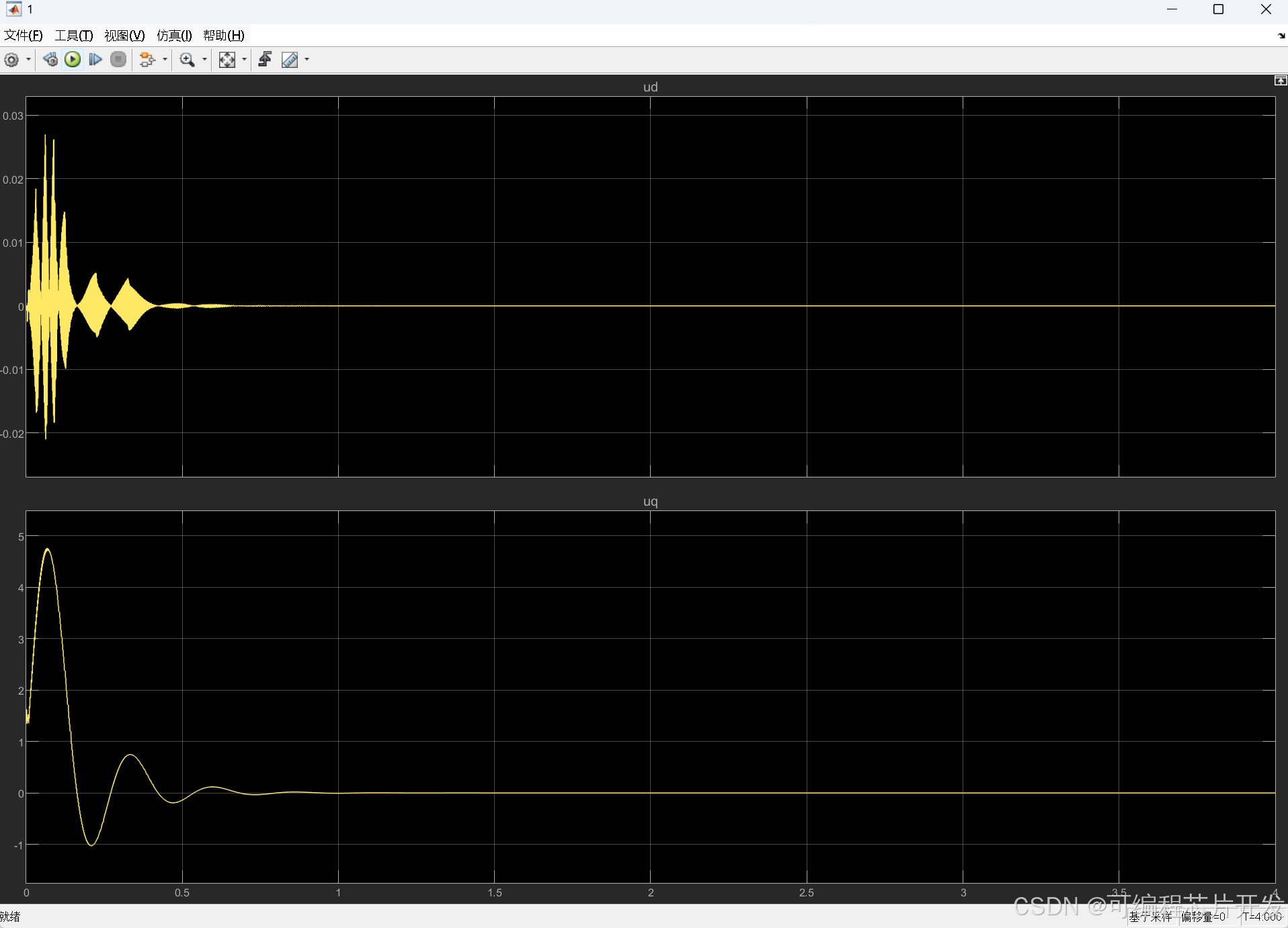
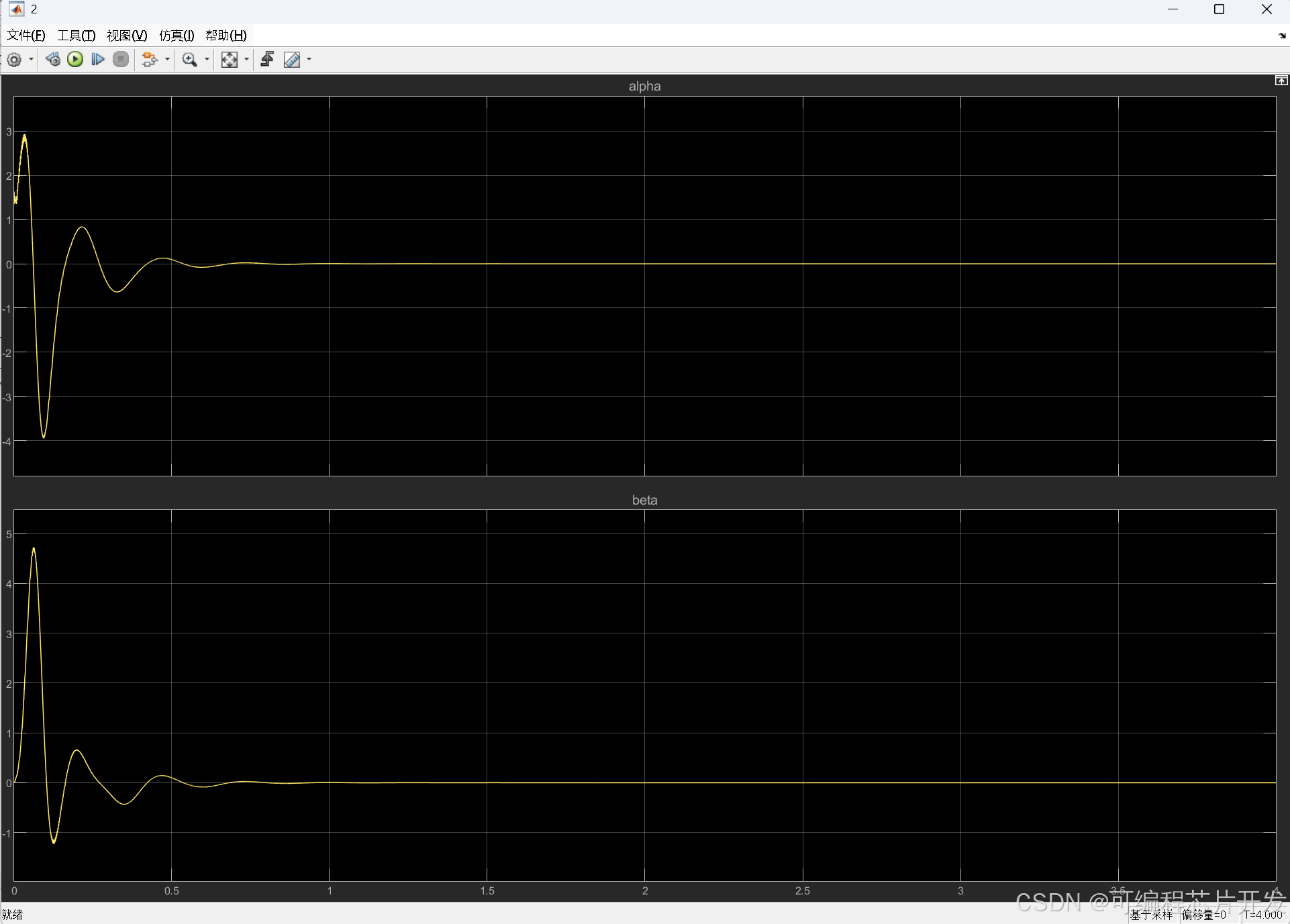
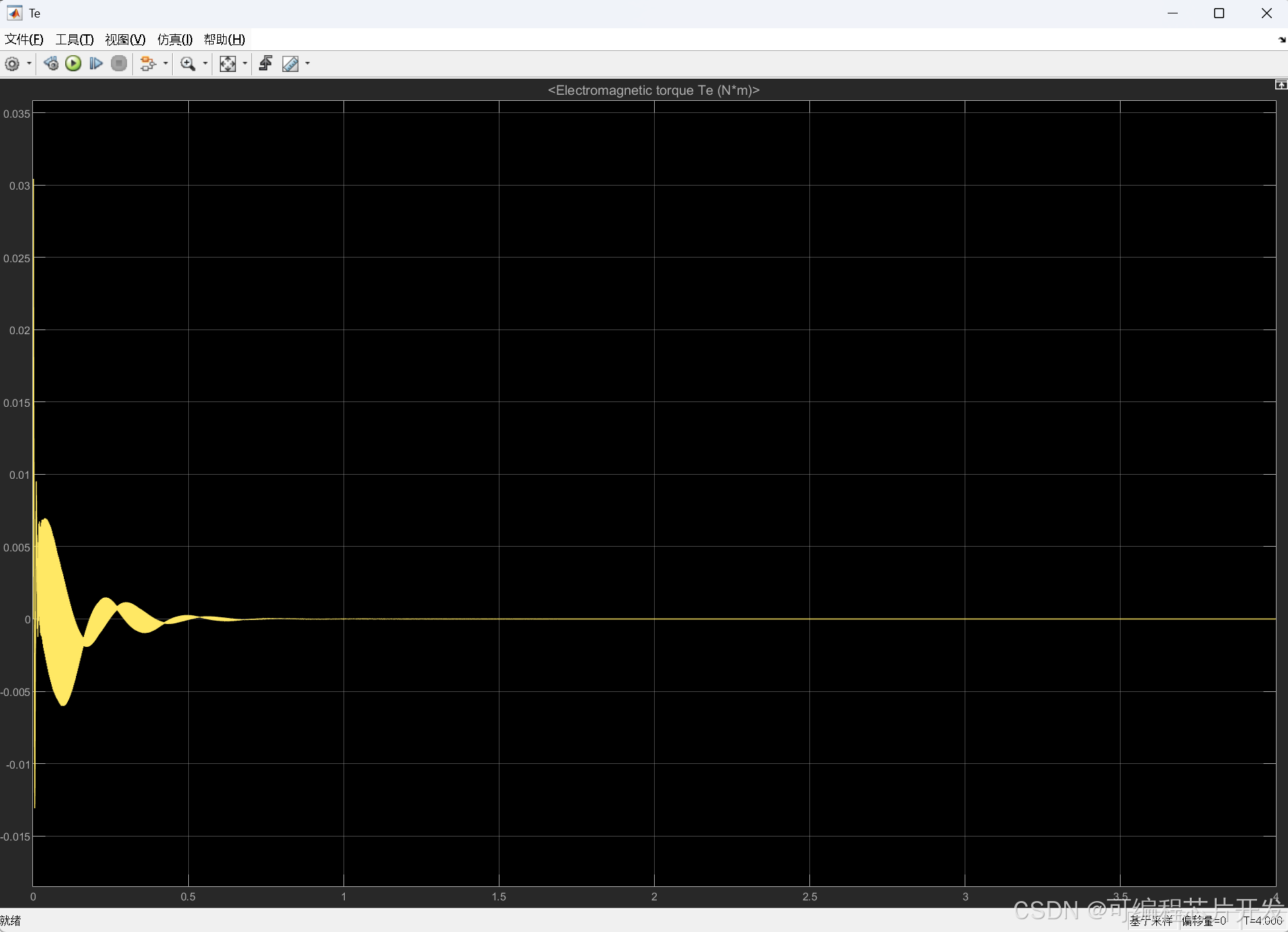
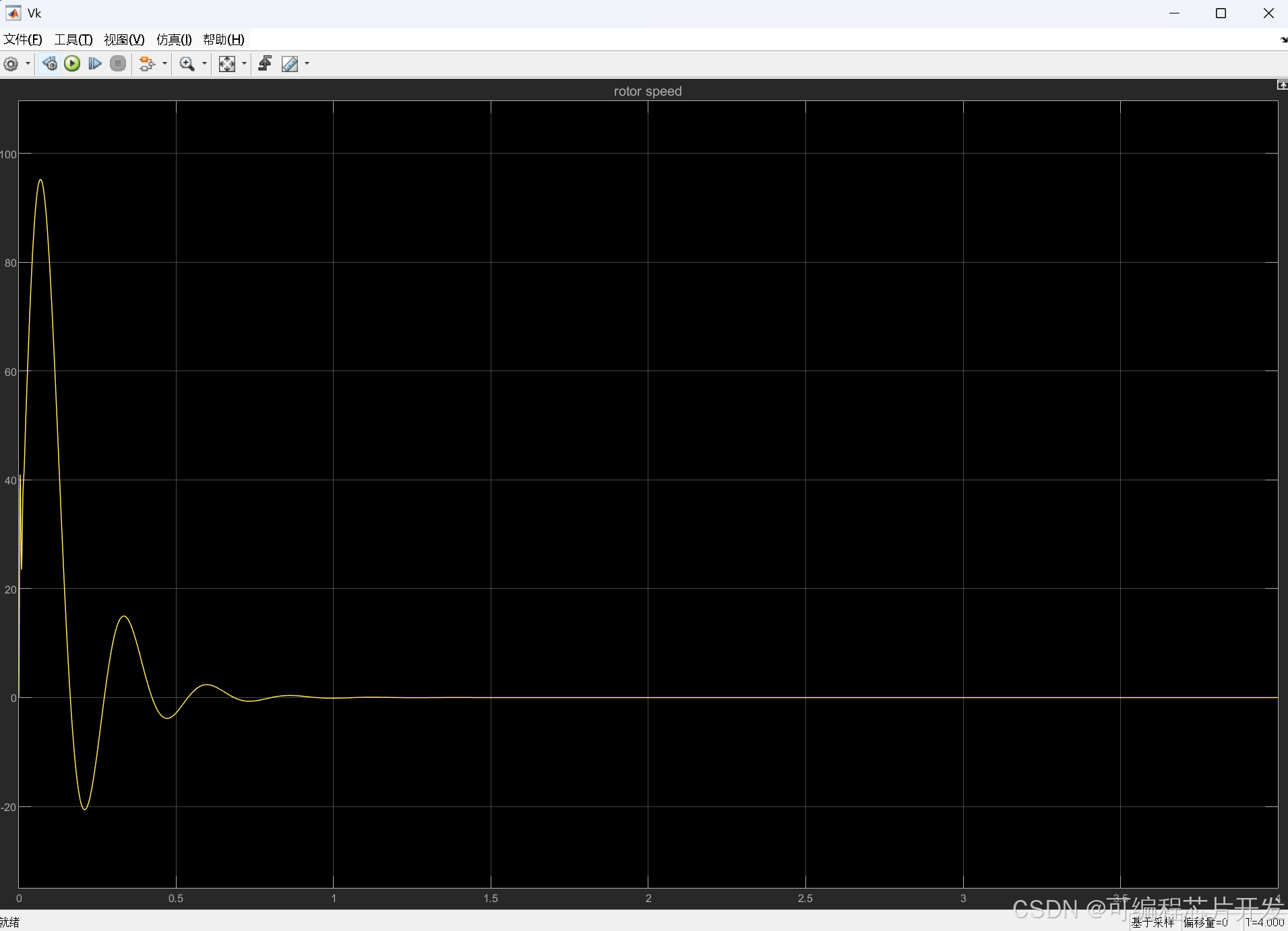
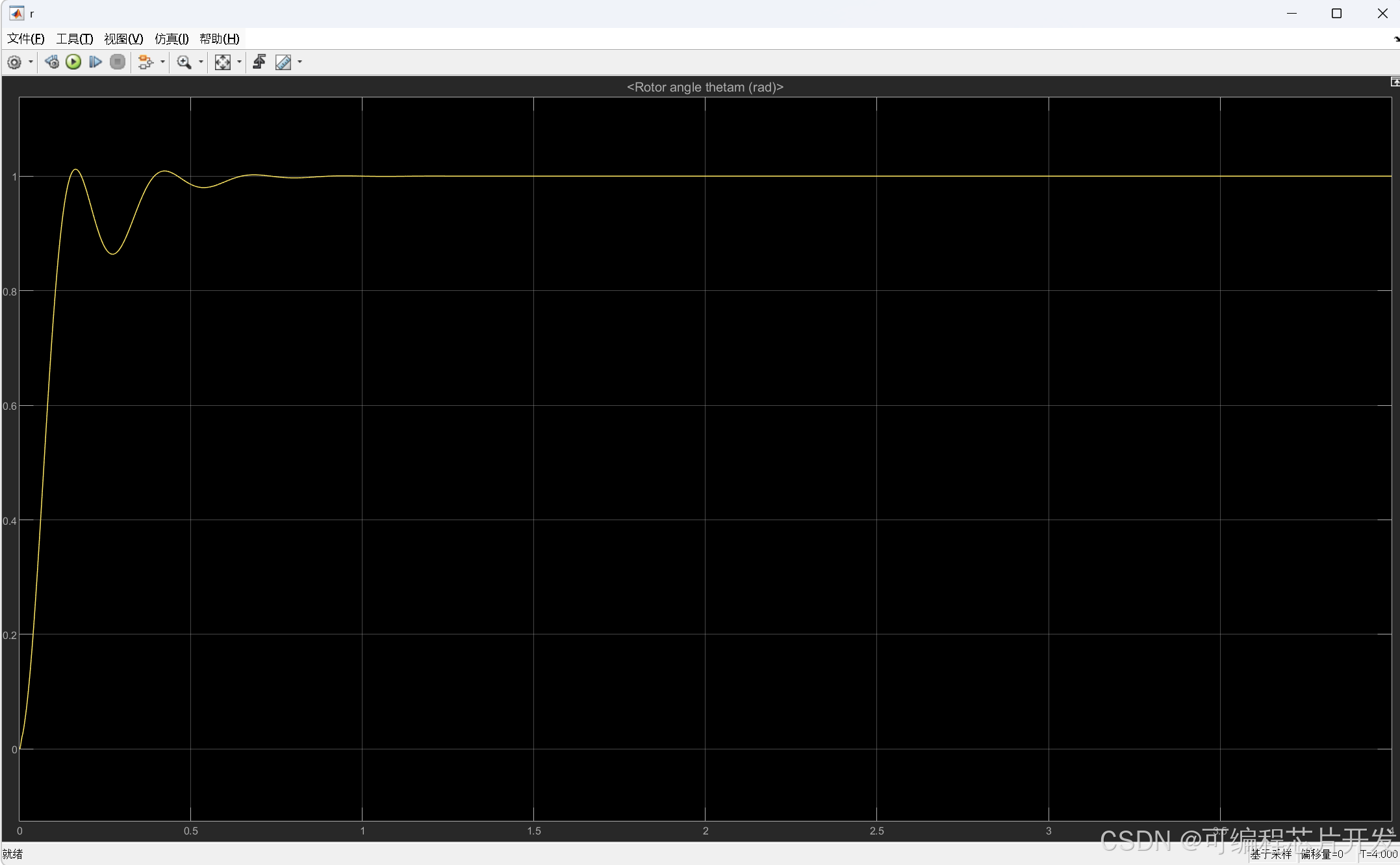
📊2.系统仿真结果

✅3.核心程序或模型
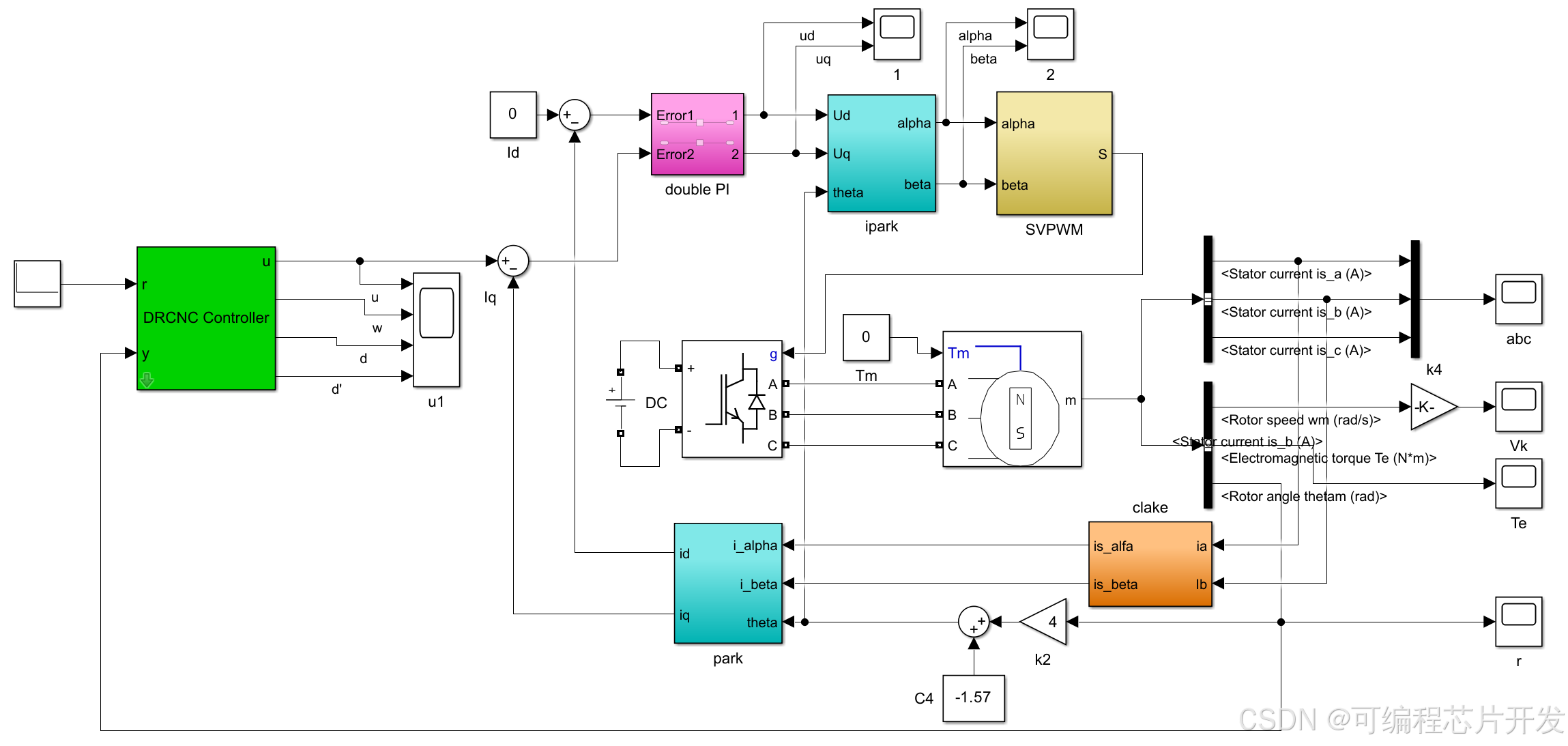
🚀4.系统原理简介
该系统的核心是磁场定向控制(FOC),通过坐标变换将永磁同步电机的三相交流电流解耦为等效直流的励磁电流(id)和转矩电流(iq),实现与直流电机类似的转矩控制特性。DRCNC控制器作为转速外环,负责跟踪给定转速并输出转矩电流指令;双PI控制器作为电流内环,快速跟踪id、iq指令并生成电压指令,最终通过SVPWM驱动逆变器,实现电机的高精度调速。
4.1 转速外环控制(DRCNC控制器)
DRCNC控制器接收转速给定信号r和电机实际转速反馈,通过闭环调节输出转矩电流指令iq∗,同时保持励磁电流指令id∗=0(表贴式PMSM常用控制策略,最大化转矩电流比)。DRCNC控制器本质是一种非线性鲁棒控制器,其核心控制律可表示为:

其中,eω=ω∗−ω为转速误差,Kp、Ki为比例积分系数,Krc为鲁棒补偿系数,sign(⋅)为符号函数,用于抑制系统扰动与参数不确定性。
4.2 电流误差计算
将电流指令id∗=0、iq∗与反馈电流id、iq做差,得到电流误差信号,作为双PI控制器的输入:

4.3 双PI电流内环控制
双PI控制器分别对d、q轴电流误差进行调节,生成d、q轴电压指令ud、uq,实现电流的快速跟踪控制。PI控制器的传递函数与时域表达式为:
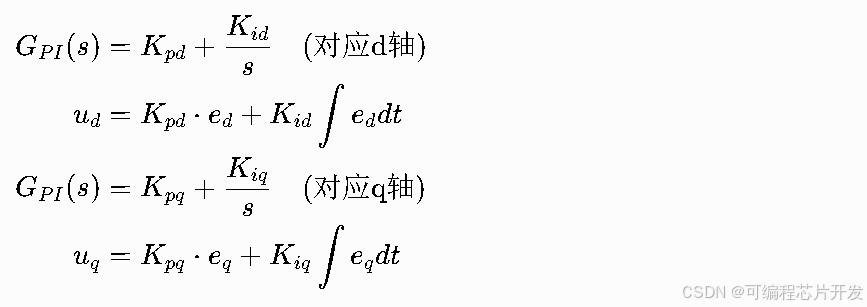
其中,Kpd、Kid为d轴PI控制器的比例、积分系数;Kpq、Kiq为q轴PI控制器的比例、积分系数。
4.4 反Park变换(IPARK)
将旋转坐标系下的电压指令ud、uq转换为静止坐标系下的α、β轴电压uα、uβ,为SVPWM调制做准备。反Park变换的核心公式为:

其中,θ为电机转子电角度,由位置传感器测得并经过坐标补偿。
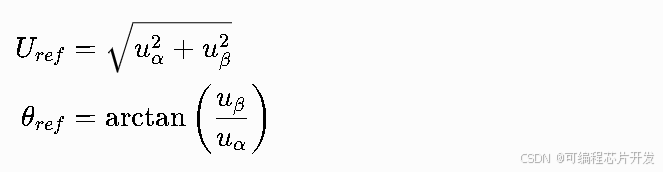
4.5 SVPWM调制
根据uα、uβ电压指令,通过空间矢量脉宽调制生成三相逆变器的驱动信号,实现对电机的电压控制。SVPWM的核心原理是将电压矢量合成目标电压,通过计算扇区、作用时间和占空比生成 PWM信号。首先计算参考电压矢量的幅值与角度:
再根据所在扇区计算基本电压矢量的作用时间T1、T2,最终生成三相桥臂的占空比信号,驱动逆变器输出目标电压。
4.6 三相电流采样与Clarke变换
通过电流传感器采集电机三相定子电流ia、ib、ic,利用Clarke变换将其转换为静止坐标系下的
α、β轴电流iα、iβ,为后续Park变换做准备。Clarke变换公式为:

4.7 Park变换
将静止坐标系下的α、β轴电流iα、iβ转换为旋转坐标系下的d、q轴电流id、iq,实现电流的解耦控制。Park变换的核心公式为:

其中,θ为电机转子电角度,与反Park变换使用同一角度信号,保证坐标变换的一致性。
**解耦控制:**通过坐标变换将三相交流电流解耦为直流分量,实现了励磁电流与转矩电流的独立控制,使PMSM具备了类似直流电机的高性能调速特性。
**双闭环结构:**电流内环响应速度快,可快速跟踪电流指令,抑制电流扰动;转速外环通过DRCNC 控制器实现高精度转速跟踪,鲁棒性强,能有效抑制负载扰动与参数变化。
**DRCNC控制器优势:**相较于传统PI转速控制器,DRCNC控制器引入了非线性鲁棒补偿项,在电机参数摄动、负载扰动等工况下,仍能保持优异的转速跟踪性能和抗扰能力。
**SVPWM调制:**相较于传统SPWM,SVPWM的直流母线电压利用率更高,输出电流谐波更小,可降低电机的转矩脉动与噪声,提升系统效率。
💢5.完整工程文件
v v
关注后,GZH回复关键词:a47