摘要
多视图 3D 几何 Transformer(如 DUSt3R、MASt3R、π³)精度惊人,但全连接注意力的 O ( N 2 ) O(N^2) O(N2) 复杂度使其无法实时运行。Imperial College London 的 KV-Tracker 提出了一个无需额外训练的加速方案:在映射阶段缓存全局自注意力的 Key-Value 对,追踪阶段仅编码单帧并查询缓存,实现约 15× 加速 和 27 FPS 实时跟踪。在 TUM RGB-D 上 ATE 0.108m,超越 TTT3R(0.132m)和 CUT3R(0.272m)。
一、问题背景:Transformer 几何网络的实时困境
以 DUSt3R/MASt3R/π³ 为代表的多视图 Transformer 网络,通过全局自注意力机制在多帧之间建立密集对应关系,实现了极高的 3D 重建和位姿估计精度。但核心瓶颈在于:
- 全连接注意力复杂度 O ( ( N M ) 2 ) O((NM)^2) O((NM)2) : N N N 帧图像,每帧 M M M 个 token,全局注意力需要所有 token 两两计算------帧数翻倍,计算量翻四倍
- 流式方法的漂移问题:CUT3R、TTT3R 等尝试用因果注意力做流式推理,但丢失了双向上下文导致累积漂移和灾难性遗忘
KV-Tracker 的切入点:映射阶段用完整双向注意力保证质量,追踪阶段用 KV-Cache 跳过重复计算,在精度和速度之间找到最优平衡。关键是------不需要重新训练模型。
二、核心方法
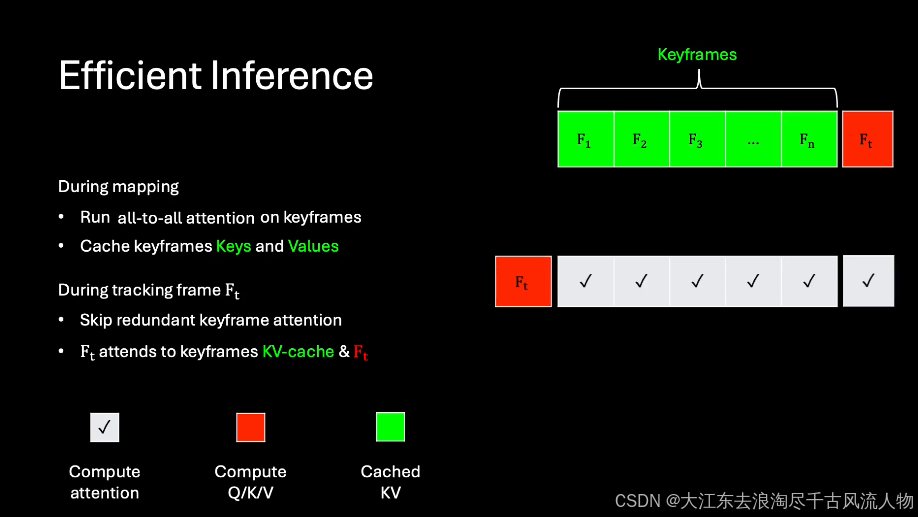
图 1:KV-Tracker 双阶段架构。映射阶段用完整双向注意力处理关键帧并缓存 KV 对(黄色),追踪阶段新帧仅编码自身并查询缓存,实现 15× 加速。重绘自 design skill
2.1 基础模型:π³
KV-Tracker 选择 π³ 作为基础模型(而非 DUSt3R/MASt3R),原因是 π³ 去掉了 camera register token,对参考视角的敏感度更低。
π³ 采用 decoder-only Transformer 架构:
- 输入图像经 ViT 骨干编码为 token 序列 X 1 : N ∈ R M × d k X_{1:N} \in \mathbb{R}^{M \times d_k} X1:N∈RM×dk
- L L L 层解码层交替使用帧内自注意力 和全局自注意力
- 独立解码头预测:相机位姿 T n ∈ S E ( 3 ) T_n \in SE(3) Tn∈SE(3)、点云图 P n c ∈ R H × W × 3 P_n^c \in \mathbb{R}^{H \times W \times 3} Pnc∈RH×W×3、置信度 C n ∈ R H × W C_n \in \mathbb{R}^{H \times W} Cn∈RH×W
2.2 KV-Cache 加速机制(核心创新)
标准注意力计算:
Attention ( Q , K , V ) = softmax ( Q K ⊤ d k ) V \text{Attention}(Q, K, V) = \text{softmax}\left(\frac{QK^\top}{\sqrt{d_k}}\right)V Attention(Q,K,V)=softmax(dk QK⊤)V
映射阶段(Mapping) :对关键帧集合执行完整双向全局注意力,复杂度 O ( ( N M ) 2 ) O((NM)^2) O((NM)2)。同时缓存 每层全局注意力块的 Key 和 Value: K ~ , V ~ \tilde{K}, \tilde{V} K~,V~。
追踪阶段(Tracking):新帧到来时,只编码该单帧,在全局注意力中用新帧的 Query 去查询缓存的 KV 对:
Attention ( Q t , K \~ , K t , V \~ , V t ) \text{Attention}(Q_t, \\tilde{K}, K_t, \\tilde{V}, V_t) Attention(Qt,K\~,Kt,V\~,Vt)
其中 Q t Q_t Qt 是新帧的查询向量, K \~ , K t \\tilde{K}, K_t K\~,Kt 是缓存 Key 拼接当前帧 Key。
复杂度对比:
| 阶段 | 复杂度 | 说明 |
|---|---|---|
| 映射(完整) | O ( ( N M ) 2 ) O((NM)^2) O((NM)2) | 双向注意力,只在关键帧更新时执行 |
| 追踪(KV-Cache) | O ( M 2 ( N + 1 ) ) O(M^2(N+1)) O(M2(N+1)) | 新帧 Query 只做一次单向查询 |
从 O ( N 2 M 2 ) O(N^2M^2) O(N2M2) 降到 O ( N M 2 ) O(NM^2) O(NM2)------相对帧数 N N N 从二次降到线性。这就是 15× 加速的来源。
图 2:全局注意力(左)vs KV-Cache 注意力(右)。左图每个 token 需与所有其他 token 交互(红色=在线计算),右图新帧仅查询缓存的 KV(绿色=已缓存,无需重算)。来源:KV-Tracker Fig 3
2.3 关键帧选择策略
采用角度阈值法 :当新帧与已有关键帧集合中任意帧的方位角或仰角差超过阈值 τ \tau τ 时,添加为新关键帧:
min k f ∈ K F ∣ φ t − φ k f ∣ > τ or min k f ∈ K F ∣ θ t − θ k f ∣ > τ \min_{kf \in \mathcal{KF}} |\varphi_t - \varphi_{kf}| > \tau \quad \text{or} \quad \min_{kf \in \mathcal{KF}} |\theta_t - \theta_{kf}| > \tau kf∈KFmin∣φt−φkf∣>τorkf∈KFmin∣θt−θkf∣>τ
这种策略的优势:自适应相机运动------快速旋转时密集采关键帧,静止时不采。比固定间隔策略更高效。
#mermaid-svg-cvVe1wJNdXxK7voY{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#mermaid-svg-cvVe1wJNdXxK7voY .edge-animation-slow{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 50s linear infinite;stroke-linecap:round;}#mermaid-svg-cvVe1wJNdXxK7voY .edge-animation-fast{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 20s linear infinite;stroke-linecap:round;}#mermaid-svg-cvVe1wJNdXxK7voY .error-icon{fill:#552222;}#mermaid-svg-cvVe1wJNdXxK7voY .error-text{fill:#552222;stroke:#552222;}#mermaid-svg-cvVe1wJNdXxK7voY .edge-thickness-normal{stroke-width:1px;}#mermaid-svg-cvVe1wJNdXxK7voY .edge-thickness-thick{stroke-width:3.5px;}#mermaid-svg-cvVe1wJNdXxK7voY .edge-pattern-solid{stroke-dasharray:0;}#mermaid-svg-cvVe1wJNdXxK7voY .edge-thickness-invisible{stroke-width:0;fill:none;}#mermaid-svg-cvVe1wJNdXxK7voY .edge-pattern-dashed{stroke-dasharray:3;}#mermaid-svg-cvVe1wJNdXxK7voY .edge-pattern-dotted{stroke-dasharray:2;}#mermaid-svg-cvVe1wJNdXxK7voY .marker{fill:#333333;stroke:#333333;}#mermaid-svg-cvVe1wJNdXxK7voY .marker.cross{stroke:#333333;}#mermaid-svg-cvVe1wJNdXxK7voY svg{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;}#mermaid-svg-cvVe1wJNdXxK7voY p{margin:0;}#mermaid-svg-cvVe1wJNdXxK7voY .label{font-family:"trebuchet ms",verdana,arial,sans-serif;color:#333;}#mermaid-svg-cvVe1wJNdXxK7voY .cluster-label text{fill:#333;}#mermaid-svg-cvVe1wJNdXxK7voY .cluster-label span{color:#333;}#mermaid-svg-cvVe1wJNdXxK7voY .cluster-label span p{background-color:transparent;}#mermaid-svg-cvVe1wJNdXxK7voY .label text,#mermaid-svg-cvVe1wJNdXxK7voY span{fill:#333;color:#333;}#mermaid-svg-cvVe1wJNdXxK7voY .node rect,#mermaid-svg-cvVe1wJNdXxK7voY .node circle,#mermaid-svg-cvVe1wJNdXxK7voY .node ellipse,#mermaid-svg-cvVe1wJNdXxK7voY .node polygon,#mermaid-svg-cvVe1wJNdXxK7voY .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#mermaid-svg-cvVe1wJNdXxK7voY .rough-node .label text,#mermaid-svg-cvVe1wJNdXxK7voY .node .label text,#mermaid-svg-cvVe1wJNdXxK7voY .image-shape .label,#mermaid-svg-cvVe1wJNdXxK7voY .icon-shape .label{text-anchor:middle;}#mermaid-svg-cvVe1wJNdXxK7voY .node .katex path{fill:#000;stroke:#000;stroke-width:1px;}#mermaid-svg-cvVe1wJNdXxK7voY .rough-node .label,#mermaid-svg-cvVe1wJNdXxK7voY .node .label,#mermaid-svg-cvVe1wJNdXxK7voY .image-shape .label,#mermaid-svg-cvVe1wJNdXxK7voY .icon-shape .label{text-align:center;}#mermaid-svg-cvVe1wJNdXxK7voY .node.clickable{cursor:pointer;}#mermaid-svg-cvVe1wJNdXxK7voY .root .anchor path{fill:#333333!important;stroke-width:0;stroke:#333333;}#mermaid-svg-cvVe1wJNdXxK7voY .arrowheadPath{fill:#333333;}#mermaid-svg-cvVe1wJNdXxK7voY .edgePath .path{stroke:#333333;stroke-width:2.0px;}#mermaid-svg-cvVe1wJNdXxK7voY .flowchart-link{stroke:#333333;fill:none;}#mermaid-svg-cvVe1wJNdXxK7voY .edgeLabel{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-cvVe1wJNdXxK7voY .edgeLabel p{background-color:rgba(232,232,232, 0.8);}#mermaid-svg-cvVe1wJNdXxK7voY .edgeLabel rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-cvVe1wJNdXxK7voY .labelBkg{background-color:rgba(232, 232, 232, 0.5);}#mermaid-svg-cvVe1wJNdXxK7voY .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#mermaid-svg-cvVe1wJNdXxK7voY .cluster text{fill:#333;}#mermaid-svg-cvVe1wJNdXxK7voY .cluster span{color:#333;}#mermaid-svg-cvVe1wJNdXxK7voY div.mermaidTooltip{position:absolute;text-align:center;max-width:200px;padding:2px;font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:12px;background:hsl(80, 100%, 96.2745098039%);border:1px solid #aaaa33;border-radius:2px;pointer-events:none;z-index:100;}#mermaid-svg-cvVe1wJNdXxK7voY .flowchartTitleText{text-anchor:middle;font-size:18px;fill:#333;}#mermaid-svg-cvVe1wJNdXxK7voY rect.text{fill:none;stroke-width:0;}#mermaid-svg-cvVe1wJNdXxK7voY .icon-shape,#mermaid-svg-cvVe1wJNdXxK7voY .image-shape{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-cvVe1wJNdXxK7voY .icon-shape p,#mermaid-svg-cvVe1wJNdXxK7voY .image-shape p{background-color:rgba(232,232,232, 0.8);padding:2px;}#mermaid-svg-cvVe1wJNdXxK7voY .icon-shape .label rect,#mermaid-svg-cvVe1wJNdXxK7voY .image-shape .label rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-cvVe1wJNdXxK7voY .label-icon{display:inline-block;height:1em;overflow:visible;vertical-align:-0.125em;}#mermaid-svg-cvVe1wJNdXxK7voY .node .label-icon path{fill:currentColor;stroke:revert;stroke-width:revert;}#mermaid-svg-cvVe1wJNdXxK7voY :root{--mermaid-font-family:"trebuchet ms",verdana,arial,sans-serif;} 是
否
新帧 I_t 到达
ViT 编码
(仅单帧)
π³ Decoder
帧内自注意力
全局注意力
Attn(Q_t, K̃,K_t, Ṽ,V_t)
解码头输出
Pose T_WC + PointMap
角度差 > τ?
加入关键帧集合
触发 Re-mapping
直接输出位姿
继续下一帧
完整双向注意力
更新 KV Cache
三、工程实现要点
| 特性 | 说明 |
|---|---|
| 基础模型 | π³(decoder-only Transformer) |
| 额外训练 | 不需要------直接适配预训练 π³ |
| 骨干网络 | ViT (Vision Transformer) |
| 输出 | 6-DoF 位姿 + 稠密点云 + 置信度图 |
| 关键帧管理 | 角度阈值自适应选择 |
| 帧率 | ~27 FPS(追踪阶段) |
核心设计哲学:不改模型权重,只改推理策略。这意味着 π³ 未来的精度提升可以直接"免费"继承。
四、实验分析
4.1 室内场景(TUM RGB-D)
| 方法 | ATE (m) ↓ | FPS |
|---|---|---|
| Point3R | 0.331 | 5 |
| CUT3R | 0.272 | 17 |
| TTT3R | 0.132 | 17 |
| KV-Tracker | 0.108 | 27 |
KV-Tracker 在精度和速度上同时最优。相比 TTT3R 精度提升 18%,速度提升 59%。
4.2 室内场景(7-Scenes)
| 方法 | ATE (m) ↓ | FPS |
|---|---|---|
| Point3R | 0.439 | 5 |
| CUT3R | 0.205 | 17 |
| TTT3R | 0.143 | 17 |
| KV-Tracker | 0.080 | 27 |
7-Scenes 上优势更明显------ATE 从 0.143m 降到 0.080m,降幅 44%。
4.3 手部物体追踪(ARCTIC)
| 方法 | ATE (m) ↓ |
|---|---|
| CUT3R | 0.305 |
| TTT3R | 0.303 |
| KV-Tracker@308 | 0.228 |
4.4 物体位姿估计(OnePose)
| 方法 | @5cm-5° 准确率 |
|---|---|
| OnePose | 84.1% |
| OnePose++ | 87.7% |
| KV-Tracker@518 | 92.9% |
在低纹理子集上表现更突出:OnePose++ 72.1% vs KV-Tracker 94.4%------说明 Transformer 的全局上下文理解在纹理稀疏时优势巨大。
4.5 运行时分析
KV-Cache 机制在 50 帧以内维持 ~30 FPS,而全注意力方案在 20 帧后即降至 <10 FPS,呈二次退化。
小结
KV-Tracker 的核心洞察是:多视图 Transformer 的全局注意力中,关键帧的 KV 表示一旦计算好就不需要反复重算。这个观察简单但效果惊人------不改权重、不加训练、仅改推理策略就获得 15× 加速。
三个值得关注的设计选择:
- 映射-追踪分离:映射时用完整双向注意力保证全局一致性(不漂移),追踪时用 KV-Cache 保证速度------这比 CUT3R/TTT3R 的纯因果方案在精度上显著更好
- 选 π³ 而非 DUSt3R:π³ 去掉了 camera register token,使得对参考视角的选择不敏感------这对关键帧变化时的鲁棒性至关重要
- 零训练适配:整个方法是纯推理时优化,意味着底层模型升级时可以无缝跟进
主要局限:内存需求随关键帧数线性增长,当前仅适用于空间受限的环境或物体。未来需要探索 KV-Cache 剪枝和压缩策略才能扩展到大规模 SLAM 场景。
这是一篇典型的"一个 trick 解决一个 real problem"的工作。KV-Cache 在 LLM 推理中早已广泛使用,KV-Tracker 把同样的思想迁移到视觉几何 Transformer------方法简单、效果显著、工程部署友好。
参考文献:M. Taher et al., "KV-Tracker: Real-Time Pose Tracking with Transformers," arXiv:2512.22581, 2025.