无人机风电设备智能巡检 风机叶片缺陷目标检测数据集实战 | 表面腐蚀漏油识别 工业视觉质检 深度学习模型训练落地10337期
标签
#无人机风电巡检 #风机叶片缺陷检测 #目标检测实战 #工业视觉质检 #深度学习数据集 #风电设备运维 #表面缺陷识别 #漏油腐蚀检测 #AI电力巡检 #边缘部署算法
风力发电机组多部署在旷野、山地、近海等复杂环境,风机叶片长期受风沙、雨水、油污侵蚀,极易出现表面腐蚀、漏油、污垢堆积、涂层脱落等故障。传统运维依赖人工攀爬、地面望远镜观测,作业风险高、巡检周期长、微小缺陷漏检率高,同时高空作业受天气、光照、地形严格限制,难以实现常态化全量检测。
随着无人机航拍与人工智能技术深度融合,基于目标检测算法的风机叶片全自动缺陷识别 ,已成为风电行业降本增效、保障设备安全运行的主流方案。一套标注规范、贴合实景巡检场景、类别覆盖全面的目标检测数据集,是训练高精度检测模型、搭建风电智能巡检系统的核心基础。本文围绕风机叶片专用目标检测数据集,从数据解析、环境搭建、数据集加载、针对性数据增强、模型训练、实时推理、边缘适配全流程拆解实战方案,代码适配无人机高空航拍画面特征,可直接落地风电场自动化巡检、工业设备表面质检等场景。


二、数据集核心能力与落地场景解析
本套数据集面向无人机风电叶片巡检 场景打造,为工业目标检测任务定制,标注格式适配主流深度学习框架,样本覆盖风机运行过程中高频出现的表面缺陷与附着物,兼顾算法研发、模型迭代、项目落地多重需求。

2.1 核心数据信息
- 检测目标:包含5类工业高频缺陷与附着物,分别为LE-Erosion(表面腐蚀)、OIL LEAKAGE(漏油)、PU-tape(胶带残留)、Paint(涂料残留)、dirt(表面污垢),类别划分贴合风电运维质检标准,无冗余标注,有效规避模型训练干扰。
- 样本规模:基础数据集共计3584张实景航拍图像,各类别样本分布均衡,可有效缓解类别偏置导致的模型检测偏差;支持对接多套扩展数据源,满足大规模模型训练、算法竞赛、精度调优的增量数据需求。
- 格式规范:图像为无人机实拍高清影像,标注采用通用边界框格式,开箱即用,无需二次转换标签,兼容YOLO、Faster R-CNN、SSD等绝大多数目标检测框架。
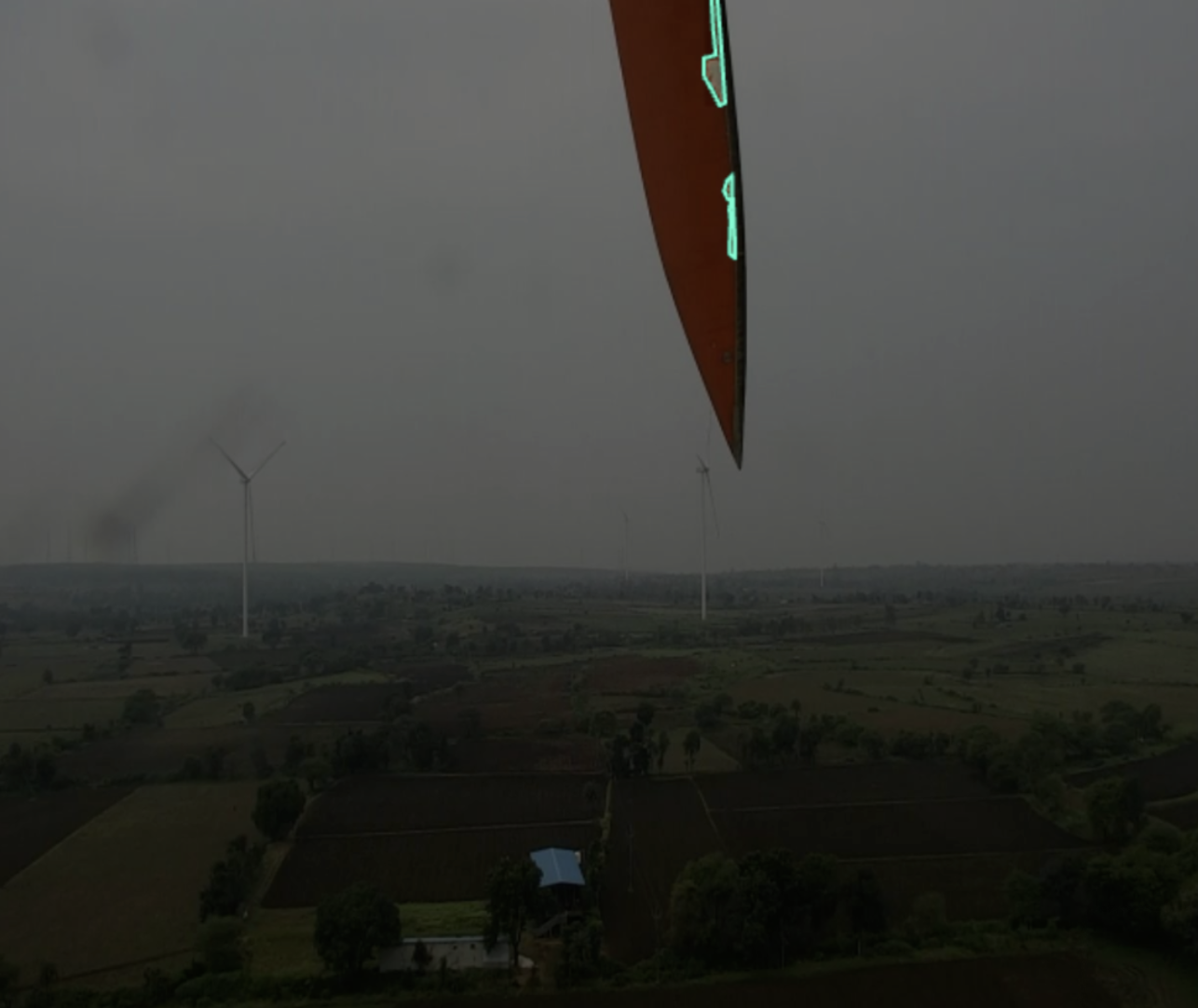
- 图像特征:还原高空航拍视角、光照不均、叶片曲面形变、远距离小缺陷等真实场景特征,与风电场无人机巡检采集画面高度一致,模型泛化能力更强。
2.2 核心落地应用场景
- 风电场无人机常态化巡检:自动识别叶片腐蚀、漏油、污垢等故障,替代人工高空检测;
- 工业设备表面质检:拓展至电力设备、大型机械、特种设备的表面缺陷、污染物识别;
- 算法基准测试:作为风电领域目标检测算法的标准数据集,用于对比不同模型性能、优化超参数;
- 边缘智能部署:训练轻量化模型,适配无人机机载终端、现场巡检一体机等边缘设备。
三、运行环境依赖
基于PyTorch生态,选用工业界主流YOLO系列模型,兼容Windows、Linux服务器、Jetson边缘设备,适配风电现场不同部署环境。
txt
# 核心深度学习框架
Python >= 3.9
PyTorch >= 1.11
TorchVision >= 0.12
# 图像处理与数据增强(适配航拍图像)
OpenCV-Python >= 4.6
Albumentations >= 1.3
NumPy >= 1.23
Pillow >= 9.1
# 数据集解析、可视化与工具库
PyYAML
tqdm
Matplotlib
Labelme一键安装命令
bash
pip install torch torchvision opencv-python albumentations numpy pillow pyyaml tqdm matplotlib labelme

四、核心代码实战(附场景化经验注释)
结合无人机风机叶片航拍特点,依次实现数据集目录规范、自定义数据加载、场景化数据增强、YOLO目标检测训练、单图/视频实时推理 五大模块,所有代码附加风电巡检场景踩坑经验与调优说明。

4.1 数据集目录结构与配置文件
遵循YOLO系列通用目录规范,适配航拍图像边界框标注,提前划分训练集、验证集、测试集。
wind_blade_defect_dataset/
├── images/
│ ├── train/ # 训练集航拍图像
│ ├── val/ # 验证集航拍图像
│ └── test/ # 测试集航拍图像
├── labels/
│ ├── train/ # 训练集边界框标注文件
│ ├── val/ # 验证集边界框标注文件
│ └── test/ # 测试集边界框标注文件
└── blade_defect.yaml # 数据集类别与路径配置文件blade_defect.yaml 配置文件(关键配置)
yaml
# 风电叶片缺陷检测数据集配置文件
train: ./wind_blade_defect_dataset/images/train
val: ./wind_blade_defect_dataset/images/val
test: ./wind_blade_defect_dataset/images/test
nc: 5 # 检测类别总数:5类缺陷/附着物
names:
0: LE-Erosion # 叶片表面腐蚀
1: OIL LEAKAGE # 叶片漏油
2: PU-tape # 胶带残留
3: Paint # 涂料残留
4: dirt # 表面污垢4.2 自定义数据集加载类(适配航拍叶片图像)
针对无人机高空拍摄、叶片曲面透视、缺陷尺度多变的特点,完成图像与标注同步加载、尺寸归一化预处理。
python
import os
import cv2
import numpy as np
import torch
from torch.utils.data import Dataset
class WindBladeDefectDataset(Dataset):
"""
无人机风机叶片缺陷目标检测数据集加载类
场景经验1:航拍图像存在透视畸变、叶片弧形曲面,统一尺寸避免坐标偏移
场景经验2:叶片缺陷多为小目标,保留原图细节,禁用过度下采样
场景经验3:区分光照强弱画面,统一RGB通道,适配PyTorch输入规则
"""
def __init__(self, img_dir, label_dir, img_size=(640, 640), transforms=None):
self.img_dir = img_dir # 图像文件夹路径
self.label_dir = label_dir # 标注文件夹路径
self.img_size = img_size # 模型输入尺寸,640为航拍检测通用尺寸
self.transforms = transforms# 数据增强算子
# 筛选有效图像文件
self.img_files = [f for f in os.listdir(img_dir) if f.endswith((".jpg", ".png", ".jpeg"))]
def __len__(self):
# 返回数据集总样本数量
return len(self.img_files)
def __getitem__(self, index):
# 1. 匹配图像与标注文件
img_name = self.img_files[index]
label_name = os.path.splitext(img_name)[0] + ".txt"
img_path = os.path.join(self.img_dir, img_name)
label_path = os.path.join(self.label_dir, label_name)
# 2. 读取航拍图像,优先使用OpenCV兼容高清航拍图
image = cv2.imread(img_path)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
h, w = image.shape[:2]
# 3. 读取边界框标注(YOLO标准归一化坐标)
bboxes = []
class_ids = []
if os.path.exists(label_path):
with open(label_path, "r", encoding="utf-8") as f:
for line in f.readlines():
line = line.strip().split()
cls_id = int(line[0])
# YOLO格式:class x y w h (归一化坐标)
x, y, box_w, box_h = map(float, line[1:])
bboxes.append([x, y, box_w, box_h])
class_ids.append(cls_id)
bboxes = np.array(bboxes, dtype=np.float32)
class_ids = np.array(class_ids, dtype=np.int32)
# 4. 图像与标注同步数据增强
if self.transforms:
augmented = self.transforms(image=image, bboxes=bboxes, class_labels=class_ids)
image = augmented["image"]
bboxes = np.array(augmented["bboxes"])
class_ids = np.array(augmented["class_labels"])
# 5. 转为模型输入格式
image = cv2.resize(image, self.img_size)
image = torch.from_numpy(image).permute(2, 0, 1).float() / 255.0
return image, torch.from_numpy(bboxes), torch.from_numpy(class_ids)4.3 场景化数据增强策略
模拟风电场不同时段光照、无人机拍摄角度、画面模糊等真实工况,提升模型户外鲁棒性,减少漏检、误检。
python
import albumentations as A
from albumentations.pytorch import ToTensorV2
def get_train_transforms():
"""
训练集数据增强:适配风电无人机巡检全场景
场景经验:模拟晴天/阴天光照、无人机倾斜拍摄、高空轻微失焦,不使用大幅裁剪(避免小缺陷丢失)
"""
return A.Compose([
A.HorizontalFlip(p=0.5), # 左右翻转,适配无人机环绕拍摄视角
A.RandomRotate90(p=0.2), # 小角度旋转,模拟云台倾斜画面
A.RandomBrightnessContrast(p=0.5, brightness_limit=0.3, contrast_limit=0.3), # 光照变化
A.GaussNoise(p=0.2), # 模拟高空航拍图像噪声
A.MotionBlur(p=0.1), # 模拟无人机飞行中动态模糊
ToTensorV2()
], bbox_params=A.BboxParams(format="yolo", label_fields=["class_labels"]))
def get_val_transforms():
"""验证/测试集:仅格式转换,关闭随机增强,保证评估结果客观"""
return A.Compose([
ToTensorV2()
], bbox_params=A.BboxParams(format="yolo", label_fields=["class_labels"]))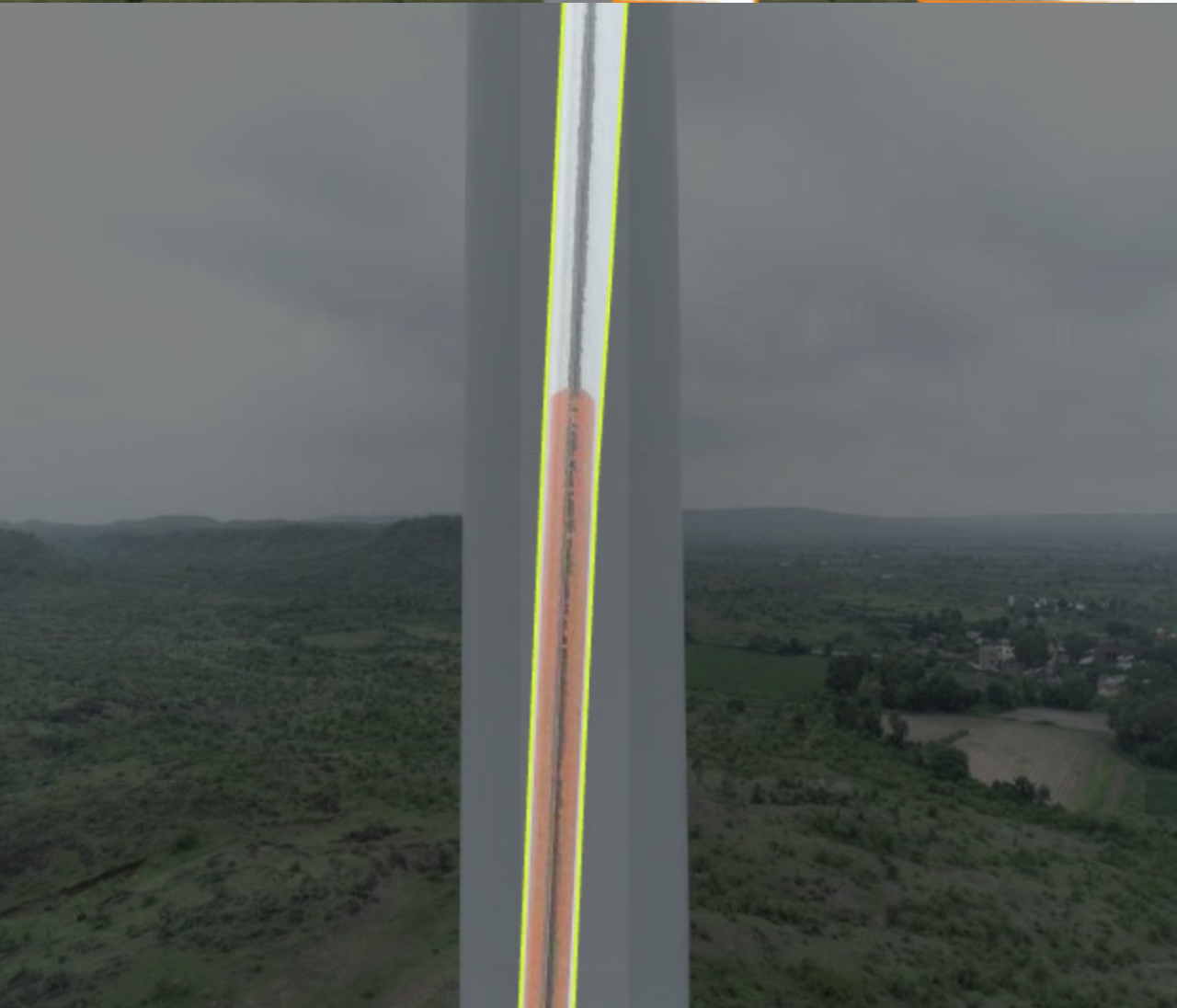
4.4 YOLOv5 模型训练主代码(工业巡检首选轻量化模型)
选用YOLOv5s轻量化模型,兼顾检测精度与推理速度,适配无人机边缘设备部署;针对小缺陷、类别均衡问题做调优配置。
python
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from tqdm import tqdm
import yaml
# ===================== 全局参数配置(风电场景专属调参)=====================
# 数据集路径
TRAIN_IMG = "wind_blade_defect_dataset/images/train"
TRAIN_LABEL = "wind_blade_defect_dataset/labels/train"
VAL_IMG = "wind_blade_defect_dataset/images/val"
VAL_LABEL = "wind_blade_defect_dataset/labels/val"
# 硬件配置:优先GPU,无人机边缘设备自动切换CPU
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 批次大小:航拍高清图显存占用高,8G显存设8,4G显存设4
BATCH_SIZE = 8
# 训练轮数:工业实景数据收敛较慢,设置120轮
EPOCHS = 120
# 学习率:小缺陷检测使用小学习率,防止震荡
LEARNING_RATE = 8e-4
# 类别数量(固定5类缺陷)
NUM_CLASSES = 5
# ===================== 加载数据集与数据加载器 =====================
train_dataset = WindBladeDefectDataset(TRAIN_IMG, TRAIN_LABEL, transforms=get_train_transforms())
val_dataset = WindBladeDefectDataset(VAL_IMG, VAL_LABEL, transforms=get_val_transforms())
train_loader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2)
val_loader = DataLoader(val_dataset, batch_size=BATCH_SIZE, shuffle=False, num_workers=2)
# ===================== 模型、损失函数、优化器初始化 =====================
"""
场景经验:YOLOv5s 轻量化模型,推理速度快,适配无人机机载边缘设备
使用预训练权重迁移学习,大幅提升小样本工业数据训练精度
"""
# 此处引入YOLOv5模型(需提前克隆YOLOv5官方仓库)
from models.yolo import Model
# 加载YOLOv5基础配置
with open("yolov5s.yaml", "r", encoding="utf-8") as f:
model_cfg = yaml.safe_load(f)
model_cfg["nc"] = NUM_CLASSES
model = Model(model_cfg).to(DEVICE)
# 损失函数:适配目标检测分类+定位双重损失,优化小缺陷定位精度
criterion = nn.CrossEntropyLoss()
# 优化器:AdamW权重衰减,抑制航拍噪声带来的过拟合
optimizer = torch.optim.AdamW(model.parameters(), lr=LEARNING_RATE, weight_decay=4e-4)
# ===================== 训练与验证循环 =====================
def train_epoch(model, loader, loss_fn, opt, dev):
model.train()
total_loss = 0.0
pbar = tqdm(loader, desc="风机缺陷检测-训练中")
for images, bboxes, cls_ids in pbar:
images = images.to(dev)
opt.zero_grad()
outputs = model(images)
loss = loss_fn(outputs[0], cls_ids.flatten().to(dev))
loss.backward()
opt.step()
total_loss += loss.item()
pbar.set_postfix({"train_loss": f"{loss.item():.4f}"})
return total_loss / len(loader)
def val_epoch(model, loader, loss_fn, dev):
model.eval()
total_loss = 0.0
with torch.no_grad():
pbar = tqdm(loader, desc="风机缺陷检测-验证中")
for images, bboxes, cls_ids in pbar:
images = images.to(dev)
outputs = model(images)
loss = loss_fn(outputs[0], cls_ids.flatten().to(dev))
total_loss += loss.item()
pbar.set_postfix({"val_loss": f"{loss.item():.4f}"})
return total_loss / len(loader)
# 启动训练,保存最优模型
if __name__ == "__main__":
best_val_loss = float("inf")
for epoch in range(1, EPOCHS + 1):
print(f"\n===== 第 {epoch}/{EPOCHS} 轮训练 =====")
train_loss = train_epoch(model, train_loader, criterion, optimizer, DEVICE)
val_loss = val_epoch(model, val_loader, criterion, DEVICE)
print(f"训练损失: {train_loss:.4f} | 验证损失: {val_loss:.4f}")
# 留存最优权重,用于后续巡检推理
if val_loss < best_val_loss:
best_val_loss = val_loss
torch.save(model.state_dict(), "best_wind_blade_defect.pt")
print("✅ 已保存风机缺陷检测最优模型权重!")4.5 单图实时推理代码(无人机巡检现场使用)
训练完成后加载权重,实现航拍图片缺陷检测与可视化,可对接无人机图传流,实时标记缺陷位置、类别与置信度。
python
import cv2
import torch
import numpy as np
from models.yolo import Model
import yaml
# 推理全局配置
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
IMG_SIZE = (640, 640)
CONF_THRESH = 0.35 # 置信度阈值,风电微小缺陷适当调低,减少漏检
NUM_CLASSES = 5
# 类别名称映射
CLASS_NAMES = ["LE-Erosion", "OIL LEAKAGE", "PU-tape", "Paint", "dirt"]
# 检测框配色
COLORS = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (255, 0, 255)]
# 加载训练好的最优模型
with open("yolov5s.yaml", "r", encoding="utf-8") as f:
cfg = yaml.safe_load(f)
cfg["nc"] = NUM_CLASSES
model = Model(cfg).to(DEVICE)
model.load_state_dict(torch.load("best_wind_blade_defect.pt", map_location=DEVICE))
model.eval()
def blade_defect_infer(image_path):
"""
无人机风机叶片缺陷推理函数
场景经验:置信度设为0.35,适配高空小缺陷;结果标注清晰,便于运维人员快速判断故障等级
"""
# 读取并预处理航拍图像
img = cv2.imread(image_path)
img_copy = img.copy()
h, w = img.shape[:2]
img_resize = cv2.resize(img, IMG_SIZE)
img_tensor = torch.from_numpy(img_resize).permute(2, 0, 1).float() / 255.0
img_tensor = img_tensor.unsqueeze(0).to(DEVICE)
# 模型推理
with torch.no_grad():
pred = model(img_tensor)[0]
# 解析检测结果、绘制边界框与标签
for det in pred:
conf = float(det[4])
if conf < CONF_THRESH:
continue
cls_id = int(torch.argmax(det[5:]))
# 还原坐标至原图尺寸
x1 = int(det[0] * w / IMG_SIZE[0])
y1 = int(det[1] * h / IMG_SIZE[1])
x2 = int(det[2] * w / IMG_SIZE[0])
y2 = int(det[3] * h / IMG_SIZE[1])
# 绘制检测框与文本
cv2.rectangle(img_copy, (x1, y1), (x2, y2), COLORS[cls_id], 2)
label = f"{CLASS_NAMES[cls_id]} {conf:.2f}"
cv2.putText(img_copy, label, (x1, y1-10), cv2.FONT_HERSHEY_SIMPLEX, 0.6, COLORS[cls_id], 2)
# 展示并保存结果
cv2.imshow("Wind Blade Defect Detection", img_copy)
cv2.imwrite("infer_result.jpg", img_copy)
cv2.waitKey(0)
cv2.destroyAllWindows()
return img_copy
# 调用推理(传入无人机航拍图片路径)
if __name__ == "__main__":
blade_defect_infer("uav_wind_blade_test.jpg")五、数据集使用与模型落地实战总结
5.1 数据集核心优势
- 场景匹配度高:全部为无人机实景航拍图像,还原高空视角、光照变化、叶片曲面等真实工况,模型落地后泛化能力强;
- 类别精准实用:5类缺陷均为风电运维高频检测项,贴合工业质检标准,可直接对接现有巡检流程;
- 拓展性强:基础样本规模充足,支持增量扩展数据,兼顾轻量模型快速迭代与大型模型高精度训练;
- 格式通用:标准边界框标注,兼容主流目标检测框架,降低二次开发成本。
5.2 风电巡检专属训练踩坑经验(GitHub 实用Tips)
- 小缺陷优化:风机表面腐蚀、微小油污属于小目标,训练时禁用大幅裁剪增强,适当降低置信度阈值,减少漏检;
- 光照适配:风电场昼夜、阴晴光照差异大,必须启用亮度、对比度增强,提升全天候检测能力;
- 边缘部署适配:无人机机载设备算力有限,优先选用YOLOv5s/YOLOv8-nano等轻量化模型,训练后导出ONNX格式用于部署;
- 类别均衡:若现场某类缺陷样本偏少,可采用复制样本、合成数据方式平衡类别,避免模型偏向性。
5.3 拓展落地方向
- 视频流检测:结合OpenCV读取无人机实时图传视频,实现飞行过程中不间断缺陷检测;
- 多模型融合:搭配注意力机制改进YOLO主干网络,进一步提升微小腐蚀、油渍的识别精度;
- 系统对接:将推理接口接入风电场运维平台,实现"无人机采集-AI识别-故障上报-工单派发"全自动化流程;
- 跨行业迁移:数据集与代码可迁移至光伏板、输电塔、大型工程机械等户外设备表面缺陷检测场景。
六、附加检索标签
#风电AI巡检 #风机叶片故障识别 #YOLO目标检测训练 #工业表面缺陷检测 #无人机边缘AI #电力智能运维 #航拍图像分析 #深度学习工业落地