
🎬 渡水无言 :个人主页渡水无言
❄专栏传送门 : 《linux专栏》《嵌入式linux驱动开发》《linux系统移植专栏》
❄专栏传送门 : 《freertos专栏》 《STM32 HAL库专栏》《linux裸机开发专栏》
❄专栏传送门 :《产品测评专栏》 《Ai智能体专栏) 《ROS开发专栏》
⭐️流水不争先,争的是滔滔不绝
📚博主简介:第二十届中国研究生电子设计竞赛全国二等奖 |国家奖学金 | 省级三好学生
| 省级优秀毕业生获得者 | csdn新星杯TOP1 | 半导纵横专栏博主 | 211在读研究生
在这里主要分享自己学习的linux嵌入式领域知识;有分享错误或者不足的地方欢迎大佬指导,也欢迎各位大佬互相三连

目录
[1.1、 ROS2里的机械臂消息包格式](#1.1、 ROS2里的机械臂消息包格式)
[2.1、新建机械臂功能包 mani_pkg](#2.1、新建机械臂功能包 mani_pkg)
[2.3、配置 CMakeLists.txt](#2.3、配置 CMakeLists.txt)
[2.4、配置 package.xml](#2.4、配置 package.xml)
前言
在机器人开发中,机械臂是实现抓取、搬运、操作任务的核心执行机构。ROS2 提供了标准的关节状态消息格式,可以快速实现机械臂各关节角度、位置控制。
本期博客我们从零实现机械臂基础控制, 掌握 JointState 消息格式、发布机械臂控制话题,让仿真机械臂在折叠姿态与展开姿态之间循环往复运动,为后续视觉物品抓取打下基础。
一、实验原理
1.1、 ROS2里的机械臂消息包格式
在ROS2中,用于描述机械臂状态的消息格式为:
cpp
sensor_msgs::JointState在官方Wiki页面,对它的格式定义,如下图所示:
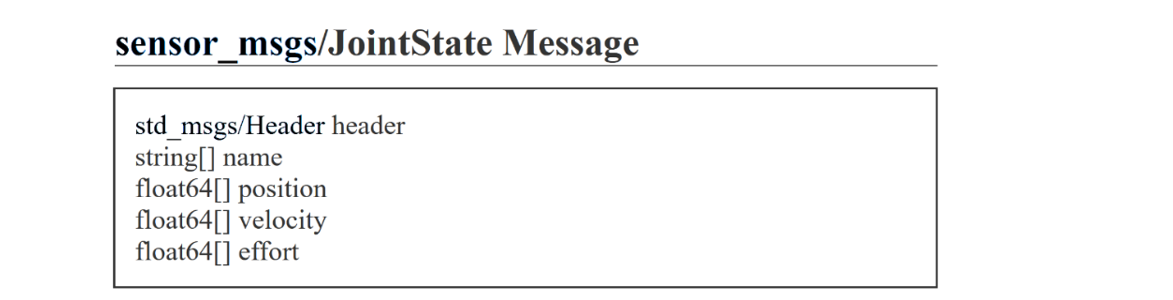
具体含义如下:
std_msgs/Header header:消息时间戳、坐标系。
string\[\] name:关节名称数组。
float64\[\] position:关节位置数组。
float64\[\] velocity:关节速度数组。
float64\[\] effort:关节力矩数组。
上述的后四个成员都是数组,通常每个数组都包含相同个数的成员,这样可以保持一一对应的关系。比如name0的关节,它对应角度是position0,对应速度是velocity0,以此类推。如果某个项目没有数值,比如effort,可以让这个数组的成员个数为零。
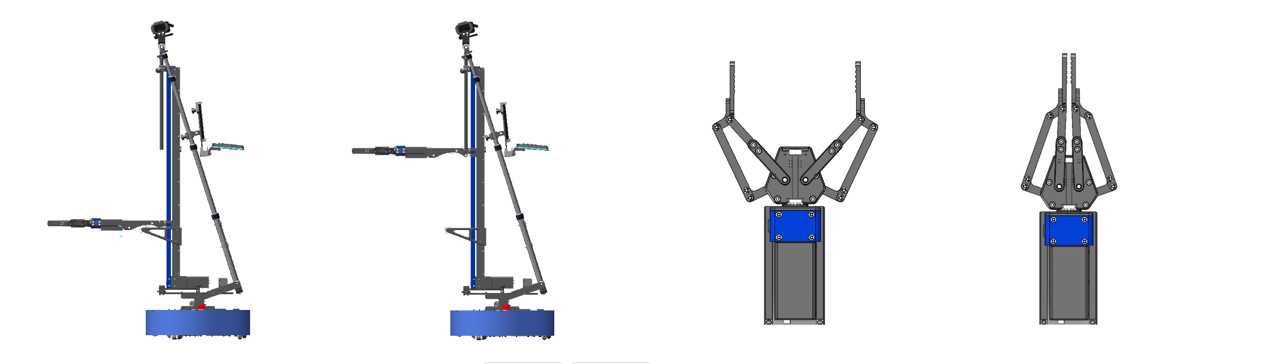
1.2、机械臂控制
机器人的手臂,只需要两个关节控制量。一个是机械臂基座的升降高度,另一个就是手爪的指间宽度。如下所示,对应sensor_msgs::JointState消息包成员:
lift:机械臂基座升降高度(单位:m)。
gripper:手爪两指开合间距(单位:m)。
1.3、控制话题
机械臂控制发布话题:
cpp
/wpb_home/mani_ctrl只要向该话题发布 JointState 消息,即可控制 Gazebo 中机械臂运动。
二、编写机械臂控制程序
2.1、新建机械臂功能包 mani_pkg
进入工作空间 src 目录,创建专用功能包,打开终端,输入以下命令:
cpp
cd ~/ros2_ws/src
ros2 pkg create mani_pkg2.2、编写机械臂控制源码
在 mani_pkg/src 新建 mani_ctrl.cpp,完整代码如下所示:
cpp
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/joint_state.hpp"
std::shared_ptr<rclcpp::Node> node;
int main(int argc, char * argv[])
{
// 初始化ROS2
rclcpp::init(argc, argv);
// 创建节点
node = std::make_shared<rclcpp::Node>("mani_ctrl_node");
// 创建发布器,发布机械臂控制话题
auto mani_pub = node->create_publisher<sensor_msgs::msg::JointState>(
"/wpb_home/mani_ctrl",
10
);
// 定义关节消息
sensor_msgs::msg::JointState mani_msg;
// 设置2个关节
mani_msg.name.resize(2);
mani_msg.name[0] = "lift"; // 机械臂升降关节
mani_msg.name[1] = "gripper"; // 夹爪开合关节
mani_msg.position.resize(2);
// 设置循环频率 0.1Hz
rclcpp::Rate loop_rate(0.1);
while (rclcpp::ok())
{
// 姿态1:机械臂折叠,夹爪微张
RCLCPP_WARN(node->get_logger(), "Pose 1: 机械臂折叠");
mani_msg.position[0] = 0.0;
mani_msg.position[1] = 0.01;
mani_pub->publish(mani_msg);
loop_rate.sleep();
// 姿态2:机械臂升起展开,夹爪张开
RCLCPP_WARN(node->get_logger(), "Pose 2: 机械臂升起展开");
mani_msg.position[0] = 1.0;
mani_msg.position[1] = 0.1;
mani_pub->publish(mani_msg);
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}创建 JointState 消息,绑定 lift、gripper 两个关节;
循环切换两组位置参数;
定时发布控制指令,让机械臂往复运动。
2.3、配置 CMakeLists.txt
打开 CMakeLists.txt,追加节点编译配置,全部代码如下:
cpp
cmake_minimum_required(VERSION 3.8)
project(mani_pkg)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
# 编译可执行文件
add_executable(mani_ctrl src/mani_ctrl.cpp)
ament_target_dependencies(mani_ctrl
rclcpp
sensor_msgs
)
# 安装节点
install(TARGETS
mani_ctrl
DESTINATION lib/${PROJECT_NAME}
)
ament_package()2.4、配置 package.xml
新增机械臂控制的相关依赖,全部代码如下:
cpp
<?xml version="1.0"?>
<package format="3">
<name>mani_pkg</name>
<version>0.0.0</version>
<description>ROS2机械臂基础控制功能包</description>
<maintainer email="robot@todo.com">robot</maintainer>
<license>Apache-2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>sensor_msgs</depend>
</package>三、编译与仿真运行
3.1、编译功能包
打开终端,输入以下指令:
cpp
cd ~/ros2_zice
colcon build --packages-select mani_pkg --parallel-workers 1
colcon build --packages-select wpr_simulation2 --parallel-workers 1
source install/setup.bash3.2、运行过程
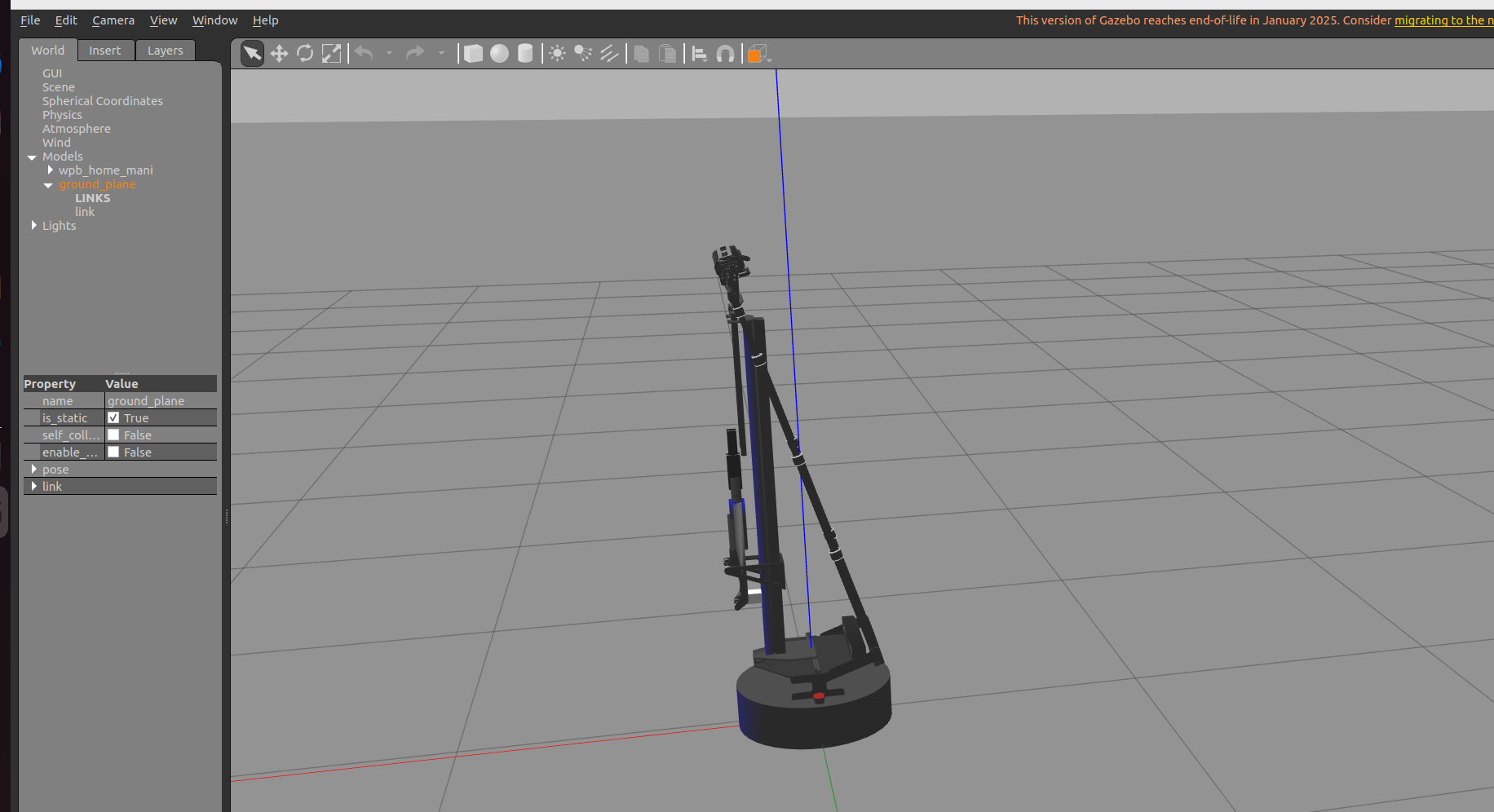
启动Gazebo仿真环境
启动 Gazebo,加载机器人与机械臂模型。打开终端,输入以下指令:
cpp
cd ~/ros2_zice
source install/setup.bash
ros2 launch wpr_simulation2 wpb_mani.launch.py如下图所示:
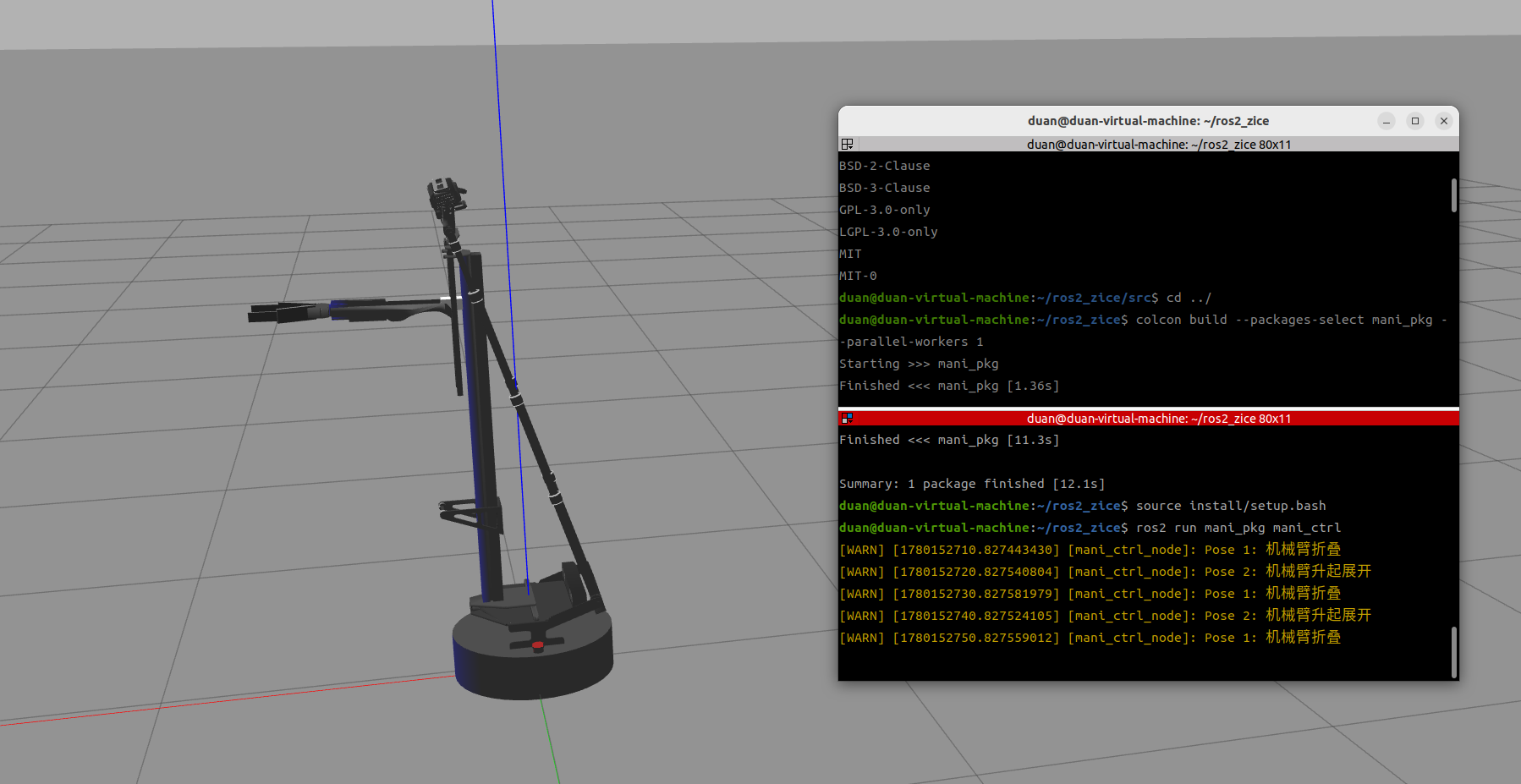
运行机械臂控制节点
新开终端,输入以下指令:
cpp
cd ~/ros2_zice
source install/setup.bash
ros2 run mani_pkg mani_ctrl节点运行后,终端循环打印两种姿态提示信息,同时 Gazebo 仿真窗口中可以清晰观察到机械臂运动规律:机械臂首先保持折叠收拢状态,手爪小幅张开;间隔一段时间后机械臂缓缓抬升、向前完全展开,手爪张开幅度变大;随后自动回落恢复折叠姿态,如此循环往复。如下图所示:
总结
本期实验实现了机械臂两种姿态自动循环切换。