AP-03 SOME/IP协议实战 - AUTOSAR自适应平台通信中间件深度解析
AP-03 SOME/IP协议实战 - AUTOSAR自适应平台通信中间件深度解析
一、SOME/IP协议概述
1.1 什么是SOME/IP
SOME/IP (Scalable service-Oriented Middleware over IP)是一种面向服务的IP中间件协议,最初由BMW集团开发,后来被纳入AUTOSAR标准,成为汽车以太网通信的核心协议之一。
1.2 为什么需要SOME/IP
- 面向服务架构:支持服务发现、服务订阅等SOA特性
- 高效序列化:比JSON/XML更紧凑的二进制格式
- 支持多种消息类型:Method、Event、Field、Notification
- 低开销:16字节固定头部,适合车载环境
1.3 SOME/IP应用场景
- 车载以太网诊断
- ADAS传感器数据共享
- 车内娱乐系统通信
- V2X车联网通信
二、SOME/IP协议栈
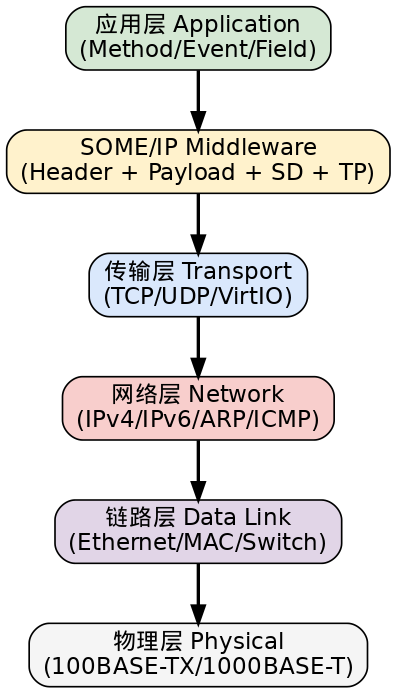
图1:SOME/IP协议栈分层架构
2.1 各层功能说明
SOME/IP协议栈各层功能:
┌─────────────────────────────────────────────────────┐
│ 应用层 (Application Layer) │
│ - Method: 远程过程调用 │
│ - Event: 事件通知 │
│ - Field: 属性读写 │
├─────────────────────────────────────────────────────┤
│ SOME/IP Middleware │
│ - Header: 消息头(16字节固定) │
│ - Payload: 序列化数据 │
│ - SD: 服务发现 │
│ - TP: 传输层协议(分片重组) │
├─────────────────────────────────────────────────────┤
│ 传输层 (Transport Layer) │
│ - TCP: 可靠传输 │
│ - UDP: 高效传输 │
│ - VirtIO: 虚拟机通信 │
├─────────────────────────────────────────────────────┤
│ 网络层 (Network Layer) │
│ - IPv4/IPv6: 寻址 │
│ - ARP: 地址解析 │
│ - ICMP: 差错控制 │
├─────────────────────────────────────────────────────┤
│ 链路层 (Data Link Layer) │
│ - Ethernet: 车载以太网 │
│ - MAC: 媒体访问控制 │
├─────────────────────────────────────────────────────┤
│ 物理层 (Physical Layer) │
│ - 100BASE-TX / 1000BASE-T │
└─────────────────────────────────────────────────────┘三、SOME/IP消息格式
3.1 消息头结构

图2:SOME/IP消息格式
3.2 Header详细字段
SOME/IP Header各字段说明:
┌──────────────────────────────────────────────────────────┐
│ Message ID │ 4 bytes │ 服务和方法标识 │
├──────────────────────────────────────────────────────────┤
│ Length │ 4 bytes │ Header后字节数 │
├──────────────────────────────────────────────────────────┤
│ Request ID │ 4 bytes │ 客户端+会话标识 │
├──────────────────────────────────────────────────────────┤
│ Protocol Version │ 1 byte │ 协议版本(通常为1) │
├──────────────────────────────────────────────────────────┤
│ Interface Version │ 1 byte │ 接口版本号 │
├──────────────────────────────────────────────────────────┤
│ Message Type │ 1 byte │ 消息类型 │
├──────────────────────────────────────────────────────────┤
│ Return Code │ 1 byte │ 返回码 │
├──────────────────────────────────────────────────────────┤
│ Payload │ N bytes │ 序列化数据(可变长) │
└──────────────────────────────────────────────────────────┘
Message ID = Service ID (16 bits) + Method ID (16 bits)
Request ID = Client ID (16 bits) + Session ID (16 bits)3.3 消息类型
SOME/IP消息类型:
┌─────────┬─────────────────────────────────────────────┐
│ Type ID │ 类型说明 │
├─────────┼─────────────────────────────────────────────┤
│ 0x00 │ REQUEST - 请求,需要响应 │
│ 0x01 │ REQUEST_NO_RETURN - 请求,无响应 │
│ 0x02 │ NOTIFICATION - 事件/通知(回调) │
│ 0x40 │ RESPONSE - 响应 │
│ 0x80 │ ERROR - 错误响应 │
│ 0x20 │ TP.MESSAGE - UDP分片标记 │
└─────────┴─────────────────────────────────────────────┘四、SOME/IP服务发现(SD)
4.1 SD消息类型
SD消息类型:
┌──────────────┬────────────────────────────────────────┐
│ 消息类型 │ 说明 │
├──────────────┼────────────────────────────────────────┤
│ FindService │ 客户端查找可用服务 │
│ OfferService │ 服务器提供服务 │
│ StopOffer │ 服务器停止服务 │
│ Subscribe │ 客户端订阅事件组 │
│ SubscribeAck │ 服务器确认订阅 │
│ StopSubscribe│ 客户端取消订阅 │
└──────────────┴────────────────────────────────────────┘4.2 SD流程图
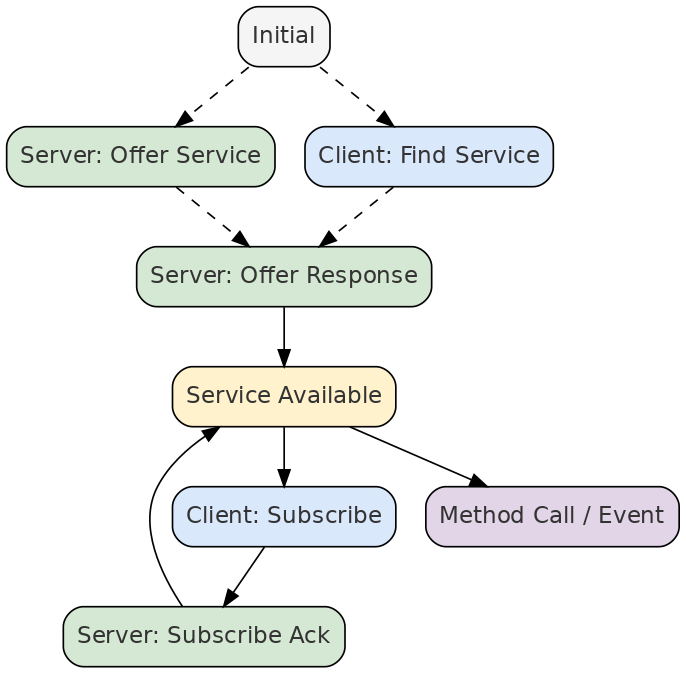
图3:SOME/IP服务发现流程
五、SOME/IP通信流程

图4:SOME/IP客户端-服务端通信流程
5.1 通信流程说明
客户端通信流程:
1. 服务发现阶段
- Client发送 FindService 报文
- Server回复 OfferService 报文
- Client获知服务可用性
2. 订阅阶段(可选)
- Client发送 Subscribe 订阅事件组
- Server回复 SubscribeAck
3. 方法调用
- Client通过Proxy调用Method
- Proxy序列化请求并发送
- Server Skeleton接收并处理
- Server返回响应
- Client获得结果
4. 事件通知
- Server主动推送Event数据
- Client订阅者接收通知六、AUTOSAR AP通信架构
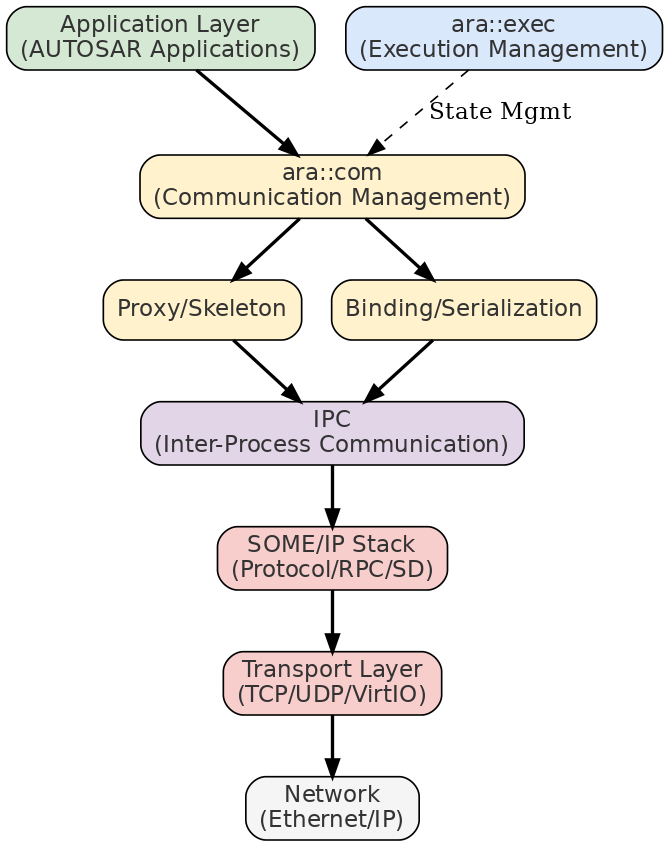
图5:AUTOSAR Adaptive Platform通信架构
6.1 ara::com组件
ara::com是AUTOSAR AP的通信管理模块,提供:
┌──────────────────────────────────────────────────────────┐
│ ara::com 核心组件 │
├──────────────────────────────────────────────────────────┤
│ Service Interface │ 服务接口定义 │
│ Proxy/Skeleton │ 代理/骨架模式 │
│ Port │ 通信端口 │
│ Configuration │ 静态配置 │
└──────────────────────────────────────────────────────────┘
通信方式:
- Method: 同步/异步远程调用
- Event: 事件通知
- Field: 属性访问器(getter/setter/notifier)
- Trigger: 触发器七、实战代码示例
7.1 SOME/IP服务定义(ARXML)
<?xml version="1.0" encoding="UTF-8"?>
<AUTOSAR xmlns="http://autosar.org/schema/r4.8">
<AR-PACKAGES>
<AR-PACKAGE uuid="service-package">
<SHORT-NAME>VehicleInfoService</SHORT-NAME>
<ELEMENTS>
<SERVICE-INTERFACE uuid="vehicle-info-if">
<SHORT-NAME>VehicleInfoInterface</SHORT-NAME>
<METHODS>
<METHOD uuid="get-speed-method">
<SHORT-NAME>GetVehicleSpeed</SHORT-NAME>
<ARGUMENTS>
<ARGUMENT-DIRECTION>OUT</ARGUMENT-DIRECTION>
<TYPE-TREF DEST>SERVICE-INTERFACE-ELEMENT</TYPE-TREF>
</ARGUMENTS>
</METHOD>
</METHODS>
<EVENTS>
<EVENT uuid="speed-event">
<SHORT-NAME>VehicleSpeedEvent</SHORT-NAME>
<TYPE-TREF DEST="SERVICE-INTERFACE-ELEMENT">
Speed_u16
</TYPE-TREF>
</EVENT>
</EVENTS>
</SERVICE-INTERFACE>
</ELEMENTS>
</AR-PACKAGE>
</AR-PACKAGES>
</AUTOSAR>7.2 Proxy调用示例(C++)
#include "vehicle_info_proxy.hpp"
namespace vehicle_info {
class VehicleSpeedClient {
public:
VehicleSpeedClient(ara::com::InstanceIdentifier instance)
: proxy_(instance) {}
// 同步方法调用
Result<uint16_t> GetVehicleSpeed() {
auto handle = proxy_.GetVehicleSpeed();
return handle.get().Value();
}
// 异步方法调用
void GetVehicleSpeedAsync(
std::function<void(ara::core::Result<uint16_t>)> callback) {
proxy_.GetVehicleSpeed().Then(
[callback](ara::core::Future<uint16_t> future) {
callback(future.get());
});
}
// 订阅事件
void SubscribeSpeedEvent() {
proxy_.VehicleSpeedEvent().Subscribe(1);
}
// 处理事件回调
void OnSpeedEvent(uint16_t speed) {
std::cout << "Current speed: " << speed << " km/h" << std::endl;
}
private:
VehicleInfoProxy proxy_;
};
} // namespace vehicle_info7.3 Skeleton实现示例(C++)
#include "vehicle_info_skeleton.hpp"
namespace vehicle_info {
class VehicleSpeedService : public VehicleInfoSkeleton {
public:
VehicleSpeedService(ara::com::InstanceIdentifier instance)
: VehicleInfoSkeleton(instance) {}
// 实现GetVehicleSpeed方法
void GetVehicleSpeed(
std::shared_ptr<ara::com::Promise<uint16_t>> promise) override {
uint16_t speed = ReadFromCAN(); // 从CAN读取速度
promise->SetResult(speed);
}
// 发送事件通知
void PublishSpeedEvent() {
uint16_t speed = ReadFromCAN();
VehicleSpeedEvent().Send(speed);
}
private:
uint16_t ReadFromCAN() {
// 实际从CAN总线读取速度值
// 这里简化处理
return current_speed_;
}
uint16_t current_speed_{0};
};
} // namespace vehicle_info八、调试与排查
8.1 Wireshark抓包分析
Wireshark SOME/IP过滤器:
// 过滤所有SOME/IP报文
someip
// 过滤特定服务
someip.service_id == 0x1234
// 过滤方法调用
someip.msg_type == 0x00
// 过滤事件通知
someip.msg_type == 0x02
// 过滤服务发现
someip.sd
// 过滤UDP分片
someip.msg_type == 0x208.2 常见问题与解决方案
问题1: 服务发现失败
原因: UDP端口被防火墙阻断
解决: 检查防火墙规则,确保30490端口开放
问题2: 序列化错误
原因: 客户端/服务端数据格式不一致
解决: 确认使用相同的序列化协议(Plain CFR/ SOME/IP-TP)
问题3: 大数据分片丢失
原因: UDP分片重组超时
解决: 使用TCP传输或调整MTU配置
问题4: 内存溢出
原因: 事件订阅过多导致缓冲区满
解决: 调整事件队列大小和丢弃策略九、总结

图6:SOME/IP协议实战思维导图
SOME/IP作为AUTOSAR自适应平台的核心通信协议,为车载以太网提供了高效的面向服务通信能力:
- 协议简洁高效:16字节固定头部,最小化开销
- 服务化架构:完整支持SOA方法论
- 多协议支持:TCP/UDP/VirtIO多种传输方式
- 标准化集成:与AUTOSAR AP ara::com深度集成
- 丰富工具链:Wireshark/Vector等全面支持
掌握SOME/IP协议对于开发AUTOSAR AP应用至关重要,特别是在智能驾驶、车联网等高性能通信场景中。
参考资料:
- AUTOSAR BSW Specification - SOME/IP Protocol
- AUTOSAR BSW Specification - ara::com
- BMW SOME/IP Specification
- Vector SOME/IP Training Materials