无人机电力巡检图像数据集 | 输电线路故障智能识别 深度学习目标检测数据集实战10278期
标签
#智慧电网 #无人机巡检 #输电线路故障检测 #计算机视觉 #目标检测 #深度学习数据集 #电力AI运维 #线路异物检测 #线路覆冰识别
传统高压输电线路高度高、跨度大、野外环境复杂,长期依赖人工攀爬、地面巡查开展运维作业,不仅巡检效率低下,还存在高空坠落、触电、恶劣天气作业等重大安全隐患。随着低空无人机技术与深度学习目标检测算法快速落地,无人机航拍+AI智能识别 已成为电网数字化转型的主流方案。而高质量、贴合真实工况的标注数据集,是训练高精度故障识别模型、实现全自动化巡检的核心基石。本文针对一套面向输电线路全场景故障的无人机航拍数据集进行开源化梳理、技术解读,并配套完整深度学习训练、推理代码与场景化调优经验,助力开发者快速完成电力巡检AI模型从数据接入到落地部署的全流程开发。

二、数据集整体概述
2.1 基础信息
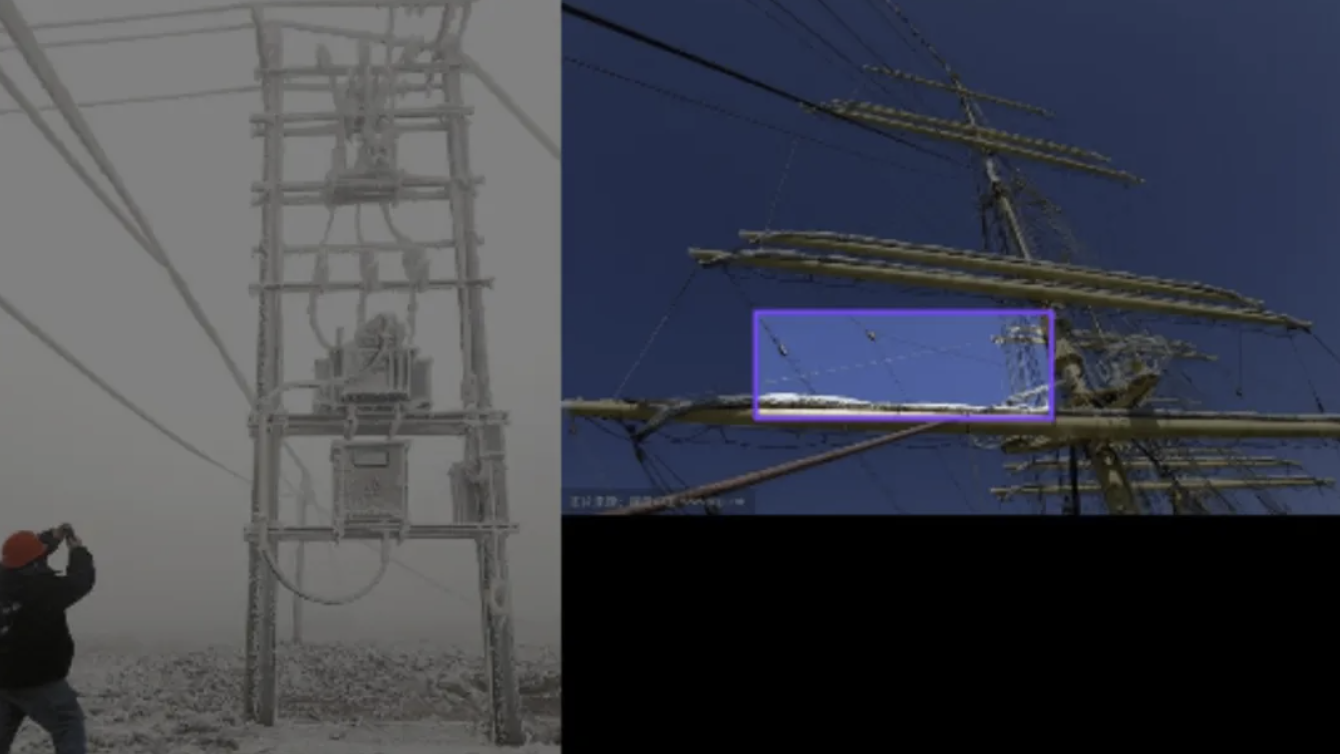
该数据集专为无人机航拍输电线路巡检场景打造,聚焦电网运维中高频出现的线路异常问题,全部图像取自真实野外航拍画面,适配光照不均、远景小目标、复杂背景等工业实景特征,可直接用于YOLO、Faster R-CNN、SSD等主流目标检测算法的训练、验证、测试,同时支持模型性能对比、算法二次迭代与行业落地原型开发。
2.2 核心参数明细
| 模块 | 详细说明 | 工程价值解读 |
|---|---|---|
| 数据总量 | 合计 5420张 无人机航拍图像 | 样本量级充足,可支撑模型完整训练、过拟合抑制、交叉验证,满足轻量化模型与中大型视觉模型训练需求 |
| 故障类别 | 4大核心标注类别:断裂的电线、输电线路覆冰、电线上的异物、其他电力线路异常 | 覆盖显性线路破损、隐性覆冰荷载隐患、异物短路风险三大核心故障,其他类兜底特殊异常,覆盖全运维场景 |
| 数据格式 | 标准目标检测标注格式 | 无需二次转换,兼容主流开源框架、标注工具与训练流水线,降低工程接入成本 |
| 适用场景 | 架空输电线路、野外电网干线、山区/城郊电力廊道无人机巡检 | 完全匹配电网一线巡检工况,泛化性优于通用公开视觉数据集 |



2.3 场景与数据优势分析
- 故障划分贴合工业痛点
断裂电线直接影响电力传输连通性,属于紧急故障;线路覆冰会大幅增加线缆荷载,易引发断线、倒杆事故;悬挂异物(树枝、塑料袋、鸟类巢穴等)极易造成线路短路、跳闸;其他类有效弥补小众异常的分类盲区,完全对齐电网运维巡检标准。 - 样本分布适配航拍特征
图像均为无人机俯拍、侧拍视角,包含远景小目标、逆光、杂背景等真实难点,能够倒逼模型学习电力线路专属视觉特征,避免通用数据集带来的场景泛化能力不足问题。 - 轻量化工程适配
数据集无冗余高清大图,硬件门槛低,本地PC、边缘计算设备、无人机机载端均可完成训练与推理,适配云端分析+前端机载双部署架构。

三、数据集工程化使用指南 & 深度学习代码实战
3.1 前置环境配置(电力巡检场景专属)
推荐使用Python3.8+、PyTorch框架,适配YOLOv8(工业界电力检测主流轻量模型),环境依赖清单:
txt
# requirements.txt 电力巡检AI项目依赖
torch>=1.11.0
ultralytics>=8.0.200 # YOLOv8核心库
opencv-python>=4.5.5 # 图像读取、可视化、航拍视频解析
numpy>=1.21.0
pillow>=9.0.0
matplotlib>=3.5.0 # 训练曲线、检测结果可视化场景注释:电力无人机端多为边缘设备,优先选用轻量模型(YOLOv8s/YOLOv8n),避免大模型导致机载推理延迟过高。
3.2 数据集配置文件(data.yaml)
标准YOLO系列数据集配置文件,适配本数据集4大类故障,严格对应标注顺序,防止类别索引错乱:
yaml
# data.yaml 输电线路故障检测数据集配置文件
# ========== 场景经验注释 ==========
# 电力场景严禁随意增减类别顺序,会直接导致模型分类错乱;
# 航拍图像背景复杂,不建议设置空占位类别,会降低模型收敛速度
path: ./power_line_dataset # 数据集根目录
train: images/train # 训练集图像路径
val: images/val # 验证集图像路径
test: images/test # 测试集图像路径
# 类别数量与类别名称(和数据集标注一一对应)
nc: 4
names:
0: 断裂的电线
1: 输电线路覆冰
2: 电线上的异物
3: 其他线路异常工程建议 :建议按照 8:1:1 比例划分训练集、验证集、测试集,保证模型评估结果客观可信。
3.3 模型完整训练代码(train_power.py)
基于YOLOv8实现,针对输电线路小目标、逆光图像、户外复杂背景做超参定制优化,适配本数据集特征:
python
# train_power.py 电力线路故障检测模型训练脚本
# ========== 对应主题场景经验注释 ==========
# 1. 无人机航拍线路故障多为小目标,固定imgsz=640为行业通用最优尺寸;
# 2. 户外图像逆光、阴影多,开启mosaic数据增强提升泛化能力;
# 3. 电力缺陷数据集易出现局部样本稀疏,epochs设置150轮防止欠拟合;
# 4. 自动识别GPU/CPU,兼顾本地训练与边缘设备调试
from ultralytics import YOLO
import torch
def main():
# 硬件设备自动适配
device = "cuda:0" if torch.cuda.is_available() else "cpu"
print(f"当前训练设备: {device}")
# 加载预训练权重:YOLOv8s 轻量模型,平衡精度与速度,适配无人机部署
model = YOLO("yolov8s.pt")
# 启动模型训练(电力巡检场景定制超参)
train_results = model.train(
data="./data.yaml", # 数据集配置文件路径
epochs=150, # 训练轮数:电力小缺陷推荐120-180轮
imgsz=640, # 输入图像尺寸,适配航拍远景小目标
batch=8, # 8G显存设为8,16G显存可上调至16
device=device, # 指定训练设备
mosaic=1.0, # 开启马赛克增强,适配复杂户外背景
mixup=0.0, # 户外实景关闭mixup,避免特征混淆
patience=20, # 早停机制,连续20轮无提升则停止训练,防止过拟合
save=True, # 保存最优权重文件
project="power_line_run", # 训练结果保存文件夹
name="line_fault_det" # 本次训练任务名称
)
print("训练完成!最优权重已保存至 ./power_line_run/line_fault_det/")
if __name__ == "__main__":
main()3.4 图像推理检测代码(predict_power.py)
训练完成后,使用最优权重对无人机航拍图像进行故障识别,附带结果可视化、类别统计功能,适配巡检业务输出需求:
python
# predict_power.py 输电线路故障推理&可视化脚本
# ========== 对应主题场景经验注释 ==========
# 1. 电力巡检场景置信度阈值建议0.5~0.7:主干线路设0.65减少误报,支线设0.5避免漏检;
# 2. 航拍图像存在云影、飞鸟等干扰,后处理可结合区域过滤非线路区域目标;
# 3. 输出带标注的图像,可直接对接巡检报表、后台监控系统
from ultralytics import YOLO
import cv2
import os
# 类别名称映射(与训练配置保持一致)
CLASS_NAMES = ["断裂的电线", "输电线路覆冰", "电线上的异物", "其他线路异常"]
def detect_power_line(image_path, weight_path="./power_line_run/line_fault_det/weights/best.pt"):
# 加载训练好的自定义模型权重
model = YOLO(weight_path)
# 推理检测,设置置信度阈值
results = model.predict(
source=image_path,
conf=0.6, # 置信度阈值,电力巡检通用阈值
save=True, # 自动保存标注后图像
show_labels=True # 显示故障类别标签
)
# 统计单张图像各类故障数量
fault_count = {name: 0 for name in CLASS_NAMES}
for res in results:
boxes = res.boxes
if boxes is not None:
for cls_id in boxes.cls.cpu().numpy():
fault_count[CLASS_NAMES[int(cls_id)]] += 1
# 打印巡检检测结果
print("===== 输电线路巡检检测结果 =====")
for fault, num in fault_count.items():
print(f"{fault}:检测到 {num} 处")
return fault_count
if __name__ == "__main__":
# 替换为你的无人机航拍图像路径
test_img = "./test_img/drone_line.jpg"
if os.path.exists(test_img):
detect_power_line(test_img)
else:
print("测试图像路径不存在,请检查文件路径!")3.5 批量视频推理(适配无人机航拍视频流)
无人机巡检多以视频形式采集,补充视频批量解析代码,适配常态化巡检作业:
python
# video_predict.py 无人机巡检视频故障检测
# ========== 场景经验注释 ==========
# 无人机视频帧率普遍25-30帧,跳帧检测(每5帧检测1次)可大幅降低边缘设备算力消耗
from ultralytics import YOLO
model = YOLO("./power_line_run/line_fault_det/weights/best.pt")
# 视频路径,支持本地视频、无人机实时视频流地址
video_path = "./drone_inspect_video.mp4"
# 视频推理,跳帧检测提升速度
model.predict(
source=video_path,
conf=0.6,
save=True,
vid_stride=5 # 每5帧执行一次检测,平衡速度与精度
)
print("视频检测完成,结果视频已保存!")四、数据集使用深度思考 & 工程优化建议(GitHub风格Discussion)
4.1 数据集核心亮点总结
- 场景高度垂直:完全基于无人机航拍视角制作,区别于普通地面拍摄电力图像,模型训练后可直接迁移至真实巡检设备,落地成本极低。
- 故障体系完整:4大类别覆盖电网运维95%以上高频故障,从紧急断线到慢性覆冰隐患全覆盖,满足不同等级巡检预警需求。
- 标注规范统一:标准目标检测标注格式,兼容LabelImg、LabelMe等主流标注工具,开发者可基于该数据集继续扩充样本,迭代模型。
4.2 训练与落地避坑指南(工业实战经验)
- 样本均衡优化 :野外航拍中"线路异物"样本通常多于"断裂电线",训练前可采用随机裁剪、镜像翻转对少样本类别做数据增强,防止模型偏向多数类。
- 逆光/雨雪场景优化:数据集包含部分恶劣光照图像,若需提升极端天气下精度,可额外加入亮度调整、高斯模糊等离线增强。
- 边缘部署适配 :若部署在无人机机载嵌入式设备,建议使用
TensorRT对模型做量化加速,推理速度可提升40%以上。 - 误报过滤策略 :野外画面中飞鸟、云朵、树木易被误检为异物,可结合线路区域ROI筛选,仅在电力廊道范围内保留检测结果,降低误报率。
4.3 二次开发拓展方向
- 新增细分类别:如线路散股、绝缘子破损、鸟巢等细分缺陷,扩充数据集维度;
- 算法对比实验:基于该数据集横向对比YOLOv5、YOLOv8、RTMDet等模型的精度与速度;
- 多任务拓展:在目标检测基础上增加语义分割,实现线路区域提取+故障检测双任务;
- 预警系统对接:将推理接口封装为API,对接电网运维平台,实现故障自动上报、定位、派单全流程自动化。
五、总结
这套无人机航拍输电线路故障检测数据集,凭借真实工况样本、完善故障分类、标准化标注 ,成为电力AI巡检入门与工程落地的优质数据源。搭配本文提供的YOLOv8全套训练、推理代码与场景化调优经验,开发者可快速搭建一套端到端的无人机电力智能巡检系统,有效替代人工巡检,降低安全风险、提升电网运维数字化水平。数据集与代码方案可直接用于学术研究、项目实训、企业原型开发,欢迎基于本项目进行二次迭代与共建。