前面一篇博客 ,介绍了如何在工作空间中,创建包,并在包中创建一个或多个可执行程序,程序里定义了单个或多个节点类对象,以便可执行程序运行起来的时候,类对象能够执行动作,干一些事情。那多个可执行程序运行起来时,他们之间靠什么来通讯呢,常规是走tcp/ip通讯、共享内存等其它,但在ROS2中,已定定义了一些现成的方式,封装好了三种标准通信方式:话题,服务,动作通讯。ROS2 把底层的 TCP/UDP/DDS/ 共享内存 全部封装起来,你只需要用话题、服务、动作 这三种高级方式通信,不需要关心网络底层。不用自己写了,简化了很多操作。
注:话题,服务,动作通讯其实是在填充节点对象的功能,后面的节点对象就不再像前面博客演示那样,只打印几句话而已。
一. 话题通讯
为了方便,博主这边就不再下命令去创建包了,直接复用上一篇博客的包,通过新增一个可执行程序方式去拓展。
- 新建一个topic_demo1_publisher_side.py文件,在里面实现话题的发布,代码如下:
python
# 导入rclpy库
import rclpy
from rclpy.node import Node
# 导入String字符串消息
from std_msgs.msg import String
# 创建一个继承于Node基类的子类
class Topic_Pub(Node):
def __init__(self, name):
super().__init__(name)
# 参数含义: 消息类型, "话题名", 消息队列长度
self.pub = self.create_publisher(String, "/topic_demo1", 1)
#self.create_timer(1.0, self.timer_callback)
#意思:每隔1秒执行一次timer_callback
self.timer = self.create_timer(1, self.pub_msg)
def pub_msg(self):
msg = String() # 创建一个String类型的变量msg
msg.data = "Hi,I publish a message." # 给msg里边的data赋值
self.pub.publish(msg) # 发布话题数据
# 主函数
def main():
rclpy.init() # 初始化
pub_demo = Topic_Pub("topic_publisher_node")
rclpy.spin(pub_demo)
pub_demo.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口- 再创建一个名为topic_demo1_subscriber_side.py的文件,在里面实现话题的订阅
python
#导入相关的库
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class Topic_Sub(Node):
def __init__(self,name):
super().__init__(name)
#self.create_subscription(
# msg_type, # 1. 消息类型(必须)
# topic, # 2. 话题名称(必须)
# callback, # 3. 收到消息后的回调函数(必须)
# qos_profile, # 4. 队列长度(必须)
# callback_group=None, # 5. 回调组(可选)
#)
# 4个必须参数(你写代码必写)
# msg_type 消息类型,如String、Image、LaserScan
# topic 话题名字字符串,如"my_topic"
# callback 收到消息后自动调用的函数
# qos_profile队列长度,一般写10
self.sub = self.create_subscription(String,"/topic_demo1",self.sub_callback,1)
def sub_callback(self,msg):
# print(msg.data,flush=True)
self.get_logger().info(msg.data)
def main():
rclpy.init()
sub_demo = Topic_Sub("topic_subscriber_node") # 创建对象并进行初始化
rclpy.spin(sub_demo)
sub_demo.destroy_node() #销毁节点对象
rclpy.shutdown() #关闭ROS2 Python接口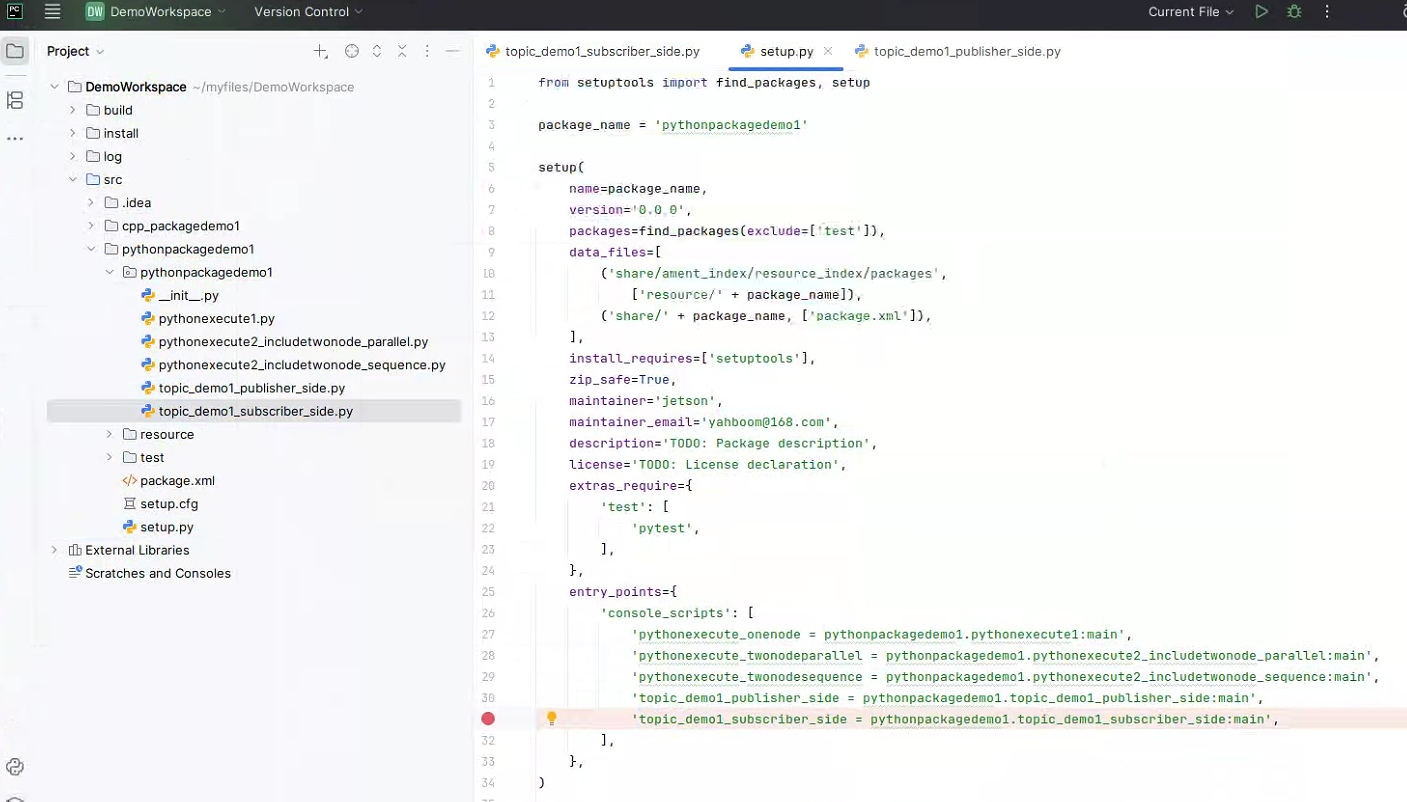
- 完毕后,编译功能包
- 接下来我们验证下是否设置成功,先运行含有发布话题的节点的可执行程序
python
ros2 run pythonpackagedemo1 topic_demo1_publisher_side注1: 如下语句可查下当前在可执行程序里,运行起来的节点(节点类对象)的名字
python
ros2 node list
注2: 我们还可以通过命令查看节点的信息
python
ros2 node info /topic_publisher_node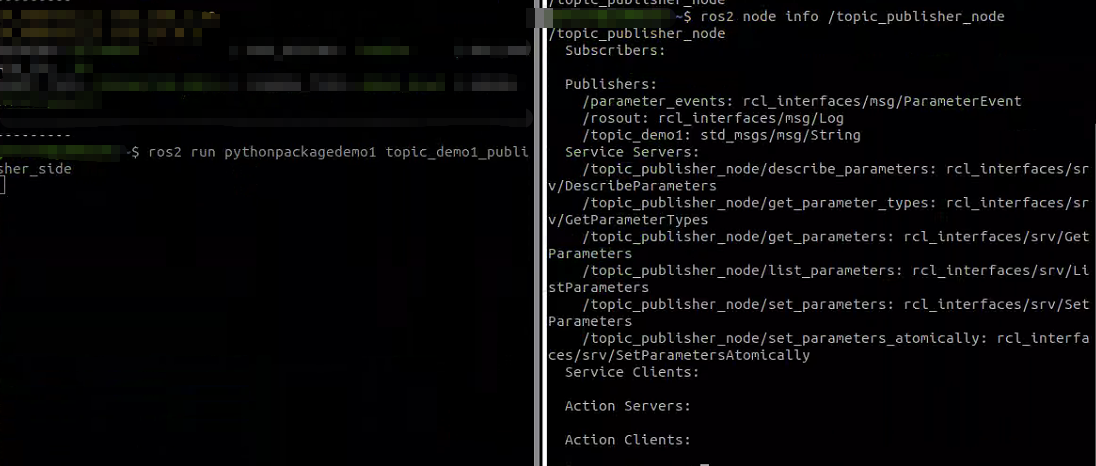
注3:若想看下当前发布的话题,可使用如下命令
python
ros2 topic list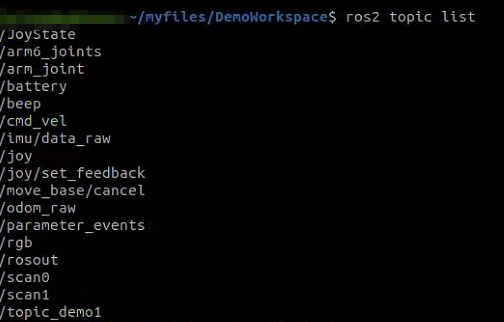
注4: 如果想看下话题发布的数据,可执行如下语句
python
ros2 topic echo /topic_demo1
注5:如果想看话题相关的信息,可执行如下语句
python
ros2 topic info /topic_demo1
- 再运行含有订阅话题的节点的可执行程序
python
ros2 run pythonpackagedemo1 topic_demo1_subscriber_side可看到订阅者能够正常收到发布者发布的信息了,且收到了发布者传过来的String类型参数
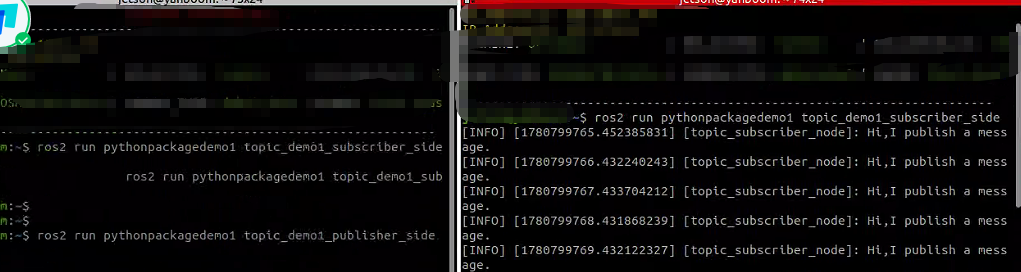
注:订阅者中有 对应的收到发布的话题数据后,要执行的函数。
二. 服务通讯
同样,直接复用之前创建的包,通过新增一个可执行程序方式去拓展。
- 新建一个service_demo1_server_side.py文件,在里面创建服务端,代码如下:
python
#导入相关的库文件
import rclpy
from rclpy.node import Node
from example_interfaces.srv import AddTwoInts
class Service_Server(Node):
def __init__(self,name):
super().__init__(name)
#作用是:注册一个服务,监听客户端的请求,并调用回调函数处理请求。
self.srv = self.create_service(AddTwoInts, '/add_two_ints', self.Add2Ints_callback)
#参数 作用
#AddTwoInts 服务接口类型(ROS2预定义的求和服务),常见的还有Setbool, Trigger, Empty, 后面讲自定义服务
#'/add_two_ints' 服务名称(客户端必须用这个名字才能找到服务),可自定义名字,必须以 / 开头,只能用 字母、数字、下划线 _,大小写敏感(/Add 和 /add 是两个不同服务)
#self.Add2Ints_callback 回调函数(收到请求后自动执行的处理逻辑)
def Add2Ints_callback(self,request,response):
response.sum = request.a + request.b
print("response.sum = ",response.sum)
return response
# ROS2规定服务回调函数必须有两个参数:
# request:客户端发来的请求数据(这里是两个整数a、b)
# response:服务端返回给客户端的响应数据(这里是求和结果sum)
# 函数最后必须return response。
# 话题 = 聊天、广播、持续发消息(单向)
# 服务 = 打电话、请求 - 响应、干完就挂(双向)
# 话题(Topic)= 大喇叭广播
# 老师拿着喇叭一直喊:"现在温度 25 度!现在速度 1m/s!"
# 学生们随便听,想听就听,不想听就不听
# 不用回复,老师只管喊
# 服务(Service)= 打电话
# 你打给朋友:"帮我算一下 3+5 等于几?"(请求)
# 朋友算完:"等于 8"(响应)
# 必须一问一答,打完电话就结束
# 特性 话题 (Topic) 服务 (Service)
# 通信模式 发布 → 订阅(单向) 请求 → 响应(双向)
# 是否需要回复 不需要 必须等待回复
# 使用场景 传感器数据、持续状态 执行任务、计算、开关
# 频率 高频(几十~几百 Hz) 低频(偶尔调用)
# 连接方式 多对多 一对一
# 阻塞 不阻塞 会阻塞(等结果)
# 只要是持续不断、实时传输的数据,都用话题:
# 摄像头图像
# 激光雷达数据
# 机器人位置、速度
# 温度、气压
# 遥控器指令
# 特点:只管发,不管对方收没收到。
# 只要是需要执行一个动作、需要结果、需要确认的,都用服务:
# 让机器人移动到某个点
# 计算两个数的和
# 打开 / 关闭传感器
# 保存一张图片
# 重置系统
# 查询机器人当前状态
# 特点:我叫你做,你必须做完告诉我结果。
# 最关键的区别:有没有响应
# 数据流用话题,任务调用用服务!
def main():
rclpy.init()
server_demo = Service_Server("service_server_node")
rclpy.spin(server_demo)
server_demo.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口- 再创建一个名为service_demo1_client_side.py的文件,在里面实现客户端
python
# 导入相关的库
import rclpy
from rclpy.node import Node
from example_interfaces.srv import AddTwoInts
# ROS2 天生支持:
# 一个服务端(Server) + 多个客户端(Client) 同时通信。
class Service_Client(Node):
def __init__(self, name):
super().__init__(name)
# 创建客户端:绑定服务名必须和服务端一模一样!
self.client = self.create_client(AddTwoInts, '/add_two_ints')
# 等待服务上线(防止服务没启动就调用)
while not self.client.wait_for_service(timeout_sec=1.0):
print("service not available, waiting again...")
# 创建请求对象
self.request = AddTwoInts.Request()
def send_request(self):
self.request.a = 10
self.request.b = 90
# 异步发送请求(非阻塞)
self.future = self.client.call_async(self.request)
print("等待服务端为我解惑....")
def main():
rclpy.init() # 节点初始化
service_client = Service_Client("service_client_node") # 创建对象
service_client.send_request() # 发送服务请求
while rclpy.ok():
rclpy.spin_once(service_client)
# 判断数据是否处理完成
if service_client.future.done():
try:
# 获得服务反馈的信息并且打印
response = service_client.future.result()
print("service_client.request.a = ", service_client.request.a)
print("service_client.request.b = ", service_client.request.b)
print("Result = ", response.sum)
except Exception as e:
service_client.get_logger().info('Service call failed %r' % (e,))
break
service_client.destroy_node()
rclpy.shutdown()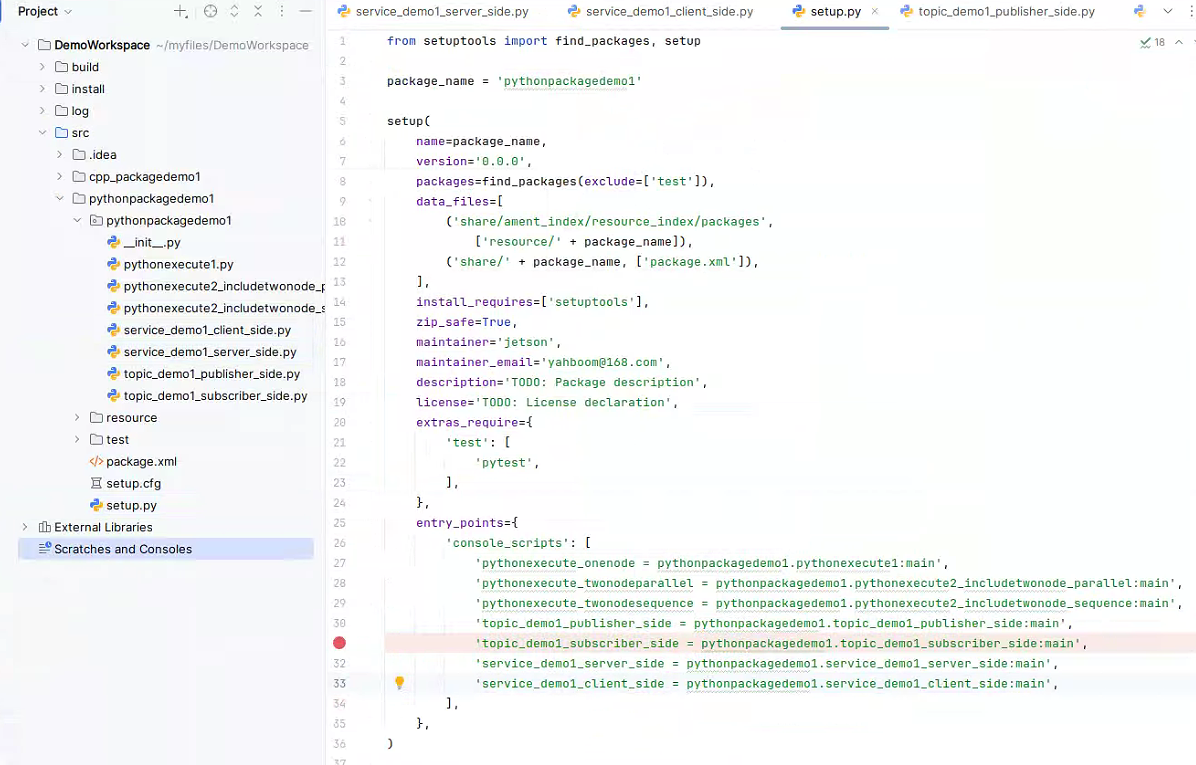
- 完毕后,编译功能包
python
colcon build
- 接下来我们验证下是否设置成功,先运行含有服务服务器端的节点的可执行程序
python
ros2 run pythonpackagedemo1 service_demo1_server_side注1:查看当前所有运行的服务
python
ros2 service list
注2:查看某个运行服务,所对应的服务类型
python
ros2 service type /add_two_ints
注3:查看服务类型的详细结构(请求 / 响应有哪些字段),如下是查看ROS2自带的服务类型,也可以查看自定义的服务类型,后面再说
python
ros2 interface show example_interfaces/srv/AddTwoInts
注4:直接用命令行调用服务(超级常用)

- 再运行客户端程序
python
ros2 run pythonpackagedemo1 service_demo1_client_side运行之后,可看到结果如下:

三. 动作通讯
开始之前,我们先回答下为什么要有动作,它和话题,服务的区别是什么?如下是三者的核心区别。
| 特性 | 话题 (Topic) | 服务 (Service) | 动作 (Action) |
|---|---|---|---|
| 通信方式 | 单向发布 | 双向请求 / 响应 | 双向:目标 + 反馈 + 结果 |
| 耗时长短 | 一直持续 | 极快(毫秒级) | 很慢(秒级 / 分钟级) |
| 能否取消 | 不能 | 不能 | 能中途取消 |
| 有无进度 | 无 | 无 | 有实时进度反馈 |
| 阻塞吗? | 不阻塞 | 会阻塞等待 | 不阻塞(后台运行) |
| 典型场景 | 摄像头、雷达、速度 | 开关、查询、计算 | 导航、机械臂移动、充电 |
可看到,针对不同的场景需要使用不同的方式。
- 我们首先要去自定义接口,这个要自己手动创建,必须先定义接口 (Goal/Feedback/Result 三部分),这是最关键的一步。这个要如创建C++类型包
python
ros2 pkg create --build-type ament_cmake action_interfaces_demo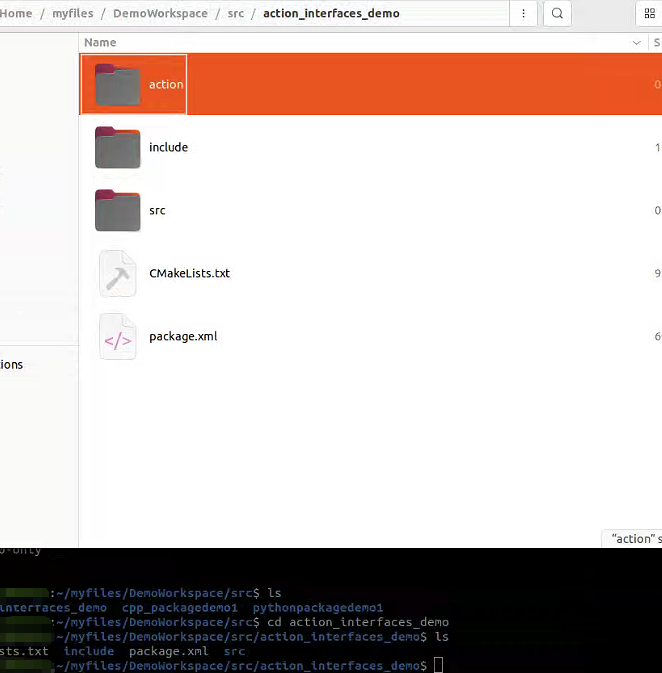
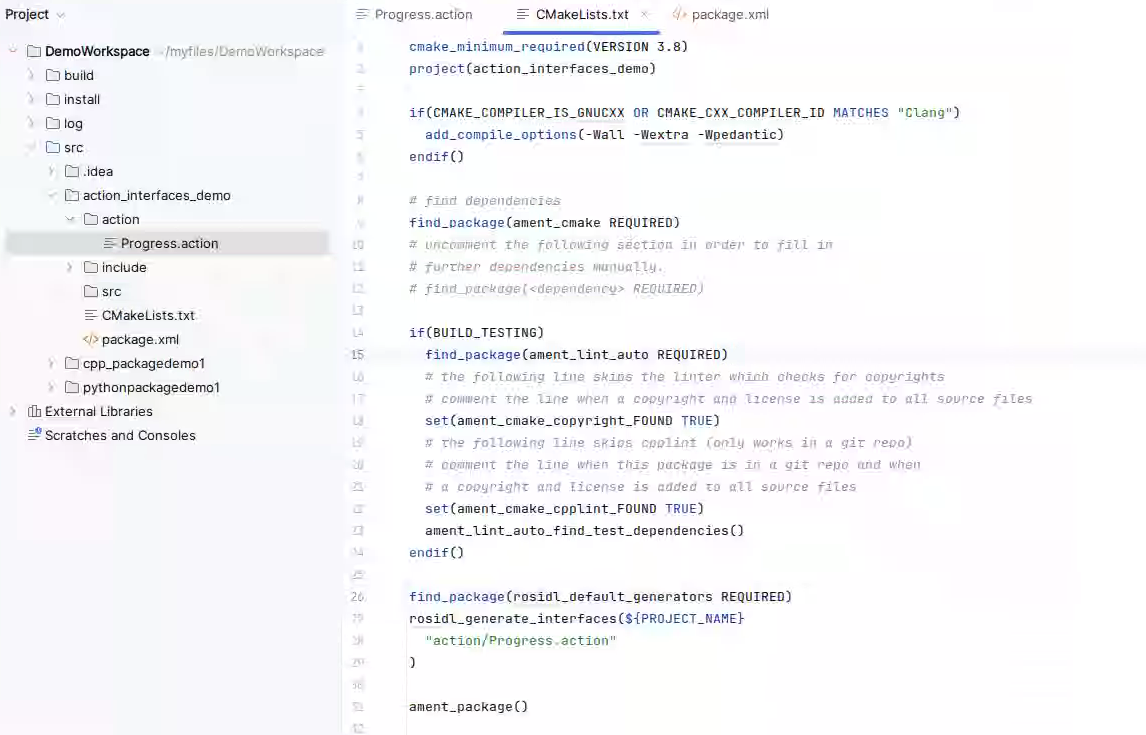
- 接着在这个文件夹下新建Progress.action的文件**(记得第一个字母大写)**,文件内容如下:
python
# 目标 (Goal):客户端发送
int64 mytarget
---
# 结果 (Result):服务端最后返回: 1~target中每个数值*2的值
int64[] myresult
---
# 反馈 (Feedback):服务端实时发送:比如target值为100,当前算到45,那么返回1~45各值*2的值
int64[] myfeedback- 在package.xml中需要添加一些依赖包,具体内容如下:
python
<buildtool_depend>rosidl_default_generators</buildtool_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<depend>action_msgs</depend>
<member_of_group>rosidl_interface_packages</member_of_group>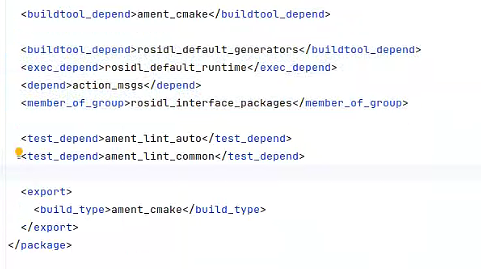
- 在CMakeLists.txt中添加如下配置
python
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"action/Progress.action"
)
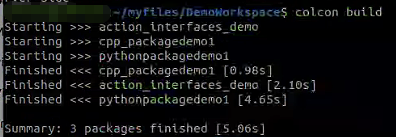
- 编译下包
python
colcon build 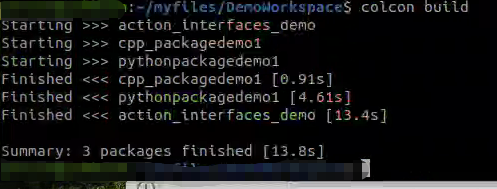
输入如下命令,可查看文件定义及编译是否正常
python
ros2 interface show action_interfaces_demo/action/Progress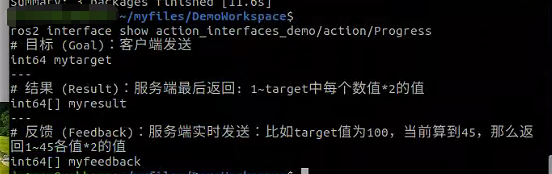
- 有了动作接口后,接下来编写动作服务端(使用python)。这边还是复用之前创建的包pythonpackagedemo1,新建一个action_demo1_server_side.py文件,在里面创建服务端,代码如下:
python
import rclpy
from rclpy.action import ActionServer
from rclpy.node import Node
import time
# 导入我们定义的动作接口
from action_interfaces_demo.action import Progress
class Action_Server(Node):
def __init__(self):
super().__init__('action_server')
# 创建动作服务端
self._action_server = ActionServer(
self, #当前节点
Progress, #动作接口类型,也就是前面你定义的action下的数据格式
'multicase', # 动作名称(客户端要对应),客户端必须用相同名字才能连上
self.execute_callback) #收到目标后自动调用这个函数
self.get_logger().info('动作服务端已启动,等待客户端请求...')
# 执行任务的回调函数(核心)
def execute_callback(self, goal_handle):
self.get_logger().info('开始执行任务...')
# 获取客户端发送的目标
target = goal_handle.request.mytarget #来自你定义的action中的变量名
sequence = []
# 循环生成数列(模拟长时间任务)
feedback_msg = Progress.Feedback()
for i in range(1, target):
sequence.append(i * 2)
self.get_logger().info(f'反馈:{sequence}')
feedback_msg.myfeedback = sequence
goal_handle.publish_feedback(feedback_msg)
# 模拟任务耗时
time.sleep(1)
# 任务完成
goal_handle.succeed()
result = Progress.Result()
result.myresult = sequence
self.get_logger().info(f'任务完成!结果:{sequence}')
return result
def main(args=None):
rclpy.init(args=args)
server = Action_Server()
rclpy.spin(server)
if __name__ == '__main__':
main()- 再创建一个名为action_demo1_client_side.py的文件,在里面实现客户端,代码如下
python
import rclpy
from rclpy.action import ActionClient
from rclpy.node import Node
from action_interfaces_demo.action import Progress
class Action_Client(Node):
def __init__(self):
super().__init__('action_client')
# 创建动作客户端
#参数如下:
# 当前节点
# 动作接口类型,也就是前面你定义的action下的数据格式
# 动作名称(和服务器端要对应),客户端必须用相同名字才能连上
self._action_client = ActionClient(self, Progress, 'multicase')
def send_goal(self, tatget):
# 发送目标
# 等待服务端上线
self._action_client.wait_for_server()
# 构造目标
goal_msg = Progress.Goal()
goal_msg.mytarget = tatget
# 异步发送目标
self._send_goal_future = self._action_client.send_goal_async(
goal_msg,
feedback_callback=self.feedback_callback # 绑定反馈回调
)
self._send_goal_future.add_done_callback(self.goal_response_callback)#当一个异步任务做完了,自动调用你指定的函数。
def goal_response_callback(self, future):
# 处理目标发送后的反馈; # 收到服务端响应(接受/拒绝目标)
goal_handle = future.result()
if not goal_handle.accepted:
self.get_logger().info('目标被拒绝!')
return
self.get_logger().info('目标已接受!')
self._goal_handle = goal_handle
# 等待最终结果
self._get_result_future = goal_handle.get_result_async()
self._get_result_future.add_done_callback(self.get_result_callback)
def feedback_callback(self, feedback_msg):
# 处理连续反馈; # 接收实时反馈
feedback = feedback_msg.feedback
self.get_logger().info(f'收到反馈:{feedback.myfeedback}')
def get_result_callback(self, future):
# 处理最终响应。 # 接收最终结果
result = future.result().result
self.get_logger().info(f'最终结果:{result.myresult}')
rclpy.shutdown()
def main(args=None):
rclpy.init(args=args)
client = Action_Client()
client.send_goal(10) #
rclpy.spin(client)
if __name__ == '__main__':
main()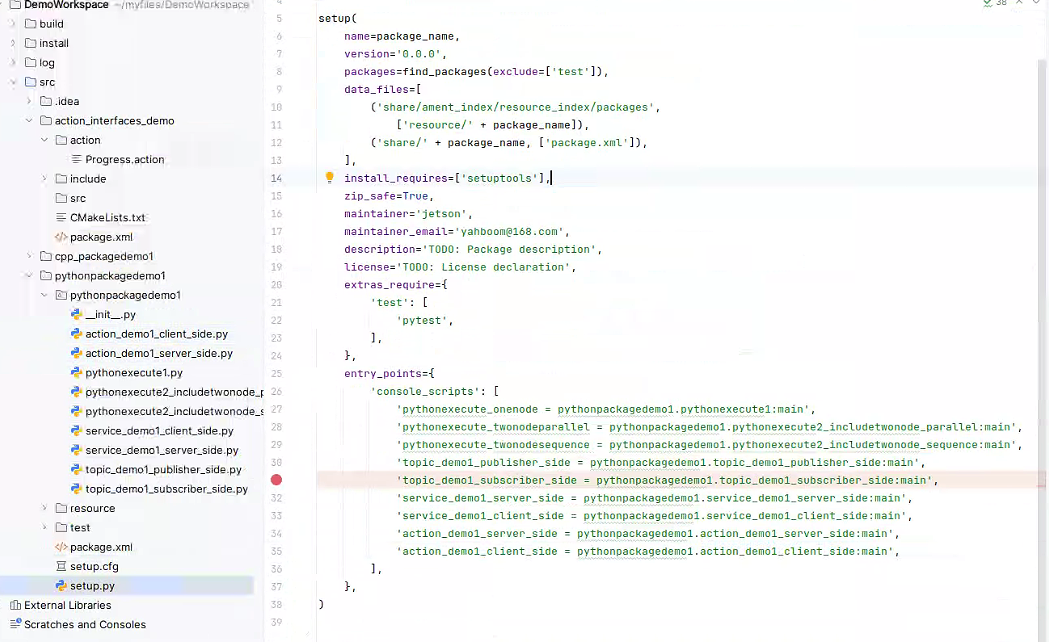
- 然后编译
- 接下来我们验证下是否设置成功,先运行动作服务器端程序
python
ros2 run pythonpackagedemo1 action_demo1_server_side注1:如下是一些常用的查询命令和命令行调用语句,这边就不再像前面话题,服务那样一一文字阐述了,直接截图
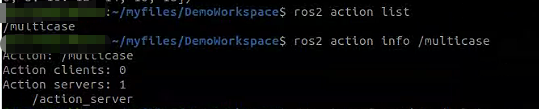
注2:如果想用命令行方式调用,则可使用如下格式语句
ros2 action send_goal 动作名 动作类型 "{参数}"
python
ros2 action send_goal /multicase action_interfaces_demo/action/Progress "{mytarget: 5}"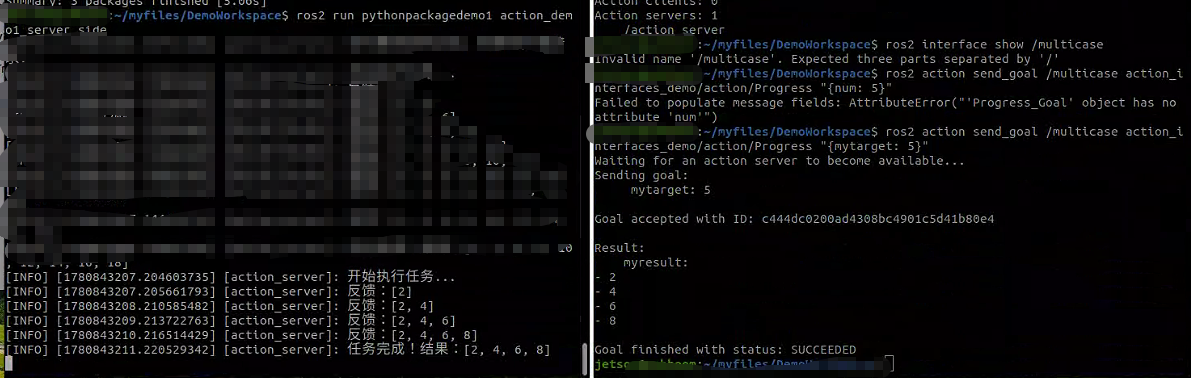
- 再运行客户端程序
python
ros2 run pythonpackagedemo1 action_demo1_client_side运行之后,可看到结果如下:
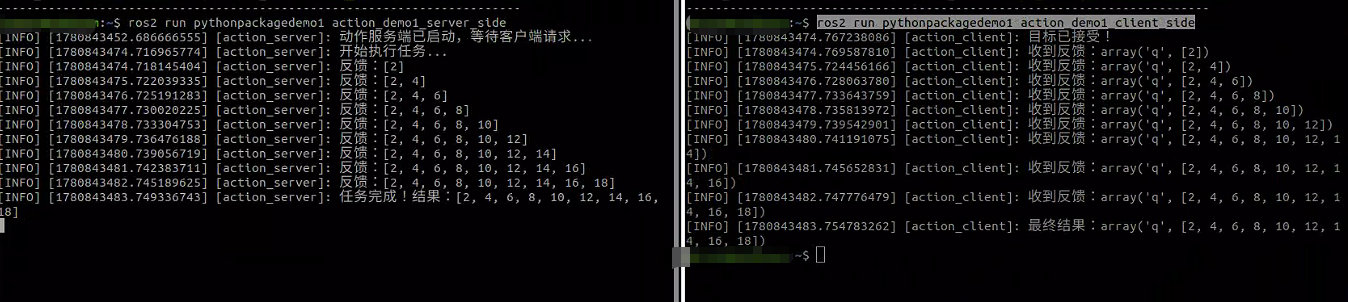
可看到如效果如自己所希望的,由于遍历每一个元素,且将元素值*2,(循环中加了睡眠时间),这个完整过程较为耗时,需要闭环,就像人一样事事有回响,中间不断地再反馈结果,直到结束。
下一篇博客我们再继续深入,此篇暂就到这儿。