
一、赛题背景
在新一轮科技革命和产业变革加速推进的背景下,人工智能、自动驾驶与智能机器人技术正成为引领未来产业发展的关键方向。以自动驾驶为代表的智能系统技术,深度融合了感知、决策、控制与系统工程能力,是衡量一个国家科技创新水平和工程实践能力的重要体现。推动相关领域的人才培养与技术创新,对于提升国家科技竞争力、服务重大战略需求具有重要意义。
全球校园人工智能算法精英大赛作为我国高校算法创新与工程实践领域的重要赛事之一,长期致力于引导高校深化实践教学改革,推动以赛促学、以赛促教、以赛促研。智能体对抗挑战赛进一步突出动态环境下的全局路径规划、实时决策,引入裁判系统实时交互、阶段性任务变化等机制,模拟更加接近真实应用场景的智能系统运行环境,让学生掌握具身智能与战术决策机器人的设计与开发能力
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以组委会文件通知为准。
三、比赛规则
(一)参赛(机器人)要求
参赛机器人需满足车模参数要求,可以自制,自制平台需在报名截止前一周内通过邮箱与赛题负责人确认是否满足参赛要求,没有经过书面确认的机器人不能参赛,也可以咨询赛项负责人使用推荐机器人平台。
- 车模参数要求
车模形态:参赛车辆形态不限,轮式、履带式机器人均可,参赛队伍可自行设计、选配或者组装;
车模外观:车模保护壳与外观结构应采用黑色哑光材料,光泽度不高于15Gs;不可遮挡靶子模块,不允许在机器人侧面粘贴贴纸。
车体尺寸:长≤300mm、宽≤250mm、高≤250mm,包含云台、发射机构及所有外设;
车体重量:车体总重量不得超过5kg;
驱动电机要求:单电机额定功率≤10W,驱动电机个数≤2个;
主控综合算力:≤20个TOPS,内存:≤16GB;
禁止云端实时计算:允许离线训练,禁止在线推理。
机器人前后左右需安装激光靶标模块,当靶标被击中两次后,扣一格血,初始血量为10格。


图1 轮式与履带车参考样车
2.参赛通信要求
(1)禁止使用公网通信;
(2)禁止使用自建局域网;
(3)禁止私有无线电干扰;
(4)比赛过程中,任务信息仅通过组委会提供的Wi-Fi通信通道下发。除该通道外,各参赛队伍不得建立任何形式的通信连接(包括但不限于Wi-Fi直连、蓝牙、数传模块等)。
3.比赛场地
智能体对抗挑战赛的比赛场地置于教室或室内体育馆,比赛场地尺寸为5米×3.5米,呈对角线对称的长方形场地,其中数字1、2、3...12是可能放置物资的位置编号。地图材质为刀刮布,考虑到竞赛场地环境可能存在表面不平整、边框上有裂缝、光照条件有变化等因素,各参赛队在设计智能机器人时,需要考虑各种环境下的应对措施。
红蓝双方各设置三个基地,每个基地都可以作为参赛智能车的初始位置。比赛开始时,双方智能车须从各自基地出发;
中间有4块掩体,两侧的掩体采用标准化的35×35厘米围挡拼成正方体,上下掩体由两个35厘米围挡与宽度17厘米的围挡拼成两个长方体,为机器人提供战术掩护与规避敌方火力的空间,提升战术多样性;
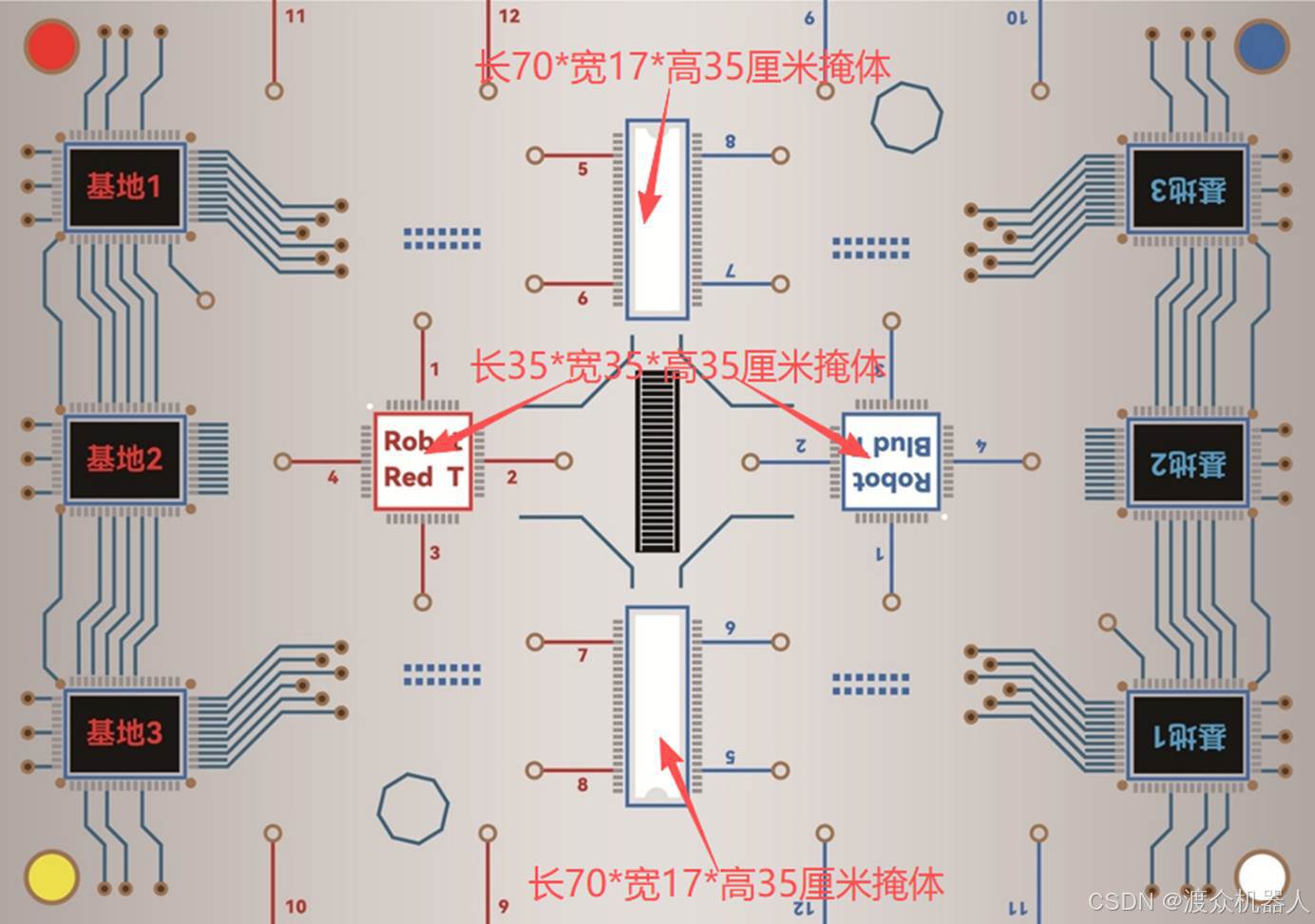
图2 比赛场地示意图
4.裁判系统
裁判系统分为车载端 和裁判端,参赛队员需要在赛前准备阶段完成和裁判端裁判系统的对接,实现车载裁判系统和裁判端裁判系统的正常通讯。车端裁判系统位于车后端且自带 Wi-Fi,与裁判端协同工作,确保比赛信息的准确采集和处理。
裁判端裁判软件系统:在比赛过程中,将双方的物资抢占情况、射击次数、血量、子弹数量,以及得分等信息实时整合处理,并在裁判端裁判系统实时显示。
裁判系统具体使用请参考文档"SmartMaster 裁判系统操作指南"。

图3 车载裁判系统正面

图4 裁判端裁判系统软件界面
(二)比赛过程
**比赛任务描述:**两支参赛队伍的智能车在裁判系统物资点位发布的信息提示下,在规定时间内完成物资抢占、激光射击对抗。
- 赛前候场
- 每队最多3名队员进入候场区;
- 不得携带手机、路由器、笔记本等联网设备;
- 不得在候场区进行无线调试;
- 不得干扰比赛通信。
- 赛前检录
裁判组广播呼叫参赛队伍检录后,5 分钟内未到场的队伍视为自动弃权。
为确保各参赛队伍命中检测系统符合统一标准,所有车辆须在正式比赛前完成检录与一致性测试,未通过者不得参赛,须在规定时间内整改并重新测试。赛前检录时各参赛队不得超过三名参赛队员携带机器人入场,由裁判员对机器人进行检测,并完成赛前检录工作。参赛队员在比赛检录区,不得上网下载任何资料;禁止任何设备与机器人联网。
赛前检录工作包括:
机器人检测:开赛前裁判员对参赛队伍的机器人进行合格性检测,包括表面贴涂情况、裁判系统网络连接情况、激光发射和激光接收靶工况以及遥控器连接情况等。
参赛队员根据各自为红方或蓝方切换机器人激光接收靶颜色。
设置红蓝双方IP地址,车载裁判系统和裁判端裁判系统进行IP绑定,确定红蓝双方IP和端口号。
激光发射头调整:在距发射头1 米距离处,发射出的激光圆点直径不得大于0.6厘米,否则禁止上场
小车前后左右的激光接收靶测试:通过激光发射头发射激光可灵敏触发激光靶接收并掉血。有效识别次数至少识别9次,不得出现连续漏检或明显不稳定现象。
裁判系统通信测试:测试车载裁判系统与裁判端裁判系统是否正常。设置IP、端口号等功能。所有参赛车辆裁判系统必须经过测试,否则不允许上场比赛。
完成检录工作后,参赛队伍对检录结果进行签字确认,队员携带机器人准备开始比赛。
3.准备阶段
准备时间:2分钟。
准备阶段计时开始前,裁判员在裁判端裁判系统中随机生成红蓝方对称位置 的各4个物资编号 ,并把物资编号发送给车载端裁判系统,用于赛前路径规划与策略制定。参赛需根据物资编号自行规划动态全局导航路径,包括如何打击对方的路径以及抢占物资的路径等。
准备时间内:
允许:启动程序;调整参数;预加载地图。
禁止:更换硬件;更改算力单元。
两分钟准备时间结束前,参赛队伍将机器人放置在各自基地位置。
两分钟准备时间结束前20秒,参赛队伍将航模遥控交给裁判员。
准备时间结束后,参赛队员退出比赛场地,裁判员将物资图片固定在比赛场地内靠近指定物资编号的挡板上沿(由裁判系统生成的红蓝双方的4个物资编号),固定位置如图5所示。

图5 物资图片固定位置实拍图
4.比赛阶段
比赛时间:3分钟。
比赛主要任务:本次赛事核心任务分为物资抢占与车车对抗两大模块,参赛队伍可自主制定战术策略,合理分配任务重心,选择以物资抢占为核心、以对抗压制为手段,或兼顾两者的综合竞技方式,完成赛事目标。在比赛3 分钟时间内,可持续进行物资抢占和车车对抗任务。
裁判发出发车口令后:
- 裁判员通过航模遥控将全部车辆切换至自动模式运行;
- 任何人工干预立即判违规;
- 不得触碰车辆;
- 不允许参赛队员通过语音控制车辆。
准备阶段结束后,双方小车当前是遥控模式,裁判通过遥控器上拨码开关切换到自动驾驶模式,比赛正式开始,计时 3 分钟,双方小车从各自基地出发。
(1)抢占物资
物资抢占分为两个阶段,阶段一为物资识别与播报,阶段二为返回基地完成抢占。完成阶段一和阶段二后,计为一次完成抢占,裁判员会在裁判端裁判系统更新物资状态,并为抢占成功的队伍增加相应的分数和子弹数量。抢占完成一个 物资得5分,并增加10发子弹。
同一圈只能抢占一个物资,抢占多个只记录第一个未被抢占完成的物资;同一位置物资只能被抢占一次,被抢占成功后,相同位置物资不能被再次抢占。若两支队伍同时抢占同一物资,先回到基地的视为抢占成功。
阶段一:物资识别与播报
1) 到达识别位置并识别
比赛车辆识别物资时车身必须在物资点引线的圆圈上,例如识别1号物资,车辆需要在如图6所示的圆圈位置识别物资并开始语音播报。物资位置编号范围1--12。如图2所示,地图中红蓝双方物资点的实际位置编号均为1-12。为区分红蓝双方对应物资点,裁判端裁判系统对下发编号进行了重新编码:红方区域物资点编号为1-12,蓝方区域对应物资点编号为101-112。例如,红方1号物资点下发的物资编号为1,蓝方1号物资点下发的物资编号为101,以此类推。
2) 语音播报
当识别成功后,车辆立即进行语音播报以确认识别结果。
语音播报按照"n号位置识别到**"进行播报,例如:2号位置识别到鼠标。
按照地图中实际物资位置播报1-12,即蓝色方和红色方均只播报1-12,不必播报101-112。语音播报开始后,即可离开指定位置。
3) 阶段一完成判定
在指定位置识别到物资且语音播报正确。
阶段二:返回基地完成抢占
1) 返回基地完成抢占:每个基地对应不同的物资种类且每局比赛基地对应哪个物资种类也会变化。比赛准备阶段,裁判系统会随机生成物资类别与基地编号的对应关系;生成对应关系后,系统会实时将该对应关系发送给车辆。
2) 返回规则:车辆在识别物资并播报后,按照抢占物资的类别回到己方对应的基地车位上(至少两个轮子在基地停车框内,停车时间不限)记为一次抢占物资完成;
3) 路径限制:成功抢占并确认物资后,车辆返回物资种类对应的基地途中不能经过其他基地(至少两个轮子在基地停车框内),否则此次抢占物资失败,需重新进行物资抢占;
4) 阶段二完成判定
阶段一完成后,按要求返回到正确基地且未经过其他基地停车框。
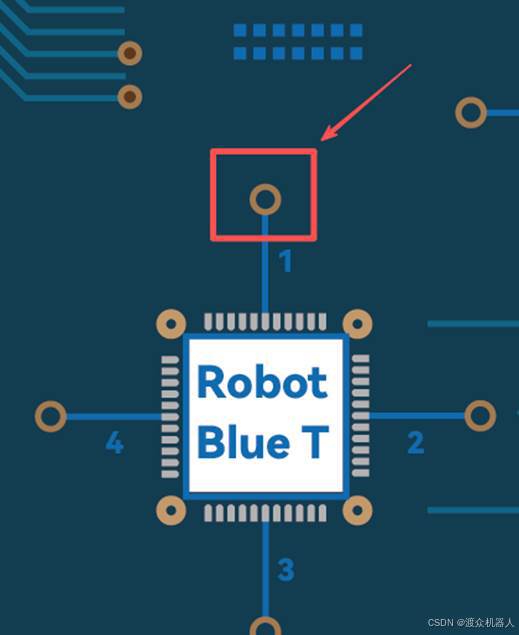
图6 物资编号1对应的抢占物资区域图
(2)车车对抗
双方小车开始各有 10 格血量。(激光发射头接到车载裁判系统上,车载算法计算单元通过uart串口按照指定通信协议给车载裁判系统发送指令触发激光发射,激光最快一秒发射两发)每打中靶子两枪(没有实体弹丸,激光发射一次为一发子弹 ),掉一格血,未抢占物资前双方各有10发子弹。红蓝双方各有4处物资,允许抢占对方物资。双方小车可以通过云台上的激光发射器 对敌方车身前后左右的激光接收靶进行攻击以消耗对方血量和得分。
激光发射频率:为了防止动态瞄准后快速发射激光,车载裁判系统会限制连续激光发射的速度,每秒钟最快发射2次,且每连续发射2次后,激光发射停止1秒。
比赛过程中,裁判系统将双方的子弹个数、已抢占物资编号、血量等信息实时显示到裁判端裁判系统。
(三)碰撞判定机制
比赛不设碰撞责任判定;碰撞后能继续运行视为系统鲁棒性的体现。
小车与固定场地相撞:单场比赛中,比赛车辆碰撞固定场地持续超过10秒,由裁判员将碰撞车辆切换至手动模式使之不再移动(云台仍为自动模式),直至比赛结束。
小车与小车相撞:单局比赛若双方比赛车辆相撞或相遇至均不能行进,经双方同意后裁判员可操作双方车辆错车并继续比赛(耗时不补偿)。若某方不同意,双方比赛车辆相撞或相遇超过10秒不能行进,裁判员可操作双方车辆错车并继续比赛(耗时不补偿)。
四、比赛流程
(一)复赛
复赛将采用线上或线下方式进行,具体比赛方式将于报名截止后另行通知。单场比赛的时间限制为3分钟。
- 复赛线上赛
若复赛阶段采用线上方式进行,则在比赛场地中央区域放置移动靶标作为敌方,模拟车车对抗场景。移动靶标由组委会统一指定,放置位置如图7所示。
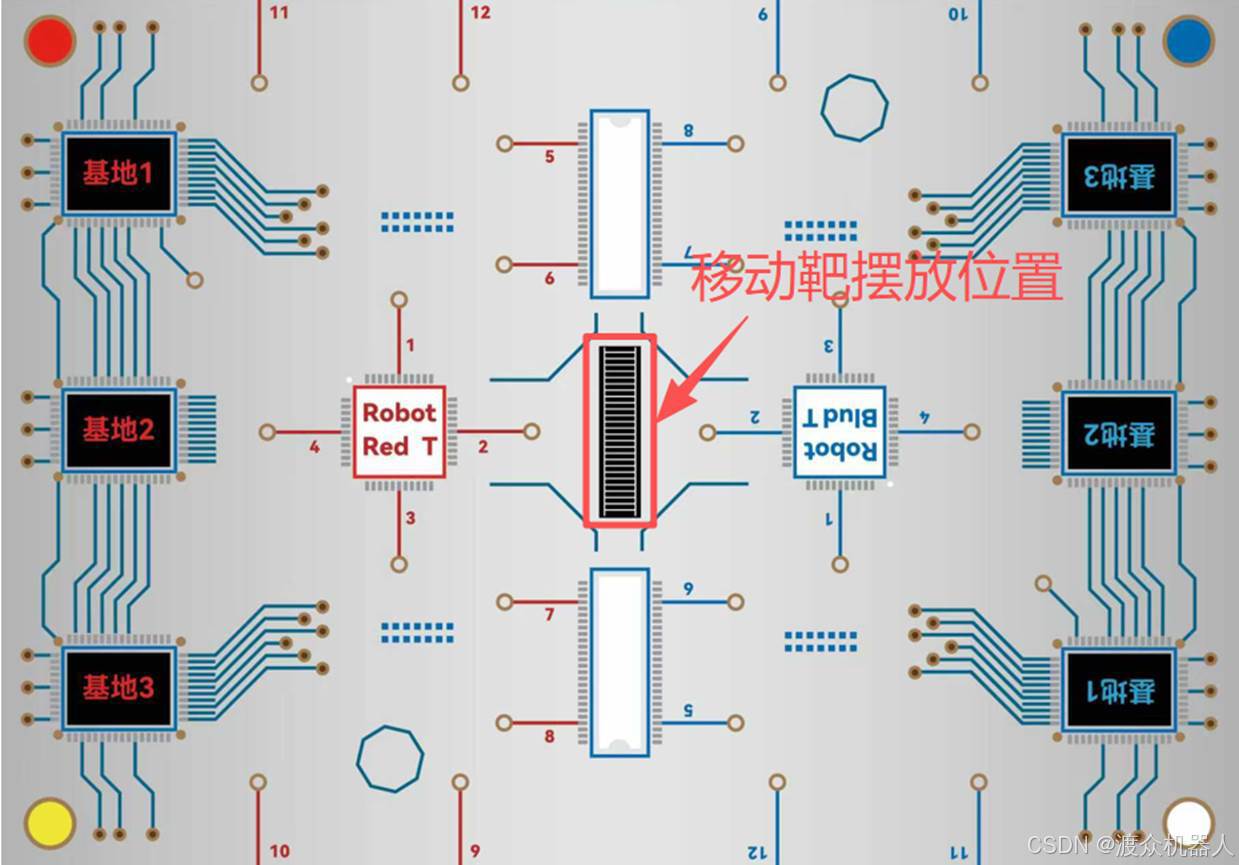
图7 移动靶摆放位置区域图
如图8所示,移动电子靶标采用双面结构,一面为红色、一面为蓝色,其颜色用于表示目标身份。移动电子靶标设有有效命中感应区域,只有激光命中感应区域时才判定为一次有效命中。电子靶标正反两侧均设置独立计数器,用于记录对应侧的受击状态。每累计2次有效命中,受击侧的计数器增加1、电子靶标将向受击面的反方向倾倒,同时灯光熄灭1秒;1秒后自动恢复直立状态,并继续移动。当任意一侧计数器累计达到10时,判定该目标被击毁。被击毁后的电子靶标将向受击面的反方向倾倒,灯光关闭,并持续保持倾倒状态,不再恢复移动。
参赛车辆需要根据己方为红队或蓝队对移动靶标进行射击。若参赛车辆为红队,则需射击移动靶标的蓝色面;若参赛队伍为蓝队,则需射击移动靶标的红色面。射击到指定颜色的移动靶面,每命中2次计数器加 1 且获得 10 分;射击错误颜色,每命中2次计数器加 1但不得分。
复赛每支参赛队伍均有两次机会,一次为红方,一次为蓝方。比赛成绩取两次比赛得分多的一次计为比赛成绩,两次机会之间参赛队伍没有调试时间。所有对局完成后,将按照以下先后优先级依次进行比较,确定复赛最终排名,排名靠前的队伍晋级全国总决赛:
第一优先级:比赛得分
优先比较各队伍比赛得分,比赛得分更高者排名靠前。
第二优先级:总射击得分
若比赛得分相同,则比较总射击得分,得分更高者排名靠前。
2. 复赛线下赛
复赛阶段若采用线下赛,则采用小组循环赛的形式进行比赛。参赛队伍会分为若干组,每支参赛队伍均会与同组内的部分或全部队伍完成对战,根据每局比赛的胜负结果累计积分,积分规则为:胜方积3分,平局积1分,负方积0分。
小组排名优先级规则(按先后顺序依次比较)
所有对局完成后,将按照以下先后优先级依次进行比较,确定小组最终排名,排名靠前的队伍晋级全国总决赛:
第一优先级:小组总积分
优先比较各队伍小组赛累计获得的总积分,总积分更高者排名靠前。
第二优先级:相互胜负关系
若两支或多支队伍总积分相同,则比较这些队伍之间相互对战的胜负结果,在相互交手中获胜的队伍排名靠前。
第三优先级:总净胜分
若积分相同的队伍之间相互胜负关系也无法区分排名,则比较队伍在小组赛所有对局中的总净胜分,总净胜分更高者排名靠前。
第四优先级:总射击得分
若总净胜分仍相同,则比较小组赛所有对局累计获得的总射击得分,得分更高者排名靠前。
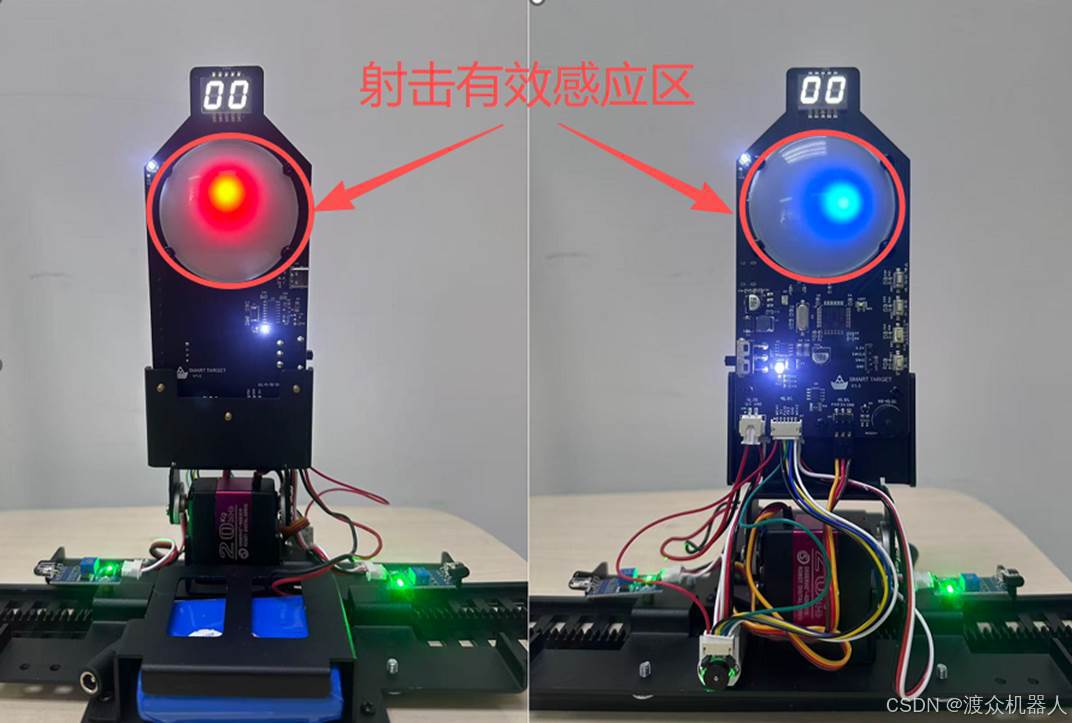
图8移动电子靶标实拍图
(二)总决赛
全国总决赛阶段采用小组赛+淘汰赛的赛制:
小组赛阶段:晋级队伍先通过分组单循环赛完成排名,选拔出晋级淘汰赛的队伍,积分规则与复赛一致;
淘汰赛阶段:采用BO3三局两胜制,两两对决直至决出最终的冠亚季军;若出现1胜1负1平的情况,则按下述先后优先级依次比较数据,判定最终胜负:
第一优先级:比较双方三局累计总净胜分,净胜分更高的队伍获胜;
第二优先级:若总净胜分相同,则比较双方三局累计总射击得分,得分更高的队伍获胜。
结合参赛队伍数量,总决赛可能增设预选赛,预选赛相关事宜将在报名结束后另行通知。
五、评分规则
(一)单局比赛基础规则
比赛形式:1V1实体机器人对抗,两支参赛队伍的参赛车辆在同一场地内完成博弈;
比赛时长:单局比赛标准时长为3分钟;
时间判定:比赛采用统一计时作为时间基准。比赛时间到达后,由现场统一计时信号判定比赛结束,并进入结果结算阶段。
(二)计分规则
线下赛比赛计时3分钟,到达比赛时间,比赛结束。如果一方把对方的血条全部打掉,则该方获胜。若没打爆,得分多的一方为胜方,反之为败方。
线下评审打分表
|----|----------------|------|------|
| 序号 | 评分项 | 红方得分 | 蓝方得分 |
| 1 | 比赛车辆成功驶离基地(5分) | | |
| 2 | 资源得分(5分/个) | | |
| 3 | 射击得分(10分/格) | | |
| 总分 || | |
| 胜负 || | |
线上赛比赛计时3分钟,到达比赛时间,比赛结束。
线上评审打分表
|----|----------------|------|------|
| 序号 | 评分项 | 红方得分 | 蓝方得分 |
| 1 | 比赛车辆成功驶离基地(5分) | | |
| 2 | 资源得分(5分/个) | | |
| 3 | 射击得分(10分/格) | | |
| 总分 || | |
六、其他说明
参赛队伍务必加入QQ群。
本次竞赛,参赛团队需要掌握 C++/Python、图像处理技术、ROS、嵌入式系统、自动控制、机械结构设计、软件系统开发、通信、大模型开发等相关技术知识。
相关前置课程知识可点击百度网盘链接获取:
https://pan.baidu.com/s/1Iw2-qpu2b0q1zQ29UdtjnQ?pwd=jrxa
提取码: jrxa