5.1.3. 针对Orbbec相机与ROS2的Fast DDS优化 --- OrbbecSDK V2 ROS2 封装 文档
使用默认配置时,Fast DDS表现出次优的传输效率,导致在ROS2中使用Orbbec相机时图像传输延迟显著。本文档提供了优化Fast DDS以提高图像传输效率的指导。
问题描述
通过有损的连接(通常为WiFi)传输时,容易导致IP分片丢失。此时,其余接受到的IP片段会被用来填充内核缓冲区。默认情况下,Linux内核会不断尝试重新合并这些分片的数据,30分钟后会超时。内核缓冲区默认大小为256KB,当这个缓冲区饱和时,就无法有新的片段进入,连接会进入待机模式
解决方法------ 调整系统参数+配置DDS
IP分片时间
-
路径 :
/proc/sys/net/ipv4/ipfrag_time(默认值:30秒) -
目的: 定义IP分片保留在内存中的持续时间。
-
调整: 减少此值以缩短未接收到分片的时间窗口,这有助于减少延迟。考虑到您环境的具体需求,因为此设置会影响所有传入的分片。
示例: 设置为3秒。
bashsudo sysctl net.ipv4.ipfrag_time=3
IP分片内存阈值
-
路径 :
/proc/sys/net/ipv4/ipfrag_high_thresh(默认值:262144字节) -
目的: 设置用于重组IP分片的最大内存。
-
调整: 增加此值以允许更多内存用于分片重组,这可以改善较大数据包的处理。
示例: 增加到128 MB。
bashsudo sysctl net.ipv4.ipfrag_high_thresh=134217728
最大缓冲区大小(最重要、最有效)
-
目的: 配置接收和发送数据的最大缓冲区大小,这对高吞吐量数据传输至关重要。
-
调整: 设置接收和发送操作的最大缓冲区大小。
命令:
bashsudo sysctl -w net.core.rmem_max=2147483647 sudo sysctl -w net.core.rmem_default=2147483647 sudo sysctl -w net.core.wmem_max=2147483647 sudo sysctl -w net.core.wmem_default=2147483647
或者,通过将这些设置添加到 /etc/sysctl.d/10-fastrtps-max.conf 文件中使其永久生效。
bash
sudo gedit /etc/sysctl.d/10-fastrtps-max.conf将以下行添加到文件中:
bash
net.core.rmem_max=2147483647
net.core.rmem_default=2147483647
net.core.wmem_max=2147483647
net.core.wmem_default=2147483647然后保存并退出文件
加载命令。
bash
sudo sysctl -p有关详细指导,请参考 ROS 2 DDS调优文档。
调整系统参数总结
bash
# 创建并编辑配置文件
sudo gedit /etc/sysctl.d/10-fastrtps-max.conf
# 写入下面的内容
net.ipv4.ipfrag_time=3
net.ipv4.ipfrag_high_thresh=134217728
net.core.rmem_max=2147483647
net.core.rmem_default=2147483647
net.core.wmem_max=2147483647
net.core.wmem_default=2147483647
# 加载此项配置
sudo sysctl -p配置DDS
bash
# 新建配置文件
sudo gedit ~/shm_fastdds.xml内容
XML
<?xml version="1.0" encoding="UTF-8"?>
<profiles xmlns="http://www.eprosima.com/XMLSchemas/fastRTPS_Profiles">
<transport_descriptors>
<transport_descriptor>
<transport_id>UDP_transport</transport_id>
<type>UDPv4</type>
<maxInitialPeersRange>10</maxInitialPeersRange>
<maxMessageSize>65000</maxMessageSize>
<sendBufferSize>1048576</sendBufferSize>
<receiveBufferSize>1048576</receiveBufferSize>
</transport_descriptor>
</transport_descriptors>
<participant profile_name="participant_profile_ros2" is_default_profile="true">
<rtps>
<name>profile_for_ros2_context</name>
<userTransports>
<transport_id>UDP_transport</transport_id>
</userTransports>
<useBuiltinTransports>false</useBuiltinTransports>
<sendSocketBufferSize>1048576</sendSocketBufferSize>
<listenSocketBufferSize>1048576</listenSocketBufferSize>
<builtin>
<initialPeersList>
<locator>
<udpv4>
<address>127.0.0.1</address>
</udpv4>
</locator>
</initialPeersList>
</builtin>
</rtps>
</participant>
<data_writer profile_name="default publisher profile" is_default_profile="true">
<qos>
<publishMode>
<kind>ASYNCHRONOUS</kind>
</publishMode>
<latencyBudget>
<duration>
<sec>0</sec>
<nanosec>1000000</nanosec>
</duration>
</latencyBudget>
</qos>
<historyMemoryPolicy>PREALLOCATED_WITH_REALLOC</historyMemoryPolicy>
</data_writer>
<data_reader profile_name="default subscription profile" is_default_profile="true">
<qos>
<data_sharing>
<kind>AUTOMATIC</kind>
</data_sharing>
<latencyBudget>
<duration>
<sec>0</sec>
<nanosec>1000000</nanosec>
</duration>
</latencyBudget>
</qos>
<historyMemoryPolicy>PREALLOCATED_WITH_REALLOC</historyMemoryPolicy>
</data_reader>
</profiles>环境变量
设置以下环境变量以使用自定义Fast DDS配置文件:
bash
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
export FASTRTPS_DEFAULT_PROFILES_FILE=$HOME/shm_fastdds.xml
export RMW_FASTRTPS_USE_QOS_FROM_XML=1此配置旨在优化数据流并减少传输延迟,提高Orbbec相机系统在ROS2环境中的响应性和可靠性。
基本概念
DDS(data distribution service ):数据分发服务
所有节点都可以在DataBus上发布和订阅消息。但它的先进之处在于,通信中包含了很多并行的通路,每个节点可以只关心自己感兴趣的消息,忽略不感兴趣的消息
-
discovery发现:发现网络内谁在发布消息、谁在订阅消息、彼此之间如何找到对方
-
serialization序列化:将数据编码为字节、将字节反编码为数据
-
transport传输层:序列化后的字节数据的传输形式
-
UDP:最常见、延迟低、适合局域网实时数据流、但不保证数据可靠(跨机器局域网通信)
-
TCP:更可靠,但时延、抖动更大(网络环境差、跨复杂网络)
-
SHM共享内存:同机进程间高效数据传输形式(同一台机器多个进程传大数据)
-
QoS通信质量策略:DDS最核心配置项,负责管理DDS通信的实际策略
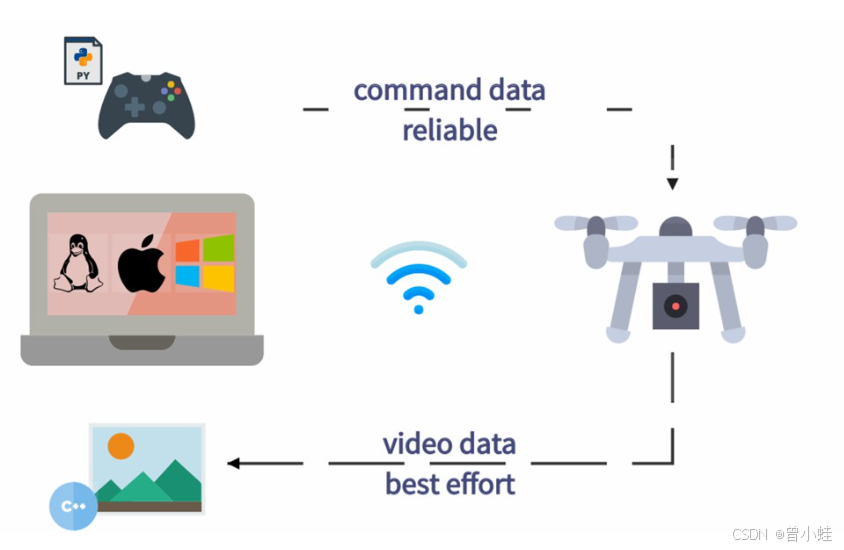
比如我们遥控一个无人机航拍,如果网络情况不好的话,遥控器向无人机发送运动指令的过程,可以用reliable通信模式,保证每一个命令都可以顺利发送给无人机,但是可能会有一些延时,无人机传输图像的过程可以用best effort模式,保证视频的流畅性,但是可能会有掉帧。
-
Reliability可靠性
-
Best Effort:尽力而为传输数据,不管数据是否丢失,不补也不等(图像、点云、高频传感器)
-
Reliable:尽量保证数据到达,需要确认、重传等机制(命令、关键状态、低频且不能丢弃的数据)
-
-
Durability持久性
-
Volatile:只关注当前网络中在线的发布者和订阅者
-
Transient Local:发布者会暂存最近消息,后来加入网络的订阅者也能拿到历史消息
-
-
History历史策略
-
Keep last N:只保留最近N条
-
Keep all:计量保存所有数据
-
-
Depth队列深度:配合History看,此项配置决定保存几条;如果太小,数据稍微抖动就会丢数据;如果太大,内存占用较大
-
Deadline:数据更新最大周期,即发布者至少多久给一次数据;订阅者至少多久收到一次数据,判断话题通信是否超时
-
Liveiness:节点存活检测
-
QoS兼容:发布者和订阅者的QoS策略必须匹配,否则通信失败
- 常见的数据流类型与其配置
|-------------|-------------------------------------------|
| 数据流类型 | 配置选项 |
| 传感器流 | best effor+keep last+小depth+优先低延迟 |
| 控制、命令、关键状态流 | reliable+较小depth+更重视确定性 |