这个是全网最详细的STM32项目教学视频。
第一篇在这里:
视频在这里
STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机 跟随
19.4-STM32接收数据-状态显示在屏幕
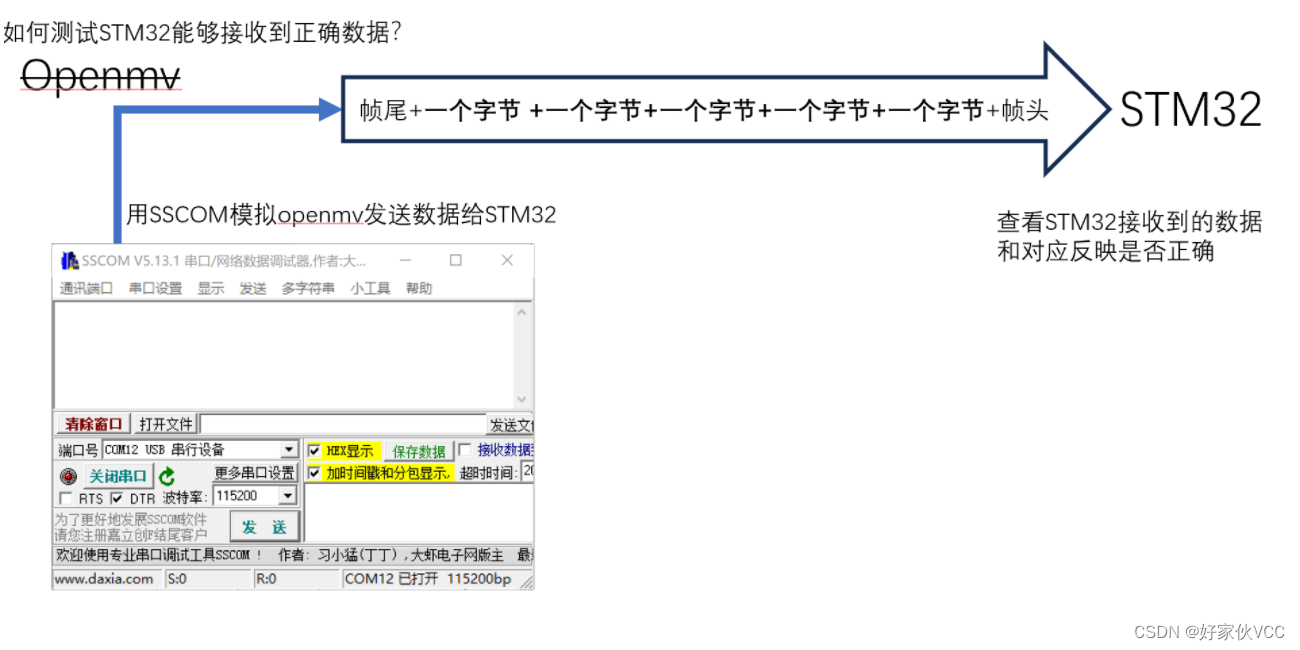
先通过串口上位机模拟发送、
STM32有视觉循迹模式、该模式下接收到数据根据状态显示在屏幕上,现在此状态并不控制电机。
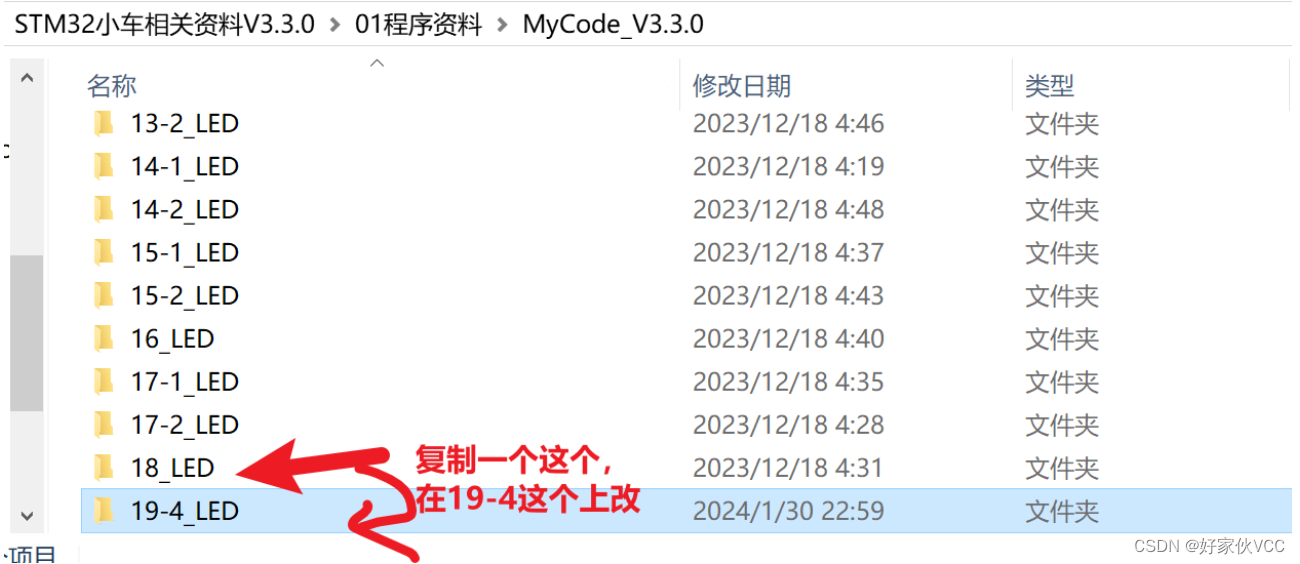
复制一下18在上面基础改,命名成19-4_LED
可以先复制到桌面英文路径,防止出现中文路径兼容问题。
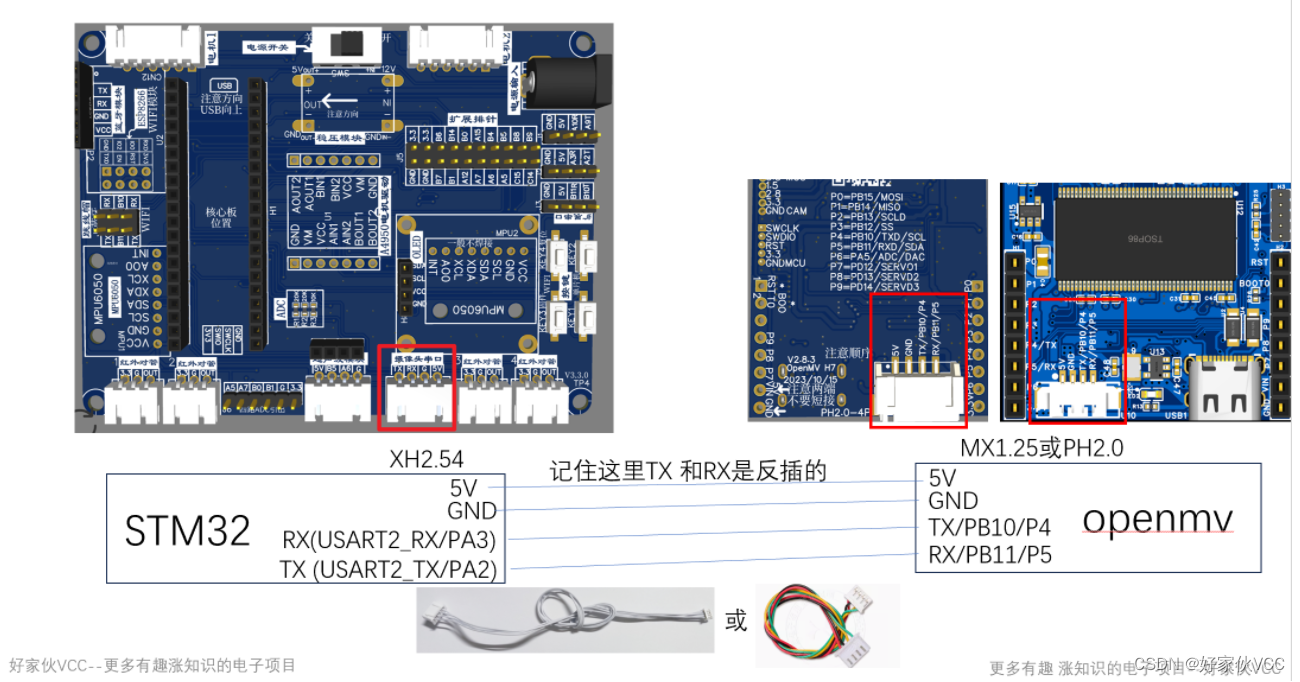
看原理图摄像头是预留什么引脚
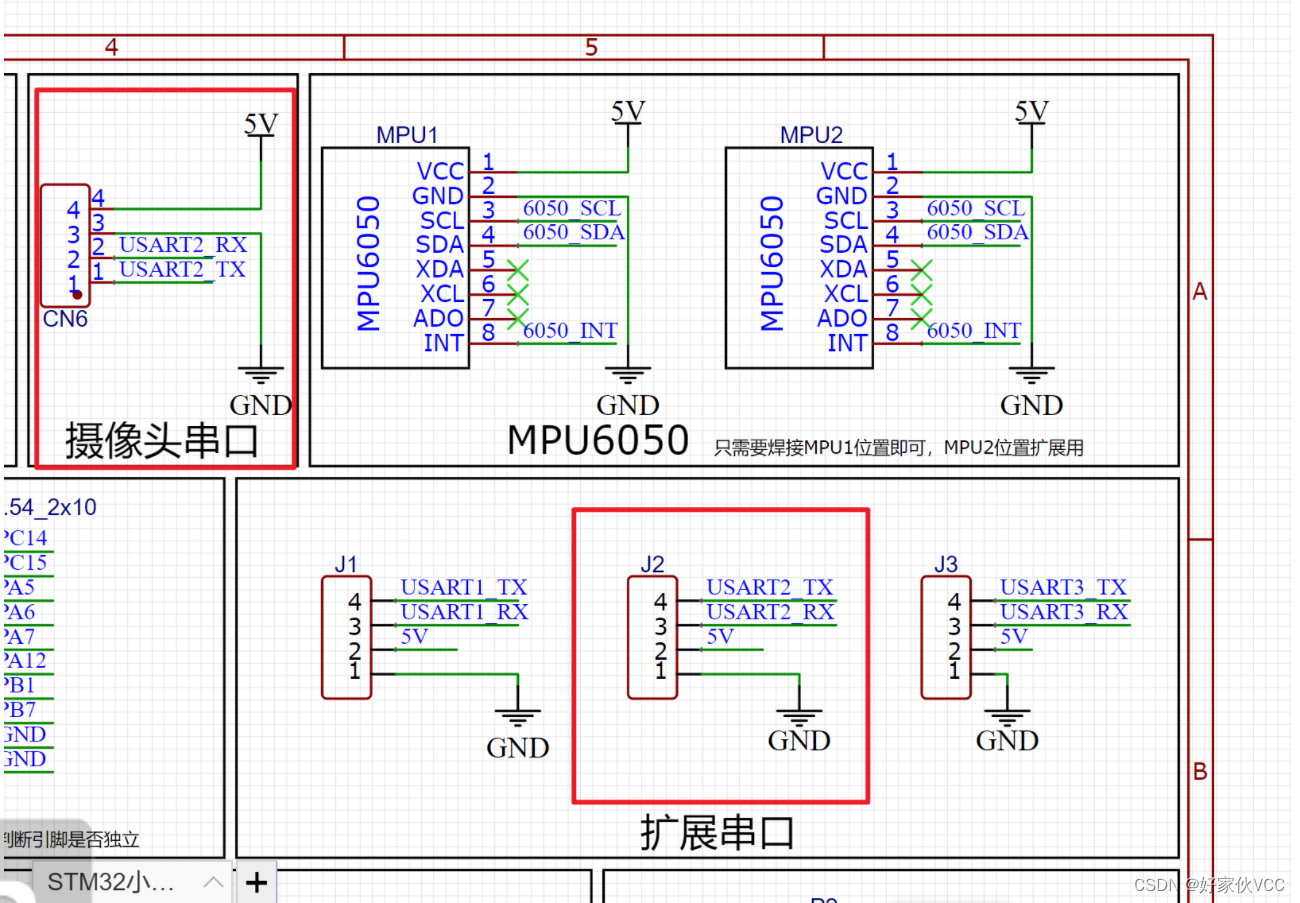
PCB中可以看到接口位置
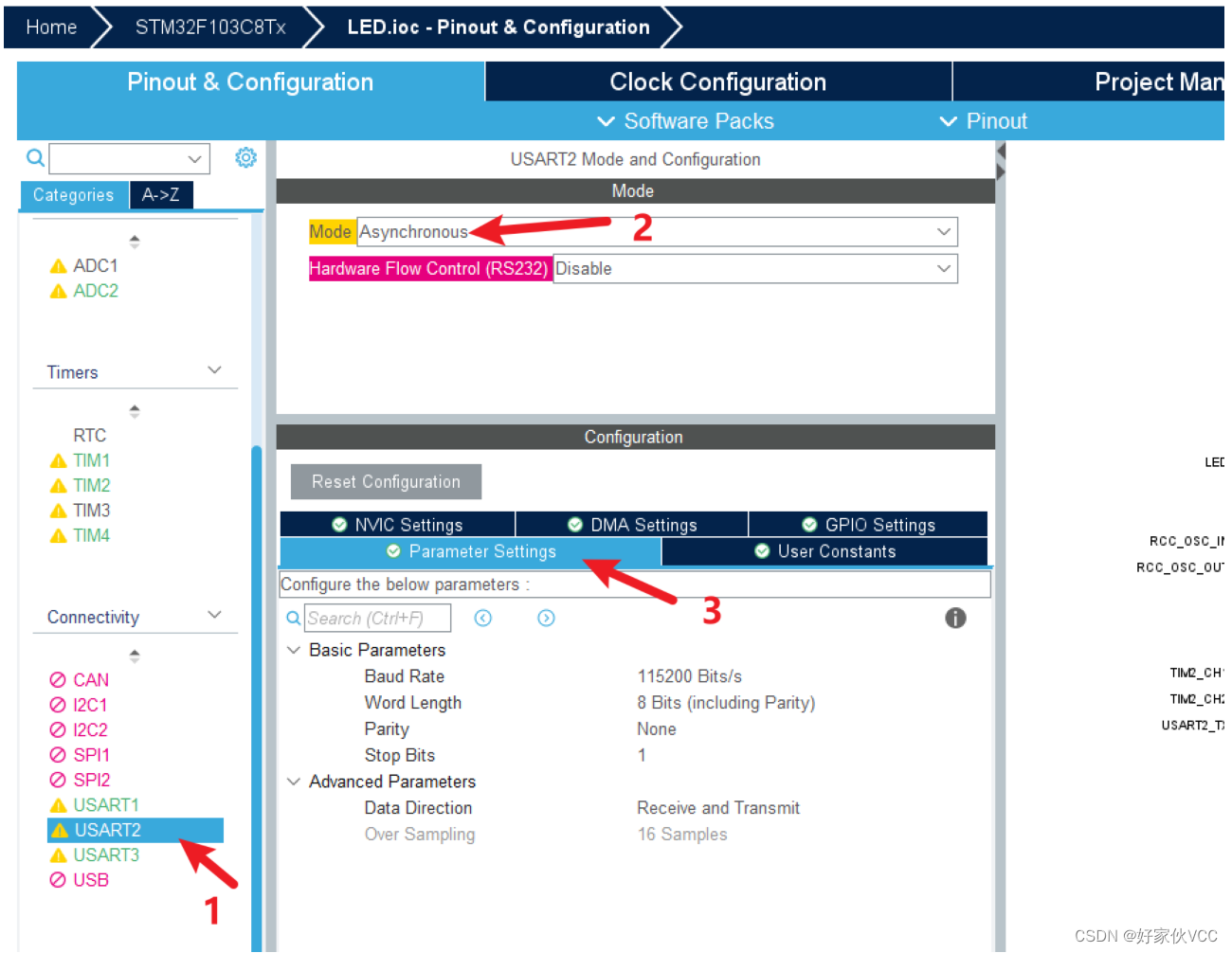
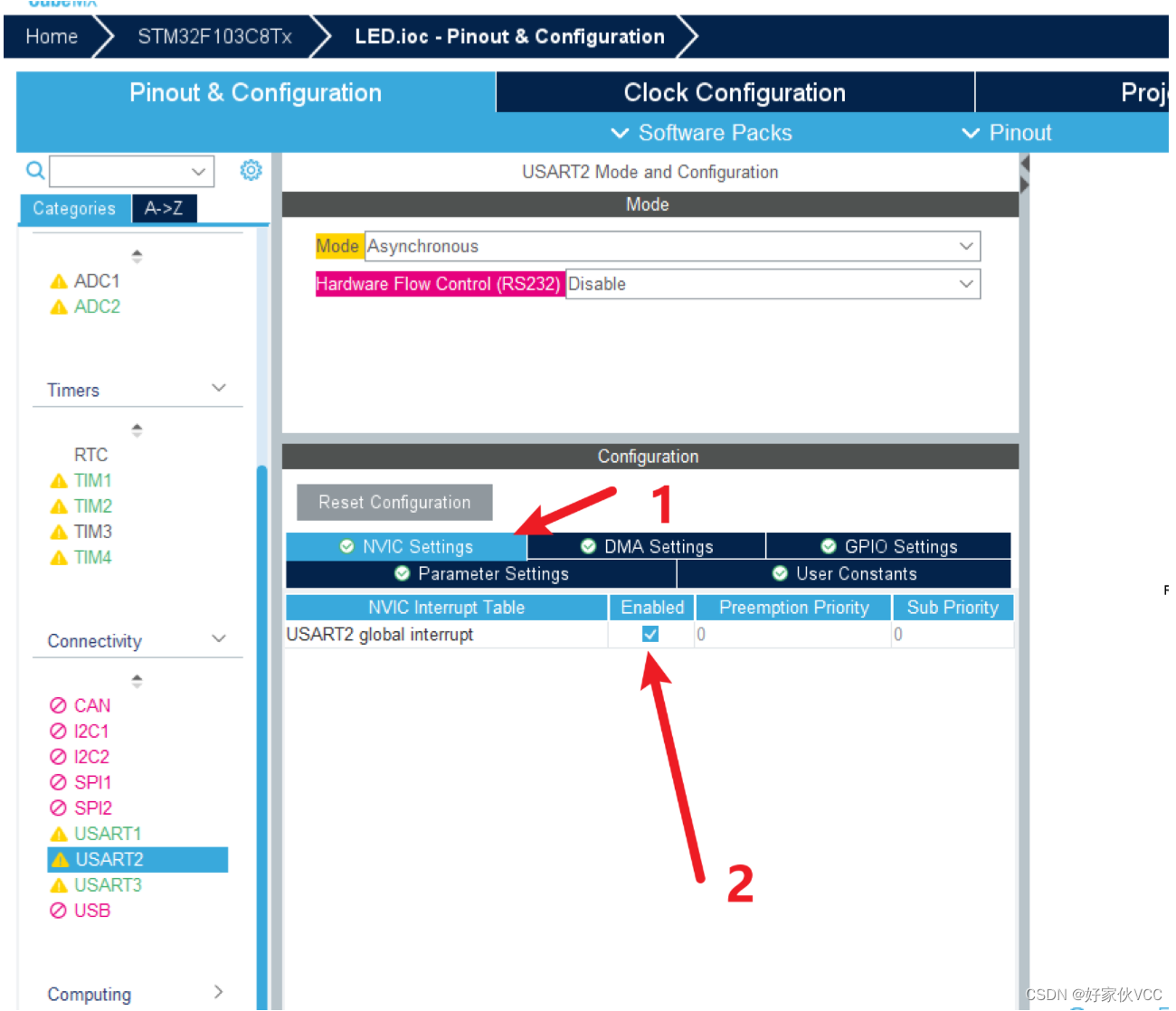
所以我们要初始化一下串口二,然后开启串口接收中断

串口2 开启初始化
开启串口中断
生成代码

打开代码
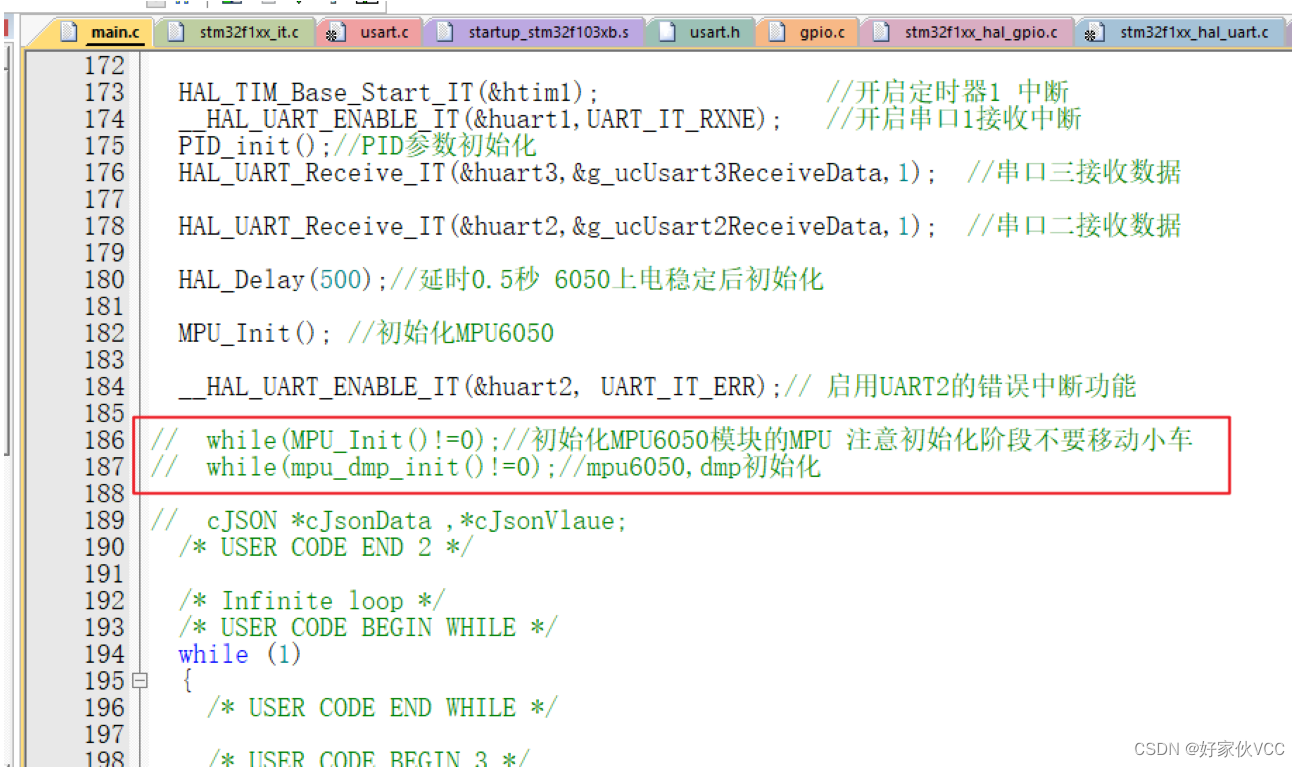
如果发现18章代码经常出现黑屏,那可能就是6050的初始化卡住了,我们可以注释掉一下MPU6050部分的代码。
我们先定义一个串口二接收数据变量
c
uint8_t g_ucUsart2ReceiveData; //保存串口二接收的数据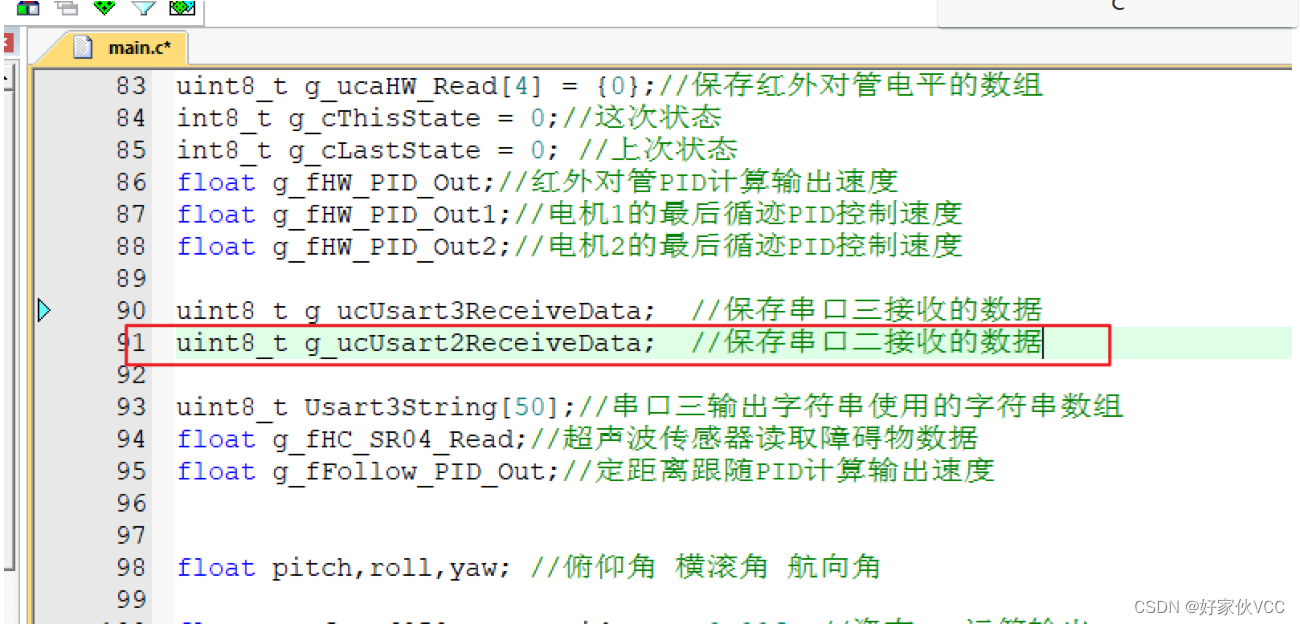
开启接收中断
c
HAL_UART_Receive_IT(&huart2,&g_ucUsart2ReceiveData,1); //串口二接收数据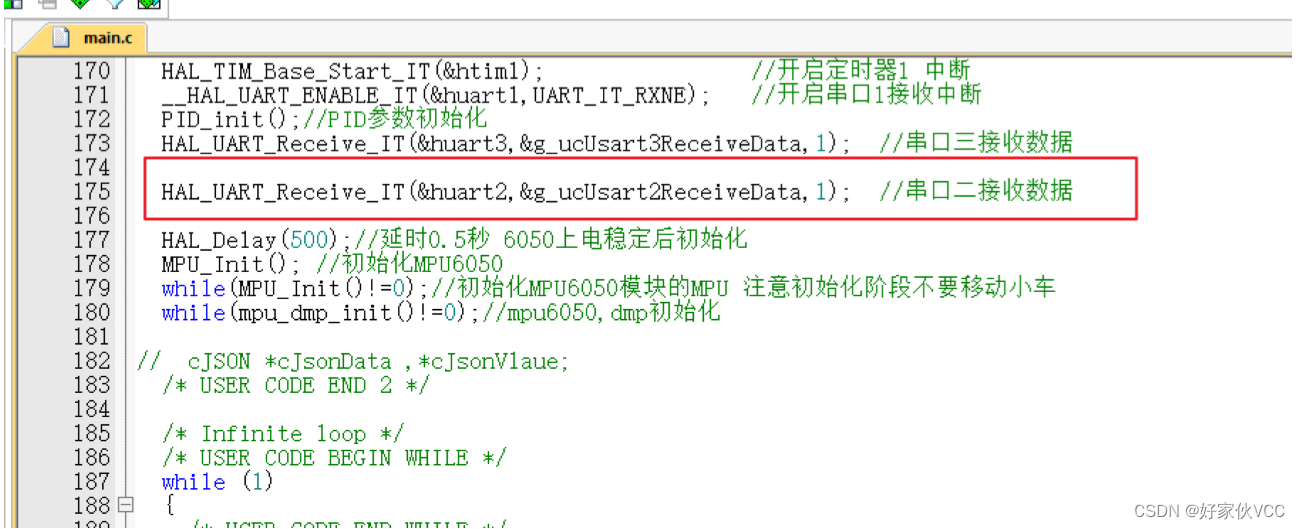
声明一下变量
c
extern uint8_t g_ucUsart2ReceiveData; //保存串口二接收的数据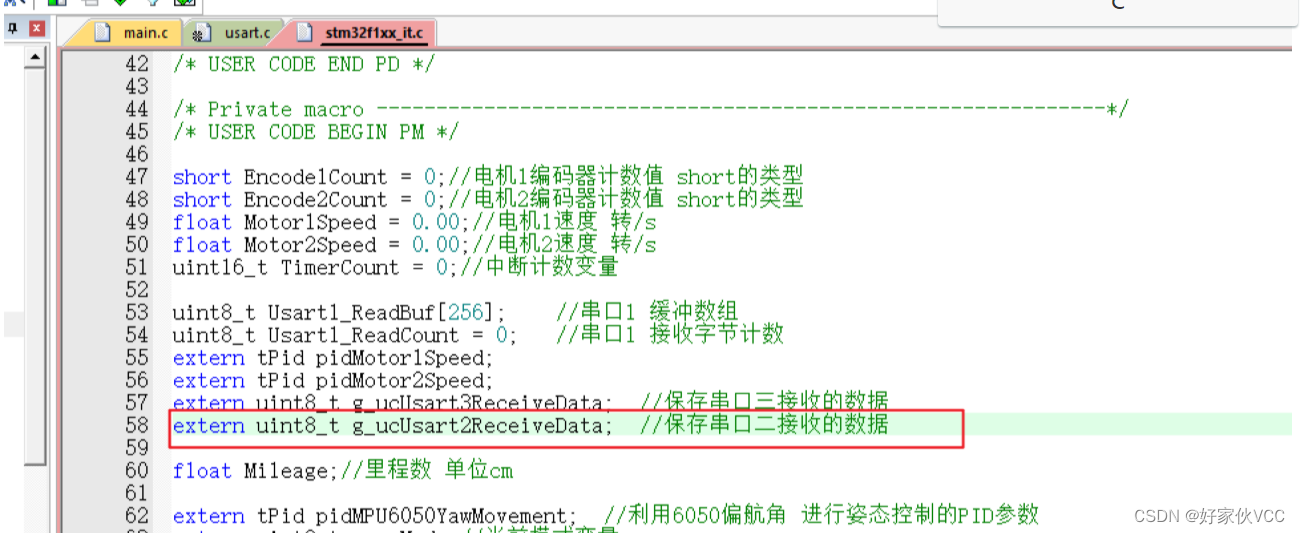
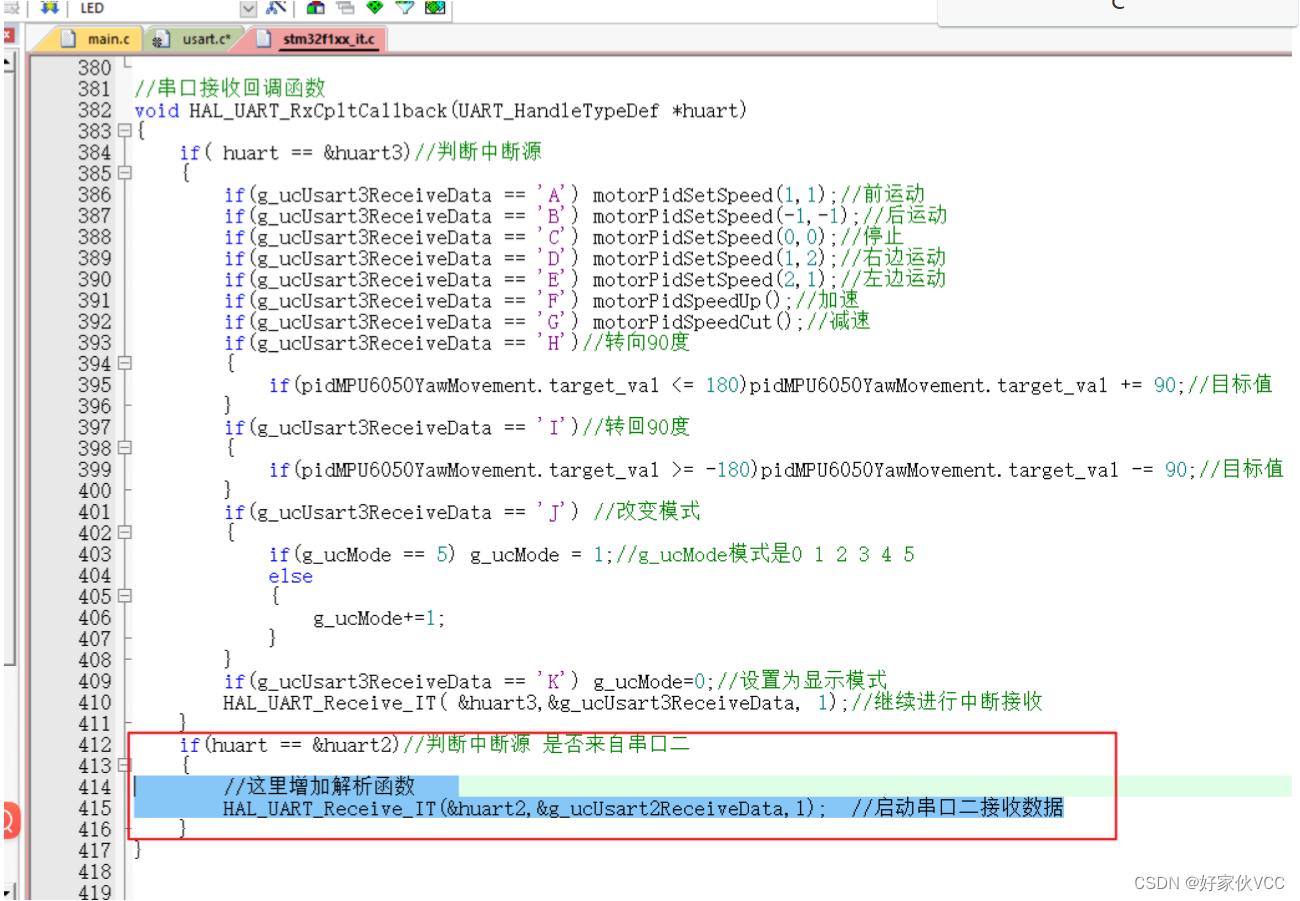
我们需要在串口中断回调函数中加入我们对接收到数据的解析
c
if(huart == &huart2)//判断中断源 是否来自串口二
{
//这里增加解析函数
HAL_UART_Receive_IT(&huart2,&g_ucUsart2ReceiveData,1); //启动串口二接收数据
}
在usart.c文件中定义一个函数
c
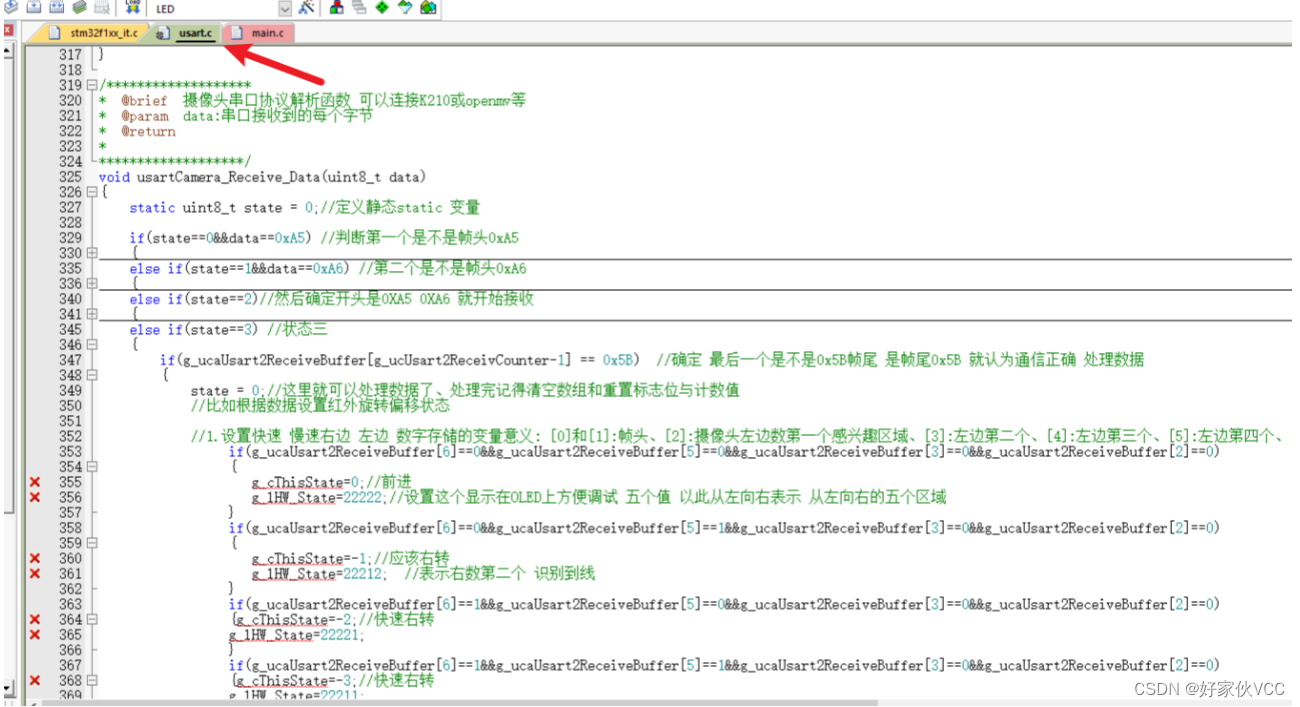
/*******************
* @brief 摄像头串口协议解析函数 可以连接K210或openmv等
* @param data:串口接收到的每个字节
* @return
*
*******************/
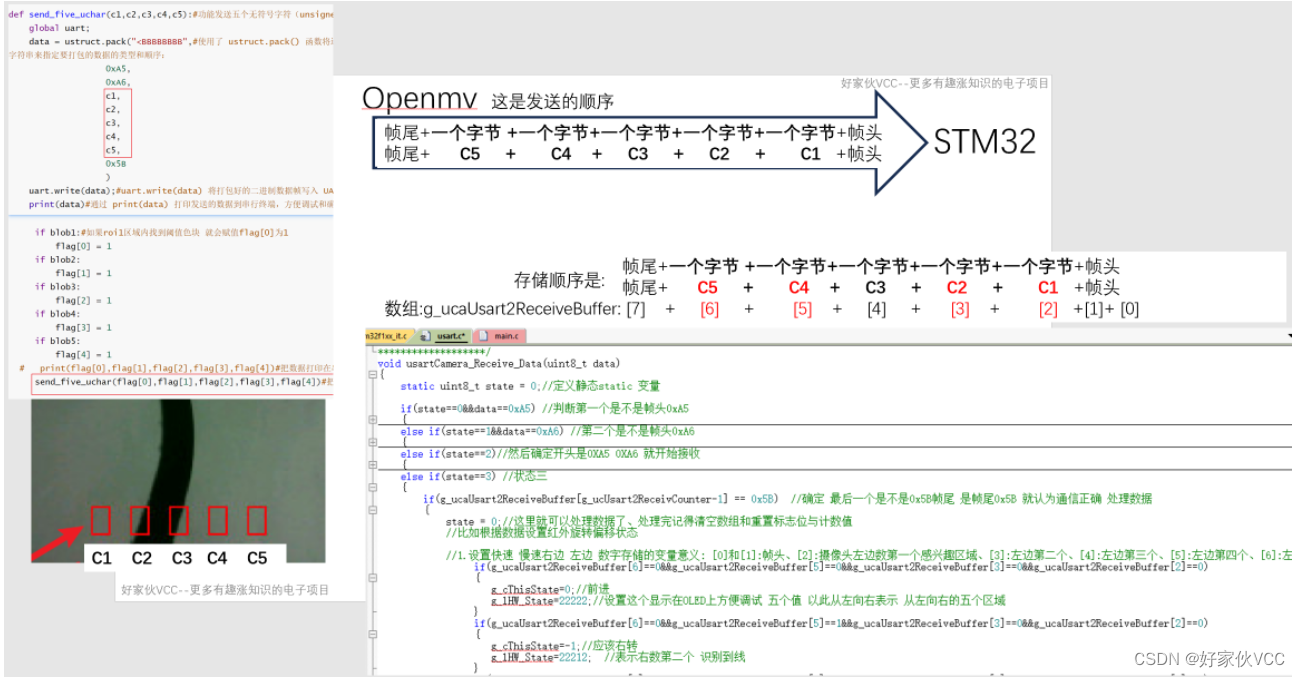
void usartCamera_Receive_Data(uint8_t data)
{
static uint8_t state = 0;//定义静态static 变量
if(state==0&&data==0xA5) //判断第一个是不是帧头0xA5
{
state=1;//是帧头0xA5 赋值state=1 表示接收下一个数据
//数据存储在数组中 "g_ucUsart2ReceivCounter++",这里是先用后加,比如g_ucUsart2ReceivCounter 初值为0,执行这个是先g_ucaUsart2ReceiveBuffer[0]=data,然后g_ucUsart2ReceivCounter++,即后g_ucUsart2ReceivCounter = 1的
g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter++] = data;
}
else if(state==1&&data==0xA6) //第二个是不是帧头0xA6
{
state=2;//如果第二个是帧头0xA6 赋值state=2 表示接收下一个数据
g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter++] = data;//保存数据
}
else if(state==2)//然后确定开头是0XA5 0XA6 就开始接收
{
g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter++]=data;
if(g_ucUsart2ReceivCounter>9||data==0x5B) state=3; //接收大于9个或者接收到帧尾0X5B 就置位状态三
}
else if(state==3) //状态三
{
if(g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter-1] == 0x5B) //确定 最后一个是不是0x5B帧尾 是帧尾0x5B 就认为通信正确 处理数据
{
state = 0; //这里就可以处理数据了、处理完记得清空数组和重置标志位与计数值
g_ucUsart2ReceivCounter = 0;//清零计数值
//比如根据数据设置红外旋转偏移状态
//1.设置快速 慢速右边 左边 数字存储的变量意义: [0]和[1]:帧头、[2]:摄像头左边数第一个感兴趣区域、[3]:左边第二个、[4]:左边第三个、[5]:左边第四个、[6]:左边第五个、[7]:帧尾
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{
g_cThisState=0;//前进
g_lHW_State=22222;//设置这个显示在OLED上方便调试 五个值 以此从左向右表示 从左向右的五个区域
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==1&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{
g_cThisState=-1;//应该右转
g_lHW_State=22212; //表示右数第二个 识别到线
}
if(g_ucaUsart2ReceiveBuffer[6]==1&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{g_cThisState=-2;//快速右转
g_lHW_State=22221;
}
if(g_ucaUsart2ReceiveBuffer[6]==1&&g_ucaUsart2ReceiveBuffer[5]==1&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{g_cThisState=-3;//快速右转
g_lHW_State=22211;
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==1&&g_ucaUsart2ReceiveBuffer[2]==0)
{g_cThisState=1;//应该左转
g_lHW_State=21222;
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==1)
{g_cThisState=2;//快速左转
g_lHW_State=12222;
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==1&&g_ucaUsart2ReceiveBuffer[2]==1)
{g_cThisState=3;//快速左转
g_lHW_State=11222;
}
//2.然后清空数组
for(int i=0;i<10;i++) g_ucaUsart2ReceiveBuffer[i]=0x00;//清空数组
}
else //不是帧尾说明通信错误重新开始接收
{
state=0;
g_ucUsart2ReceivCounter =0;
for(int i=0;i<10;i++) g_ucaUsart2ReceiveBuffer[i]=0x00;//清空数组
}
}
else
{ //其他异常清空
state=0;
g_ucUsart2ReceivCounter =0;
for(int i=0;i<10;i++) g_ucaUsart2ReceiveBuffer[i]=0x00;//清空数组
}
}然后声明一下变量
c
extern int8_t g_cThisState ;//这次状态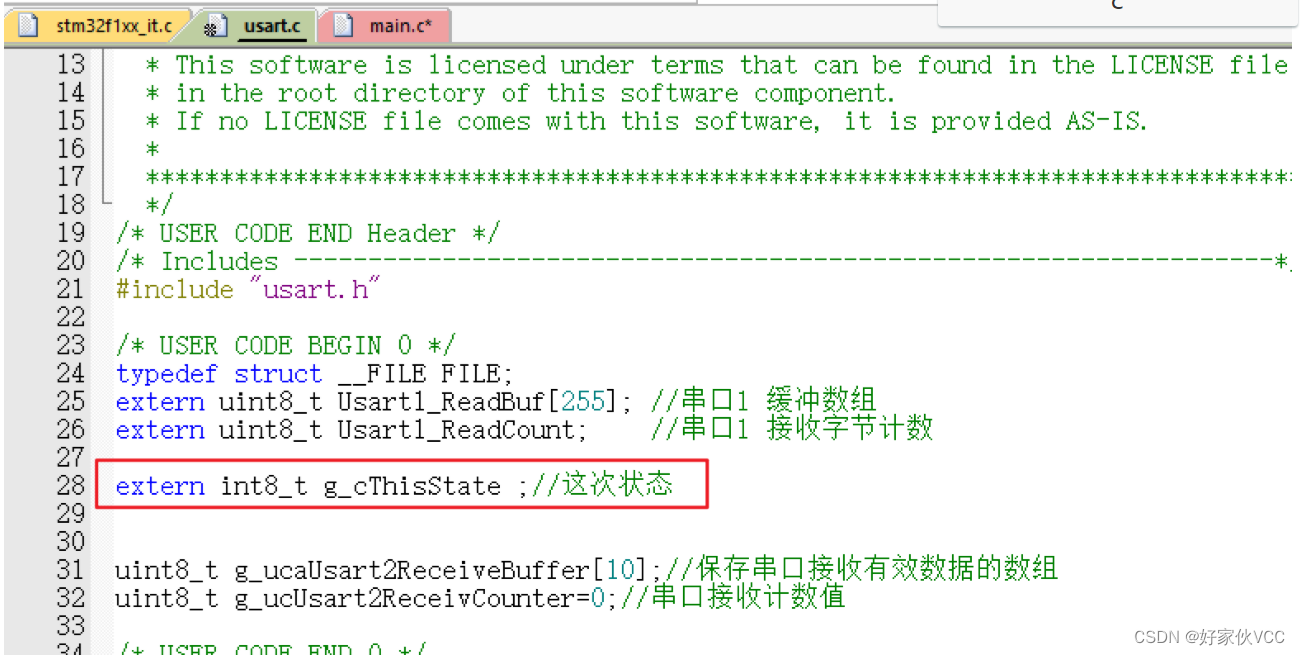
定义一个变量 并且在main文件中声明一下
c
int g_lHW_State = 0;//帮助视觉调试 用于表示红外对管或者视觉摄像头识别状态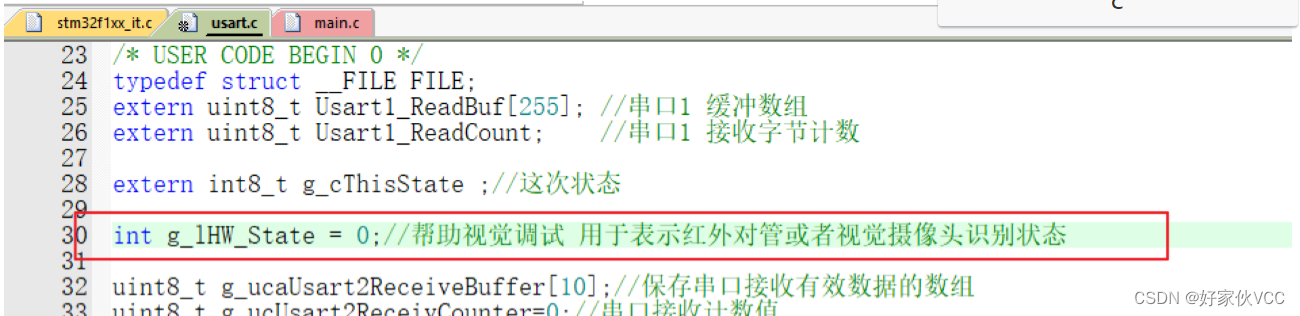
声明一下
c
extern int g_lHW_State;//帮助视觉调试 用于表示红外对管或者视觉摄像头识别状态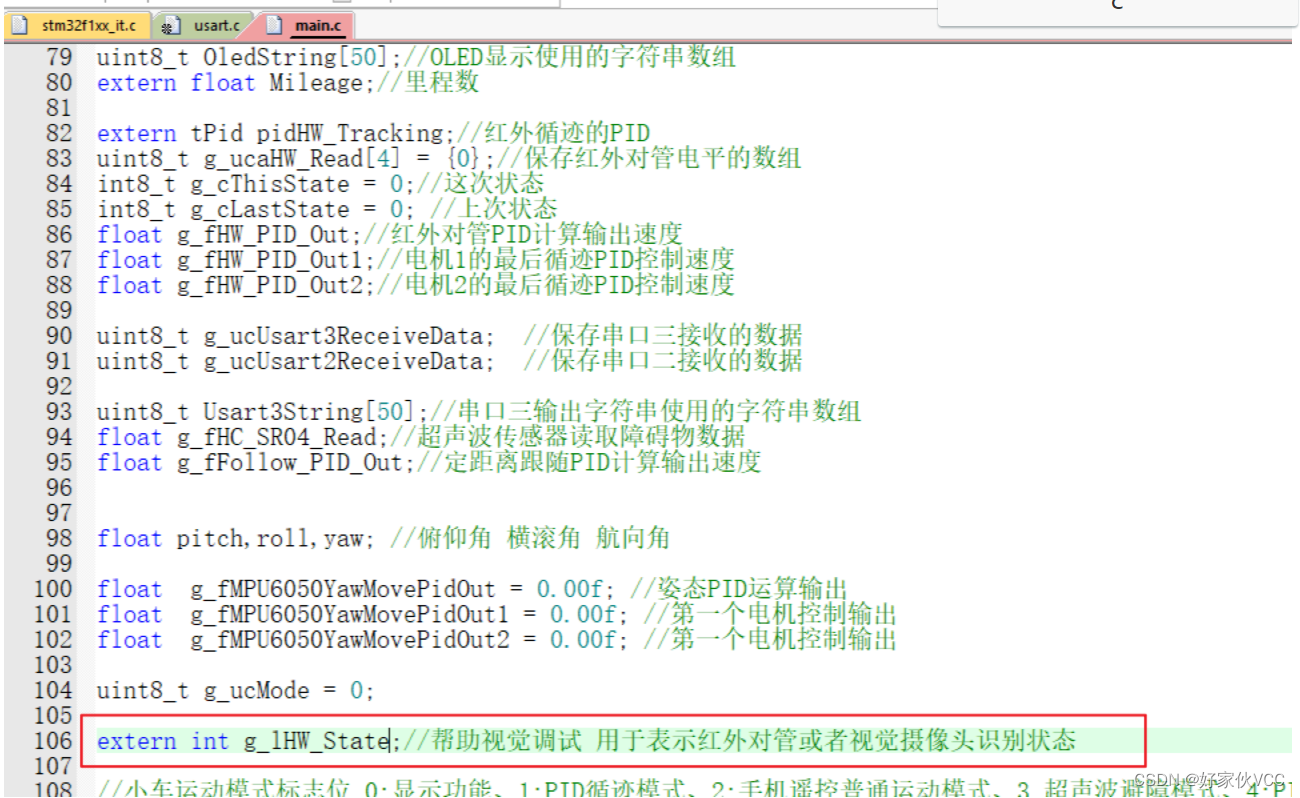
我们需要再定义模式,这个模式是视觉循迹模式
视觉模式下 我们显示一下,我们之前赋值的变量 以测试我们接收的数据是否正确。
c
//这里编写触发中断后要执行的程序
if(g_ucMode == 6) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5 6
else
{
g_ucMode+=1;
}
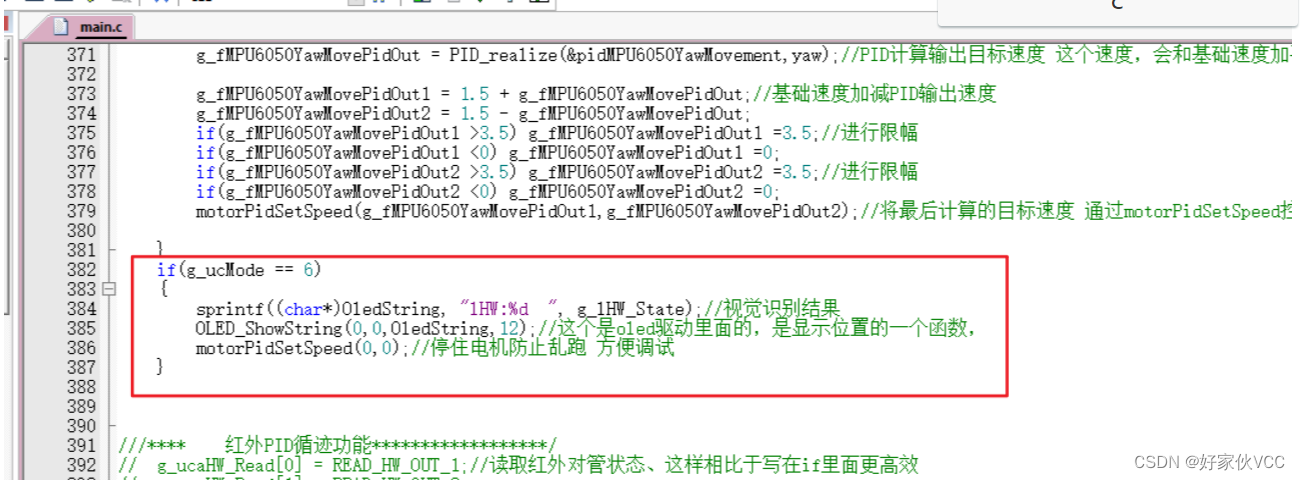
增加模式6,的功能,我们先只显示视觉识别结果
c
if(g_ucMode == 6)
{
sprintf((char*)OledString, "lHW:%d ", g_lHW_State);//视觉识别结果
OLED_ShowString(0,0,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
motorPidSetSpeed(0,0);//停住电机防止乱跑 方便调试
}
别忘记我们的解析函数,加到串口中断处理函数中
c
usartCamera_Receive_Data(g_ucUsart2ReceiveData);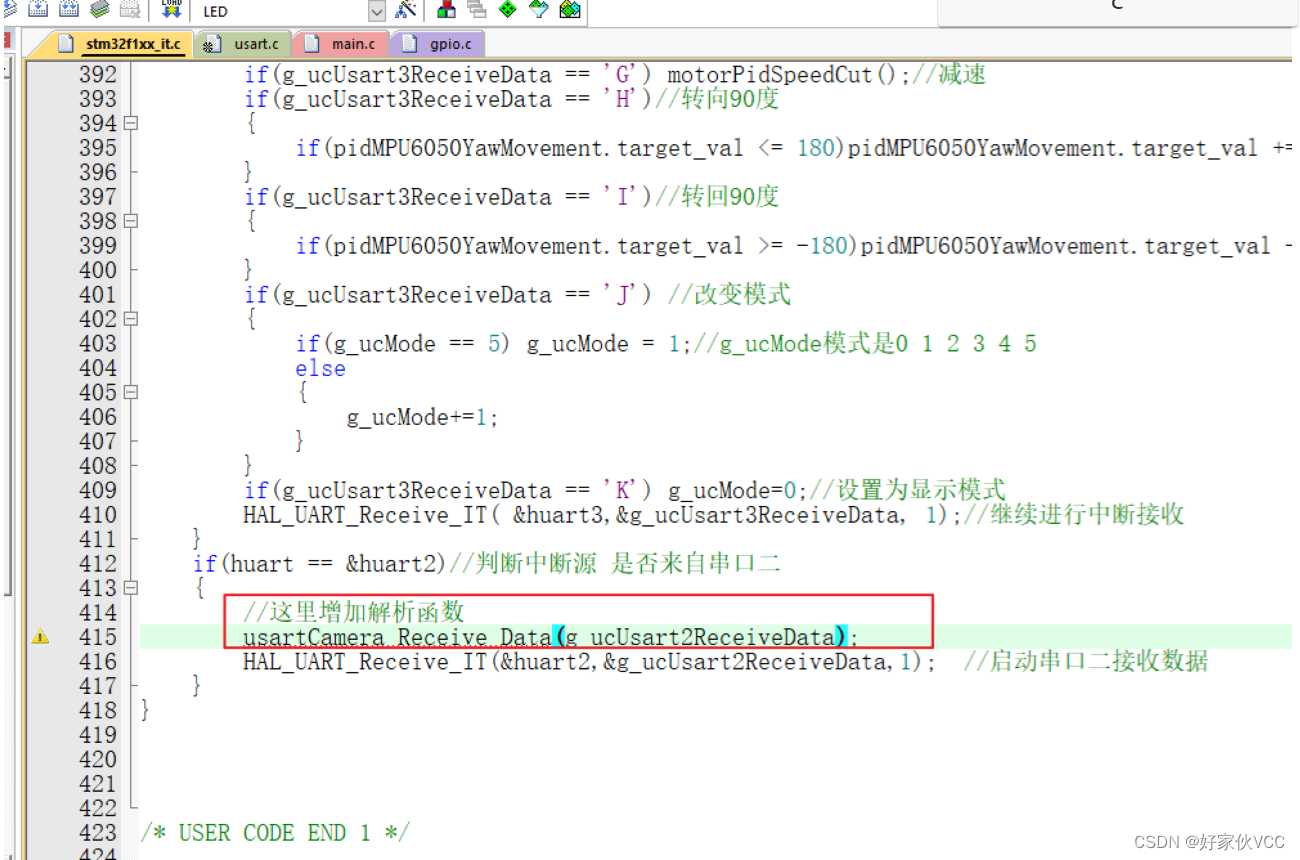
修改上面程序经过测试,单片机
编译上面程序,并烧录到我们的单片机、单片机连接到电脑、然后电脑模拟openmv发送正确格式的数据,手动点击SSCOM发送数据、单片机可以接收到数据并显示在OLED上(观察的是OLED的第一行数值变化)、当我们设置每1ms发送一次数据时候,单片机的OLED有时候会出现卡死的情况。所以是单片机串口接收大量数据卡死的情况,经过网上搜索发现解决问题的办法。
**这个博客是搜索到可以解决问题的链接:**https://blog.csdn.net/qq_44629109/article/details/131002223
参考博客如下部分:
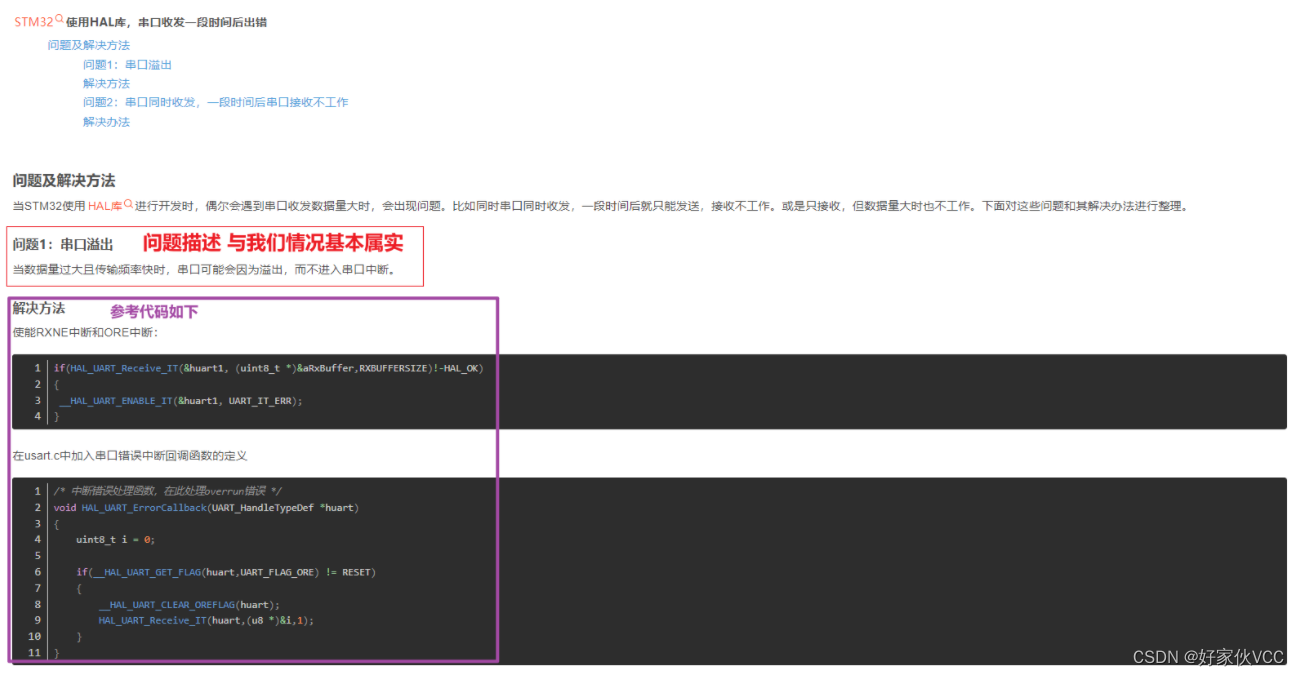
所以我们要更改如下代码:
c
__HAL_UART_ENABLE_IT(&huart2, UART_IT_ERR);// 启用UART2的错误中断功能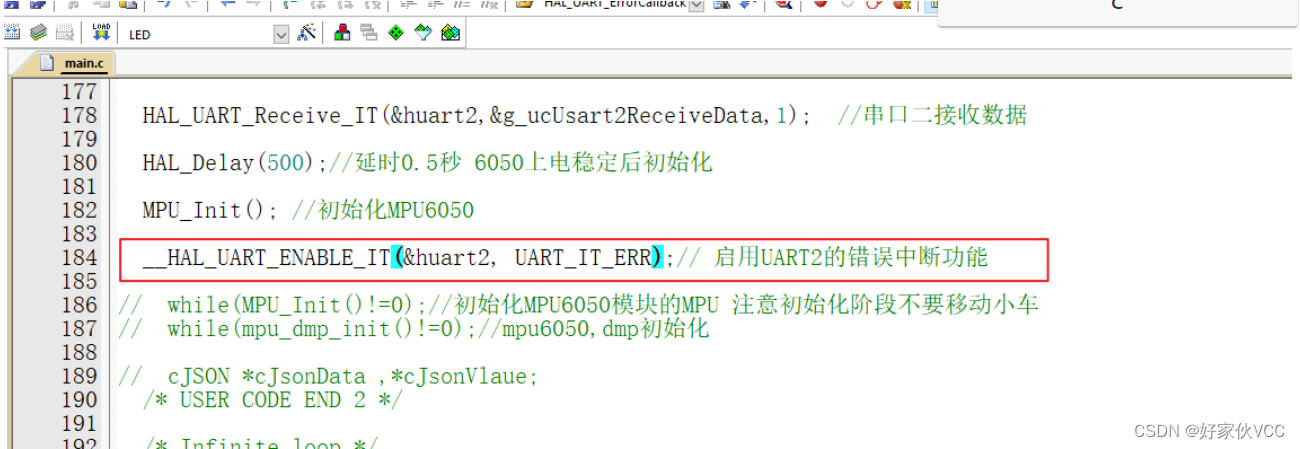
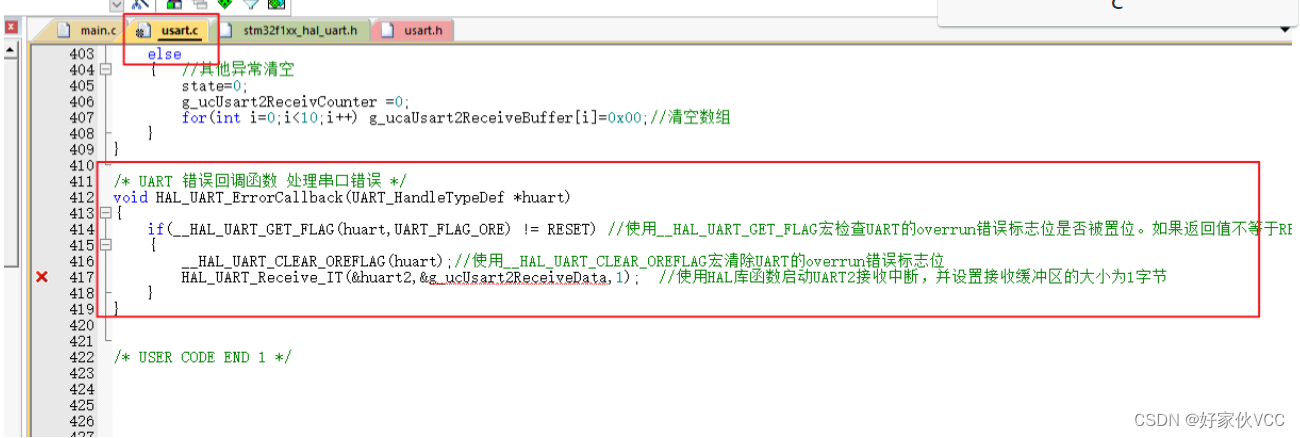
在USART.C 中添加如下代码
c
/* UART 错误回调函数 处理串口错误 */
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart)
{
if(__HAL_UART_GET_FLAG(huart,UART_FLAG_ORE) != RESET) //使用__HAL_UART_GET_FLAG宏检查UART的overrun错误标志位是否被置位。如果返回值不等于RESET,表示overrun错误标志位被置位,即发生了overrun错误
{
__HAL_UART_CLEAR_OREFLAG(huart);//使用__HAL_UART_CLEAR_OREFLAG宏清除UART的overrun错误标志位
HAL_UART_Receive_IT(&huart2,&g_ucUsart2ReceiveData,1); //使用HAL库函数启动UART2接收中断,并设置接收缓冲区的大小为1字节
}
}
添加串口2接收变量的声明
c
extern uint8_t g_ucUsart2ReceiveData; //保存串口二接收的数据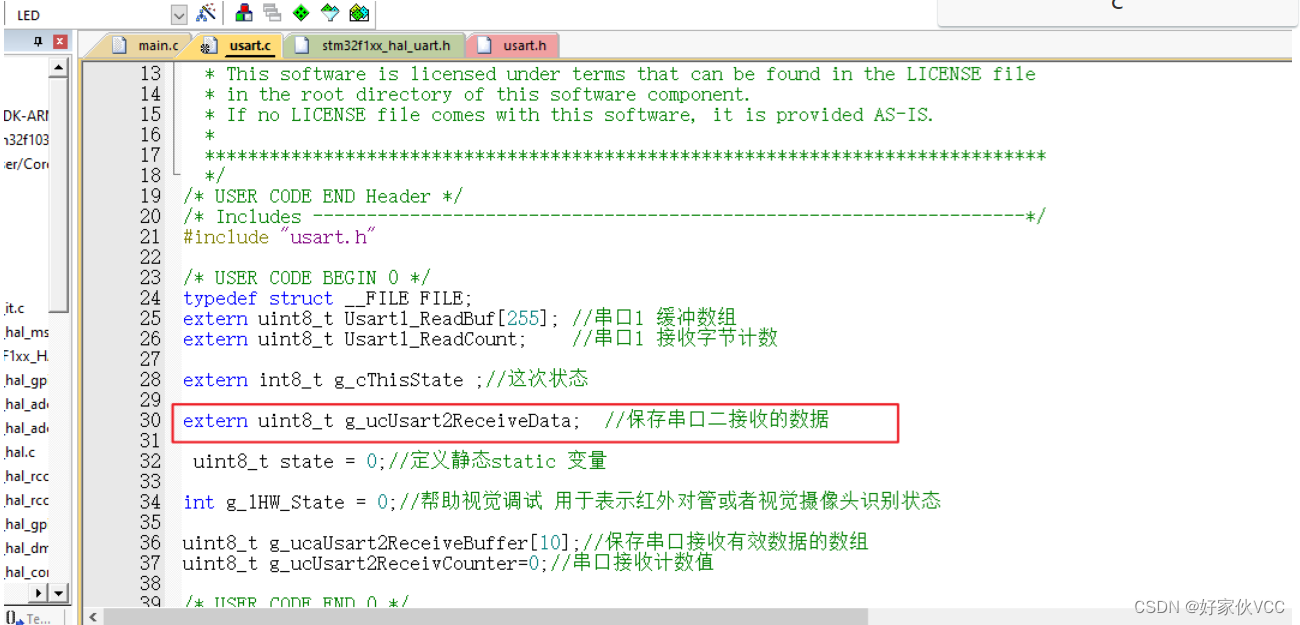
让单片机处于模式6(按六下 KEY1)
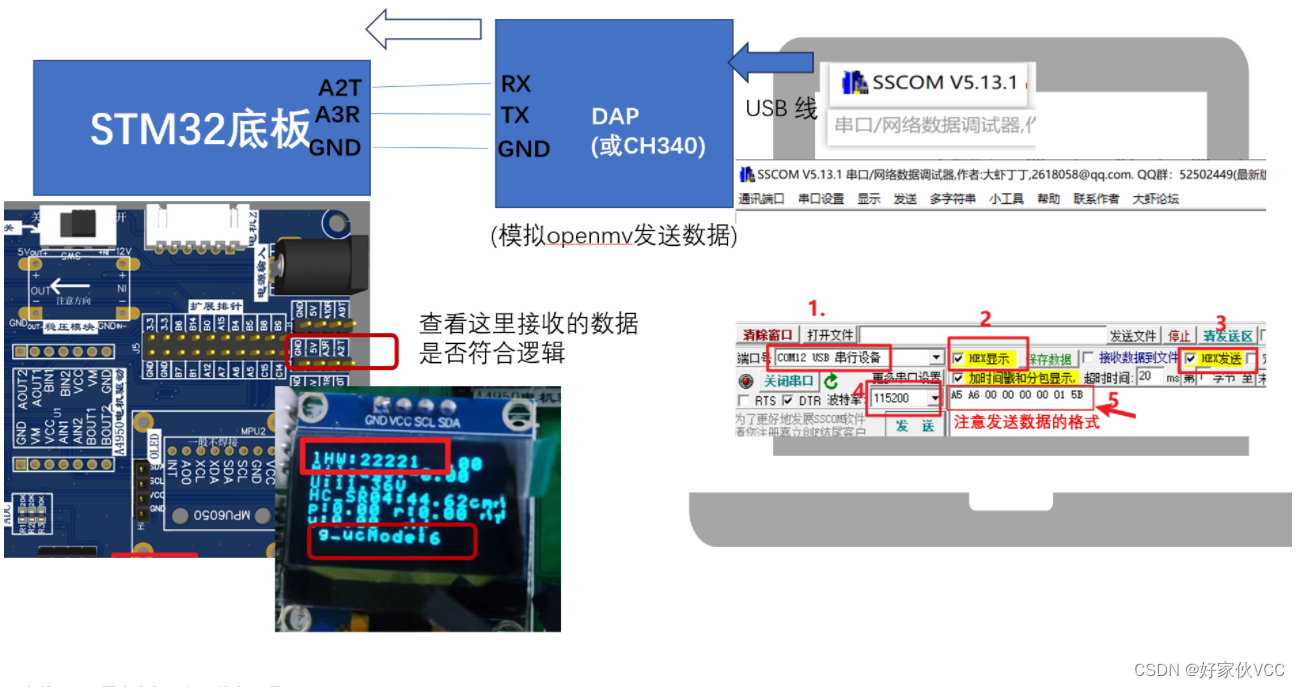
上面我们测试通过上位机发送数据,然后观察屏幕。
然后我们把STM32底板接到openmv,openmv连接电脑,openmv使用的程序是19章3节的程序19-3-openmv
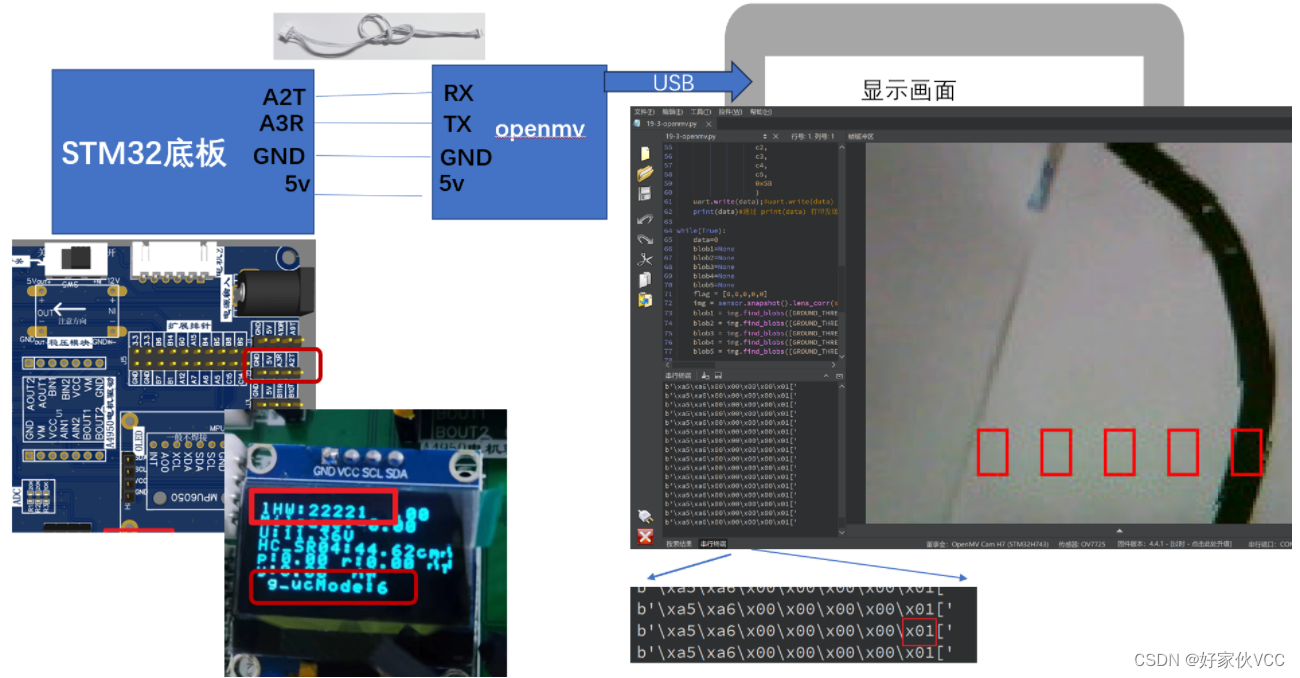
然后上面如果没有问题,就可以把openmv 程序通过"将打开的脚本保存到openmv Cam(作为main.py)"
接法如下:
这里就说明了如何接受的数据,后面的19.5讲解利用数据