前言
上期第9期,我们梳理了遥感解译三代技术进化逻辑:人工目视特征→机器学习人工构造特征→深度学习CNN自动特征,同时分清了分类、检测、分割三大遥感AI任务。
绝大多数新手卡在核心盲区:深度学习凭什么不用人工画特征,就能自动看懂卫星图?
答案全部依托卷积神经网络CNN------它是所有YOLO、U-Net、SegFormer、MobileNet遥感模型的底层骨架,是AI遥感的基石核心。
市面上CNN教程堆满微积分、卷积公式,晦涩难懂不贴合遥感场景。本期全程无复杂数学公式、全可视化通俗讲解,拆解卷积、池化、激活三大核心模块,深度解答:CNN如何自主读懂遥感边缘、纹理、光谱地物特征,同时点明遥感专属训练痛点、新手套用通用图像模型的致命误区,搭配可直接运行遥感专属CNN入门代码,零基础完全吃透。
一、CNN三大核心模块通俗拆解
完整卷积神经网络标准链路:输入遥感影像 → 卷积层 → 激活函数 → 池化层 → 多层堆叠 → 输出特征/分类结果
三大模块各司其职,模拟人眼观察卫星影像的思考逻辑。
1.1 卷积层:局部扫描,提取地物基础特征
通俗定义:用固定大小滑动卷积核(感知窗口),逐像素扫过整张遥感影像,抓取局部像素关联信息,替代人工提取特征。
通俗类比:人眼聚焦细看一小块卫星图,分辨建筑棱角、河道边线、植被颗粒。
遥感专属作用:
-
浅层卷积:捕捉水体边线、道路轮廓、建筑墙角边缘特征
-
中层卷积:捕捉林地斑驳、耕地田垄、屋顶排布纹理特征
-
深层卷积:融合波段像素差值,识别水体、裸土、植被光谱语义特征
核心优势:权值共享、局部感知,不用逐像素学习参数,大幅降低卫星大图运算算力压力。
1.2 激活函数:赋予网络非线性判别能力
通俗定义:给网络增加判断能力,区分复杂混合地物,过滤无效像素噪声。
遥感痛点解读 :遥感存在大量混合像元、云雾过渡像素,纯线性计算无法区分水体阴影VS真实水体,激活函数即可完成差异化判别。
遥感全网通用选型:ReLU
剔除负值干扰像素,收敛速度快,适配多波段遥感影像,几乎所有遥感分割/检测模型默认激活函数。
1.3 池化层:降参降噪,缩小影像尺寸
通俗定义:压缩特征图尺寸,保留核心地物特征,剔除细碎噪声像素,减少显存占用。
遥感适配作用:
-
弱化云雾细碎噪点、航拍杂点干扰
-
降低高分辨率遥感大图参数体量,防止模型过拟合
-
赋予模型平移不变性:同一块建筑,偏移位置依旧可以精准识别
常用类型:最大池化(遥感首选,保留地物强光轮廓特征)、平均池化(适配植被均质区域提取)
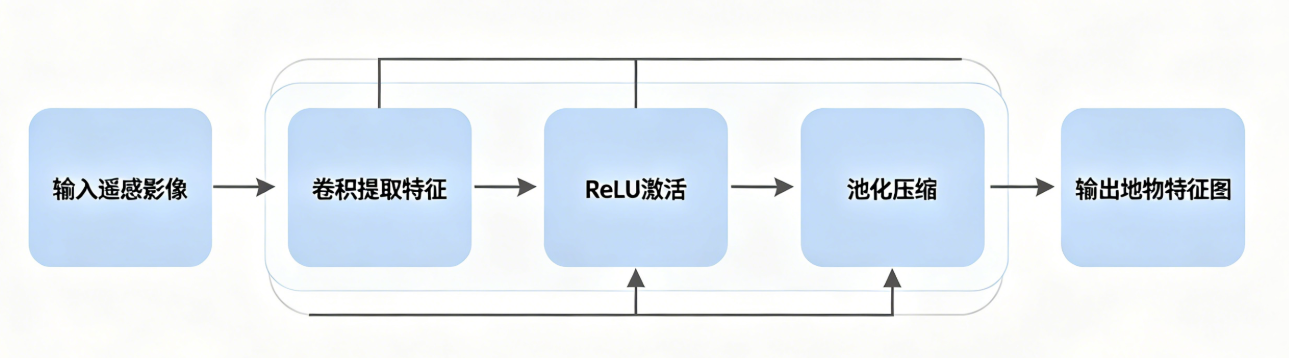 CNN完整结构通俗图解
CNN完整结构通俗图解
二、CNN全自动提取遥感特征全流程
区别于机器学习人工勾取光谱、纹理特征,CNN层级式自主提取,完全复刻专业人员目视解译逻辑,也是AI解译效率碾压人工的核心原因。
层级特征提取链路
第一层网络:底层视觉特征
抓取:地物边缘、轮廓线条、波段明暗色差
示例:河道边界、道路边线、建筑外框
第二层网络:中层结构特征
抓取:局部纹理、组团结构、邻域像素关系
示例:林地颗粒纹理、农田条状田块、连片居民区肌理
第三层深层网络:高层语义特征
抓取:融合光谱+空间特征,读懂地物类别属性
示例:自动区分深色水体VS深色山体阴影、区分裸土VS老旧屋顶
核心总结
机器学习:人告诉模型「什么是水体纹理」;
CNN深度学习:模型看图自学「水体专属纹理+光谱规律」。

CNN遥感层级特征提取可视化图
三、遥感专属CNN训练:独有特点+行业难点
遥感影像≠日常手机风景图,直接套用通用训练逻辑,模型精度永久受限,本节为科研毕设高频考点。
3.1 遥感影像CNN训练四大独有特点
-
波段维度特殊:普通图像固定RGB三波段;遥感包含4/6/10+多光谱波段,额外承载植被、水体指数信息
-
尺度极端多变:同一影像同时存在微米级小路、连片万亩林地,大小地物跨度极大
-
像素关联性极强:地物连片分布,耕地、建筑连通性高,不能割裂像素单独训练
-
对地几何敏感:角度、高程、阴影会改变地物外观,模型需要抗几何干扰能力
3.2 目前遥感CNN训练四大硬核难点
-
同谱异物、同物异谱难区分:阴影与水体色调一致,CNN极易混分
-
小目标极易丢失:光伏板、小型厂房、乡间小路经过池化压缩后特征消失
-
云雾噪声干扰不可逆:大气残留云雾会扰乱卷积波段取值,造成全域错分
-
标注成本极高:高质量像素级遥感标签远贵于日常图像标注,小样本场景泛化极差
四、新手高频踩坑:直接套用通用ImageNet模型做遥感解译
90%遥感新手入门第一个大坑:下载ResNet/MobileNet通用预训练权重,直接灌入卫星影像训练,最终Kappa精度低于0.5、地物大面积混分。
4.1 普通图像VS遥感图像核心差异对比
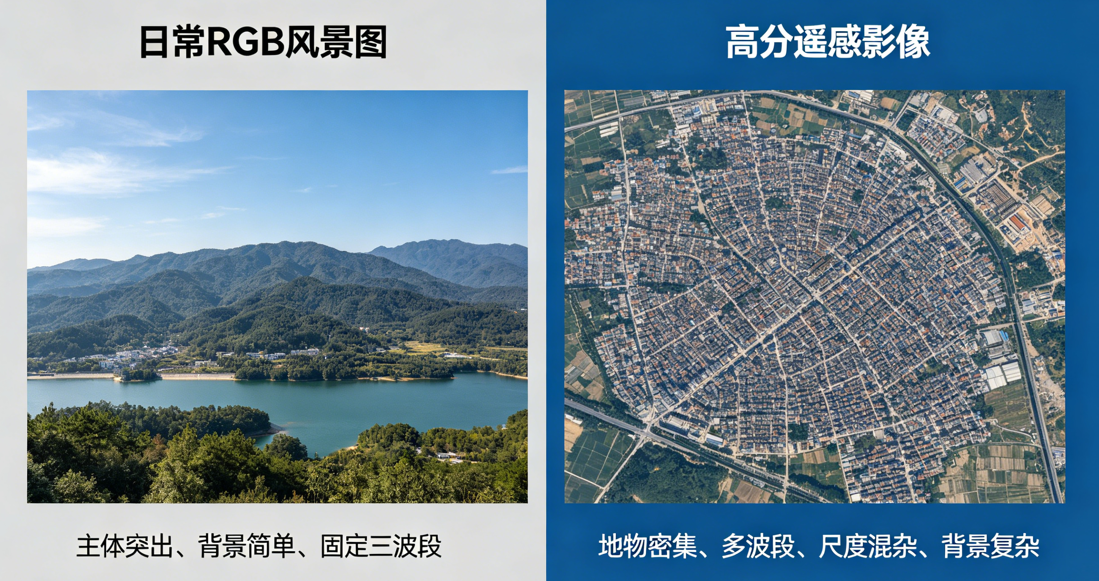
普通图像&遥感图像模型适配对比图
左右双栏对比布局:左栏日常RGB风景图(主体突出、背景简单、固定三波段);右栏高分遥感影像(地物密集、多波段、尺度混杂、背景复杂),标注模型适配差异、训练优缺点。
4.2 直接通用迁移学习的四大致命问题
-
波段维度不匹配:通用模型适配3通道RGB,遥感多光谱4通道及以上,输入维度报错、权重失效
-
特征逻辑完全不同:通用模型学习人脸、花草全局特征;遥感依靠局部纹理、波段差值判别地物,特征逻辑相悖
-
尺度感知不兼容:通用模型适配大主体目标;遥感细碎小目标居多,池化层极易丢失关键特征
-
光照视角逻辑不符:手机图像光照多变;遥感卫星固定俯视角,光影规律完全不同
4.3 行业标准解决办法
摒弃原生ImageNet权重,使用遥感预训练权重(BigEarthNet、SEN12遥感数据集预训练),修改网络首层卷积通道,适配多波段遥感影像输入。
五、遥感极简CNN可运行代码(适配多波段、新手专用)
适配tif多波段遥感切片,修改首层卷积通道,规避通用模型波段bug,复制即可运行,自带注释。
python
# 遥感专属轻量化CNN网络|适配3/4波段遥感影像
# 修复新手通用模型波段不匹配、特征提取失效问题
import torch
import torch.nn as nn
import torch.nn.functional as F
class RemoteSensingCNN(nn.Module):
def __init__(self, in_channels=4, num_classes=5):
"""
:param in_channels: 输入波段数,RGB填3,多光谱哨兵/高分填4
:param num_classes: 地物分类类别:水体/建筑/植被/道路/耕地=5类
"""
super().__init__()
# 遥感专属首层卷积:适配多波段输入(通用模型无法修改此处)
self.conv1 = nn.Conv2d(in_channels, 32, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
self.conv3 = nn.Conv2d(64, 128, kernel_size=3, padding=1)
# 池化降噪,适配遥感细碎噪点
self.pool = nn.MaxPool2d(2,2)
self.relu = nn.ReLU()
# 分类全连接层
self.fc1 = nn.Linear(128*64*64, 256)
self.fc2 = nn.Linear(256, num_classes)
def forward(self, x):
# 层级特征提取:边缘→纹理→语义
x = self.pool(self.relu(self.conv1(x)))
x = self.pool(self.relu(self.conv2(x)))
x = self.pool(self.relu(self.conv3(x)))
x = torch.flatten(x,1)
x = self.relu(self.fc1(x))
out = self.fc2(x)
return out
# 模型测试调用
if __name__ == "__main__":
# 模拟4波段512*512遥感切片输入
rs_img = torch.randn(1,4,512,512)
model = RemoteSensingCNN(in_channels=4,num_classes=5)
result = model(rs_img)
print("✅ 遥感CNN前向推理完成,输出地物分类结果:",result.shape)✅ 本期全文核心总结
-
CNN三大核心:卷积抓特征、激活辨差异、池化降噪声,全程无人工特征绘制
-
CNN层级逻辑:浅层抓边缘、中层抓纹理、深层读懂光谱地物语义
-
遥感影像区别日常图像:多波段、小目标密集、同谱异物干扰强,训练难度更高
-
入门最大误区:直接套用RGB通用预训练模型,务必修改输入通道、选用遥感预训练权重
📌 下期预告
遥感数据增强进阶:适配俯拍影像的专属增强策略,拒绝普通翻转失效,解决遥感样本不足、模型过拟合痛点!